1. 서론
오늘날의 다양한 첨단 무기체계 가운데 가장 주목할 만한 것은 무인 전투체계이다. 전투체계의 무인화는 과학 기술의 발전과 전쟁수행 형태의 변화에 따라 선진국을 중심으로 유인 무기체계를 대체 또는 보완하는 형태로 발전 중이다. 이는 미래전의 양상이 인명 중시 사상을 바 탕으로 대량 살상과 파괴를 지양하고 비대칭
․
저비용 전 력으로 군사력 우위 유지 및 전쟁억지력을 확보하는 것위험제어 시나리오 기반의 무인잠수정 소나 센서 배열 선정을 위한 시뮬레이터 개발
신명인 ・ 이진호 ・ 홍우영 ・ 김우식 ・ 배호석 ・ 조현진†
A Simulator Development for Determining the Sonar Sensor Configuration of Unmanned Underwater Vehicles Based on a Hold-at-Risk Scenario
Myoungin Shin ・ Jinho Lee ・ Wooyoung Hong ・ Woo Shik Kim ・ Hoseuk Bae· Hyunjin Cho
†ABSTRACT
This study develops a simulator for determining the sonar sensor configuration of unmanned underwater vehicles (UUVs) based on a scenario, in order for UUVs to conduct an effective anti-submarine warfare (ASW).
First, we analyze the missions and operational concepts of UUVs in the field of ASW, and then select a Hold-at- Risk scenario as the one with the highest priority. Next, for modeling the components of a simulator, the motion, acoustic characteristic, and environment condition of the platforms (UUV and target submarine) are specified.
Especially, based on the beam pattern of each sonar configuration considered in this paper, the passive sonar equation is used to verify target detection, and we further estimate the azimuth and elevation of the target using amplitude and phase of the received signal, respectively. The simulation results show the performance tendency depending on the sonar sensor configurations of a UUV, and the simulator provides a high applicability under various scenarios.
Key words : Simulator, UUV, ASW, SONAR sensor configuration
요 약
본 연구에서는 무인잠수정의 효과적인 대잠전 수행을 위해, 시나리오 기반의 무인잠수정 소나 센서 배열 선정을 위한 시뮬 레이터를 개발하였다. 먼저, 대잠전 분야에서 무인잠수정의 임무 및 운용개념을 분석하고, 가장 주요한 임무 중 하나인 위험 제어(Hold at Risk)를 시뮬레이션 시나리오로 선정하였다. 다음으로, 시뮬레이터 구성요소 모델을 위하여, 플랫폼별(무인잠 수정, 표적 잠수함) 운동모델, 음향모델 및 환경모델을 제시하였다. 특히 음향모델에서는 센서 배열에 따른 빔패턴을 기반으 로 수동 소나방정식을 이용하여 탐지여부를 판단하였다. 또한, 표적의 방위 및 고각 추정을 위하여 진폭기반 방위 추정법과 위상 모노펄스 추정기법을 각각 적용하였다. 개발된 시뮬레이터를 통해 센서 배열 변화에 따른 결과의 경향성이 기본적인 빔패턴 이론과 일치하는 것을 보여주며, 다양한 시나리오에 대한 적용 가능성을 시사한다.
주요어 : 시뮬레이터, 무인잠수정, 대잠전, 소나 센서 배열
* 이 연구는 국방과학연구소(UD190001DD)의 지원으로 수행되었습니다.
Received: 14 February 2020, Revised: 19 April 2020, Accepted: 19 April 2020
†Corresponding Author: Hyunjin Cho
E-mail: [email protected]Dept. of Electrical and Electronic Engineering, Naval Academy, Jinhae, Korea
으로 변화하고 있기 때문이다. 즉, 무인화된 전투체계 의 보편적 운용은 미래전 양상의 가장 대표적인 부분이 라 할 수 있다. 우리 해군에서는 무인잠수정(Unmanned Underwater Vehicle, UUV)을 이용한 작전 수행으로 이러 한 목적을 효과적으로 달성할 수 있을 것으로 판단한다. 은밀한 감시정찰 활동, 탐색 및 공격 임무 수행으로 인명 피해를 줄이고, 작전 의도 노출을 최소화하는 등 무인화 전력을 이용하여 작전 목적을 극대화할 수 있는 것이다. 특히, 무인잠수정은 인명피해 감소, 경제적 효율성, 전투 수행개념 및 무기체계 발전추세에 부합하기 위한 측면에 서 그 역할과 필요성이 점점 증대되고 있다(Lee, 2017).
최근 무인잠수정에 관한 국내 연구들을 살펴보면, 공 학/기술적인 관점에서 수행된 무인잠수정 운동모델의 검 증(Lee et al., 2015; Yoo et al., 2016; Kang et al., 2017), 무인잠수정 탑재 소나 센서 개발(Yoo and Kim, 2014) 등의 연구가 수행되었다. 더불어 무인체계의 구체 적인 임무수행 개념을 고려하여 기뢰 탐색 작전에 적합 한 장비 제원과 필요 요구 성능을 결정할 수 있는 교전수 준 M&S (Modeling & Simulation)에 관한 연구도 진행 되었다(Hwang et al., 2011; Hwang et al., 2012). 한편 본 연구는 기존에 연구된 사례가 없는 대잠전 임무 수행 에 관한 교전수준 M&S로 국내외 전문기관의 군사적 운 용 방안을 기초로 현실 충실도가 높은 공학모델을 적용 하여 신뢰성 있는 결과를 얻을 수 있도록 설계되었다.
본 논문에서는 무인잠수정이 대잠정찰 임무를 효과적 으로 수행하기 위한 소나 센서 배열에 관하여 연구를 수 행하였고, 무인잠수정의 대잠정찰 임무 도출과정 및 시뮬 레이터에 적용된 모델과 실험 과정을 소개한다. 무인잠수 정은 기존 유인잠수함에 비해 물리적 공간이 협소하여 탐지장비 탑재가 제한된다. 따라서 소나 센서의 배열에 따른 성능 특징은 무인잠수정 임무 수행에 매우 큰 영향 을 미친다. 한편 부여된 임무가 무엇인지에 따라 소나 센 서 배열이 달리 설계될 수 있다는 점을 고려할 때, 무인 잠수정의 임무 구분 또한 명확히 이루어져야 한다. 따라 서 본 연구에서는 먼저 무인잠수정의 임무를 명확히 설 정하고, 시뮬레이터에 구현되어야 하는 플랫폼(무인잠수 정, 잠수함)들의 운동모델, 음향모델 및 환경모델을 제시 한다. 특히 기존 교전수준 M&S에서 탐지거리와 방위로 서 수신 성능을 표현한 소나 모델과는 달리 음향센서 배 열에 의한 빔패턴 모델을 충실하게 구현하고, 이를 바탕 으로 표적의 방위각과 고각을 추정하는 알고리즘을 반영 하였다.
본 논문의 구성은 다음과 같다. 2장에서는 무인잠수정
의 임무를 분석하고, 가장 주요한 임무를 도출하여 시뮬레 이션을 수행하기 위한 시나리오를 설정하였다. 3장과 4장 에서는 각각 시뮬레이터에 구현된 세부 모델과 시뮬레이 터 사례 분석을 수행하였으며, 5장에서 결론을 제시한다.
2. 무인잠수정 임무 분석 및 시나리오 선정
본 장에서는 무인잠수정이 수행하게 될 임무 중 가장 중요도가 높은 임무를 분석하고 이를 시뮬레이션 시나리 오로 선정한다. 임무 분석을 위하여 미 해군의 무인잠수 정 임무 및 대잠전 분야 운용개념, 국내 연구기관의 대잠 전 분야 운용개념을 참고하였다.
2.1 미 해군의 무인잠수정 임무
미 해군은 2004년 UUV Master Plan(US Navy, 2004) 을 통해 장기적으로 미 해군에 요구되는 무인잠수정의 임무 및 운용개념을 정립하였다. 또한, 이를 바탕으로 2009년 미국 RAND 연구소는 무인잠수정의 임무를 요 약적으로 제시하였으며(Button et al., 2009), 2014년 캐 나다의 OODA Technologies사는 무인잠수정을 통해 수 집하는 정보와 데이터의 통합, 상호운용성에 대한 연구결 과를 발표하였다(Allard & Shahbazian, 2014). 미 해군 의 UUV Master Plan과 RAND 연구소의 무인잠수정 임 무 요약을 비교한 결과는 Table 1과 같다.
미 해군 연구팀은 주요 임무 도출을 위하여 현장조사 (field surveys), 전문가 패널 토의, 워크샵 및 선행연구 분석을 실시하였고, 임무 목록 산출 후에는 임무형태, 혁 신의 정도, 무인잠수정만이 보유할 수 있는 유일성, 기 술발전 요구수준, 다중 적용성 및 해군의 전반적인 중요 성에 대해 고려하여 핵심적인 임무 유형 및 우선순위를 도출하였다. 그 결과 처음에는 총 11개의 주요 임무(정 보/감시/정찰, 대기뢰전, 대잠전, 조사/식별, 해양탐사, 통신/항해 네트워크 노드, 적재물 이송, 정보작전, 적기 신속타격, 장애물 초계 및 우군전력 보호, 해상기지 지 원)를 도출하였으나 이후 무인잠수정 적용의 적합도, 워 크샵 및 팀 분석 등을 통하여 11개의 임무 중 최종적으 로 9개의 핵심 임무를 우선순위 순으로 도출하였고, 그 결과는 Table 1의 좌측과 같다. 추가적으로 9개의 핵심 임무 중 정보/감시/정찰(ISR), 대기뢰전(MCM), 대잠전 (ASW), 조사/식별(ID), 해양탐사(Oceanography) 등 5개 의 임무에 대하여 중요도가 가장 높은 것으로 평가하였 고, 나머지 4개의 임무는 중상 또는 중 수준의 중요도로 평가하였다.
UUV Master Plan (US Navy, 2004)
Summary of missions (Button et al., 2009)
• Intelligence, Surveillance, Reconnaissance (ISR)
• Mine Countermeasures (MCM)
• Anti-Submarine Warfare (ASW)
• Inspection/Identification (ID)
• Oceanography
• Communications / Navigation Network Node (CN3)
• Payload Delivery
• Information Operations (IO)
• Time Critical Strike (TCS)
• MCM
• Deploy leave-behind surveillance sensors or sensor arrays
• Near-land and harbor-monitoring
• Oceanography
• Monitoring Undersea Infrastructure
• ASW Tracking
• Inspection/Identification
Table 1. UUV missions of the US Navy
UUV Master Plan을 바탕으로 2009년 RAND 연구소 는 무인잠수정의 임무 요약을 추가적으로 분석하였고 Table 1의 우측과 같이 7개의 추천 임무를 요약하여 제 시하였다. 이는 UUV Master Plan에서 제시한 9가지의 임무 중 중요도가 높은 5개의 임무를 보다 세분화하여 제 시한 결과이며, 이 중에서도 공통으로 제시된 중요 임무 중 하나는 대잠전(Anti-Submarine Warfare, ASW) 분야 이다. 특히 무인잠수정의 능력을 고려하여 연안 지역의 대잠작전에 초점을 맞추었다. 본 연구에서는 무인잠수정 의 주요 임무로 선정된 대잠전의 효과적 수행을 위하여 대잠전 운용개념을 보다 주의 깊게 살펴보고자 한다.
2.2 대잠전 분야 운용개념
UUV Master Plan에서는 대잠전 분야 운용개념을 크 게 위험제어(Hold at Risk), 해양방어(Maritime Shield), 항로보호(Protected Passage) 3가지로 분류하였으며, 그 개념을 도식화한 것은 Fig. 1과 같다.
Fig. 1에서 나타나는 바와 같이 위험제어는 항만 입구의 길목에서 잠수함을 감시하는 임무, 해양방어는 항모강습단 또는 원정강습단의 작전구역(Miscellaneous operational details, local operations: MOLDOC)을 보호하는 임무이 며 항로보호는 작전구역 간 이동 시 그 항로를 보호하는 임무이다. 해양방어와 항로보호는 미 해군이 전 세계에서 원정작전을 수행하는 것을 감안하여 강습단을 위험으로 부터 보호하는데 무인잠수정이 적합하다고 판단한 것으 로 예측된다. 본 연구에서는 앞서 제시한 3가지의 운용개
Fig. 1. ASW Nomenclature (US Navy, 2004)
념 중에서 위험제어를 가장 주요한 무인잠수정의 임무로 판단하였으며, 해양방어 및 항로보호는 무인잠수정의 제 한된 기동력과 스텔스 기능에 대한 낮은 필요성을 고려 하여 위험제어에 비해 상대적으로 그 중요도가 낮다고 기술하였다.
1)
국내 연구기관에서도 최근 대잠정찰 목적의 무인잠수 정에 요구되는 운용개념을 도출하였으며(Kang et al, 2019), 다음과 같이 크게 4가지 운용개념을 제시하였다.
1. 적 항구/항만 대잠 감시
․
정찰을 통한 정보습득 2. 대잠 감시․
정찰 및 적 잠수함 추적3. 예상 침투로 대잠 탐색 및 적 잠수함 거부 4. 유
․무인 복합 대잠 탐색
여기서 제시한 운용개념 또한 미 해군의 위험제어 임 무와 동일한 ‘적 항구/항만 대잠 감시․정찰을 통한 정보 습득’을 가장 우선적인 운용개념으로 제시하고 있다. 이 는 무인잠수정이 은밀성이 보장되는 플랫폼임과 동시에 센서를 통한 정보수집이 가능하여 추가적인 위험부담 없 이 우군의 탐지능력을 증대시킬 수 있는 등 그 효용성이 매우 높은 데서 기인한 것이다. 따라서 본 연구에서는 위 험제어를 가장 우선순위가 높은 시나리오로 채택하여 무 인잠수정의 시뮬레이션을 수행하고자 한다.
2.3 위험제어(Hold at Risk) 시나리오
본 연구에서 수행한 위험제어 시나리오는 미 해군에서
1) US Navy (2004), pp12: UUVs offer significant force multiplication for
ASW operations in the Hold at Risk scenario. While offering some
advantages in the other two categories (Maritime Shield and Protected
Passage), the UUVs limited mobility and the lesser need for stealth
make UUVs less ideal candidates in those cases.
제시한 ‘위험제어’와 국내 연구기관에서 제시한 ‘적 항구/
항만 대잠 감시정찰을 통한 정보습득’과 동일한 임무 개 념으로 다음과 같이 시나리오를 보다 구체화하였다.
시뮬레이션의 일반 가정 사항으로, 위기가 고조된 상 황에서 아측은 무인잠수정의 장점인 인명피해 최소화, 은 밀성 등을 최대한 활용하여 적 항구/항만 입구에 무인잠 수정을 발진하여 탐색활동을 시작한다. 이때 시뮬레이션 상 무인잠수정은 적 잠수함에 피탐되지 않는다고 가정한 다. 또한, 주어진 사전 정보로써, 적 항구/항만의 위치, 적 잠수함의 기본적인 출항 여부는 알고 있지만 정확한 출 항 날짜 및 시간, 이동경로, 수상항해 후 잠항 항해로 변 환하는 시점은 모르는 것으로 가정하고 이를 시뮬레이션 에서 확률적으로 시행되도록 하였다.
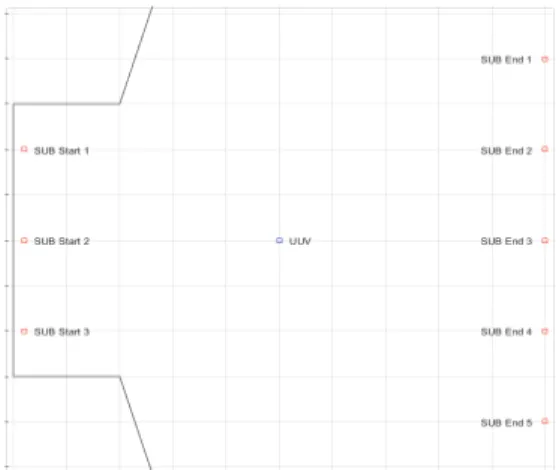
무인잠수정은 임의로 설정할 수 있는 항로 폭, 길이, 수심을 가지는 적 항구/항만의 입구에서 일정 속력으로 로이터링(Loitering) 기동을 실시하며 음향정보 및 제한 된 표적 기동정보를 수집하는 것을 임무로 한다. 이때 잠수함의 최초위치는 항로 폭 내에서 확률적으로 결정 되며, 내해에서 외해로, 수상항해에서 잠항항해로 상태 를 변경하여 기동한다고 가정한다. 전반적인 시나리오 전장(war-field)과 무인잠수정의 로이터링 기동은 각각 Fig. 2 및 Fig. 3과 같다. 로이터링 기동 시 무인잠수정은 탐지범위를 고려하여 항로 폭의 일정 범위 내에서 기동 하는 것으로 설정한다. 또한, 앞서 가정한 바와 같이 적 잠수함이 출항할 것이라는 정보는 알고 있지만 정확한 시간, 이동경로, 잠항항해 시점은 알 수 없으므로 무인잠 수정이 로이터링 기동 중 탐지한 정보를 기반으로 적 잠 수함의 출항 여부를 인지하게 된다.
Fig. 2. A simulator war-field for Hold-at-Risk scenario
Fig. 3. Loitering pattern for a UUV
3. 시뮬레이션 모델 설계
지금까지 무인잠수정의 임무 및 운용개념을 바탕으로 선정한 시나리오에 관해 설명하였다. 본 장에서는 시뮬레 이터 구현을 위한 구성요소들의 모델에 관해 설명한다.
시뮬레이터 모델은 플랫폼에 따른 운동모델과 음향모델 그리고 환경모델로 구성되었다. 특히 음향모델에서는 센 서 배열에 따른 빔패턴을 기초로 하여 수동소나 방정식 을 이용한 표적 탐지 여부 판단 및 방위, 고각 추정 알고 리즘을 세부적으로 구현하였다.
3.1 좌표계
시뮬레이션 공간에 대한 좌표계는 적 항구/항만의 출 입항로 중심축을
축으로 하고 시뮬레이션 상 잠수함의 시작점을
으로 하는 직각좌표계를 도입한다. 이는 수면과
축 평면이 일치하고, 수심에 대해서는 음의
축을 적용하는 지면좌표계(North-East-Down, NED)와 일치하도록 설정하였다. 플랫폼(무인잠수정, 표적 잠수함) 고정좌표계는 전진 방향을 양의
축, 좌현(port) 방향을 양의
축 그리고 아래 방향을 음의
축으로 설정하였다.공간좌표계, 플랫폼좌표계 공통으로 방위(Azimuth)에 대 해서는
축 기준 반시계방향을 양의 방위 증가로 정의하 였고, 고각(Elevation)에 대해서도
축 기준 반시계방향 을 양의 고각 증가로 정의하였다.3.2 플랫폼 운동모델
무인잠수정과 표적 잠수함의 운동 모델은 3차원 공 간에서의 질점(point-mass) 모델을 적용하였다. 시나리 오에 따른 소나 시스템 성능을 체계적으로 분석하기 위 하여 운동 모델은 합리적인 수준에서 단순화하여 구현 (Kinematics model)하였으며, 이에 따라 조타, 외력, 관 성 등에 의한 영향 및 유도명령 시간지연 등의 요소는 배 제되었다.
무인잠수정과 표적 잠수함의 위치는 Equation (1)에 의해서 결정된다.
cos cos
cos sin
sin
(1)
여기서
는 플랫폼의 위치, 는 속도,
는 종 동요각 그리고
는 침로이다. 무인잠수정은 부여된 임무 수행을 위하여 착저, 로이터링, 탐색, 추적의 운동 상태로 구분되며, 잠수함은 수상항해, 수중항해, 잠항/부상, 회피 기동의 상태로 구분하였다. 각 운동 상태에서의 속도와 플랫폼별 회전반경을 이용하여 회전 각속도(침로 변화율) 가 결정되며, 종동요각은 최대치를 설정하고 이를 넘지 못하도록 하였다.Cand. Label Array configuration Position
#1 S0164 1 by 64 array STBD/PORT
#2 S0232 2 by 32 array STBD/PORT
#3 S0416 4 by 16 array STBD/PORT
#4 S0132 1 by 32 array STBD/PORT H0808 8 by 8 array Head
Table 2. SONAR sensor configuration candidate
3.3 수동 소나방정식
무인잠수정의 표적 잠수함 탐지 여부 판단은 소나방정 식을 이용한다. 수행하는 임무의 성격에 따라 능동 모드를 사용할 수도 있지만, 은밀성을 요구하는 위험제어 시나리 오 특성상 수동 모드만을 사용하였다. 수동 탐지모드에서 소나에 수신되는 여분 신호의 세기인 신호이득(Signal excess, SE)은 Equation (2)의 수동 소나방정식에 의해 결정되며,
이면 표적은 탐지되었다고 가정한다.
(2)Equation (2) 우변의 각 요소는 RN(Radiation Noise, 방사소음), TL(Transmission Loss, 전달손실), BLR
(Received Beam Loss, 수신 빔손실), NL(Noise Level, 소음준위), DI(Directivity Index, 지향지수), DT(Detection Threshold, 탐지임계치)이며, 각 요소에 대한 설명은 다 음 절에서 상세하게 기술한다.
3.4 플랫폼 음향모델
무인잠수정 탑재 소나의 형태에 따른 성능 비교를 위 하여 사용된 센서 개수는 128개로 고정하였고, 단위 센서 의 배열 형상 및 배치 위치에 따라 4가지 후보를 선정하 였으며 Table 2와 같다.
센서 간 간격은 탐지 주파수 대역(협대역 및 광대역 소 음)을 고려하여 선정하였다. 후보 #4의 경우, 다른 후보
와는 다르게 무인잠수정 측면 및 전방에 소나가 배치된 다는 특징이 있다.
탐지하고자 하는 주파수 대역 및 센서 배열에 따라 동 일한 방위에서 입력되는 신호라도 소나에서 감지하는 신 호의 세기가 달라진다. 이렇게 결정되는 소나의 신호 세 기 패턴을 빔패턴(Beam Pattern)이라고 하며, 2차원 평면 공간에서 등간격선형 배열에 대한 빔패턴은 가장 기본적 인 신호처리 기법인 Delay-and-sum beamforming을 이 용하여 Equation (3)과 같이 표현할 수 있다(Barry et al, 1988).
log
exp
sin
(3)
여기서 은 센서의 개수,
는 신호의 주파수,
는 센 서 간 거리,
는 센서 배열 연직방향과 신호원의 방위가 이루는 각도이며
는 신호의 속력을의미한다. 빔패턴은 조향각(steering angle)을 조정하 여 그에 따라 변화되는 빔패턴을 얻을 수 있으며, 본 연 구에서는 최대 신호출력에서 3dB 낮은 출력의 방위폭 (Half Power Beam Width, HPBW)으로 조향각을 조정 하여 빔패턴을 형성하였다.
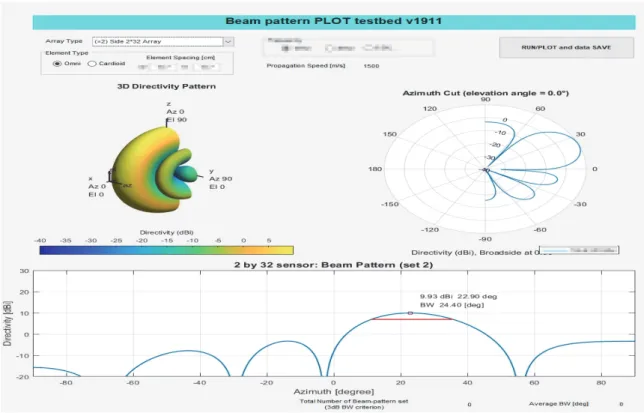
3차원 빔패턴은 시뮬레이터에서 실시간 기동 상황을 고려할 때 연산능력이 제한되므로, Fig. 4와 같이 소나 형 상별 빔패턴 분석을 위한 별도의 소트프웨어를 제작하였 으며, 이를 통해 생성된 데이터를 데이터베이스화(Data Base, DB)하여 활용하였다.
빔패턴을 통해 확인할 수 있는 중요한 소나 성능지표 중 하나는 지향지수(DI)이다. 이는 특정 방위를 지향해서 수신하는 능력으로 표현할 수 있으며, Equation (4)로 정 의된다.
log
(4)여기서 와 는 각각 특정 방향에 대한 신호강도 (intensity) 및 전 방향에 대한 평균 신호강도이다. 본 연구 에서 지향지수는 Back-baffle 상태에서 수치를 구하였다.
무인잠수정 소나 빔패턴과 관련된 또 다른 요소는 수 신 빔손실(BLR)이다. 수신 빔손실(BLR)은 빔패턴의 조향 각과 실제 소음원의 방위각 불일치에 의해 발생하는 신 호의 손실을 의미한다. 예를 들어, Fig. 5와 같이 -40도에 서 입사되는 신호와 정확하게 일치하는 조향각을 가진
빔패턴이 없는 경우 각각의 빔패턴에서는 최대로 수신할 수 있는 신호의 세기 대비 일정 수준 손실이 발생하게 된 다. 각 빔패턴(총 7개)에서 측정되는 수신 빔손실(BLR)은 Fig. 6과 같이 나타난다. 실제 시뮬레이터에서는 방위와 고각에 대한 손실을 모두 고려하여 적용하였다.
Fig. 5. Steering angle of HPBW Beam patterns (total 7 in this
example) and incidence angle inconsistency example잠수함에서 발생하는 방사소음(RN)은 주파수 대역별 잠수함 속도 변화에 따른 경향성을 함수화하였다. 한편 프로펠러가 있는 함미에서의 소음이 함수보다 더 크게 측정되는 현상을 반영한 경우와 전 방위 균일 소음이 방 사된다고 가정한 두 가지 옵션을 두었다.
Fig. 6. BL
R of each beam pattern3.5 환경모델
수동 소나방정식에 영향을 미치는 환경적 요인으로는
Fig. 4. Beam Pattern Analysis SW
전달손실(TL)과 소음준위(NL)이 있으며, 전달손실은 Equation (5)로 정의된다.
log
(5)여기서 는 소리의 확산정도를 나타내는 분산계수,
은 무인잠수정과 잠수함 간 거리,
는 주파수에 따라 결정되는 흡수계수이다(Schulkin and March, 1962).소음준위(NL)는 Wenz Curve를 이용하여 협대역, 광대 역 주파수의 해상상태 1, 2, 3에 대한 수치를 사용하였다.
3.6 표적 잠수함의 방위 및 고각 추정
앞서 언급된 수동 소나방정식과 음향모델 인자들을 이 용하여 표적의 탐지 여부를 판단한다. 소나 형상에 따라 만들 수 있는 HPBW 빔패턴 세트 수는 다르지만, 각 빔 패턴 중 하나라도
인 경우 표적이 탐지되었다고 선언하고 방위와 고각을 결정하게 된다.본 연구에서 선정한 소나 후보군의 센서 배열 형상은 좌우 횡방향의 센서 수가 상하 종방향의 수보다 많다. 따라서 횡방향으로 형성되는 빔패턴은 종방향보다 좋은 방위 분해능을 갖게 된다. 이러한 특징을 고려하여 방위 를 추정하는 방법과 고각을 추정하는 방법에 각각 빔패 턴 진폭 기반 방위 추정법과 위상차 기반 고각 추정법 (Monopulse Signal Processing)을 적용하였다.
진폭 기반 방위 추정법에 의해 방위(Azimuth)를 추정 하는 방법은 다음과 같다. 만약 하나의 빔패턴에서만 표 적이 탐지된 경우(
), 해당 빔패턴의 조향각을 표 적 방위로 추정하지만, 2개 이상의 빔패턴에서 표적이 탐Fig. 7 Spline interpolation example: determine target
bearing as 53 degree with three SE>0 beam-pattern.
Fig. 8. Two channel input signal geometry
지된다면 Spline 보간법(interpolation)을 적용하여 보다 정밀한 방위를 추정하도록 하였다. 즉, Fig. 7에서와 같이 3개의 빔패턴에서 표적이 탐지되고 각 빔패턴의 조향각 정보 및 SE 정보가 주어진다면, 보간법에 의해 최대 SE 를 가지는 표적 방위를 결정할 수 있다.
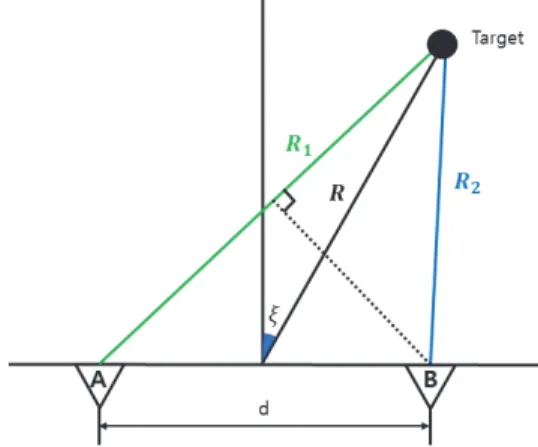
반면 표적의 고각(Elevation)을 추정할 때에는 보간법 을 적용할 수 있을 정도의 빔패턴이 형성되지 않는다. 따 라서 센서에 입력되는 신호의 위상차를 활용한 모노펄스 (monopulse) 각도 추정법을 활용하였다(Sim et al., 2015).
모노펄스 각도 추정법에 의해 표적의 위치를 추정하는 식은 Equation (6)과 같으며, 두 센서 그룹에서 신호를 수 신했을 때 표적의 고각을 추정하는 기하학적 형태는 Fig.
8과 같다.
sin
(6)여기서
는 수중에서의 음속을 나타내며,
의 채널 간 격을 가지는 소나에
의 각도로 표적이 존재한다면, 표적 의 각도(고각)은 두 채널
에 입사된 신호의 시간지 연
을 추정(
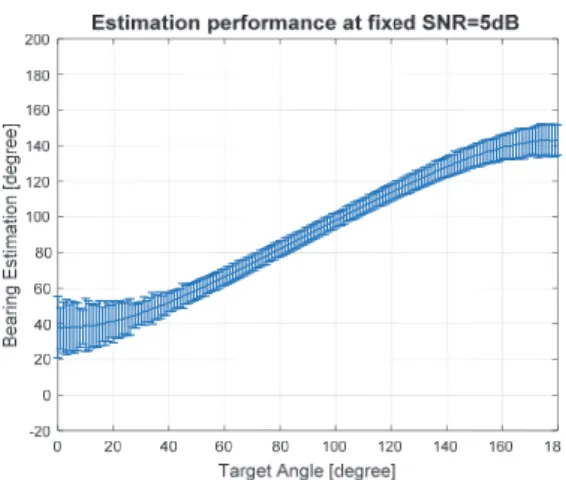
)하여 구할 수 있다.Fig. 9, 10에서는 각각 표적의 각도와 입사 신호의 신 호대잡음비(Singnal-to-Noise Ratio, SNR)에 따라 모노 펄스 각도 추정법의 성능 변화 추이를 보여준다(반복 실험법에 의한 추정 분산 도시). Fig. 9, 10에서 나타나 듯이 표적이 소나와 수직 방향에 있을수록, 그리고 신호 대잡음비가 높을수록 성능이 좋아지는 것을 확인할 수 있다.
Fig. 9.
estimation performance with varying target angleFig. 10.
estimation performance with varying SNR4. 시뮬레이터 사례 분석
개발된 시뮬레이터는 임의의 잠수함 경로에 대해서 무 인잠수정의 다양한 변수들을 변경하여 반복실험(Monte Carlo simulation)이 가능하도록 구현하였다. 반복실험의 경우 시뮬레이션에서 고려된 확률 오차 성분에 따라 매 번 다른 결과가 도출되므로 통계분석을 통해 임무 수행 에 적합한 소나 센서 배열을 도출해낼 수 있을 뿐만 아니 라, 성능지표 변화의 경향성도 확인할 수 있다.
또한 개발된 시뮬레이터를 이용하여 다양한 시스템 구 성요소와 파라미터들을 종합하여 임무 수행에 대한 성능 지표의 차이를 확인하고 나아가 변수값 변경에 따른 경 향성을 분석하는 데 용이하게 사용된다. 예를 들어 위험 제어 임무의 경우, 소나 후보군의 선택에 따라 방위와 고 각 추정의 정확성에 있어서 트레이드오프(tradeoff)가 있
을 수 있다. 또한 사용하는 주파수 대역에 따라 분해능 및 탐지거리의 트레이드오프도 존재한다. 소나의 배치가 정면과 측면에 분산 배치된다면, 표적 추적 시 운동경로 설정은 용이할 수 있으나 전체적인 탐지성능은 저하될 것이고, 측면에만 존재한다면 소나 탐지성능은 우수한 반 면, 지속적인 탐지와 무인잠수정의 운동경로 설정에 어려 움이 존재하게 된다.
Fig. 11(a)는 개발된 시뮬레이터를 임의 조건에서 구 동한 화면 예제이다. 시뮬레이션을 실행하게 되면 기동하 는 무인잠수정(파란실선)과 잠수함(붉은실선)의 궤적을 실시간 확인할 수 있으며, 다각도에서의 종합적인 이해를 돕기 위하여 3차원, 수심(xz평면), Top-view(xy평면) 위 치정보를 동시에 전시하도록 하였다. Fig. 11(a) 우측 상단
(a) An example of a single run (3D maneuvering view(Left-Top), depth view(xz-plane, Left-Bottom)
and Top-view(xy-plane, Right-Bottom))
(b) Parameters in the UI
Fig. 11. Simulator UI
(a) Simulation result of S0232 sensor configuration
(b) Simulation result of S0416 sensor configuration
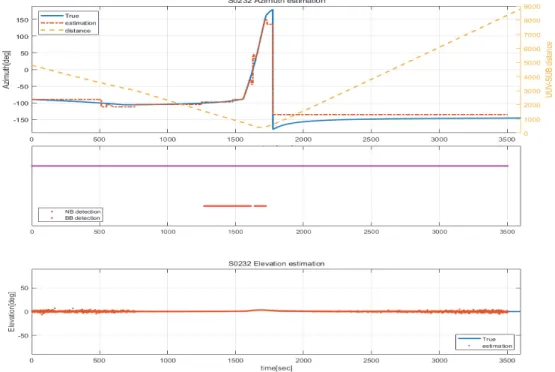
Fig. 12. Simulation result comparison: Target distance, detection, bearing and elevation estimation result
은 시뮬레이터 실행 시 변수 설정창으로 Fig. 11(b)에 확 대하여 표현하였다. 시나리오1(위험제어)에 대한 실험을 진행하기 위해 항로의 길이(distance A), 폭(distance B), 해상상태 등의 공통변수, 환경변수 등을 설정할 수 있으 며, 잠수함 및 무인잠수정의 세부 변수를 지정할 수 있도 록 구현하였다.
시뮬레이션이 종료되면 무인잠수정 소나에서 표적의 탐지 여부, 방위 및 고각 추정 결과를 Fig. 12와 같이 확 인할 수 있으며 추가적인 분석이 가능하도록 설정하였다. Fig. 12에서는 동일한 이동 궤적을 가지는 무인잠수정과 잠수함의 운동에 대해 서로 다른 센서 배열(Table 2의 S0232와 S0416)을 이용하여 획득한 표적의 탐지여부, 방위 및 고각 추정결과를 비교하였다. Fig. 12(a)는 S0232 센서 배열을 사용하였을 때의 결과이며 상단 그림은 시 간에 따라 변화하는 무인잠수정과 잠수함의 실제 방위 각과 추정방위각 그리고 거리를 나타내며, 중간 그림은 시간에 따른 협대역(NB, Narrow Band)과 광대역(BB, Broad Band) 주파수에 대한 무인잠수정의 표적 탐지여부 그리고 하단 그림은 시간에 따른 무인잠수정과 잠수함의 실제 고각과 추정고각을 나타낸다. Fig. 12(b)는 S0416 센서 배열을 사용하였을 때 동일한 정보에 대한 결과를 도식화하였다. 두 가지 센서 배열의 광대역 주파수 탐지 결과에서 공통적으로 확인할 수 있듯이 무인잠수정과 잠수함의 거리가 매우 근접해 있다고 하여도, 무인잠수 정 함수에 잠수함이 위치하는 경우 소음 탐지 음영구역 (shadow zone)에 진입하여 탐지가 안 되는 현상(약 1600 초 인근)을 확인할 수 있다. 반면 협대역 주파수의 경우 형성되는 빔폭이 넓어서 음영구역 미탐지 현상이 발생하 지 않았다.
Configuration S0232 S0416
Ratio of Detection
Narrow Band 97.3% 81.2%
Broad Band 11.9% 12.3%
RMSE of Azimuth 13.2294 16.2059 RMSE of Elevation 2.4183 2.3153
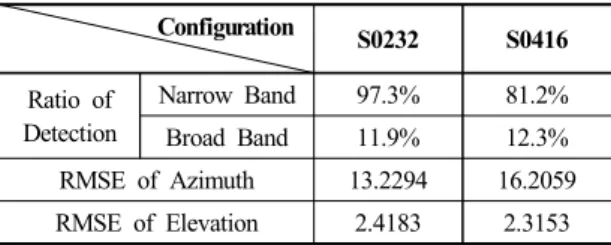
Table 3. Simulation results
Table 3에서는 S0232와 S0416 센서 배열을 사용했을 때의 협대역과 광대역 탐지 횟수, 방위각 추정 오차 그리 고 고각 추정오차를 정량화하여 비교하였다. 두 가지 실 험결과에서 공통적으로 확인할 수 있듯이 무인잠수정와 잠수함의 이격 거리가 동일할 때 감쇄비에 의해 광대역
소음의 탐지 빈도가 협대역 소음의 탐지 빈도보다 낮게 나타났다. 방위 추정결과를 비교하면 수평으로 배치된 센 서의 수가 더 많아 분해능이 우수한 S0232가 낮은 추정 오차를 나타내었고, 고각 추정 성능은 수직방향으로 배치 된 센서의 수가 더 많은 S0416에서 낮은 분산도가 나타 나는 것을 확인할 수 있다.
5. 결론
본 연구에서는 무인잠수정의 효과적인 대잠전 수행을 위해, 시나리오 기반의 무인잠수정 소나 센서 배열 선정 을 위한 시뮬레이터를 개발하였다. 먼저, 대잠전 분야에 서 무인잠수정의 임무 및 운용개념을 분석하여 가장 주 요한 임무를 도출하여 시뮬레이션 시나리오로 선정하였 다. 다음으로, 시뮬레이터를 구성하는 모델을 크게 플랫 폼 운동모델과 음향모델 그리고 환경모델로 구분하여 제 시하였다. 특히 음향모델 구현의 충실도를 높이기 위하 여, 센서 배열에 따른 빔패턴을 기반으로 수동 소나방정 식을 이용한 탐지 여부를 판단하였으며, 탐지되었을 경우 빔패턴 진폭 기반의 방위 추정과 함께 위상차 기반의 모 노펄스 고각 추정을 적용하였다. 표적의 방위 및 고각 추 정을 위해 빔패턴 진폭 기반 방위 추정탑재 소나의 센서 배열과 부여된 임무 수행 간의 관계를 확인하기 위한 목 적에 합당하도록 다양한 센서 배열 후보를 선정하여 실 험이 이루어졌고, 그에 따른 실험결과와 경향성도 확인할 수 있었다.
탑재 소나의 센서 배열과 부여된 임무 수행 간의 관계 를 확인하기 위한 목적에 합당하도록 다양한 센서 배열 후보를 선정하여 실험이 이루어졌고, 그에 따른 실험결과 와 경향성도 확인할 수 있었다. 본 논문에서 개발한 시뮬 레이터는 향후 무인잠수정 소나 센서 배열 선정에 고려 될 수 있는 다양한 시나리오에 대한 적용 가능성을 시사 하며, 이를 바탕으로 대잠전 임무를 위한 무인잠수정의 효과도 분석 연구에도 적용 가능할 것으로 기대된다.
References
Allard, Y. and E. Shahbazian (2014) Unmanned
Undersea Vehicles (UUV) Information Study, OODA
Technologies, Canada.Button, R.W., J. Kamp, T.B. Curtin and J. Dryden (2009) A Survey of Missions for Unmanned Undersea
Vehicles, RAND National Defense Research Institute,
USA.
Barry D. V., K. M. Buckley (1988) “Beamforming: A Versatile Approach to Spartial Filtering”, IEEE
ASSP Magazine, 5(2), 4-24
Hwang, A., M. Kim and S.Y. Lee (2012) “A study of simulation model for effectiveness analysis simulation of unmanned underwater vehicle for mine searching”,
Journal of the Korea Institute of Military Science and Technology, 15(4), 410-416.
(황아롬, 김문환, 이심용 (2012) “기뢰 탐색 작전용 무인잠수정 효과도 분석 시뮬레이션을 위한 시뮬레 이션 모델 연구”, 한국군사과학기술학회지, 15(4), 410-416).
Hwang, A., M. Kim, S.Y. Lee, J. Yoon and C. Kim (2011) “A study on unmanned underwater vehicle operational performance analysis for mine search operations”, Journal of the Korea Institute of
Military Science and Technology, 14(5), 781-787.
(황아롬, 김문환, 이심용, 윤재문, 김찬기 (2011) “무 인잠수정 기뢰 탐색 효과도 분석”, 한국군사과학기술 학회지, 14(5), 781-787).
Kang, H.B., H.J. Lee, S.H. Kim and H.G. Park (2017)
“Allocations and robust fuzzy control for waypoints tracking of large displacement unmanned underwater vehicles”, The Transactions of the Korean Institute
of Electrical Engineers, 66(2), 402-408.
(강형빈, 이호재, 김성훈, 박호규 (2017) “대형급 무 인잠수정의 임무의 중요성에 따른 목표 경로점 선정 및 제어를 위한 T-S 퍼지모델 기반 강인 제어기 설 계”, 전기학회논문지, 66(2), 402-408).
Kang, H., S. Hong and J. Sur (2019) “A study on the operation scenarios of unmanned underwater vehicles for an ASW-ISR”, Proceedings of the Conference
of the Korea Institute of Military Science and Technology, 2239-2240.
(강현석, 홍승민, 서주노 (2019) “대잠정찰을 위한 무 인잠수정의 운용시나리오 연구”, 2019 한국군사과학 기술학회 종합학술대회논문집, 2239-2240).
Lee, O.-S. (2017) “A direction of development of large UUVs for anti-submarine warfare connected to the future warfare development trend of the Navy”,
Defense & Technology, 457, 80-89.
(이오생 (2017) “해군의 미래전 발전추세와 연계한
대잠전용 대형 무인잠수정 발전방향”, 국방과 기술, 457, 80-89).
Lee, P.-H., S.-K. Park, S.T. Kwon, S. Park, H. Jung, M.-S. Park and P.-M. Lee (2015) “Dynamic modeling of autonomous underwater vehicle for underwater surveillance and parameter tuning with experiments”,
Journal of Ocean Engineering and Technology, 29
(6), 488-498.(이필엽, 박성국, 권순태, 박상웅, 정훈상, 박민수, 이 판묵 (2015) “수중정찰용 자율무인잠수정의 운동 모 델링 및 시험을 통한 계수 조정”, 한국해양공학회지, 29(6), 488-498).
Schulkin, M., & Marsh, H. W. (1962). Sound absorption
in sea water, The Journal of the Acoustical Society
of America, 34(6), pp.864-865.Sim, H. K., Jung, M. A., & Kim, S. C. (2015). A performance analysis of phase comparison monopulse algorithm for antenna spacing and antenna array.
The Journal of Korean Institute of Communications and Information Sciences, 40(7), 1413-1419.
(심헌교, 정민아, 김성철. (2015). 안테나 간격 및 배 열에 따른 위상 비교 모노펄스 알고리즘의 성능 분 석. 한국통신학회논문지, 40(7), 1413-1419).
US Navy (2004) The Navy Unmanned Undersea
Vehicle (UUV) Master Plan, Department of the
Navy, USA.Yoo, T.-S. and M.H. Kim (2014) “Analysis of integrated navigation performance for sensor selection of unmanned underwater vehicle”, Journal of Ocean
Engineering and Technology, 28(6), 566-573.
(유태석, 김문환 (2014) “무인잠수정 센서 선정을 위 한 복합항법 성능 분석”, 한국해양공학회지, 28(6), 566-573).
Yoo, T.-S., M.H. Kim, J.H. Hwang and S.I. Yoon (2016) “Development of navigation HILS system for integrated navigation performance analysis of large diameter unmanned underwater vehicle”,
Journal of Ocean Engineering and Technology, 30
(5), 367-373.(유태석, 김문환, 황종현, 윤선일 (2016) “대형급 탐 색용 무인잠수정 복합항법 성능 분석을 위한 항법 HILS 시스템 개발”, 한국해양공학회지, 30(5), 367- 373).
신 명 인 (ORCID : https://orcid.org/0000-0003-3456-8123 / [email protected])
2010 고려대학교 학사(수학)2013 고려대학교 석사(수학)
2013~ 2017 해군사관학교 수학과 조교수 2017 고려사이버대학교 학사(전기전자공학)
2017~ 현재 세종대학교 해양시스템융합공학과 박사수료 관심분야 : 수중음향 신호처리, 무기체계 효과도 분석, 칼만 필터
이 진 호 (ORCID : https://orcid.org/0000-0003-4192-3912 / [email protected])
2002 해군사관학교 전기공학 학사2006 연세대학교 산업공학 석사
2012 미국 University of Texas at Austin 경영과학 박사 2012~ 현재 해군사관학교 국방경영학과 교수
관심분야 : 확률적 최적화, 시뮬레이션, 시스템 효과도 분석
홍 우 영 (ORCID : https://orcid.org/0000-0002-9022-8425 / [email protected])
1982 해군사관학교 전자공학과 학사1985 연세대학교 전자공학과 석사
1991 미국 University of Minnesota 전기공학과 박사 1985~ 2013 해군사관학교 교수
1997~ 2000 미국 해군사관학교 교환교수 2013~ 현재 세종대학교 국방시스템공학과 교수 관심분야 : 수중음향 신호처리, 무기체계 효과도 분석
김 우 식 (ORCID : https://orcid.org/0000-0003-4235-6323 / [email protected])
1991 한국외국어대학교 물리학과 이학사1993 한국외국어대학교 물리학과 이학석사 2005 한국해양대학교 해양공학과 공학박사 1993~ 현재 국방과학연구소 책임연구원 관심분야 : 수중음향, 음향신호처리, 소나시스템
배 호 석 (ORCID : https://orcid.org/0000-0001-7819-4376 / [email protected])
2007 서울대학교 지구환경시스템공학부 학사2011 서울대학교 에너지시스템공학부 박사 2011~ 현재 국방과학연구소 선임연구원 관심분야 : 수중음향, 해양탐사, 소나시스템
조 현 진 (ORCID : https://orcid.org/0000-0003-1899-4616 / [email protected])
2005 해군사관학교 정보통신공학과 학사2009 Washington University in Saint Louis 전자시스템공학 석사 2016 고려대학교 전기전자전파공학과 박사
2016~ 현재 해군사관학교 전기전자공학과 교수 관심분야 : 수중 신호처리, 패턴인식