ISSN 1226-3133 (Print)․ISSN 2288-226X (Online)
광 지연선 기반의 넓은 고도 범위를 갖는 고정밀 FMCW 전파고도계 송수신기 설계
Design of the Transceiver for a Wide-Range FMCW Radar Altimeter Based on an Optical Delay Line
최 재 현․장 종 훈․노 진 입 Jae-Hyun Choi․Jong-Hun Jang․Jin-Eep Roh
요 약
본 논문은 넓은 고도 범위와 낮은 측정 오차를 갖는 주파수 변조 연속파(FMCW) 레이더 고도계의 설계 방안을 제안한 다. 측정 고도의 동적 범위를 줄이기 위해 전파 고도계의 송신 경로에 광 지연선을 적용하여 넓은 고도 범위를 얻을 수 있다. 송신 전력과 수신단 이득을 제어하여 또한 수신 전력의 동적 범위를 줄일 수 있다. 더불어, 직접 디지털 합성기 를 사용하여 변조 선형성을 향상시키고, 기준 클럭 신호를 위상 고정 루프의 옵셋(offset) 주파수로 사용하여 위상잡음을 최소화함으로써 낮은 고도 측정오차를 갖는다.
Abstract
This paper presents the design of a Frequency Modulated Continuous Wave(FMCW) radar altimeter with wide altitude range and low measurement errors. Wide altitude range is achieved by employing the optic delay in the transmitting path to reduce the dynamic range of measuring altitude. Transmitting power and receiver gain are also controlled to have the dynamic range of the received power be reduced. In addition, low measurement errors are obtained by improving the sweep linearity using the Direct Digital Synthesizer(DDS) and minimizing the phase noise employing the reference clock(Ref_CLK) as the offset frequency of the Phase Locked Loop(PLL).
Key words: FMCW, Radar, Altimeter, Wide-Range, Phase Noise
국방과학연구소(Agency for Defense Development)
․Manuscript received September 4, 2014 ; Revised October 15, 2014 ; Accepted October 20, 2014. (ID No. 20140904-071)
․Corresponding Author: Jae-Hyun Choi (e-mail: [email protected])
Ⅰ. 서 론
전파 고도계(radar altimeter)는 주기적으로 전파를 송신 하고, 지표면에서 반사되어 되돌아오는 반사파를 수신, 분석하여 지상 고도 및 지형에 대한 여러 가지 정보를 획 득하는 장비이다. 전파 고도계는 탑재되는 플랫폼에 따라 위성(spaceborne) 또는 비행기(airborne)용으로 분류할 수 있다. 위성에 탑재되는 전파 고도계는 현재 해양학 및 지
구물리학의 응용에 널리 이용되어 강수량 측정에 사용되 기도 하며[1], 지표면의 반사계수를 측정하여 풍속, 파랑 주기(wave period) 등을 추론하는데 사용되기도 한다[2]. 땅 과 물의 반사계수 차이를 활용하여 호수나 강과 같은 내 륙의 물 분포의 변화 추이를 관찰하는데 이용되기도 한 다[3]. 토성 탐사 위성 카시니-하위헌스(Cassini-Huygens)호 에 전파고도계를 탑재하여 토성의 위성인 타이탄 표면의 지형을 탐사하는 등 우주개발에도 활용되고 있다[4]. 비행
기에 탑재되는 전파 고도계는 남극 해빙의 눈 두께를 측 정하는데 사용되기도 하며[5], 주로 항법 응용에 있어서 독립된 센서로 사용되어 지표면으로부터 비행기의 상대 고도를 측정함으로써 지표면과 충돌을 피하기 위한 착륙 보조 장치나 비행기, 미사일 또는 무인 항공기의 지형 대 조 항법을 위한 용도로 사용되고 있다[6].
전파 고도계에 일반적으로 사용되는 방식에는 FMCW Frequency Modulated Continuous Wave) 방식과 pulse 방식 이 있다. FMCW 방식은 1938년 처음 개발되어 민간 항공 기에 주로 이용되고 있으며, pulse 방식은 1960년대에 개 발되어 군용기에 더 많이 사용되고 있다[7]. FMCW 방식 은 FM 변조 파형을 송신하고, 송신파와 수신파를 주파수 혼합하여 차 주파수(beat frequency)를 측정하여 FFT(Fast Fourier Transform)를 취함으로써 최대 세기의 차 주파수 에 해당되는 고도를 추적한다. 또한, Pulse 방식은 송신파 와 수신파의 시간차를 측정하여 고도를 산출하며, 수신 pulse의 leading edge를 추적해 최근점 고도를 측정한다[7]. 전파 고도계는 넓은 고도 범위에 걸쳐 정밀한 정확도 가 필요하다. 일반적으로 전파 고도계의 정밀도는 항공기 가 지형의 바로 위에서 관제 비행(controlled flight)을 필요 로 할 때, 예를 들어 착륙 시와 같은 경우에 저고도에서 더욱 중요하게 된다. 고고도에서의 정밀도 또한 지형 보 조 항법 응용에 있어 중요하다. 종래의 전파고도계는 저 고도 또는 중장고도 용으로 나뉜다. 그러나 넓은 고도 범 위를 측정하는 것은 많은 문제점을 야기한다. Pulse 방식 의 고도계는 저고도에서 짧은 펄스 폭(pulse width)이 필요 하므로 넓은 대역폭을 필요로 하여 이는 감도(sensitivity) 저하를 가져온다. 따라서 저하된 감도를 보상하기 위해서 고고도에서 높은 송신 전력이 필요하게 된다. 또한, FM- CW 방식의 고도계에서는 넓은 고도 범위에서 차 주파수 가 광범위하게 변화하기 때문에 넓은 수신단 대역폭이 필요하다. 즉, 두 가지 변조방식 모두에서 대역폭 제한이 라는 문제점이 발생될 수 있다. FMCW 전파고도계에서 또 다른 문제점은 송신 안테나로부터 수신 안테나로의 일정량의 커플링이다. 이러한 간섭 신호는 저고도에서 성 능 저하를 야기하고, 수신 전력의 크기와 비교하여 간섭 신호의 크기가 큰 고고도에서는 항공기의 고도를 결정하 는 신호로 잘못 인지될 수 있다[8].
그러므로 본 논문에서는 이러한 문제점을 해결하고자
넓은 고도 범위와 고정밀한 수신 특성을 갖는 효율적인 FMCW 전파고도계 설계 방안을 제안한다. 제안된 FM- CW 전파고도계는 성능 저하 없이 고도 범위를 늘리기 위 해 광 지연선과 송신 전력/수신단 이득 제어를 사용한다.
뿐만 아니라, 직접 디지털 합성기와 위상 고정 루프에 기 준 클럭 신호를 옵셋 주파수로 사용함으로써 높은 선형성 과 낮은 위상 잡음을 갖도록 하여 낮은 측정 오차를 갖 는다.
Ⅱ. FMCW 방식 동작 이론
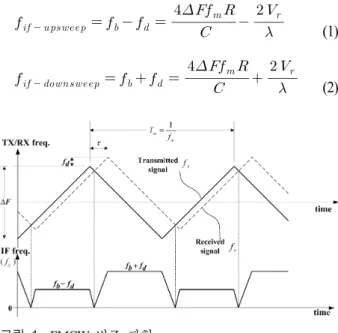
그림 1은 FMCW 변조 방식의 송수신 파형이다. 그림 1은 삼각파 변조한 경우로서, 송신 신호는 (Hz), 수신 신호는 (Hz)이고, 중간주파수 (Hz)는 송신 신호와 수신 신호의 차 주파수( )이다. 여기서, (sec) 은 변조 주기, (Hz)는 변조 대역폭이다. 수신 신호 는 지형에 반사되어 고도 (m)에 해당하는 지연 시간
(sec) 만큼 지연되고, 지형과의 상대 속도() 에 해당하는 만큼의 도플러 천이 가 발생한 다[9].
따라서 중간주파수 (Hz)는 다음 식 (1) 및 식 (2)와 같이 계산된다.
(1)
(2)
그림 1. FMCW 변조 파형
Fig. 1. FMCW modulation waveform.
비트 주파수()는 식 (1), (2)로부터 식 (3)으로 나타낼 수 있다.
(3)
따라서, upsweep 시의 중간주파수( )와 down- sweep 시의 중간주파수( )를 측정하고, DSP processing을 통하여 비트 주파수를 구하면 고도()를 산 출할 수 있다. 식 (3)에서 비트 주파수는 변조 대역폭() 과 고도()에 비례하므로, 고고도에서 비트 주파수가 높 게 된다.
Ⅲ. FMCW 전파고도계 송수신기 설계/제작 FMCW 전파고도계의 간략화된 블록도를 그림 2에 나 타내었다. FFT(Fast Fourier Transform)를 취하여 얻은 upsweep 시와 downsweep 시의 중간주파수로부터 비트 주 파수를 얻을 수 있고, 이는 식 (4)와 같이 표현된다.
(4) 여기서, (m)는 광 지연 모듈의 지연 거리이다.
식 (4)의 변조 대역폭()은 비트 주파수의 대역폭을 제한하기 위해 고도에 따라 제어한다. 저고도에서는 고고 도보다 상대적으로 더 큰 변조 대역폭을 사용하여 비트 주파수를 증가시키고, 안테나 커플링 신호 주파수로부터 멀어지게 한다. 따라서 원하지 않는 안테나 커플링 신호 는 고정된 대역폭을 갖는 대역 통과 필터(BPF)에 의해 감 쇠되고, 비트 주파수는 통과하게 된다. 더불어, 대역폭을 좁게 할 수 있어 수신기 감도가 향상된다.
그림 2와 같이 넓은 고도 범위를 얻기 위해 광 지연 모 듈(optic delay module)이 사용되었다. 광 지연 모듈은 지 면으로부터 반사되어 수신된 신호에 미리 설정된 고도만 큼의 시간 지연 프로세싱을 수행하여 비트 주파수에 옵 셋을 제공한다. 따라서 송신 신호의 안테나 비정합, 기판 상의 누설 등에 의한 기저대역의 누설 노이즈 신호에 대 한 영향을 회피할 수 있다. 또한, 비트 주파수 옵셋은 또
그림 2. FMCW 전파고도계 블록도
Fig. 2. Block diagram of the FMCW radar altimeter.
다른 효과를 갖는다. 일예로, 측정 고도 범위가 1~10,000 m이고, 비트 주파수 옵셋이 125 m이면 측정 고도 범위는 126~10,125 m가 된다. 즉, 고도의 동적 범위는 40 dB에 서 19 dB로 감소된다. 그러므로 문제가 될 수 있는 펄스 폭 또는 수신기 대역폭 제한 문제 등이 해결될 수 있고, 넓은 고도 범위를 얻을 수 있다.
지형으로부터 반사되어 수신된 신호의 전력은 고도의 제곱에 반비례하고, 지형의 종류(산악, 눈, 해수면 등)에 대한 반사 특성(reflectivity)에 의해 변화한다. 그림 2와 같 이, 송신 전력 제어(TX power control) 및 수신 이득 제어 (RX gain control) 부분은 고도 변화에 따라 변화하는 만큼 의 수신 전력의 동적 범위를 보상한다. 송신 전력 및 수신 이득은 저고도에서 더 작고, 고고도에서 더 높도록 제어 된다. 송신 전력과 수신 이득을 낮추는 것은 전파 고도계 가 안테나 커플링 신호 등, 누설 경로 신호들을 억제하고, 원하는 지면 반사 신호 획득이 가능하도록 하는 역할을 한다. 따라서 송신 및 수신 전력을 제어하는 설계는 전파 고도계가 향상된 넓은 고도 범위와 저 감청 확률(low pro- bability of intercept) 능력을 갖도록 한다. 부가적으로, 그 림 2의 송수신기 구조는 상향 송신 구조에 기반을 두고 있다. FM 변조 신호는 직접 디지털 합성기(Direct Digital Synthesizer, DDS)로부터 낮은 주파수에서 생성되고, 고정 된 주파수 합성기(Fixed Synthesizer)에 의해 단측 상향 변 조되므로 coherent 하다.
그림 3은 그림 2에 있는 Modulation Synthesizer(변조 주 파수합성기)의 세부 블록도이다.
그림 3. Modulation synthesizer 블록도
Fig. 3. Block diagram of the modulation synthesizer.
FMCW 방식 설계에서 중요한 특성은 주파수 변조 선 형성(linearity)과 송신기의 위상 잡음(phase noise)이다. 비 선형성은 특히 고고도 측정 오차를 크게 하고[5], 송신기 위상 잡음은 수신기의 수신 감도를 저하시킨다[10],[11]. 그 림 3과 같이, 매우 안정된 주파수와 낮은 위상 잡음을 갖 는 DDS 신호는 PLL IC의 기준 신호로 인가된다. 이 기준 신호는 1/N로 분주되어 Ref_CLK에 의해 하향 변환된 FMCWout신호와 비교된다. Ref_CLK를 옵셋 주파수로 사 용하는 주파수 혼합 기법은 N-분주기의 분주비 N을 낮추 어 Modulation Synthesizer의 총 위상 잡음을 낮출 수 있다.
특히, free-running 발진기를 위상 고정 루프의 옵셋 주파 수 신호로 사용하는 방법[12]과 비교했을 때, Ref_CLK이 더 우수한 위상 잡음 특성을 가지므로 Ref_CLK를 옵셋 주파수로 사용하는 주파수 혼합 기법은 더 낮은 위상 잡 음을 갖는다.
그림 4. FMCW 전파고도계 송수신기 제작 사진 Fig. 4. Photo of the transceiver of the FMCW altimeter.
이렇듯, 제안된 송수신기 구조의 중요 장점은 coherent 하고, 매우 낮은 위상 잡음을 가지며, 0.01 % 이내의 변조 선형성을 갖는다. 따라서 FMCW 전파 고도계의 센서 정 확도가 향상될 수 있다.
그림 4는 그림 2의 Optic delay module이 제외된 송수신 기의 사진으로 크기는 110.1×94.5× 25 mm이다. 그림 2의 Optic delay module은 별도의 하우징에 제작하였다.
Ⅳ. 측정 결과
설계된 FMCW 전파 고도계의 고도 측정 오차를 알아 보기 위해 그림 5의 광 지연 시뮬레이터를 설계하였다.
그림 2의 TX 출력은 시뮬레이터의 입력으로 인가되고, 시뮬레이터는 일정 고도 지연과 도플러 신호()를 제공 한다. 또한, 시뮬레이터의 출력은 그림 2의 RX단에 연결 된다. 그림 5와 같이, 전파 고도계의 TX 출력 신호는 광 지연 시뮬레이터에 인가되어 하향 주파수 변환된 후 E/O converter를 거쳐 광 신호로 변환된다. 이 후 다수의 광 케 이블과 광 스위치로 구성하여 지연 고도를 여러 가지로 선택할 수 있도록 고안된 Optic cable을 거쳐 가상의 고도 를 모의하고, O/E converter를 거쳐 다시 RF 신호로 변환 된다. 여기서, 스위치 제어를 통해 광 케이블을 거치지 않 고 RF cable만 통과하여 수 m 이내의 저고도를 모의할 수 있다. RF 신호로 변환된 신호는 DDS와 단측 대역 상향 주파수 변환기를 통해 도플러 신호를 인가한다. 이 때 도 플러 주파수 또한 가변할 수 있다. 광 지연되고, 도플러 신 호가 인가된 신호는 다시 LO를 통해 상향 주파수는 변환 된다. 내부의 가변 감쇠기의 감쇠 값은 모의 고도 또는 모 의 지형(산, 해수면 등)에 따라 제어할 수 있다. 그림 2의
그림 5. 광 지연 시뮬레이터 Fig. 5. Optic delay simulator.
그림 6. 비트 주파수 스펙트럼 Fig. 6. Spectrum of the beat frequency.
FMCW 전파 고도계는 위상 잡음이 우수하므로, 그림 5의 광 지연 시뮬레이터를 통과한 신호가 오염되지 않도록 위상 잡음이 우수하도록 설계되어 있어, 그림 2의 FMCW 전파 고도계의 정확한 고도 측정 오차를 측정할 수 있다.
그림 6에 FFT(Fast Fourier Transform)후의 비트 주파수 의 스펙트럼을 나타내었다. 측정 거리는 325 m로 나타나 있고, 여기에는 그림 2의 광 지연 모듈의 비트 주파수 옵 셋 125 m가 반영되어 있다. 이 비트 주파수 옵셋은 실제 고도 계산 시 제거되므로 측정된 고도는 200 m이다. 그림 5의 광 지연 시뮬레이터의 실제 지연은 회로망 분석기의 시간 영역 분석을 통해 199.95 m(1.333 us)로 측정되었다.
따라서 고도 측정 오차는 약 0.025 %(0.05/200)이다.
Leakage @125 m는 그림 2의 optic delay module을 통과 하여 125 m 지연된 송신단 신호가 수신단으로 유입된 것 으로 판단된다. 그러나, 이 누설 신호의 크기는 고고도에 서 임계치(threshold level)보다 작고, 저고도에서는 지형으 로 부터의 실제 비트 신호가 이 누설신호보다 상당히 크 므로, 고도를 측정하기에는 아무런 영향이 없다.
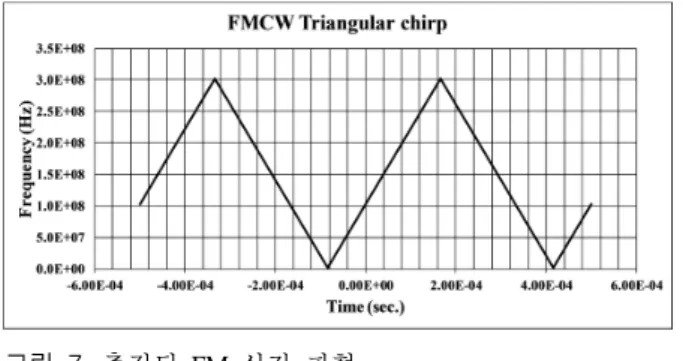
그림 7에 선형성 측정 결과를 나타내었고, 그림 8에는 계산된 integral nonlinearity로 0.01 % 이내이다.
그림 9에 Ku-band의 반송 주파수에서 측정된 송신부의 위상잡음 측정 결과를 나타내었다.
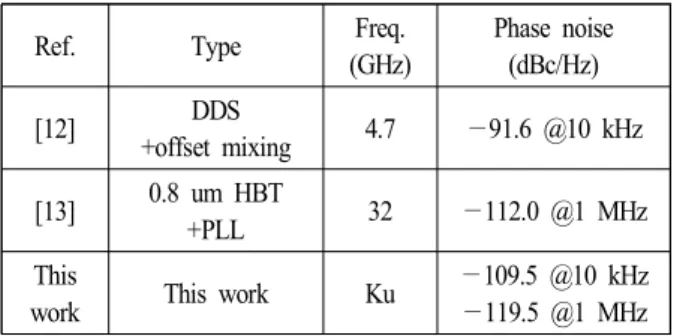
표 1에 타 논문과 위상잡음의 성능 비교를 하였다.
표 1과 같이 Ku-band 측정된 위상잡음은 —109.5 @10 kHz,
—119.5 @1 MHz로 매우 우수함을 볼 수 있다.
그림 7~9의 결과로부터 DDS를 사용하여 0.01 % 이내 의 선형성을 얻었고, Ref_CLK를 위상 고정 루프의 옵셋
그림 7. 측정된 FM 삼각 파형
Fig. 7. Measured FM triangular waveform.
그림 8. 비선형성 계산 결과
Fig. 8. Calculated integral nonlinearity.
그림 9. 측정된 위상 잡음 Fig. 9. Measured phase noise.
주파수로 사용하여 매우 우수한 위상잡음 특성을 가짐을 확인하였다. 따라서 고고도 측정 오차가 작고, 수신기의 수신 감도를 저하시키지 않는 특성을 갖는다.
Ⅴ. 결 론
본 논문에서 제안한 주파수 변조 연속파(FMCW) 레이 더 고도계의 설계 방안은 경량, 소형 및 저 손실의 장점을
표 1. 측정된 위상잡음 성능비교
Table 1. Comparison with previously published results.
Ref. Type Freq.
(GHz)
Phase noise (dBc/Hz)
[12] DDS
+offset mixing 4.7 —91.6 @10 kHz [13] 0.8 um HBT
+PLL 32 —112.0 @1 MHz This
work This work Ku —109.5 @10 kHz
—119.5 @1 MHz
갖는 광 지연을 사용하여 충분한 연장 길이를 제공함으 로써, 측정하고자 하는 고도 범위가 넓어진다. 제안된 기 법은 펄스 폭 제한 및 RF 소자의 대역폭 제한 등의 문제 점을 해결할 수 있으므로, pulse 및 FMCW 변조 방식 모 두에 적용이 가능하다. 또한, 송신 전력과 수신단 이득을 고도에 따라 제어하는 기법으로 넓은 고도 측정 범위를 얻도록 하였다.
변조 대역폭을 가변하여 좁은 수신 대역폭으로 넓은 고도 범위를 측정할 수 있게 하여 수신 대역폭에 비례하 여 증가하는 노이즈를 줄이고, 안테나 커플링에 의한 원 치 않는 신호를 억제할 수 있도록 하였다. 또한, 송신단의 광 지연 모듈은 기적 대역의 누설 잡음의 영향을 회피할 수 있게 하여 수신 감도를 향상시켰다.
더불어, DDS를 사용하여 0.01 % 이내의 우수한 선형성 과 Ref_CLK을 PLL의 옵셋 주파수로 사용하여 —119.5 dBc/Hz@1 MHz의 우수한 위상잡음으로 고도 측정 오차 를 최소화하였다.
References
[1] D. Cailliu, V. Zlotnicki, "Precipitation detection by the TOPEX/Poseidon dual frequency radar altimeter, TOPEX microwave radiometer, special sensor microwave/imager and climatological shipboard reports", IEEE Trans. Geo- sci. Remote Sens., vol. 38, no. 1, pp. 205-213, Jan. 2000.
[2] G. D. Quartly, "Optimizing information from the Ja- son-2 altimeter", IEEE Geosci. Remote Sens. Lett., vol. 6, no. 3, pp. 398-402, Jul. 2009.
[3] P. A. M. Berry, R. G. Smith, M. K. Salloway, and J.
Benveniste, "Global analysis of EnviSat burst echoes over inland water", IEEE Trans. Geosci. Remote Sens., vol. 50, no. 5, pp. 1980-1984, May 2012.
[4] G. Alberti, L. Festa, C. Papa, and G. Vingione, "A wave- form model for near-nadir radar altimetry applied to the Cassini mission to Titan", IEEE Trans. Geosci. Remote Sens., vol. 47, no. 7, pp. 2252-2261, Jul. 2009.
[5] N. Galin, A. Worby, T. Markus, C. Lueschen, and P.
Gogineni, "Validation of airborne FMCW radar measu- rements of snow thickness over sea ice in Antarctica", IEEE Trans. Geosci. Remote Sens., vol. 50, no. 1, pp.
3-12, Jan. 2012.
[6] H. E. Bingol, B. Akin, and O. KOC, "Radar altimeter as a navigation aid using hierarchical elevation map clus- tering", in Proc. IEEE Position Location and Navigation Symp., pp. 377-381, 2012.
[7] J. L. Campbell, M. U. de. Haag, "Assessment of radar altimeter performance when used for integrity monitoring in a synthetic vision system", in Proc. 20th Digital Avionics Systems, vol. 1, Oct. 2001.
[8] J. W. Joyce, "Radar Altimeter", U. S patent 6,992,614, Jan. 2006.
[9] H. D. Griffiths, "New ideas in FM radar", Electron. Co- mmun. Eng. J., vol. 2, no. 5, pp. 185-194, Oct. 1990.
[10] P. D. L. Beasley, "The influence of transmitter phase noi- se on FMCW radar performance", European Microw.
Conf. Proc., pp. 331-334, Sep. 2006.
[11] K. Lin, Y. E. Wang, C. K. Pao, and Y. C. Shih, "A Ka-band FMCW radar front-end with adaptive leakage cancellation", IEEE Trans. Microw. Therory and Tech., vol. 54, no. 12, pp. 4041-4048, Dec. 2006.
[12] J. H. Choi, M. S. Kim, S. H. Shin, and Y. G. Yang,
"Low phase noise S-band PLL frequency synthesizer using DDS and offset mixing techniques", Asia-Pacific Microw. Conf. Proc., pp. 1409-1412, Dec. 2009.
[13] X. Gai, G. Liu, S. Chartier, A. Trasser, and H. Schu- macher, "A PLL with ultra low phase noise for milli- meter wave applications", European Microw. Conf. Proc.
pp. 69-72, Sep. 2010.
최 재 현
1995년 2월: 충남대학교 전자공학과 (공학 사)
1997년 2월: 충남대학교 전자공학과 (공학 석사)
2014년 2월: 충남대학교 전자전파정보통 신공학과 (공학박사)
1998년 3월~현재: 국방과학연구소 [주 관심분야] Proximity Fuze, Altimeter, Short-Distance Radar 등
장 종 훈
2004년 8월: 포항공과대학교 전자전기공 학과 (공학사)
2007년 2월: 포항공과대학교 정보통신대 학원 (공학석사)
2007년 1월~2011년 10월: LG전자 MC연 구소 주임연구원
2011년 11월~현재: 국방과학연구소 [주 관심분야] 안테나 설계, FMCW 레이더 설계 등
노 진 입
1984년 2월: 울산대학교 전기공학과 (공학 사)
1993년 2월: 충남대학교 전자공학과 (공학 석사)
2007년 8월: 충북대학교 전파공학과 (공학 박사)
1984년 3월~현재: 국방과학연구소 [주 관심분야] 파형 신관, 간섭계 고도계, 레이더 등