평형감각 측정 및 훈련 시스템 개발
1)ㅎㅎ
전체 글
1)ㅎㅎ
수치
관련 문서
넷째, 슬관절 신전근 근력 검사 결과 훈련 전에 비해 훈련 후에 불안정지지면에서의 훈련군, 안정지지면에서 의 훈련군 모두 마비측의 슬관절 신전근의
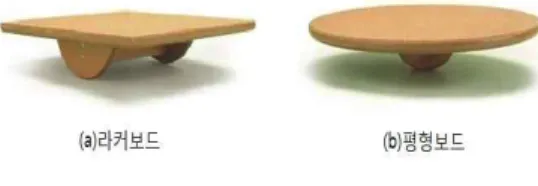
균형 훈련 플레이트 시스템의 불안정한 구조가 균형 능 력 훈련 동안 하지 관절 운동범위 및 근활성도 변화를 증진 시키는지 조사하여 균형 능력 훈련용 운동기기를
계측시스템 설치 기본방향 모니터링 기능 집중화 모니터링 기능 집중화 모니터링 기능 분산.. 설치형태 차량별 분산 설치 차량별
KEYWORDS: Gait rehabilitation (보행 재활), Lower-limb exoskeleton robot (하지 외골격 로봇), Rehabilitation robot (재활로봇), Hemiplegia gait training (편마비
가상 현실을 기반으로 하는 가상 훈련이 화재 소화 훈련 에 적용될 경우 안전을 보장하면서 훈련을 수행할 수 있다 는 큰 장점이 있다 본 연구에서는 가상 훈련
M.Tr분야는 유럽과 북미지역을 중심으로 절연유 가스분석, OLTC 모니터링 진단시 스템, 부싱 탭 모니터링 진단시스템, 변압기 본체 UHF 센서 부분방전 검출
구현된 로봇은 스테레오 카메라, 적외선 센서, 초음파 센서, 접촉 센서 등 다양한 센서 데이터를 사용하여 비평탄면 보행, 공차기, 원격 제어 및 3차원 모니터링 등 다양한
가령, 교관은 천리안위성 내부 장치의 중에서 지구 센서(그림 15의 AOCS 내에 표시)의 고장을 통해 훈련 목적을 달성하겠다고 결정했다면 그림 16과 같이 OPTS의
