JKSCI
Improvement of location positioning using KNN, Local Map Classification and Bayes Filter for indoor location recognition system
1)
Seung-Hoon Oh*, Ju-Hyun Maeng**
*Graduate, Dept. of Computer Science, Korea University, Seoul, Korea
**Ph.D candidate, Dept. of Software Engineering, Hanyang University, Seoul, Korea
[Abstract]
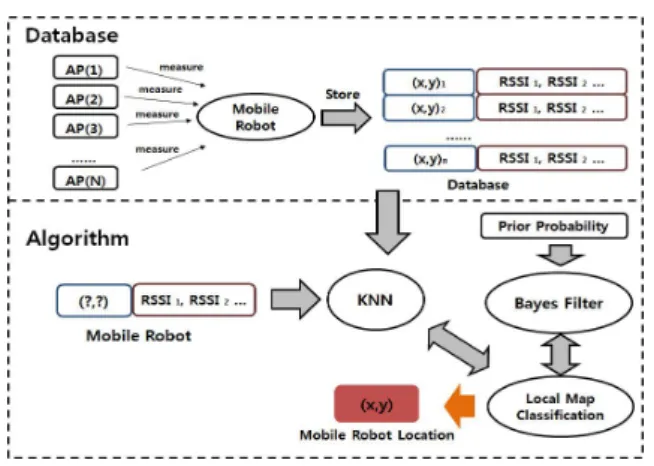
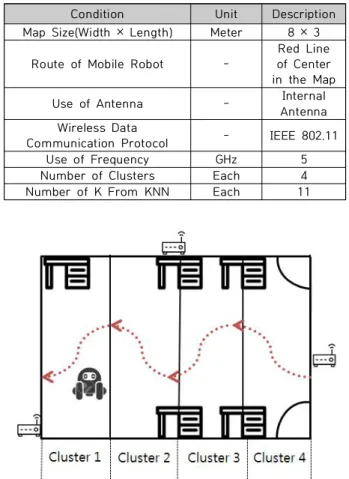
In this paper, we propose a method that combines KNN(K-Nearest Neighbor), Local Map Classification and Bayes Filter as a way to increase the accuracy of location positioning. First, in this technique, Local Map Classification divides the actual map into several clusters, and then classifies the clusters by KNN. And posterior probability is calculated through the probability of each cluster acquired by Bayes Filter. With this posterior probability, the cluster where the robot is located is searched. For performance evaluation, the results of location positioning obtained by applying KNN, Local Map Classification, and Bayes Filter were analyzed. As a result of the analysis, it was confirmed that even if the RSSI signal changes, the location information is fixed to one cluster, and the accuracy of location positioning increases.
▸Key words: Positioning, KNN, K-Mean, Bayes Filter, Mobile Robot
[요 약]
본 논문에서는 위치 측위의 정확도를 높일 수 있는 방안으로 KNN(K-Nearest Neighbor)과 Local Map Classification 및 Bayes Filter를 융합한 기법을 제안한다. 먼저 이 기법은 Local Map Classification이 실제 지도를 여러 개의 Cluster로 나누고, 다음으로 KNN으로 Cluster들을 분류한다.
그리고 Bayes Filter가 획득한 각 Cluster의 확률을 통하여 Posterior Probability을 계산한다. 이 Posterior Probability으로 로봇이 위치한 Cluster를 검색한다. 성능 평가를 위하여 KNN과 Local Map Classification 및 Bayes Filter을 적용하여서 얻은 위치 측위의 결과를 분석하였다. 분석 결과로 RSSI 신호가 변하더라도 위치 정보는 한 Cluster에 고정되면서 위치 측위의 정확도가 높아진다는 사실을 확인하였다.
▸주제어: 위치 측위, KNN, K-Mean, 베이지안 필터, 모바일 로봇
∙First Author: Seung-Hoon Oh, Corresponding Author: Seung-Hoon Oh
*Seung-Hoon Oh ([email protected]), Dept. of Computer Science, Korea University, **Ju-Hyun Maeng ([email protected]), Dept. of Software Engineering, Hanyang University
∙Received: 2021. 02. 18, Revised: 2021. 05. 25, Accepted: 2021. 05. 31.
Copyright ⓒ 2021 The Korea Society of Computer and Information http://www.ksci.re.kr pISSN:1598-849X | eISSN:2383-9945