Journal of Institute of Control, Robotics and Systems (2016) 22(10):847-852 http://dx.doi.org/10.5302/J.ICROS.2016.16.0169 ISSN:1976-5622 eISSN:2233-4335
서론 I.
최근 산업용 로봇 분야 중에서 델타로봇[1-3]은 주로 고 속포장 작업 자동화에 많이 적용되고 있으며정밀도를 요 구하는 3D 프린터 분야에도 적용되고 있다 고속 포장 작. 업 자동화에 적용되는 경우에는 고속 비전 영상처리 시스 템 또는 센서 시스템과 통신하여 컨베어어와 연동작업을 하므로 속도뿐만 아니라 정밀도를 확보해야 한다 또한. 3D 프린터 분야에서는 작업물의 정밀도를 높이기 위해서 높은 정밀도가 요구되는 것은 당연하다.
이를 만족시키기 위해 관련된 연구로 델타로봇 오차 모 델링에 관한 연구 가 있다 연구[4] . [4]에서 로봇의 오차를 계통오차와 우연오차 요인으로 크게 두가지 종류로 구분하 고 있다 계통오차는 주로 제작시 발생하는 가공 오차 조. , 립오차 등과 같은 기구학적으로 모델링이 가능한 오차를 말하고 우연오차는 주로 작업시 발생하는 외란 변형 백래, , , 시 등과 같이 모델링이 불가능한 오차를 말한다.
본 연구에서는 모델링이 가능한 계통오차를 설계단계에 서 최적화하기 위해 각 파라미터의 공차가 발생시키는 오 차를 분석하였다 이 결과를 적용하면 병렬로봇의 설계단. , 계에서 매우 엄격하게 공차를 유지해야하는 요소와 상대적 으로 덜 엄격하게 공차를 유지하더라도 기계적 정밀도에 영향을 적게 미치는 요소를 판단할 수 있으므로 더욱 효과 적으로 병렬로봇을 설계할 수 있을 것이다.
* Corresponding Author
Manuscript received August 29, 2016 / revised September 18, 2016 / accepted September 20, 2016
박찬훈 김두형 도현민 최태용 박동일 김병인 한국기계연구원 , , , , , : 로봇메카트로닉스연구실
([email protected]/[email protected]/[email protected]/taeyongc@
kimm.re.kr/[email protected]/[email protected])
자유도 병렬로봇의 기구학 및 설계 파라미터 정의 II. 3
델타로봇 기구학 은 역 기구학과 정 기구학으로 나눌[5]
수 있다 역방향기구학은 끝단의 위치. (Pc)가 주어질 때 능, 동 조인트 즉 모터의 회전각을 계산하는 것이고 정 기구, , 학은 반대로 모터의 회전각이 주어질 때 끝단의 위치를 계, 산하는 것이다[4][6]. 직렬로봇의 경우 정 기구학이 쉽고 역 기구학이 어려우나 병렬로봇인 델타로봇의 경우 쌍대성 원 리[5][7]에 의해 역기구학(Inverse kinematics)은 쉬우나 정기 구학(Forward kinematics)은 어렵다 따라서 정 기구학은 수. 치해석적인 방법을 통해 해를 구한다.
델타형 로봇의 위치 속도 그리고 가속도 해석을 위해,
병렬로봇의 설계공차 설정에 따른 기계적 정밀도의 영향 분석
The Effects of Design Parameters on the Mechanical Precision of an End Effector on a Parallel Kinematic Robot
박 찬 훈
*
, 김 두 형 도 현 민 최 태 용 박 동 일 김 병 인, , , ,(Chanhun Park1,*, Doohyung Kim1, Hyunmin Do1, Taeyong Choi1, Dongil Park1, and Byungin Kim1)
1
Department of Robotics and Mechatronics, Korea Institute of Machinery and Materials
Abstract: In this paper, important design parameters for parallel kinematic robots are defined, paying special attention to machining errors which may cause kinematic errors at the end effector of a robot. The kinematic effects caused by each design parameter, as well as their upper/lower limits, are analyzed here. To do so, we have developed a novel software program to compute kinematic errors by considering its defined design parameters. With this program, roboticists designing parallel kinematic robots can understand the important design parameters for which upper/lower allowances have to be strictly controlled in the design process. This tactic can be used for the design of high-speed, parallel kinematic robots to reduce the design/manufacturing costs and increase kinematic precision.
Keywords: parallel kinematic robot, design parameter, upper and lower limit, mechanical error, machining error
Copyright© ICROS 2016
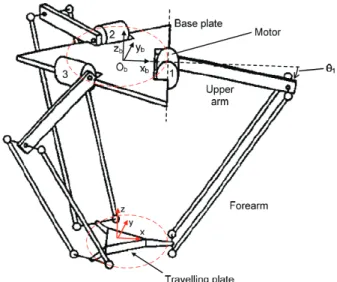
그림 1. 병렬로봇의 좌표계 정의.
Fig. 1. Definition of Coordinates of parallel kinematic robot.
848 Chanhun Park, Doohyung Kim, Hyunmin Do, Taeyong Choi, Dongil Park, and Byungin Kim
그림 과 같이 기구 파라미터를 정의한다 로봇의 베이스2 . 플랫폼의 중앙에 원점 를 가지는 좌표계{b} , Traveling를
중앙에 좌표계 를 정의한다 좌표계 의
plate {p} . {b} 축 방
향에 첫 번째 암이 설치되고 반시계 방향 120° 간격으로 각각 두 번째 세 번째 암이 설치된다 해석을 위해 그림, . 1 의 델타 로봇 암의 링크를 그림 와 같이 단순화하여 모델2 링한다.
그림 의 단순화 모델을 통해서 각 암의 운동 구속식을2 식 (1)과 같이 표현할 수 있고 이를 통해 로봇 끝단의 위, 치를 구할 수 있다.
(1)
본 연구에서 해석하고자 하는 설계 파라미터는 그림 과3 같이 정의 된다 또한 본 연구에서는 중앙 회전축에 의한. 회전 각도는 모터에 의한 직접적인 회전으로 간주하여 오 차가 발생하지 않는 것으로 무시하고 해석한다.
오차 해석 방법 정의와 해석 프로그램의 개발 III.
일반적인 직렬기구의 오차는 각 관절들이 직렬로 연결되 므로 공차에 의한 오차 또한 누적되는 경향을 가지는 것이 자명하다 그러나 병렬기구인 델타로봇은 각 관절이 병렬로. 연결되므로 오차가 누적되지 않고 평활화되는 경향이 있어 단편적으로 예측하기 어렵다 또한 델타로봇은 원점과 작업.
위치의 거리에 따라서도 공차가 발생시키는 오차가 달라질 것으로 예상된다 따라서 이를 고려한 해석을 수행할 필요. 가 있다.
본 연구에서는 주로 작업이 수행될 것으로 판단되는 위 치를 선정하여 그 위치에서 설계 공차에 의해서 발생하는 위치 오차를 해석하고 관찰한다.
위치 오차 해석은 그림 와 같은4 P1~P9의 측정위치에 대해서 각 파라미터 개만이 상한 하한 공차를 가질 때와1 / 모든 파라미터가 상한 하한 공차를 가질 때의 로봇 말단의/ 위치 오차를 해석한다. P1~P9의 위치는 다음과 같이 설정 한다.
1) P1의 위치는 작업 공간의 중심 위치로 설정한다. 2) 각 위치는 사용자에 따라 관심이 있는 임의의 위치로
수정 가능하다.
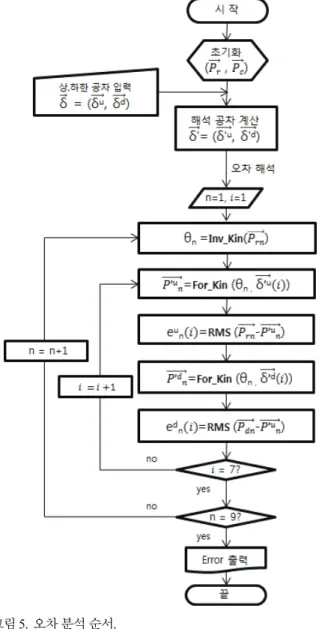
개발된 오차 해석 알고리즘을 시각화하여 간단히 정리하 면 그림 와 같다 위첨자 는 공차의 상한을 는 하한을5 . u d 나타낸다. 은 해석을 진행하는 로봇의 말단 위 치를 의미하며 은 에 도달하기 위해 역기구학을 풀어 서 계산된 조인트 각도를 의미한다.
그림 2. 그림 의 병렬로봇의 단순화 모델1 .
Fig. 2. Simple model of the parallel kinematic robot of Fig. 1.
그림 3. 해석 파라미터의 정의.
Fig. 3. Definition of kinematic parameter for analysis.
그림 4. 위치 오차 분석을 위한 해석 위치 정의.
Fig. 4. Definition of analaysis points for absolute error analysis.
표 1. 위치 오차 해석을 위한 공차의 명칭 정의.
Table 1. Definition of position error analysis.
설계값 공차 해석
베이스 조인트 옵셋 ′ 베이스 조인트 각도 ′ 베이스 반지름 ′ 플렛폼 반지름 ′ 모터 설치 높이 ′ 암 길이 ′ 레그 길이 ′
The Effects of Design Parameters on the Mechanical Precision of an End Effector on a Parallel Kinematic Robot 849
그림 5. 오차 분석 순서.
Fig. 5. Flow chart of error analysis.
오차 해석 방법은 아래와 같이 요약할 수 있다.
1) 우선 각각의P1~P9 점에서 입력한 링크 길이 공차가 모( 두‘0’) 정보로 역 기구학 해석 수행한다 그 해석 결과. 로 각 위치에 도달하기 위한 목표 모터의 각도를 찾P 는다.
2) 각 변수에 입력한 상 하한 공차를 기구학에 적용하여/ 공차에 의해 로봇 말단에 기구학적 오차가 나타날 수 있도록 한다.
3) 1)에서 구한 능동조인트 각도를 입력으로 하는 순방향 기구학을 수행하여 위치를 구한다.
4) 오차에 따라 변화되는 위치 궤적을 계산한다.
5) 오차를 정량적으로 표현한다. ( ′)
표 에서 구한 모터 각도와 공차가 포함된 링크 길이 ( 1
를 이용하여 순방향 기구학 해석한 결과는 각 공차에 의한 오차가 발생된 툴의 위치(′ ⋯)를 의미 하게 된다. 이때 변화된 위치를 거리(Distance,
∥
′∥
)로 나타낸다.)그림 6. 디자인 파라미터를 고려해서 기계적 정밀도를 계산하 기 위해 개발된 프로그램.
Fig. 6. A developed program to compute mechanical precision considering design parameters.
6) 각 파라미터에 대해 동일방법으로 반복하여 구한다.
7) 여러 개의 공차를 중복하여 적용하였을 경우에는 각각 의 공차의 조합 중 최대오차를 발생시키는 조합을 적용 하였을 경우의 에서의 최대 오차를 표현한다 그 외. 개별 공차를 적용한 경우는 상한공차만 적용하거나 하 한공자만 적용하는 두 경우에 대해 결과를 해석한다.
본 연구에서는 그림 의 해석 알고리즘을 적용하여 여러5 가지 디자인 파라미터와 공차의 상하한을 고려하여 기계적 정밀도의 변화를 계산하고 이를 효과적으로 시각화할 수 있는 프로그램을 개발하였다 그림( 6). 본 논문에서 보여 지 는 해석 결과는 모두 본 프로그램을 수행하여 얻어진 결과 이며이미지는 본 프로그램에 표시되는 표 및 그래프를 캡 처한 것이다.
오차 해석 결과 분석 IV.
본 연구를 통해서 나온 해석결과는 소형 델타로봇을 제 작하는데 적용될 것이다 해석결과를 위해 적용된 설계 파. 라미터는 표 와 같다 위치 오차 분석을 위한 측정 포인트2 . 는 표 로 정의하여 해석하였다3 .
우선 위치 오차 분석에 관해 분석하였다 위치 오차 분. 석은 설계 파라미터에 상 하한 공차를 각각 적용하여 분석/ 한다 이때 오차는 위치의 변화에. Norm을 취하여 계산되므 표 2. 병렬로봇 설계 파라미터.
Table 2. Design parameter of parallel robot.
850 박 찬 훈 김 두 형 도 현 민 최 태 용 박 동 일 김 병 인 , , , , ,
로 거리의 개념이다.
본 연구에서는 오차분석을 수행하기 위하여 C++에 기반 하여 해석 프로그램을 개발하였으며본 논문에서는 해석결, 과의 분석 파트에서는 해당 프로그램에 의한 해석결과 화 면을 사용한다.
1) 베이스 조인트 옵셋()에 상 하한/ 0.02mm 공차가 있 을 경우 그림 과 같이 해석 위치: 6 P7과P9위치 에서 의 오차가 가장 크게 발생하였다 베이스 조인
0.04mm .
트 옵셋(
)이 발생한 방향과 일치하는 수직 작업공간 에서 오차가 매우 크게 발생하는 것을 알 수 있다 설. 계상에서 발생한 오차에 비해서 실제로 반영되는 위치 오차가 증폭되어 나타남을 알 수 있다.2) 베이스 조인트 각도()에 ±0.02° 공차가 있을 경우: 해석 위치 P1에서는 오차가 나타나지 않고 P2~ P9위치 전체에서 매우 고른 오차의 양상을 보이고 있으며그 크기는0.060~0.067mm이다 따라서 베이스 조인트 각도. 의 오차는 작업공간의 전체 영역에 영향을 준다는 것을 알 수 있다.
3) 베이스 반지름()에 ±0.02mm 공차가 있을 경우: P1~
위치에서 의 오차가 발생한다 따라서
P9 0.014~0.018mm .
베이스 반지름 각도의 오차는 작업공간의 전체 영역에 영향을 준다는 것을 알 수 있다 그러나 베이스 반지름. 에서 발생한 오차가 로봇의 정밀도 측면에서 증폭되어 나타나지는 않음을 알 수 있다.
4) 플랫폼 반지름()에 ±0.02mm 공차가 있을 경우 해: 석 위치P1~ P9위치에서0.014~0.018mm의 오차가 발생 한다 따라서 플랫폼 반지름의 치수 오차는 작업공간의. 전체 영역에 영향을 준다는 것을 알 수 있다 또한 플. 랫폼 반지름의 치수 오차가 정밀도에 영향을 미치는 정 도는 베이스 반지름의 치수 공차가 영향을 미치는 정도 와 동일하다는 것을 알 수 있다 또한 플랫폼 반지름에. 서 발생한 오차가 로봇의 정밀도 측면에서 증폭되어 나 타나지는 않음을 알 수 있다.
5) 모터 설치 높이()에±0.02mm 공차가 있을 경우 해: 석 위치P3, P5, P7, P9 위치에서 최대의 오차0.054mm 의 오차가 발생한다는 것을 알 수 있다 작업공간의 아. 래쪽으로 갈수록 모터 설치 높이에 의한 오차의 영향이
심해진다는 것을 알 수 있다 또한 모터 설치 높이에서. 발생한 오차가 로봇의 정밀도 측면에서 증폭되어 나타 남을 알 수 있다.
6) 암 길이()에 ±0.02mm 공차가 있을 경우 해석 위치:
위치에서 최대의 오차 의 오차
P3, P5, P7, P9 0.0276mm 가 발생한다는 것을 알 수 있다 작업공간의 아래쪽으. 표 3. 위치 오차 분석을 위한 측정 포인트 정의.
Table 3. Definition of measure points for position error analysis.
측정 위치 값
X Y Z
P1 0 0 -300
P2 -100 100 -250
P3 -100 100 -350
P4 -100 -100 -250
P5 -100 -100 -350
P6 100 100 -250
P7 100 100 -350
P8 100 -100 -250
P9 100 -100 -350
그림 7. 의 공차에 의한 위치 오차.
Fig. 7. Absolute error caused by.
그림 8. 의 공차에 의한 위치 오차.
Fig. 8. Absolute error caused by.
그림 9. 의 공차에 의한 위치 오차.
Fig. 9. Absolute error caused by.
그림10. 의 공차에 의한 위치 오차.
Fig. 10. Absolute error caused by.
병렬로봇의 설계공차 설정에 따른 기계적 정밀도의 영향 분석 851
로 갈수록 암 길이 오차의 영향이 심해진다는 것을 알 수 있다.
7) 레그 길이()에 ±0.02mm 공차가 있을 경우 해석 위: 치 P1~ P9위치에서 0.045~0.071mm의 오차가 발생한다. 작업공간의 아래쪽으로 갈수록 암 길이 오차의 영향이 심해진다는 것을 알 수 있다 또한 레그 길이에서 발생.
한 공차가 로봇의 정밀도 측면에서 매우 심하게 증폭되 어 나타남을 알 수 있다.
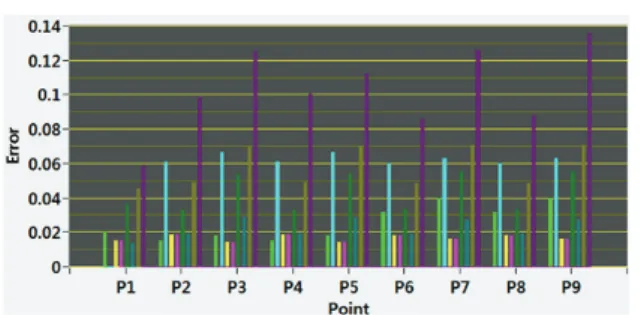
8) 모든 파라미터에 상 하한/ 0.02mm 와 ±0.02°의 공차가 최악으로 주어진 경우 그림: 12를 보면 전반적으로는 위치에서 매우 큰 위치오차가 발생하고 P3, P5, P7, P9
최대의 오차0.134mm의 오차가 발생한다는 것을 알 수 있다 또한 각각의 단일 오차 중 가장 심각한 영향을. 미치는 오차가 베이스 각도 및 레그길이 오차인데 모, 든 공차가 전부 영향을 미지는 경우에는 최악의 경우에 이들 공차에 의한 영향의 배까지 위치오차가 발생함을2 알 수 있다 또한 각각의 오차의 영향이 선형적으로 누. 적되지는 않는다는 것도 확인할 수 있다 그림. 12에서 녹색은 베이스옵셋 하늘색은 베이스 각도 노랑색은 베, , 이스 반지름 붉은색은 플랫폼반지름 녹색은 모터설치, , 높이 남청색은 암길이 어두운 노란색은 레그길이 보, , , 라색은 모든 종류의 에러가 있는 경우를 의미한다) 9) 모든 파라미터에 상 하한/ 0.04mm와±0.02°의 공차가 최
악으로 주어진 경우 공차의 상 하한이: / ±0.02mm인 경 우에 비하여 공차의 상 하한이/ ±0.04mm인 경우에는 발 현되는 위치 오차가 배로 되는 선형성이 나타난다2 .
결론 V.
본 연구에서는 고속 소형 병렬로봇의 설계에 있어 매우 중요한 파라미터를 그림 과 같이 선정하고 이들 파라미터3 의 실제 가공상 발생할 수 있는 기구학적 치수 공차의 상 하한을 규정한 다음 이들 공차 허용 범위에 의해서 발생할 수 있는 로봇 말단의 위치 정밀도 위치 에러로 분석함 를( ) 관찰하였다 이를 통해 각각의 설계 파라미터의 공차의 상. 하한이 얼마나 로봇의 최종 정밀도에 영향을 미치는 지를 분석하였다 분석과정에서는 각각의 파라미터의 공차의 상. 하한이 미치는 독립적인 영향과 전체 파라미터의 공차가 동시에 존재하는 상황에서 최악의 경우에 나타나는 최종 위치 에러를 모두 관찰하였다.
일부의 설계 파라미터의 공차 레그길이 는 로봇 말단의( ) 정밀도에 크게 증폭되어 나타났으며일부의 설계파라미터, 들의 공차 플렛폼 반지름과 베이스 반지름 는 최종정밀도에( ) 미치는 영향이 동일하였다 또한 일부의 설계 파라미터들의. 공차는 모터 설치 위치 베이스 반지름 플랫폼 반지름 베( , , , 이스 조인트 각도 작업공간 전체에 거의 고르게 영향을) 그림11. 의 공차에 의한 위치 오차.
Fig. 11. Absolute error caused by.
그림12. 의 공차에 의한 위치 오차.
Fig. 12. Absolute error caused by.
그림13. 의 공차에 의한 위치 오차.
Fig. 13. Absolute error caused by.
그림14. 모든 파라미터의 공차가 있을 경우 위치 오차 상 하한( / 와
0.02mm ±0.02°).
Fig. 14. Absolute error caused by all kind of design tolerance.
그림15. 모든 파라미터의 공차가 있을 경우 위치 오차 상 하한( / 와
0.04mm ±0.04°).
Fig. 15. Absolute error caused by all kind of design tolerance.
852 Chanhun Park, Doohyung Kim, Hyunmin Do, Taeyong Choi, Dongil Park, and Byungin Kim
미쳤으나 일부의 파라미터의 공차 베이스 조인트 옵셋 는( ) 작업공간상의 특정 방향으로 에러를 더 크게 유발시킨다는 것이 관찰되었다 또한 설계 파라미터 개별의 오차가 조합. 되어 오차를 발생시키므로 모든 공차 적용시 오차가 가장 큰 오차를 나타내지만 모든 개별 오차의 합은 아닌 것이 확인되었다 즉 직렬로봇과 달리 병렬 로봇의 특징에 따라. , 서 오차가 선형적으로 누적되는 것이 아니라 평균화되는 경향을 보였다.
가장 심각하게 로봇의 말단 오차에 영향을 주는 설계 파 라미터의 순서는 레그길이 베이스 각도 모터설치높이 순이> J >
다 또한 베이스 및 플랫폼 반지름은 동일 오차를 유발하며. 오차기여도가 상대적으로 낮다 따라서 설계시 설계 비용. 절감을 위해 공차를 느슨하게하여 설계하더라도 레그길이 와 관련한 설계 공차는 엄격하하게 유지할 필요가 있음을 알 수 있다.
REFERENCES
[1] R. Clavel, “Conception d’un robot parallèle rapide à 4 degrés de liberté,” Ph.D. Thesis, EPFL, Lausanne, Switzerland, 1991.
[2] R. Clavel, “Device for the movement and positioning of an element in space,” US Patent No. 4,976,582, Dec.
1990.
[3] J.-P. Merlet, Parallel Robots, Kluwer Academic Publishers, 2000.
[4] W. J. Shin and N. G. Cho, “A study on the error com- pensation of three-DOF translational parallel manipu- lator,” Transactions of the Korean Society of Machine Tool Engineering, vol. 13, no. 3, pp. 44-52, Jun. 2004.
[5] K. Miller, “Modeling of dynamics and model-based con- trol of DELTA direct-drive parallel robot,” Journal of Robotics and Mechatronics, vol. 17, no. 4, pp. 344-352, 1995.
[6] S. H. Lee, “Dynamic modeling of a novel ATC mecha- nism based on 4-bar linkage,” Journal of Institute of Control, Robotics and Systems, vol. 22, no. 4, pp.
307-314, 2016.
[7] X. Jin, J. Jung, J. P. Jun, S. Park, and J. O. Park,
“Calibration for a Planar Cable-Driven Parallel Robot,”
Journal of Institute of Control, Robotics and Systems, vol. 21, no. 11, pp. 1070-1075, 2015.
박 찬 훈
년 영남대학교 기계공학과 졸업
1994 .
년 기계공학과 석사
1996 POSTECH .
년 기계공학과 박사
2010 KAIST . 1996 년 월 현재 한국기계연구원 로봇메카2 ~ 트로닉스연구실 책임연구원 관심분야. 는 산업용 양팔로봇의 설계 및 제어, 군사용 양팔로봇의 설계 및 제어 고속 병렬형 로봇의 설계, 및 제어 인간 로봇 협업을 위한 직관적 교시기술 등, - .
김 두 형
년 서울대학교 기계설계학과 졸업
1982 .
년 기계공학과 석사
1990 KAIST . 2003 년 KAIST 기계공학과 박사졸업. 1982 년 현재 한국기계연구원 로봇메카트로~ 닉스연구실 책임연구원 관심분야는. 산업용 로봇 설계 및 제어.
도 현 민
년 서울대학교 전기공학부 졸업
1997 .
년 서울대학교 전기공학부 석사
1999 .
년 서울대학교 전기컴퓨터공학부 2004
박사. 2004년 월8 ~2007년 월 현대자3 동차 선임연구원. 2007년 월4 ~2010년 월 일본 특별연구원 현재 한국
5 AIST( ) .
기계연구원 로봇메카트로닉스연구실 선임연구원 관심분야. 는 산업용 로봇 제어 및 응용 로봇 안전 기술 신경망 기. , 반 학습 및 적응 제어 등.
최 태 용
년 전자전기공학과 졸
2003 POSTECH
업. 2010년KAIST 대학원 박사 석박사( 통합과정). 2010년 월2 ~2010년12월 삼 성전자 생산기술연구원 책임연구원.
년 월 현재 한국기계연구원 로봇 2011 1 ~
메카트로닉스연구실 선임연구원 관심. 분야는 산업용 로봇 제어 및 응용 산업 지능 등. .
박 동 일
년 기계공학과 졸업
2000 KAIST . 2002 년 KAIST 기계공학과 석사. 2006년 기계공학과 박사 현재 한국기
KAIST . .
계연구원 로봇메카트로닉스연구실 선 임연구원 관심분야는 로봇 설계 해석. , 및 응용 등.
김 병 인
년 충남대학교 기계공학과 석사
2006 .
년 충남대학교 기계공학과 박사
2012 .
현재 한국기계연구원 로봇메카트로닉. 스연구실 책임기술원 관심분야는 로. 봇 설계 생산기계 시스템 설계 및 구, 조 해석 및 응용 등.