Korean Journal of Remote Sensing, Vol.36, No.5-4, 2020, pp.1209~1220
https://doi.org/10.7780/kjrs.2020.36.5.4.6 ISSN 1225-6161 ( Print )
ISSN 2287-9307 (Online)
Article
산악지형에서의 재난피해조사를 위한 드론 맵핑 활용방안 연구
신동윤 1)·김다진솔2)·김성삼3)·한유경4)·노현주 1)†
A Study on the Use of Drones for Disaster Damage Investigation in Mountainous Terrain
Dongyoon Shin
1)·Dajinsol Kim
2)·Seongsam Kim
3)·Youkyung Han
4)·Hyunju Nho
1)†Abstract: In the case of forest areas, the installation of ground control points (GCPs) and the selection of terrain features, which are one of the unmanned aerial photogrammetry work process, are limited compared to urban areas, and safety problems arise due to non-visible flight due to high forest. To compensate for this problem, the drone equipped with a real time kinematic (RTK) sensor that corrects the position of the drone in real time, and a 3D flight method that fly based on terrain information are being developed. This study suggests to present a method for investigating damage using drones in forest areas. Position accuracy evaluation was performed for three methods: 1) drone mapping through GCP measurement (normal mapping), 2) drone mapping based on topographic data (3D flight mapping), 3) drone mapping using RTK drone (RTK mapping), and all showed an accuracy within 2 cm in the horizontal and within 13 cm in the vertical position. After evaluating the position accuracy, the volume of the landslide area was calculated and the volume values were compared, and all showed similar values.
Through this study, the possibility of utilizing 3D flight mapping and RTK mapping in forest areas was confirmed. In the future, it is expected that more effective damage investigations can be conducted if the three methods are appropriately used according to the conditions of area of the disaster.
Key Words: Natural Disaster, Drone Mapping, RTK, 3D topographic flight
요약 : 산림지역의 경우 도심지에 비해 무인항공사진측량 작업과정 중 하나인 지상기준점(ground control point, GCP) 측량이 제한적이며, 높은 산림 때문에 비가시권 비행으로 인해 안전문제가 발생한다. 이를 보완하기 위 해 드론의 위치를 실시간으로 보정하는RTK(real time kinematic) 드론과 지형정보를 기반으로 비행하는 3차원
Received September 21, 2020; Revised October 22, 2020; Accepted October 26, 2020; Published online October 27, 2020
1)
국립재난안전연구원 재난원인조사실 연구원 (Researcher, Disaster Scientific Investigation Division, National Disaster Management Research Institute)
2)
국립재난안전연구원 재난원인조사실 선임연구원 (Senior Researcher, Disaster Scientific Investigation Division, National Disaster Management Research Institute)
3)
국립재난안전연구원 재난원인조사실 시설연구사 (Research Officer, Disaster Scientific Investigation Division, National Disaster Management Research Institute)
4)
경북대학교 융복합시스템공학부 조교수 (Assistant Professor, School of Convergence and Fusion System Engineering, Kyungpook National University)
†Corresponding Author: Hyunju Nho ([email protected])
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License
(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in
any medium, provided the original work is properly cited.
1. 서론
4차 산업혁명이 도래한 뒤, 다양한 과학기술 중 하나 인 드론은 사진측량 , 방송, 구조, 감시 등 다양한 분야에 서 활용되고 있다 . 드론은 난접근 지역 정보 취득, 소규 모 지역 맵핑 등에 최적화 되어 있어, 소규모 재난지역 의 피해조사 관련 활용성이 증대되고 있다. 2015년 미국 국토안보부 (DHS), 재난관리청(FEMA), 뉴욕 주 등 9개 재난관리기관과 드론 제조사 , 보험사, 택배업계 등 32개 드론 관련 기관들은 소형부터 대형드론을 토대로 드론 성능별 9가지 재난활용 시나리오와 재난 유형별 운영 시나리오를 도출하였으며 , 이를 기반으로 시범지역에 서 검증하고 재난지역에서 드론 활용 방안을 제안하였 다(American Red Cross and Measure, 2015). 또한 대한민 국의 행정안전부는 안전사고 예방과 재난 안전관리 정 책을 추진하고 있으며 (MOIS, 2018), 특히 자연재해로 인한 피해지역의 복구 비 산정을 위해 드론 피해조사단 을 운영하고 있다 . 드론 피해조사단은 장마, 태풍 등으 로 인해 제방붕괴 , 도로유실, 교량붕괴, 산사태 등이 발 생한 지역을 드론으로 신속하게 정보를 취득한 뒤 피해 물량을 산정하여 재해대장에 입력하고 있다 . 재해대장 에 입력한 정보를 토대로 피해지역의 복구비를 산정하 고 복구대책이 수립된다(Kim et al., 2019).
드론을 활용한 재난분야에서 선행연구를 살펴보면 , Yun et al. (2011)과 Jung and Yun (2012)는 자연재난으로 인한 피해조사를 위해 UAV 기반 실시간 공중자료획득 시스템의 활용성을 평가하였으며 , Oh et al. (2016)은 재 난 피해조사를 위해 드론으로 재난현장의 정보를 신속 하게 취득하여 정사영상과 3D 모델을 생성하여 피해 전·후를 분석하여 피해면적을 산출하였다.
하지만 자연재난의 경우 , 특히 산림이 많은 지역은 높은 수목들로 인해 GNSS 수신오류가 빈번히 발생하고 주변 지형지물의 파괴로 인해 지상기준점 선점에 어려 움이 따르기 때문에 일반적인 지상기준점 측량을 통한 드론 맵핑은 실질적으로 원활한 작업을 수행하기에는 한계가 존재한다. 이러한 이유로 최근에 실시간으로 위 치를 보정하는 RTK 센서가 탑재된 드론이 등장하였다.
RTK 드론은 최소한의 지상기준점으로 정밀한 위치결 과값을 도출할 수 있어 지상기준점 측량 작업공정을 크 게 줄여주는 장점을 가지고 있다 (Taddia et al., 2019).
또한 산림지역에서 드론을 활용할 경우 , 높은 수목들 로 인해 드론 기체의 감시에 어려움이 따르고 경사가 심 한 지역을 촬영할 시 균질한 해상도의 영상을 획득하는 데 어려움이 발생하고 있다. 특히, 드론-조종기간 통신 단절로 인한 기체 제어 불능 상황이나 갑작스런 기상상 황 또는 배터리 문제로 인해 인명피해가 발생할 수 있 는 위험이 존재한다 . 이를 보완하기 위해 지형을 따라 일정 고도로 비행하는 3차원 드론 비행기술이 개발되 고 있다 . 지형의 고도를 따라 비행하기 때문에 기체의 가시권 비행에 용이하고 고도차가 심한 지역에서 최소 한의 비행운용으로 양질의 영상을 획득할 수 있기 때문 에 고도차이가 심한 지역에 효율적이다.
본 연구는 산림이 많은 재난현장에서의 효율적인 드 론 맵핑을 수행하기 위해 지상기준점의 영향이 적은 RTK 드론과 드론 감시, 고도차이가 심한 지형에서의 균질한 영상 획득을 위해 지형의 고도를 따라 비행하는 3차원 비행방법을 이용해 산림지역에서의 드론 맵핑의 활용방안을 제시하고자 한다 .
비행 방식이 개발되고 있다. 본 연구는 산림지역에서 재난피해조사를 위한 드론의 활용방안을 제시하기 위해 1) GCP 측량을 통한 드론 맵핑(normal drone mapping), 2) 지형정보를 기반으로 비행하는 드론 맵핑(3D flight drone mapping), 3) RTK 드론을 이용한 드론 맵핑(RTK drone mapping) 3가지 방법을 통해 위치정확도를 평가 하였으며, 그 결과 평면 위치오차는 2 cm, 높이오차는 13 cm 이내로 나타났다. 위치정확도 평가 후, 산사태 발 생 면적을 계산하여 체적 값을 비교했을 때 세 가지 방법 모두 유사한 결과를 보였다. 본 연구에서는 3D flight drone mapping, RTK drone mapping을 통해 산림지역에서 드론 맵핑이 가지는 한계를 극복하고 재난피해조 사의 활용 가능성을 확인하였다. 향후 다양하게 발생하는 재난상황을 감안하였을 때 재난지역의 여건에 따라 3가지 방법을 적절히 활용하면 보다 효과적인 피해조사를 수행할 수 있을 것으로 기대된다.
2. 연구방법
1) 연구흐름 및 연구지역
본 연구는 넓은 범위의 산지와 높은 고도의 산림 지역 에서의 드론 맵핑의 활용성을 평가하기 위해 다음과 같 은 3가지의 방법을 수행하였다. 가장 일반적인 방법인 지상기준점을 이용한 드론 맵핑 (normal drone mapping), 지형정보를 입력하여 일정한 고도를 유지하며 비행하 는 3차원 비행 맵핑(3D flight drone mapping), RTK 센서 가 탑재된 RTK 맵핑(RTK drone mapping)으로부터 정 사영상 및 Digital Surface Model(DSM) 자료를 구축한 뒤 위치 정확도 평가와 산사태 체적을 분석한다. 본 연구
Table 1. Specification of drones used in this study
Model Weight Flight time Position Accuracy
DJI Inspire 2 2,935 g
(with battery) 18 min Hor. 2.5 m
Ver. 0.5 m
Model Weight Flight time Position Accuracy
DJI Phantom 4 RTK 1,391 g
(with battery) 30 min Hor. 0.1 m
Ver. 0.1 m
Fig. 2. Location of this study area.Fig. 1. Flow-chart of this study.
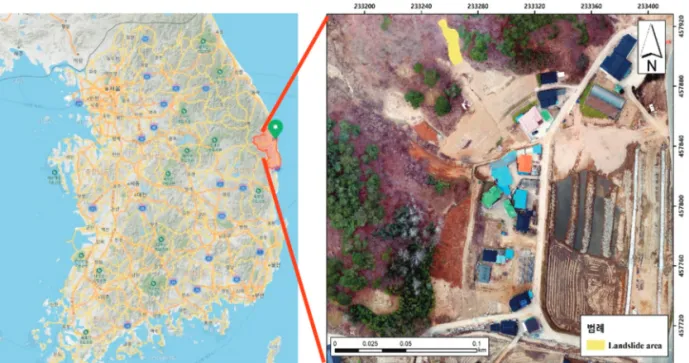
의 흐름은 Fig. 1과 같다. 연구지역은 경상북도 울진군 온정면으로 , 2019년 10월 태풍 ‘미탁’으로 인해 산사태 가 발생한 곳이다 (Fig. 2). Normal drone mapping과 3D flight drone mapping은 DJI의 Inspire 2를 활용하였으며, RTK drone mapping은 DJI의 Phantom 4 RTK를 이용하 였다. 본 연구에서 사용된 드론 및 카메라의 제원은 Table 1, Table 2와 같다.
2) 지상기준점을 이용한 기존의 드론 맵핑
지상기준점을 이용한 기존의 드론 맵핑의 경우 , 촬영
계획 수립 , 지상기준점 측량, 드론 촬영, 영상정합, 성과 물 제작 순으로 이루어진다 . 본 연구에서 촬영된 영상은 296장, 비행 고도는 주변 산지 높이를 고려하여 150 m, 종·횡 중복도는 70%로 계획하였으며, Ground Sample Distance(GSD)는 2.85 cm, 촬영면적은 0.301 km
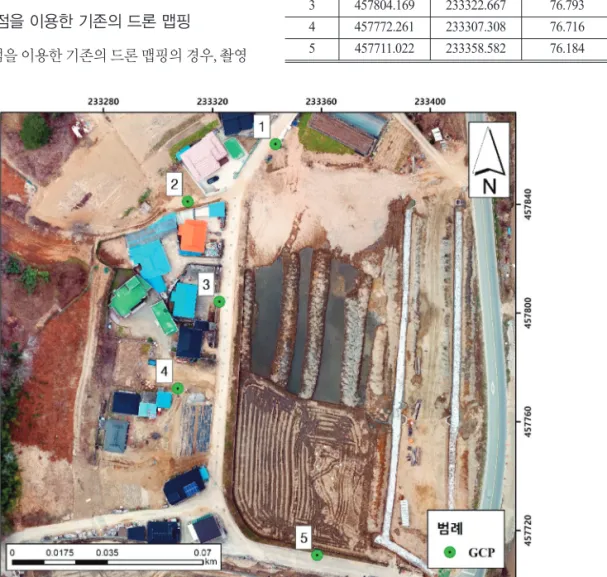
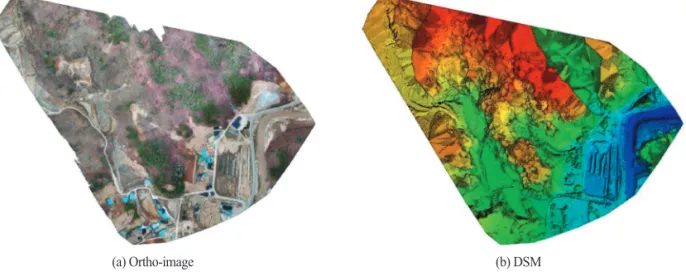
2이다 . 지 상기준점은 지형지물에 가려지지 않는 지점으로 선정 하고 타겟을 설치한 후 GNSS 장비를 이용해 VRS 방식 으로 총 5점을 측량하였다. 지상기준점의 분포와 좌표 성과는 Fig. 3과 Table 3과 같다. 촬영 영상의 처리는 Pix4D 소프트웨어를 사용하여 항공삼각측량 작업과 영 상정합 과정을 거쳐 정사영상 및 DSM을 생성하였다
Table 2. Specification of cameras mounted on dronesCamera Zenmuse X5S Phantom 4 RTK
Resolution 20.8 MP 20 M
FOV 72° 84°
Shutter speed 8-1/8000s 8-1/8000s
ISO 100-6400 (video)
100-25600 (picture) 100-6400 (video) 100-12800 (picture)
Mount detachable mounted
Fig. 3. Location of GCPs.
Table 3. GCP surveying results
Point X (m) Y (m) Z (m)
1 457862.175 233343.213 77.515
2 457841.020 233311.002 77.404
3 457804.169 233322.667 76.793
4 457772.261 233307.308 76.716
5 457711.022 233358.582 76.184
(Fig. 4). 영상의 geo-referencing 오차는 약 0.016 m로 양 호한 결과를 나타냈다 .
3) 3차원 비행 드론 맵핑
기존의 드론 맵핑은 설정된 비행고도에서 수평적으 로 비행하면서 영상을 촬영한다. 광활한 지역 또는 높 은 지형지물이 없는 지역에서의 맵핑은 효과적이지만 높은 빌딩 또는 산림이 존재하는 복잡한 산림지형에서 의 맵핑은 다양한 문제점이 발생한다 . 산림이 넓게 분 포하고 해발이 높은 산악지형일수록 비가시권 비행과 기체 -조종기 통신단절, 산악지형의 고도차이로 인한 상 이한 GSD가 발생하여 맵핑 산출에 대한 균질한 품질을 보장하기 어려운 실정이다 . 이를 극복하기 위해 급경사 지역을 고도별로 여러 번 촬영하여 맵핑하거나 Digital Elevation Model(DEM)과 같은 3차원 지형정보를 활용 한 3차원 비행 드론 맵핑 기술들이 개발되고 있으며 모
식도는 Fig. 5와 같다. 3차원 비행 드론 맵핑의 특징을 이 용해 한국임업진흥원에서는 산악지형 예찰을 위해 산 악지형 맞춤형 자동비행 프로그램을 개발하여 활용하 고 있으며(KFPI, 2018), Melita et al. (2020)은 복잡한 지형 또는 산악지형에서의 저고도 비행을 통한 세부 정보를 취득하기 위해 DSM을 이용하여 회전익 드론 비행방법 을 제시하였다.
본 연구에서도 연구지역의 지형정보를 비행계획을 수립할 때 업로드한 후 , 드론 영상을 취득하였다. 고도 차이가 있는 산림에 따라 고도별 비행을 하지 않으므로 , 3D flight drone mapping은 normal drone mapping보다 드 론을 띄우는 횟수가 적고 넓은 범위를 촬영할 수 있었다 . Fig. 6은 연구지역의 비행코스를 나타내고 있다. 촬영된 영상은 247장, 비행고도는 150 m, 지형과의 이격거리는 안전사고 예방을 위해 50 m, 종·횡중복도는 70%, GSD 는 3.69 cm, 촬영면적은 0.527 km
2이다 . Normal drone (a) Ortho-image (b) DSM
Fig. 4. Ortho-image and DSM generated from normal drone mapping.
Fig. 5. Schematic concept of 3D flight drone mapping.
mapping과 마찬가지로 동일한 지상기준점(5점)을 사용 하였고 영상의 geo-referencing 오차는 0.012 m, 정사영 상 및 DSM은 Fig. 7과 같다.
4) RTK 드론을 활용한 드론 맵핑
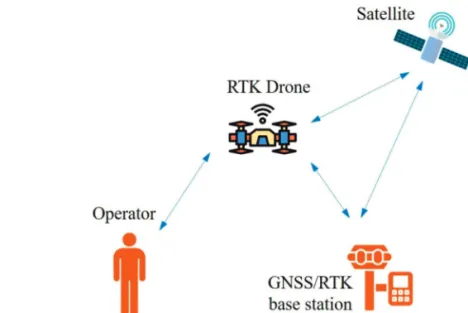
재난현장 중 특히 , 산사태 피해현장과 같은 수목으로 둘러쌓인 산악지역에서의 지상기준점 측량은 GNSS 수 신오류와 이로 인한 위치 오차 발생 등 현실적으로 여 러 가지 문제를 야기한다 . 이런 문제를 해결하기 위해 상업용 RTK 센서가 탑재된 드론이 개발되면서 드론 맵 핑 분야에 활용되고 있다. RTK 드론의 운영 방식은 주 파수 채널이나 Wi-Fi와 같은 데이터 링크를 통해 GNSS
기지국이나 지상 기준국과 연결되며 드론에 탑재된 카 메라 위치는 GNSS 위성과 지상의 기지국으로부터 실 시간으로 계산된다 (Fig. 8). 그러나 실시간으로 위치정 보를 계산하기 때문에 위성의 오차 또는 지형지물로 인 한 전파의 간섭이 발생할 경우 정확도가 떨어지는 단점 이 존재한다 .
Peppa et al. (2019)과 Cho et al. (2020)은 phantom 4와 phantom 4-RTK 드론 비교를 통한 RTK 드론의 위치 정 확성을 입증하였다 . 또한 Taddia et al. (2019)은 길게 분포 하고 있는 해안선 측량의 경우 , 지상기준점 설치와 측 량은 실질적으로 시간 소요가 크기 때문에 RTK 드론을 이용한 해안선 측량방법을 제시하였다 .
Fig. 6. 3D flight path of drone in this study.
(a) Ortho-image (b) DSM
Fig. 7. Ortho-image and DSM generated from 3D flight drone mapping.본 연구에서는 지상기준점을 설치하지 못하는 경우 를 대비하여 지상기준점 성과 없이 RTK 드론영상을 활 용하였다 . 촬영된 영상은 208장, 주변 지형을 고려하여 비행고도는 150m, 종·횡 중복도는 70%, GSD = 4.09 cm, 촬영면적은 0.438 km
2이고 정사영상 및 DSM은 Fig. 9와 같다 .
3. 연구결과
1) 위치 정확도 비교
위치 정확도 비교를 위해 검사점을 측량하는 것이 필
수적이지만 최근 드론 정확도 연구를 살펴보았을 때 지 상기준점을 통해 제작된 정사영상의 정확도는 대체적 으로 우수한 정확도를 보여주고 있다 (Barba et al., 2019;
Manfreda, 2019; Hugenholtz et al., 2013). 본 연구에서는 normal drone mapping 성과를 참값(reference)으로 활용 하여 , Fig. 10처럼 normal drone mapping 정사영상에서 임의의 검사점을 추출한 후 3D flight drone mapping, RTK drone mapping 간 위치 정확도 비교를 수행하였다.
Table 4는 normal drone mapping과 3D flight drone mapping의 검사점 위치 정확도 비교 결과이다. 전체적 으로 확인하였을 때, X = 0.023 m, Y = 0.021 m, Z = 0.040 m로 평면 위치오차는 2 cm, 높이오차는 4 cm였다. 고도
Fig. 8. Schematic concept of RTK drone mapping.(a) Ortho-image (b) DSM
Fig. 9. Ortho-image and DSM generated from RTK drone mapping.차가 있는 영상을 사용하더라도 지상기준점을 활용한 경우, normal drone mapping과 비교하였을 때 위치 정확 도는 우수한 편으로 나타났다 .
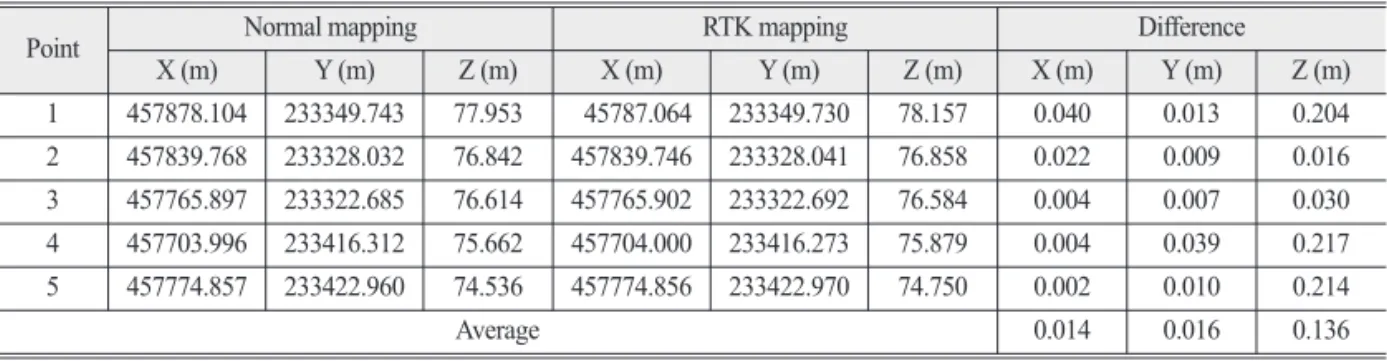
Table 5는 normal drone mapping과 RTK drone mapping
의 검사점 위치 정확도 비교 결과이다 . 전체적으로, X = 0.014 m, Y = 0.015 m, Z = 0.136 m로 평면 위치오차는 약 1 cm, 높이오차는 약 13 cm였다. 특히 검사점 1, 4, 5 번에서 높이 값이 약 20 cm로 큰 차이를 보였으며, 이는
Fig. 10. Location of check points.Table 4. Comparison of position accuracy of CPs for normal drone mapping and 3D flight drone mapping
Point Normal mapping 3D flight mapping Difference
X (m) Y (m) Z (m) X (m) Y (m) Z (m) X (m) Y (m) Z (m)
1 457878.104 233349.743 77.953 457878.139 233349.716 77.983 0.035 0.027 0.031
2 457839.768 233328.032 76.842 457839.782 233328.084 76.819 0.014 0.052 0.023
3 457765.897 233322.685 76.614 457765.916 233322.700 76.592 0.019 0.014 0.022
4 457703.996 233416.312 75.662 457703.980 233416.302 75.718 0.016 0.010 0.056
5 457774.857 233422.960 74.536 457774.828 233422.962 74.470 0.029 0.002 0.066
Average 0.023 0.021 0.040
Table 5. Comparison of position accuracy of CPs for normal drone mapping and RTK drone mapping
Point Normal mapping RTK mapping Difference
X (m) Y (m) Z (m) X (m) Y (m) Z (m) X (m) Y (m) Z (m)
1 457878.104 233349.743 77.953 45787.064 233349.730 78.157 0.040 0.013 0.204
2 457839.768 233328.032 76.842 457839.746 233328.041 76.858 0.022 0.009 0.016
3 457765.897 233322.685 76.614 457765.902 233322.692 76.584 0.004 0.007 0.030
4 457703.996 233416.312 75.662 457704.000 233416.273 75.879 0.004 0.039 0.217
5 457774.857 233422.960 74.536 457774.856 233422.970 74.750 0.002 0.010 0.214
Average 0.014 0.016 0.136
지상기준점 성과가 반영되지 않아 정확한 높이 계산에 오차가 발생한 것으로 판단된다 . RTK 드론을 사용하 더라도 지상기준점을 1~2점은 활용하는 것이 바람직 하지만 본 연구에서는 지상기준점의 선점과 측량이 어 려운 재난상황을 고려하여 지상기준점 성과를 고려하 지 않고 드론 맵핑 정확도를 평가하였다 . 그럼에도 불 구하고 평면 위치오차는 normal drone mapping과 비교 하였을 때 큰 차이가 없었다 .
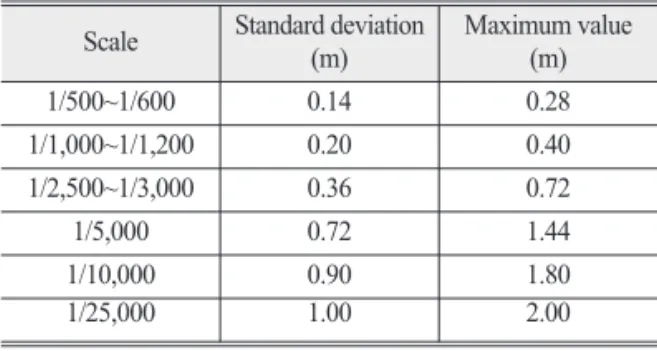
2) 항공사진측량작업규정에 따른 정확도 평가
일반적으로 항공사진측량 성과 판단의 기준이 되는
「항공사진측량작업규정의 도화축척별 평면위치와 표 고의 잔차 기준」을 참고하여 정확도 검증을 수행하였다 . 작업규정에 따르면 , 도화축척, 항공사진축척, GSD의
관계와 항공삼각측량의 위치오차의 한계는 Table 6, Table 7과 같다. 본 연구에서 수행된 3가지 방법의 GSD 는 모두 2.85 cm, 3.69 cm, 4.09 cm로 GSD가 8 cm 이내에 속하기 때문에 도화축척은 1/500 ~ 1/600에 해당한다.
1/500 ~ 1/600 도화축척의 평면 위치 및 높이오차는 0.14 m 이내로 세 가지 방법의 평면위치 및 표고 오차를 분석하였다 .
Table 8은 두 가지 방법에 대한 위치 오차를 나타낸 것이며 , 모두 항공사진측량 작업규정의 허용범위에 속 하는 것을 확인할 수 있다. 3D flight drone mapping은 지 상기준점 성과를 반영하였기 때문에 지상기준점 성과 를 반영하지 않은 RTK drone mapping 보다 높이 오차의 범위가 작게 나타났다 . 그러나 두 가지 방법 모두 cm단 위 내의 오차를 나타내고 있으며 , 피해조사를 수행하기 위한 정확도는 충분하다고 판단된다 .
3) 산사태 체적 비교
위치 정확도 분석을 통해 정확도를 확보한 후 , 드론 맵핑 성과물을 피해조사에 활용가능한지를 평가하기 위해 산사태 지역의 체적을 계산하였다 . 무인항공기를 활용한 체적 계산은 다양한 연구들을 통해 신뢰성이 검 증되고 있다 . Stalin and Gnanaprakasam (2017)은 UAV를 통해 생성된 DEM을 통해 모래 체적을 산정하였고, Arango and Morales (2015)은 토사 비축량의 값을 구하 기 위해 UAV의 DSM 자료를 활용하여 체적의 부피를 정밀하게 산정한 바 있다 . 따라서 본 연구도 세 가지 방 법에 대해 산사태 피해조사의 활용성을 평가하기 위해 산사태로 인한 피해 체적을 분석하였다 .
산사태 발생지의 체적 계산을 위해 3차원 점군자료 를 기반으로 기준이 되는 표면을 생성하였다 . 기준 표 면은 딜로니 삼각분할을 적용하여 계산되고 , 3차원 점 군자료에 투영되어 아래 식을 통해 체적을 산정하게 된 다 (Arango and Morales, 2015).
V
i= L
i* W
i* H
i(1) 여기서 , L
i는 셀의 길이 , W
i는 셀의 너비 , H
i는 셀의 높 이이며 , 셀의 길이와 너비는 GSD와 같다.
H
i= Z
Ti– Z
Bi(2) 여기서 , Z
Ti는 셀 중앙에 있는 각 셀의 지형 고도 , Z
Bi는
Table 6. Relationship between mapping scale, aerial imagescale, and GSD
Scale Aerial image scale GSD (cm)
1/500~1/600 1/3,000 ~ 1/4,000 8
1/1,000~1/1,200 1/5,000 ~ 1/8,000 12 1/2,500~1/3,000 1/10,000 ~ 1/15,000 25
1/5,000 1/18,000 ~ 1/20,000 42
1/10,000 1/25,000 ~ 1/30,000 65
1/25,000 1/37,500 80
Table 7. Residual of position accuracy for aerial photogrammetry
Scale Standard deviation
(m) Maximum value
(m)
1/500~1/600 0.14 0.28
1/1,000~1/1,200 0.20 0.40
1/2,500~1/3,000 0.36 0.72
1/5,000 0.72 1.44
1/10,000 0.90 1.80
1/25,000 1.00 2.00
Table 8. Residuals at CPs position in RMSE
Point 3D flight drone mapping RTK drone mapping
dxy (m) dz (m) dxy (m) dz (m)
1 0.044 0.031 0.042 0.204
2 0.054 0.023 0.024 0.016
3 0.024 0.022 0.008 0.030
4 0.019 0.056 0.039 0.217
5 0.029 0.066 0.010 0.214
RMSE 0.034 0.040 0.025 0.136
셀 중앙에 있는 각 셀의 기본 고도이다 .
그러므로, 셀 i의 체적 V
i는 다음과 같이 지정된다.
V
i= GSD * GSD * (Z
Ti– Z
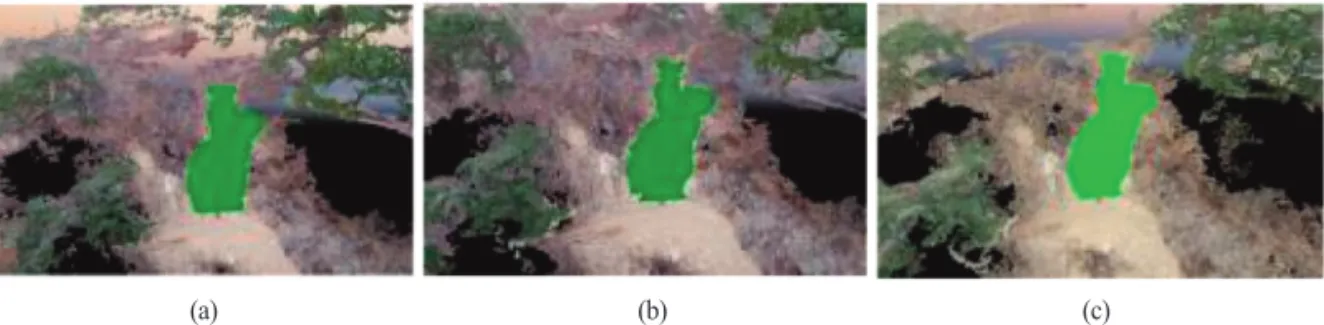
Bi) (3) 위의 수식을 통해 normal drone mapping, 3D flight drone mapping, RTK drone mapping의 3차원 점군자료 를 활용한 산사태 지역의 체적을 계산하였다 . Fig. 11은 각 점군자료 위에 기준 표면을 중첩한 모습을 나타내고 있으며 , 기준면을 기반으로 산사태가 발생한 지역의 물 량을 산출하였다 . Table 9는 각각의 산사태 현장의 체적 을 나타낸다. RTK drone mapping이 3D flight drone mapping 보다 더 근사한 수치를 나타냈지만 세 가지 방 법의 체적 산출결과 , 모두 유사한 체적 산출결과를 나 타냈다 .
4. 결론
본 연구는 자연재해로 인한 피해조사 시 드론을 활용 할 경우 , 산림이 많이 분포하고 있는 지역에 대한 드론 의 활용방안을 모색하고자 normal drone mapping, 3D flight drone mapping, RTK drone mapping 방법을 통해 드 론 맵핑을 수행하였으며 , 세 가지 방법 모두 평면 위치 오차 2 cm, 표고오차 13 cm 이내의 정확도를 나타냈다.
이를 기반으로 산사태 체적 산정 결과 , 86.42%(3D flight
drone mapping), 95.73%(RTK drone mapping)의 정확도 결과를 보여주었다 . 지상기준점을 활용한 드론 맵핑은 지상기준점을 통해 정밀한 위치 값을 가지지만 험준한 산악지형으로 인한 통신단절 , 비가시권 비행, 경사지 역의 다수 비행, 지상기준점 설치 등에 문제점을 초래 한다. 하지만 3차원 지형정보에 의해 일정한 고도를 유 지하며 비행할 경우 , 드론 기체의 가시권 비행과 고도 별 비행계획을 수립하지 않아도 되는 장점이 있으므로 고도 차이가 심한 산악지형에서의 피해조사에 적용하 는 것이 유리할 것으로 판단된다 . 또한 RTK 드론을 활 용할 경우 , 재난피해지역의 특성상 지상기준점 설치가 어려운 문제를 해결할 수 있을 것으로 판단되고 광범위 한 재난피해 지역을 조사할 시 시간 및 인력 낭비를 줄 일 수 있을 것으로 사료된다. 따라서 산림에서 발생한 재난현장 맵핑의 경우 3가지의 방법을 적절하게 사용 한다면 효과적인 재난피해조사를 수행할 수 있을 것으 로 기대된다 .
다만 , 본 연구지역의 산사태 현장은 지상기준점이 근 거리에 위치하기 때문에 정확도를 확보할 수 있었지만 , 발생지역에 지상기준점 배치가 어려운 재난현장에서 는 정확도가 낮아지므로 향후 direct geo-referencing를 통한 추가적인 연구가 필요하다고 판단된다.
(a) (b) (c)
Fig. 11. Landslide volume calculation results : (a) normal drone mapping, (b) 3D flight drone mapping and (c) RTK drone mapping.
Table 9. Comparison landslide volume
Flight Measured volume (%) Volume difference (%)
Normal drone mapping (reference) 153.78 m
33D flight drone mapping 132.90 m
3(86.42%) -20.88 m
3(-13.58%)
RTK drone mapping 147.22 m
3(95.73%) -6.56 m
3(-4.27%)
사사