현지 측량기준점을 이용한 LiDAR 데이터의 정확도 검증 Evaluation of Airborne LiDAR Data using Field Surveyed
Ground Control Points
위광재* ・ 양인태** ・ 서용운*** ・ 심정민****
Wie, Gwang Jae ・ Yang, In Tae ・ Suh, Young Woon ・ Sim, Jung Min
要 旨
본 논문은 항공LiDAR데이터의 정확도를 수평과 수직으로 구분하여 현지의 측량기준점을 이용하여 평가하였다. 항공LiDAR측량은 좌우 스캔방식에 의한 레이저 포인트를 취득하므로 미리 측량된 점과 정확히 일치하는 포인트, 를 획득하기가 어렵다 따라서 본 연구에서는 현지 측량점 주변에 위치한 점들을 종합적으로 이용하여 비교 평가를. , 실시하였다 수평위치의 정확도는. LiDAR포인트로부터 각 건물면에 대한 평면방정식을 구성하여 모서리 점에 대한 좌표를 산출하여 현지 측량점과 비교한 결과 평균오차, 19cm, RMSE 21cm로 나타났으며, 16점 중에서15점이20cm 이내의 오차를 보였다 수직위치의 정확도는 총. 41점에 대해 현지에서 측량한 검사점의 높이값을 이용하여 수직위치 를 평가한 결과 평균오차, 10cm, RMSE 14cm로 나타났으며 총 검사점의, 75%가15cm이내로 오차를 보였다 따라. 서 본 연구 결과를 바탕으로 향후 수치지형도 수정 ․ 갱신 기본지리정보 및 삼차원공간정보 구축 등, LiDAR데이터 의 정확도에 따른 활용범위를 산정할 수 있을 것으로 판단된다.
핵심용어: 라이다 항공레이저측량 레이저 스캐닝 정확도 지상기준점 표준편차, , , , , Abstract
In this paper, airborne LiDAR data were evaluated in horizontal and vertical accuracy. By using zigzag scanning type of LiDAR, GCPs are not tested directly. So points around GCPs were used in this evaluation. Building corner points were made from LiDAR’s building planar and compared with ground surveyed GCPs, in horizontal accuracy test. Its accuracy shows 19cm average and 21cm RMSE and 15 points were within 20cm among 16 points. In vertical accuracy test, 41 GCPs were used and it shows 11cm average and 14cm RMSE and 75% of GCPs were within 15cm. This could be a criterion in topographic map modification and basic geographic DB and 3D data construction using airborne LiDAR data.
Keywords : LiDAR, Airborne Laser Surveying, Laser Scanning, Accuracy, Ground Control Point, Root Mean Square Error
서 론
1.
도시화와 산업화가 가속화되고 국토개발이 빠르게 진 행됨에 따라 지표면과 지형지물도 급속하게 변화고 있으 며 이에 대응할 수 있는 신뢰성 높은 공간 데이터의 신, 속한 획득과 처리의 필요성이 증가되고 있다 이동천 등( , 따라서 현실세계에 대한 삼차원 공간정보에 대한 2005).
요구가 증대되면서 다양한 취득시스템이 개발되고 있다 유환희 등 항공사진 위성영상과 같이 간접적인 ( , 2005). ,
방법과 위성측위시스템(GPS), 토탈스테이션 등 직접적 인 방법이 있으나 최근에는 이러한 방법들을 융합하여, 동시에 취득하는 항공LiDAR시스템이 개발되어 전 세 계적으로 광범위하게 활용되고 있다 조우석 등( 2003).
와 는 도시환경에서의 건물과 수목 Haala Brenner(1999)
의 추출을 위하여 다중 분광영상과LiDAR자료를 융합 하는 연구를 수행하였으며, Mass와Vosselman(1999)은 정규격자를 보간하는 방법을 사용하지 않고LiDAR 점 자료의 사용하여 건물 경계선을 결정하는 방법을 제안
년 월 일 접수 년 월 일 채택
2006 8 21 , 2006 9 28
* 정회원 성균관대학교 건설환경시스템공학과 박사과정 수료 한진정보통신・ ・ GIS사업부문 ([email protected])
** 정회원 강원대학교 토목환경공학과 교수・ ([email protected])
*** 정회원 포항 대학 토목도시과 교수・ 1 ([email protected])
**** 정회원 전주비전대학 지적부동산학과 교수 ([email protected])・ 연구논문
하였다 국내에서도 정동기 등. (2005)은 필터링 기법을 이 용한LiDAR자료로부터DTM추출에 대한 연구를 수행 하여 필터링 기법의 특성을 분석하였다 최윤수 등. (2002) 은 항공사진측량에 의한 도화원도를 기준으로LiDAR데 이터의 평면 정확도를 평가하였다 또한 이동천 등. (2005) 은LiDAR자료를 이용한 수치지형도의 건물과 등고선 제 작 가능성을 연구하였다.
현재 국토지리정보원에서 구축하고 있는 다차원공간 정보는 현실세계의 공간정보를 컴퓨터에 적절히 표현할 수 있는 데이터이며 그 중에서, LiDAR데이터는 수치지 형도 수정 ․ 갱신, 3D건물 모델링 홍수 및 재해관리 건, , 설 및SOC분야 환경 및 모니터링 가상현실분야 등 사회, , 각 분야에 필수적으로 활용하는 공간정보이다 따라서. 본 연구에서는 이러한 활용가치가 풍부한LiDAR데이터 에 대하여 연구지역을 선정하여 수평과 수직으로 구분하 여 정량적으로 위치 정확도를 검증하고자 한다.
본 연구는LiDAR데이터의 정확도를 수평과 수직으로 구분하여 정량적으로 평가하기 위하여 국토지리정보원 에서 수행한 다차원공간정보 구축사업의 현지 측량점의 성과를 활용하였다 현지 측량점은 수평위치를 평가하기. 위해서는 비교적 넓고 평평한 층 이상 건물의 옥상부분5 을 선정하였으며 수직위치는 도로노면을 중심으로, 31점 을 선정하여 연구지역에 골고루 배치하였다, .
측량 2. LiDAR
원리 2.1 LiDAR
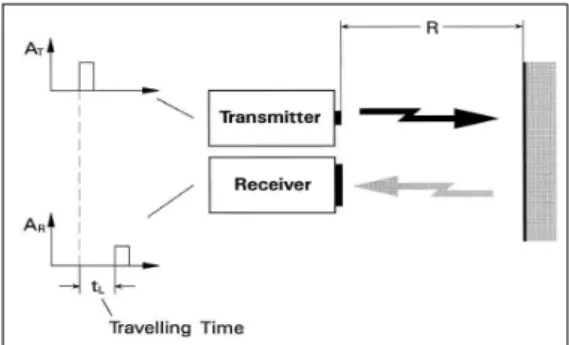
항공레이저측량은 매우 작은 순간 시야각IFOV(Instan- 을 가진 강력한 레이저를 발사하 taneous Field of View)
여 지상에서 반사되는 레이저가 스캐너에 도달할 때까지 의 시간()을 관측하고 그 값에 빛의 속도를 곱하여 거, 리()를 계산하여 정밀한 표고 관측을 한다(A. Wehr., U 그림 은 레이저 거리측정의 원리를 개념적 Lohr., 1999). 1
으로 도시한 것이다.
레이저를 이용한 거리의 관측에는 크게 도달시간을 관 측하는 펄스(pulse)를 이용한 방법과 위상차(phase shift) 를 이용하는 방법이 있다 위상차를 이용하는 방법에서. 는 연속적으로 발사되는 레이저 광선 CW(Continuous 를 이용하여 발사된 위상과 반사된 위상의 차를 관 Wave)
측하여 거리를 계산한다 현재 사용되고 있는 대부분의. 항공레이저측량 장비에서는 펄스 레이저를 사용한다 펄. 스를 사용하는 경우 거리를 관측하는 가장 일반적인 방, 법으로 레이저 펄스의 왕복시간을 관측하여 광속을 곱한 값으로서 펄스가 방사되고 수신되는 사이의 시간을 이,
용하는 것이다 레이저 펄스의 왕복시간. ()은 아래의 식 (1)과 같다.
(1)
여기서, R : 거리관측부와 지표면 위치 간의 거리, c : 빛의 속도
식(1)에서 거리와 시간에 대한 각각의 오차관계는 거 리오차∆은 시간오차∆에 정비례하며 다음과 같이, 유도된다.
∆
∆ (2)
여기서, ∆ : 거리 오차
∆ : 시간 관측 오차
따라서 거리관측부와 지표면 위치 간의 최대 거리는, 다음과 같다.
(3)
이때 거리의 정확도는 펄스의 생성시간, (Generation Time), 비율 관측 비율 등에 의해 결정된다
S/N , (E.P. Baltsavias., A. Wehr., U Lohr., 1999).
측량방법 2.2
시스템은 그림 와 같이 와 레이저 LiDAR 2 GPS, IMU
측정 장비로 구성이 되어 있으며 레이저 측정 장비는 레, 이저를 발사하고 수신하는 스캐너와 거리측정부로 구성 이 되어 진다 레이저 스캐너는 항공기가 측량하는 동안. 지상 연직방향을 향하여 스캔하도록 항공기에 고정되어 있으며 항공기의 삼차원 회전각, (roll, pitch, yaw)의 불규
그림 1. The Principle of Laser Ranging ( : Launched Time, : Received Time)
칙적인 변화로 인해 레이저가 지상의 연직방향을 스캔하 지 못하는 경우가 발생하기도 한다 이러한 불규칙적인. 항공기의 회전각 자료는IMU장비에 의해 보정이 가능 하다 또한 항공기에 부착된. GPS는 레이저 측량을 하는 동안 지상에 설치된 GPS 기준국 데이터를 이용하여 기법에 의하여 후처리함으로써 수 의 정확도를
DGPS cm
확보 할 수 있다.
와 레이저 스캐너간의 위치관계와 와 레이저
GPS INS
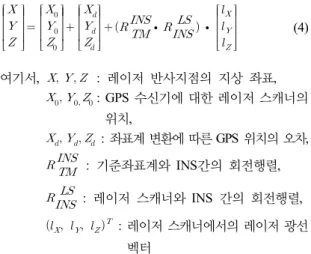
스캐너간의 회전각 관계를 알고 있을 때 정밀하게 관측, 된 거리를 이용하여 기준좌표계에 대한 지표면의 좌표는 식(4)을 이용하여 계산할 수 있다.
∙
∙
(4)
여기서, : 레이저 반사지점의 지상 좌표,
: GPS수신기에 대한 레이저 스캐너의 위치,
:좌표계 변환에 따른GPS위치의 오차,
: 기준좌표계와 INS간의 회전행렬,
: 레이저 스캐너와INS 간의 회전행렬,
:레이저 스캐너에서의 레이저 광선 벡터
이와 같이 지상에서 반사된 레이저의 좌표를 계산하기 위해서는LiDAR시스템을 구성하는 각 장비의 상호 위 치 및 회전각관계가 규명되어야 하고 이러한 시스템 변, 수들은 흔히 센서검정(sensor calibration)과정을 거쳐 파 악된다 센서검정은 운동장과 같은 평지나 대형건물과.
같은 기준 지역의 상공을 여러 방향에서 비행하여 관측 한 자료를 이용하여 수행된다 그러나 이러한 검정에 대. 해서는 표준화된 공정이 없으며 현재까지 장비제조업체, 에서 각각 독자적인 작업방법에 의해 검정을 수행한다.
실험 데이터 취득 3.
연구지역 선정 3.1
본 연구는LiDAR 데이터의 수평과 수직위치를 현지 측량된 검사점을 기준으로 정량적으로 평가하는데 의의 가 있다 따라서 수평과 수직위치 특성상 연구지역을 구. 분하였으며 수평위치의 정확도 평가를 위하여 층 건물, 5 을 선정하였다 수직위치는 넓고 평평한 도로노면 등을. 선정하되 연구지역에 골고루 분포되게 선정하였다.
데이터 취득 3.2
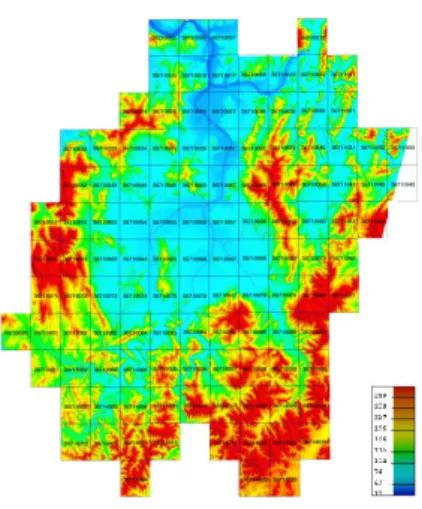
실험 데이터의 취득은 작업의 효율성 항공기 운영 지, , 상GPS기준국 설치 등을 고려하여 그림 에서 볼 수 있3 듯이 전체 실험지역을 개 구역으로 나누어서 취득하였8 다 데이터를 취득함에 있어서 원시. LiDAR포인트의 지상 밀도 해상도 가 가장 중요한 요소이기 때문에 본 연구에서( ) 는 일반적으로1m수치표고모형(DEM)을 제작하기 위하 여 획득하는LiDAR포인트 자료의 밀도는1m2당5 6~ 점 정도가 되도록 하였으며 그 결과는 그림 와 같다, 4 .
실험지역에 대한LiDAR 측량은 2005년 월2 ~4월간 총13회의 비행으로137개 스트립에서 약234GB의 항공 레이저 데이터를 취득하였다 항공기 운항과 데이터 취득. 에 양호한 기상 및GPS환경 조건에서 이루어졌으며 센서,
그림 3. Strip of LiDAR Data 그림2. Construction of Airborne Laser Scanner System
탑재에 이용된 항공기는 Cessna 208로서 한진정보통신 주 이 보유하고 있는 항공사진촬영용 경비행기이다
( ) .
현지 측량 3.3
항공LiDAR측량을 통하여 실험지역에 취득된 고정밀 포인트 데이터의 정확도를 평가하기 위하여 앞서 제시하 였듯이 수평과 수직위치 평가를 구분하여 수행하였다.
본 연구에서는 주변과 확연히 구분되는 일정 높이를 가 지는OO대학교 내의 공학관 건물을 선정하였으며 아래, 그림 와 같이 모서리 점과 외곽선을 옥상위에 설치한5 기준점에 근거하여 토탈스텐이션(Total-Station)으로 측 량을 수행하였다.
또한 수직위치 평가를 위한 현지의 측량기준점은 그림 과 같이 연구지역에 골고루 분포되게 하였으며 수
6 , GPS
신이 양호하며 직접수준측량이 비교적 수월하고 안정적, 인 지점인 도로 주변을 대상으로31점을 선정하여 측량 하였다 현지의 측량기준점에 대한 측량은 삼각점 점을. 2 선정하여 기준국으로 이용하였고 측량하는 동안 연속관, 측을 실시하였으며 이동국인 현지 검사점은 약, 50 60∼ 분씩 수신하였다 또한 수직위치 평가를 수행하기 위하. 여 수준점을 기준으로 직접수준측량을 수행하여 정표고 를 결정하였다.
정확도 평가 4.
수평위치 4.1
데이터의 수평위치를 평가하기 위하여 그림
LiDAR 5
와 같이 건물의 모서리 점에 대하여GPS와 토탈스테이 션을 이용하여 현지측량을 실시하여 기준점으 좌표를 산
출하였다 또한. LiDAR데이터를 이용하여 평면의 방정 식을 구성한 후에 각 모서리 점에 대한 교차점의 평면좌 표를 추출하였다.
수평위치 평가를 위한 현지 측량된 건물의 외곽선 추출 은 그림 과 같이7 LiDAR데이터를 건물(buliding)과 지 면(ground) 데이터 등으로 구분하여 실시하였다.
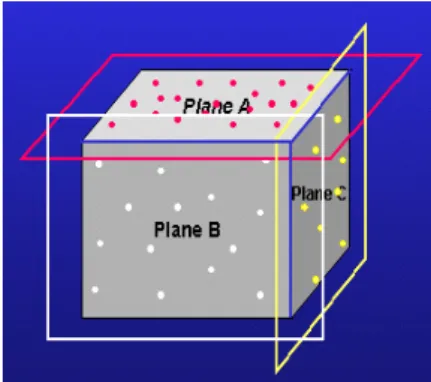
건물 각 면에 대한 평면방정식을 구성하기 위하여 건물 의 각 벽면에서 반사된LiDAR데이터만을 이용하였다. 건물 지붕면과 옆면 앞면 등에서 반사된, LiDAR포인트 를 가지고 그림 과 같은 방법으로 모서리 점의 좌표를8 추출하기 위한 평면방정식을 구성하였다 그림 와 같이. 9 구성된 건물 각 벽면의 평면 방정식은 식(5)와 같으며, 평면을 구성하고 있는 점의 개수가 개 라면 평면의 방n , 정식은 식(6)과 같은 행렬로 나타낼 수 있다.
(5)
그림 4. LiDAR Data
그림5. GCPs for Accuracy Evaluation of Horizontal Posi- tioning Accuracy
그림6. GCPs for Accuracy Evaluation of Vertical Positioning Accuracy
(6)식(6)에서 D 가“0”이 되는 조건은 평면이 좌표의 원 점을 지나는 경우에 해당한다 실제로 우리가 사용하는. 좌표는 원점을 지나가는 평면이 없다고 가정을 하면
TM ,
식(6)의 양변을 상수 D 로 나눌 수 있다 따라서 식. (6) 의 양변을 D 로 나누고 상수행렬을 이항시킨 뒤 간략하, , 게 정리하면 식(7)과 같은 행렬식으로 나타낼 수 있다.
(7)
식(7)의 관측방정식을 이용하여 최소제곱법을 수행하 면 식(8)과 같다.
(8)
각 면의LiDAR데이터를 이용하여 평면방정식의 계수 들에 대한 해를 구하고, 3개의 평면 방정식을 이용하여 건물 모서리 절점의 좌표를 구한다 건물을 구성하고 있. 는 개의 평면을3 A, B, C라 하면 공면조건식은 식(9)와 같으며 이와 같은 최소제곱법 행렬식을 이용하여 건물, 모서리 점의 좌표X, Y, Z의 해를 구하였다.
(9)
각 면의 평면방정식을 구성하기 위하여 표 과 같이 각1 면에 존재하는LiDAR포인트를 추출하여 사용하였곡 평 면 정확도를 평가위한 건물 각면에 대한 정보는 그림 와9 같다.
이와 같은 방법으로 수평위치 평가를 위한 건물의 모서 리 점의 좌표를 그림10과 같이 산출하였다 평면방정식. 그림7. Classification of Building & Ground
그림8. Determination of Planar Surfaces
그림9. each plane of building
표1. LIDAR Point used for planar equation(unit : m)
면 포인트 수
A 1,510
B 101
C 231
D 207
E 517
F 236
G 379
H 164
그림10. Corner Points Extracted by Determination of Planar Surfaces
에 의하여LiDAR 포인트로부터 산출된 건물의 모서리 점을GPS와 토탈스테이션을 이용하여 측량된16점의 좌 표를 기준으로 비교한 결과는 표 와 같다2 .
표 에서 보는 것과 같이 총 점의 현지 측량점과2 16 데이터에서 평면방정식으로 추출한 건물 외곽선 LiDAR
과의 평균 차이는 19cm,표준편차는21cm로 나타났다. 또한 그림11과 같이 거리 차이의 분포에서는15 20cm~ 의 분포대가 가장 많은 걸로 나타났다.
수직위치 평가 4.2
항공LiDAR데이터는 이동중인 항공기에서 좌우 스캐 닝 형식으로 지상에 쏘아진 레이저가 반사되어져 오는 시간을 이용하여 지상에서 반사지점의 삼차원 좌표를 얻 고 있기 때문에 지상의 특정지점에 대한 좌표를 산출하 는 것은 대단히 어렵다 따라서 본 연구에서는 현지에서. 측량한 점과 같은 특정지점의 높이값 비교를 위해서는 주변에 분포된 레이저 포인트 결과 값들을 통해 불규칙 삼각망(TIN)을 그림12와 같이 형성하고 현지 측량점의, 높이값과 불규칙삼각망(TIN)형성면과의 높이 차이을 구 하였다.
그림 11. Error Distribution of Horizontal Position
표 2. Evaluation of differences between Field Surveying data and LiDAR data in Building Corner Points(unit : m)
No. 현지 측량 기준점 좌표 LiDAR에 의한 대응점 좌표 오차
RMSE(m)
X1 Y1 X2 Y2 X Y 평면위치오차
1 231014.0802 318560.0662 231014.1920 318560.2286 -0.1118 -0.1624 0.1972 0.038873 3 231007.5952 318507.4215 231007.7089 318507.2369 -0.1137 0.1846 0.2168 0.047005 4 231017.2276 318492.5866 231017.3350 318492.7228 -0.1074 -0.1362 0.1735 0.030085 8 231131.9617 318478.5088 231131.9075 318478.6533 0.0542 -0.1445 0.1543 0.023818 9 231144.9203 318490.9215 231144.9439 318490.7255 -0.0236 0.1960 0.1974 0.038973 11 231150.9731 318540.3173 231151.0039 318540.2588 -0.0308 0.0585 0.0661 0.004371 12 231144.9037 318540.9835 231144.8584 318541.0106 0.0453 -0.0271 0.0528 0.002787 13 231146.8277 318556.4849 231146.7401 318556.3913 0.0876 0.0936 0.1282 0.016435 14 231141.5914 318557.1336 231141.4702 318557.0361 0.1212 0.0975 0.1555 0.024196 15 231135.4516 318560.9134 231135.6297 318560.9151 -0.1781 -0.0017 0.1781 0.031722 17 231033.7599 318573.3809 231033.6671 318573.3893 0.0928 -0.0084 0.0932 0.008682 18 231026.9015 318571.2339 231027.0146 318571.1009 -0.1131 0.1330 0.1746 0.030481 19 231025.3310 318555.2912 231025.2000 318555.1000 0.1310 0.1912 0.2318 0.053718 20 231019.4795 318507.8881 231019.3200 318507.8100 0.1595 0.0781 0.1776 0.031540 21 231133.4605 318493.8880 231133.0000 318493.8700 0.4605 0.0180 0.4609 0.212384 22 231139.2674 318541.3027 231138.9200 318541.2300 0.3474 0.0727 0.3549 0.125972
거리오차 평균 0.19
RMSE 0.21
그림12. Construction of GCPs
비교대상이 되는 주변의LiDAR포인트들은 이미 지형 으로 분류가 이루어진 점들을 대상으로 하였다
(ground) .
촬영 여건에 따라 대상지역을 몇 개의 블록 단위로 나누 어 촬영을 실시하였으므로 각각의 측량일자별로 수직위, 치의 정확도를 평가하여 이를 통해 수직위치의 정확도를 평가하였다.
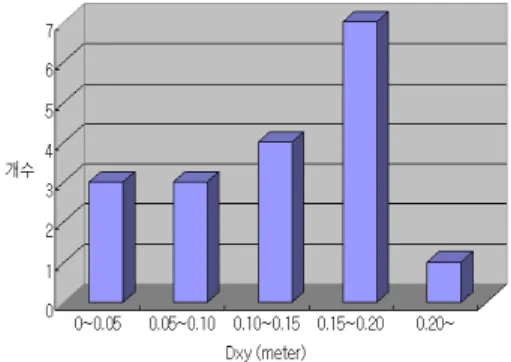
개의 현지 측량기준점과 비교한 결과가 그림 과 같
31 13
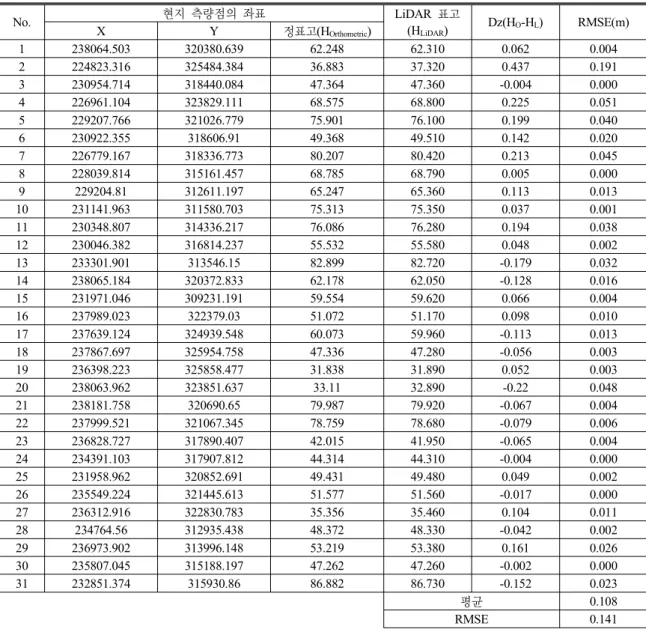
이 차이가15cm이내에 속하는 점이75%였으며, LiDAR 데이터의 현지측량값과의 차이는 평균0.11m, RMSE는 로 나타났다 표 은 개의 현지 측량점에 대한 0.14m . 3 31
기준점의 좌표와 오차를 나타낸 것이다.
표3. Evaluation of GCPs and LiDAR Height(unit : m)
No. 현지 측량점의 좌표 LiDAR 표고
(HLiDAR) Dz(HO-HL) RMSE(m)
X Y 정표고(HOrthometric)
1 238064.503 320380.639 62.248 62.310 0.062 0.004
2 224823.316 325484.384 36.883 37.320 0.437 0.191
3 230954.714 318440.084 47.364 47.360 -0.004 0.000
4 226961.104 323829.111 68.575 68.800 0.225 0.051
5 229207.766 321026.779 75.901 76.100 0.199 0.040
6 230922.355 318606.91 49.368 49.510 0.142 0.020
7 226779.167 318336.773 80.207 80.420 0.213 0.045
8 228039.814 315161.457 68.785 68.790 0.005 0.000
9 229204.81 312611.197 65.247 65.360 0.113 0.013
10 231141.963 311580.703 75.313 75.350 0.037 0.001
11 230348.807 314336.217 76.086 76.280 0.194 0.038
12 230046.382 316814.237 55.532 55.580 0.048 0.002
13 233301.901 313546.15 82.899 82.720 -0.179 0.032
14 238065.184 320372.833 62.178 62.050 -0.128 0.016
15 231971.046 309231.191 59.554 59.620 0.066 0.004
16 237989.023 322379.03 51.072 51.170 0.098 0.010
17 237639.124 324939.548 60.073 59.960 -0.113 0.013
18 237867.697 325954.758 47.336 47.280 -0.056 0.003
19 236398.223 325858.477 31.838 31.890 0.052 0.003
20 238063.962 323851.637 33.11 32.890 -0.22 0.048
21 238181.758 320690.65 79.987 79.920 -0.067 0.004
22 237999.521 321067.345 78.759 78.680 -0.079 0.006
23 236828.727 317890.407 42.015 41.950 -0.065 0.004
24 234391.103 317907.812 44.314 44.310 -0.004 0.000
25 231958.962 320852.691 49.431 49.480 0.049 0.002
26 235549.224 321445.613 51.577 51.560 -0.017 0.000
27 236312.916 322830.783 35.356 35.460 0.104 0.011
28 234764.56 312935.438 48.372 48.330 -0.042 0.002
29 236973.902 313996.148 53.219 53.380 0.161 0.026
30 235807.045 315188.197 47.262 47.260 -0.002 0.000
31 232851.374 315930.86 86.882 86.730 -0.152 0.023
평균 0.108
RMSE 0.141
그림13. Error Distribution of Vertical Position
결 론 5.
항공LiDAR데이터의 수평위치의 정확도를 평가하하 기 위하여 현지 측량기준점은 주변환경과 확연히 구분이 되는 건물을 선정하여 건물의 모서리, 16점에 대하여 현 지 측량을 실시하였다 또한 수직위치를 평가. 하기 위하 여 총31점의 현지측량 기준점을 선정하였다 이로부터. 다음과 같은 결과를 얻을 수 있었다.
첫째 항공, LiDAR 데이터의 수평위치에 대한 정확도 는 현지 측량기준점을 기준으로 하여 평균0.19m, RMSE 는0.21m의 결과를 얻었다 또한 수직위치 정확도는 평. 균0.11m, RMSE는0.14m로 나타났다.
둘째 본 연구 결과를 통하여 국토지리정보원에서 수행, 하고 있는 다차원공간정보구축 사업의 성과품인LiDAR 데이터의 정확도를 현지 측량값으로 정확히 규명함으로 써 국내 사용자들이 수치지형도 수정 ․ 갱신 건물, 3D모델 링 등 다양한 분야에 활용할 수 있는 기준을 제공하였다. 셋째 수치지형도의 한계로 지적되고 있는 지물들에의, 높이값 산출에 항공LiDAR측량 기술이 효과적으로 사 용될 것으로 기대되며 특히 수치지형도와 함께 이용될, 경우 높은 정확도와 빠른 결과를 산출할 수 있어 도시지 역의 건물에 대한 차원 모델링 제작에 효과적으로 사용3 될 것으로 기대된다.
참고문헌
건설교통부 국토지리정보원
1. , 2005.9,다차원공간정보 구축사업
사업결과보고서 및 요약보고서 송연경
2. , 2004,Direct Georeferencing에 의한LiDAR자료와 영상의 융합과 적용기법
CCD ,동아대학교 박사학위 논문
손홍규 윤공현 김기홍 송영선 컬러항공영상에서 그림자영역
3. , , , ,
의 추출,대한토목학회 논문집, Vol. 25 No. 2D, pp. 341-345
유환희 김성삼 정동기 홍재민 자료를 이용한
4. , , , , 2005, LiDAR
생성 정확도 평가
DTM ,한국측량학회지 제 권 제 호, 23 3 , pp.
261-272
이동천 위광재 김덕인 김승용 항공 데이터를 이
5. , , , , 2003, LiDAR
용한 건물추출 및 정확도 평가,대한토목학회 정기 학술대회 논 문집, pp. 4371-4376
이동천 염재홍 데이터를 이용한 수치지도의 건물
6. , , 2005, LiDAR
및 등고선 레이어 생성, 한국측량학회지 제 권 제 호, 23 3 , pp.
313-322
조우석 이영진 좌윤석 항공사진과 항공레이저 데이터를
7. , , , 2003,
이용한 건물 추출, 대한원격탐사학회지, Vol. 19 NO. 4, pp.
307-317
최윤수 한상득 위광재 도화원도를 이용한 데이터
8. , , , 2002, LiDAR
의 정확도 평가 연구, 한국측량학회지, Vol. 20 No. 2, pp.
127-136
9. David F. Maune, 2001,Digital Elevation Model Technologies and Applications; The DEM User Manual, American Society for Photogrammetry and Remote Sensing
10. E.P. Baltsavias, 1999, Airborne laser scanning : basic relations and formulas, ISPRS Journal of Photogrammetry & Remote Sensing, Vol. 54 (1999), pp. 199-214
11. Haala, N. and C. Brenner, 1999, Extraction of buildings and trees in urban environments, ISPRS Journal of Photogra- mmetry & Remote Sensing, Vol. 54(1999) : 130-137.
12. Maas, Hans-Gerd and G. Vosselman, 1999. Two algorithms for extracting building models from raw laser altimetry data, ISPRS Journal of Photogrammetry & Remote Sensing, 54:
153-
13. Wehr, A., Lohr, U., 1999. Airborne laser scanning - an introduction and overview.ISPRS Photogrammetry & Remote Sensing, Vol 54(NOS. 2-3), pp. 68-82, 1999.