RTF 필터링을 이용한 모바일매핑시스템 레이저 데이터의 도로 장애물 제거에 관한 연구
A Study for Removing Road Shields from Mobile Mapping System of the Laser Data using RTF Filtering Techniques
1)
송현근*ㆍ강병주**ㆍ이성훈***ㆍ최윤수****
Song, Hyun KunㆍKang, Byoung JuㆍLee, Sung HunㆍChoi, Yun Soo
要 旨
현재 전 세계적으로 환경보전이나 석탄자원 고갈 등의 문제로 인해 친환경 자동차의 개발이 매우 중요한 이슈로 대두되고 있으며, 이에 따라 고정밀 3차원 도로 지도제작에 많은 관심을 기울이고 있는 추세이다. 이와 같은 목적 의 달성을 위해 현재까지 MMS을 이용한 데이터 획득 방법이 가장 효과적인 것으로 보고되고 있다. 이를 위해 본 연구에서는 항공 레이저 측량 데이터에 대한 처리를 목적으로 개발된 기본적인 RTF 필터 알고리즘을 MMS에 적 합하도록 수정하여 적용하였다. 실험을 통해 도출된 정량적 분석 결과 지면은 99.71%, 비지면은 99.95%의 매우 높 은 제작자 정확도를 나타내고 있으며, 도로 내에 존재하는 자동차, 가로수, 중앙분리대 등의 도로 장애물이 효과적 으로 제거된 결과가 도출되었다. 이를 통해 실무 작업에 효과적인 적용 및 작업 효율성 향상을 기대할 수 있을 것 으로 판단된다.
핵심용어 : 수치표고모델, MMS, RTF 필터
Abstract
It is a global trend to give attention to generating precise 3D navigation maps since eco-friendly vehicles have become a critical issue due to environmental protection and depletion of fossil fuels. To date, Mobile Mapping System (MMS) has been a efficient method to acquire the data for generating the 3D navigation maps. To achieve this goal so far in the Mobile Mapping System using the data acquisition method has been proposed to be most effective. For this study the basic RTF filter algorithm was applied to modify to fit MMS quantitative analysis derived floor 99.71%, 99.95% of the highly non-producers to maintain accuracy and high-precision 3D road could create DEM. In addition, the roads that exist within the cars, roadside tree, road cars, such as the median strips have been removed to shields it takes to get results effectively, and effective in practical applications and can be expected to improve operational efficiency is considered.
Keywords : DEM, MMS(Mobile Mapping System), RTF(Recursive Terrain Fragmentation)
1. 서 론
현재 자동차 제조사에서는 차선 이탈경보, 차선 변경 지원, 졸음운전방지 등의 첨단 운전자 지원시스템 (Advanced Driver Assistance System)의 개발을 위한 3차원 도로 지도제작에 많은 관심을 기울이고 있다. 지
금까지 그 방안으로 레이저 스캐너 데이터를 이용한 3 차원 도로 지도제작이 효과적인 방법으로 대두 되고 있 다. 특히, 차량항법시스템 등과 같은 다양한 분야에서 3 차원 도로 지도제작 필요성이 증대됨에 따라 LiDAR 데이터를 이용한 지면 필터링 알고리즘 연구 및 도로 모델링에 관한 연구가 활발하게 이루어지고 있다.
2011년 9월 21일 접수, 2012년 2월 3일 채택
* 정회원ㆍ서울시립대학교 공간정보공학과 석사과정([email protected])
** 교신저자ㆍ서울시립대학교 도시과학대학원 공간정보공학과 석사([email protected])
*** (주)지온텍코리아 대표이사([email protected])
**** 정회원ㆍ서울시립대학교 공간정보공학과 교수([email protected]) 연구논문
작성함으로써 지역적인 경사의 경향을 파악하여 필터 링의 추가조건으로 적용하는 방법이다. 이를 통해 급격 한 경사지에 대한 분류효율을 개선하는 성과를 거두었 지만 Cell의 크기에 매우 민감하다는 한계를 나타낸다.
Axelsson(2001)은 복잡한 도심지의 지면점 추출을 위해 Adaptive TIN 모델의 사용을 제안하였다. 이 방 법은 일정 크기로 분할된 각각의 영역에서 최저점을 추 출하여 초기 지표면 TIN을 구성한 후, 일정 높이 기준 이내의 점들을 연속적으로 지면점에 추가함으로써 지 표면을 세분화해가는 방식이다. 따라서, 단절된 표면에 대해 상대적으로 높은 정확도를 나타내지만 각각의 TIN에 포함되는 지면점이 적을 경우 오류 발생 가능성 이 높다는 문제점을 가지고 있다.
도로의 추출 및 DEM 생성과 관련하여 김준철(2003) 은 MMS에 탑재된 LiDAR 자료를 이용하여 도로면에 대한 정밀한 3차원 수치표고모델을 제작하는 방법에 대해 연구를 수행하였다. 또한, Hatger(2003)와 Brenner(2003)는 차량항법용 수치지도의 도로 중심선 과 도로의 종단경사정보를 이용하여 LiDAR 데이터에 서 도로 지역만을 자동으로 영역 분할하는 연구를 수행 하였으며, 이를 통해 기존의 영역분할 알고리즘에 비해 평탄한 지역에서도 비교적 정확하게 도로경계를 추출 하는 결과를 도출하였다.
Pannaik(2003)는 LiDAR 데이터를 이용하여 도로의 종단경사와 횡단경사 정보를 추출하는 연구를 수행하 였다.
그러나, 지금까지 수행된 연구들은 대부분 항공 LiDAR 데이터에 대한 지면/비지면 필터링과 도로에 대한 3차원 정보 추출을 목적으로 이루어졌으며, 지상 LiDAR 데이터에 대한 필터링 시 결과 정확도가 저하 된다는 한계점을 내포하고 있다.
따라서, 본 연구에서는 MMS를 이용하여 획득된 LiDAR 데이터를 이용하여 도로 상에 존재하는 다양한 형태의 차폐물들을 효과적으로 제거하기 위하여 RTF(Recursive Terrain Fragmentation) 필터 알고리즘
정량적으로 비교 평가하고, 실무에의 적용 가능성 및 정확도를 검증하는데 본 연구의 목적이 있다.
2. 연구방법 및 범위
2.1 연구범위
본 연구에서는 항공 LiDAR 데이터의 처리를 목적으 로 개발된 RTF 필터 알고리즘을 MMS를 통해 획득된 지상 LiDAR 데이터의 처리에 적용하여 그 정확도 및 효율성을 검증하고자 한다. 이를 위해 지상 LiDAR 데 이터의 특성을 분석하고, 분석결과를 토대로 기존의 RTF 필터에 적용되는 다양한 필터 파라미터들을 수정 적용하였으며, 그 결과에 대해 그림 1과 같은 방법으로 정확도 평가를 수행하였다.
2.2 연구에 적용된 RTF 필터의 원리
본 연구에서 사용한 RTF 필터는 아무리 복잡한 지형 의 경우라도 매우 좁은 영역으로 분할해나가면 결국 균 질한 특성을 갖는 평면들의 조합으로 표현할 수 있다는
그림 1. 본 연구결과 도출된 RTF 필터의 성능 평가방법
그림 2. RTF 필터를 이용한 지면점 추출 과정
※ shon & Dowman, 2007
가정을 전제로 한다. 이와 같은 균질한 단위 평면을 평 면지형모델(PTM)이라고 정의하며, 필터링 과정을 통 해 지면점을 추출한 후 이를 기반으로 연속적인 평면지 형모델을 구성하는 것을 최종적인 목표로 한다.
이를 위해 기본적으로 전체 대상지역을 일정영역으 로 분할한 후, 이 영역 내에서 가장 낮은 점들을 이용하 여 TIN을 구성함으로써 개략적인 초기 지표면을 가정 한다. 일단 초기 지표면이 생성되면 전체 데이터에 대 해 점차 세분화하면서 해당 지역의 특성에 적합한 기준 에 따라 지면점을 분류해나가는 Corse-to-Fine 방식을 적용하고 있다.
RTF 필터를 이용한 지면점 추출과정은 그림 2에 나 타나있는 바와 같이 크게 DTF(Downward Terrain Fragmentation)와 UTF(Upward Terrain Fregmenta- tion)의 두 가지 과정으로 구성된다.
DTF는 초기 지형모델의 생성을 목적으로 하는 과정 으로서 Corse-to-Fine 기법을 기반으로 이루어진다. 전 체 대상지역에 대해 개략적인 평면지형모델을 구성한 후, 각각의 평면지형모델 내에 포함되는 점들 중 지면 아래에 존재하는 점들에 대해 연속적인 분할을 수행해 감으로써 평면지형모델을 세분화한다.
DTF에 의해 생성된 최종적인 PTM은 지면점으로만 구성되어 있지만, 상당수의 지면점을 비지면점으로 오 분류하는 문제로 인해 지표면의 다양성이나 세밀도를 정확히 표현하지 못한다는 단점을 나타낸다. 이와 같은 문제의 해결을 위해서는 비지면점으로 오분류된 점들
그림 3. DTF를 통한 지면점 추출 과정
을 지면점으로 복원해주는 과정이 필요하며, 이와 같은 과정을 UTP라고 정의한다.
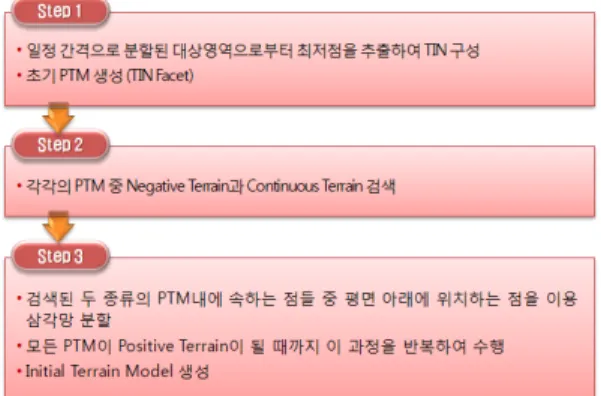
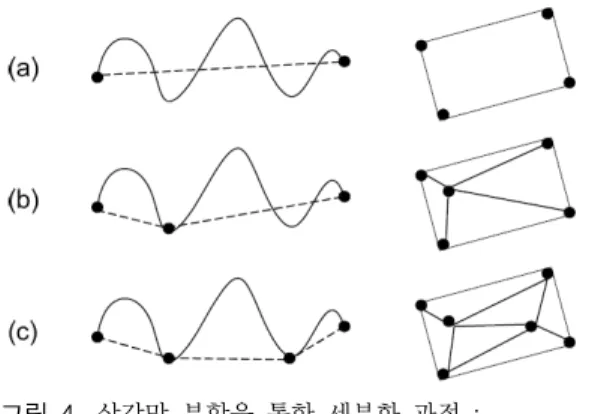
2.2.1 DTF 필터를 이용한 지면점 추출방법 DTF를 이용하여 지면점을 추출하는 과정은 그림 3 에 나타나있는 바와 같이 크게 초기 평면지형모델 생 성, 해당 지형모델 검색, 삼각망 분할을 통한 지형모델 세분화 등의 세 단계를 반복하여 수행함으로써 이루어 진다.
초기 평면지형모델(PTM) 생성과정은 DTF의 가장 초기 단계로서 필터링을 수행하고자 하는 전체 대상지 역을 일정 간격의 격자로 분할한 후, 분할된 각각의 영 역으로부터 최저점만을 추출하여 TIN을 구성함으로써 초기 평면지형모델을 생성한다.
일단 초기 평면지형모델이 생성되면 각각의 평면지 형모델 중 초기 평면지형모델의 아래 부분에 점들이 분 포하고 있는 지형모델을 검색한다. 이와 같은 지형모델 은 지면점으로 분류될 가능성이 높은 영역이라고 할 수 있으며, 따라서 이들 지형모델의 검색은 결과적으로 지 면점이 존재할 수 있는 영역에 대한 추출이라는 의미를 갖는다.
이와 같은 과정을 통해 해당 지형모델이 검색되면, 각 평면지형모델 내에 존재하는 점들 중 평면 아래에 위치하고 있는 점을 지면점으로 추가해줌으로써 삼각 망을 분할한다. 만약 동일한 평면지형모델 내에 평면 아래에 위치하고 있는 점이 여러 점 존재할 경우 평면 에 가장 가까이 위치한 점 하나만을 지면점으로 추가하 여 분할을 수행한다.
일단 삼각망 분할을 통해 평면지형모델이 세분화되 면 이들에 대해 다시 평면지형모델의 아래 부분에 점들 이 분포하고 있는 지형모델에 대한 검색이 이루어지며, 이와 같은 과정을 더 이상 대상 지형모델이 존재하지
그림 4. 삼각망 분할을 통한 세분화 과정 :
(a) 초기 평면지형모델, (b) DTF의 중간 분할 결과, (c) DTF를 통한 최종 세분화 결과
※ sohn & Dowman, 2007
않을 때까지 지속적으로 반복해줌으로써 최종적인 초 기 지형모델(Initial Terrain Model)을 생성하게 된다.
그림 4는 이와 같은 평면지형모델의 세분화 과정을 모 식적으로 보여준다.
2.2.2 UTF를 이용한 지면점 복원방법
DTF 과정을 통해 추출된 지면점들을 이용하여 TIN 을 구성함으로써 초기 지형모델을 생성할 수 있으며, 이때 각각의 TIN Facet 내부에는 일반적으로 여러 개 의 데이터 점들이 존재하게 된다. 일단 이 점들은 비지 면점으로 인식되고 있으나 실제적으로는 이들 중에 지 면점들도 함께 포함되어 있으며, 이를 효과적으로 재분 류하여 지면점으로 복원하는 것이 UTF 과정의 핵심적 인 처리과정이라고 할 수 있다.
이와 같은 지면점으로의 재분류를 위하여 그림 5와 같은 사면체 모델이 적용된다. 그림에 나타나있는 바와
그림 5. 사면체 모델의 구성을 통한 지면점 복원의 기 본 원리
※ sohn & Dowman, 2007
그림 5(b) 및 그림 5(c)와 같이 TIN Facet을 구성하는 3개의 점들과 새롭게 적용된 후보점 사이의 각도나 평 면까지의 수직거리를 계산하여 지면점 여부를 결정하 게 된다.
이와 같은 과정을 하나의 TIN Facet 내의 모든 점들 에 대해 수행함으로써 지면점 복원을 수행하게 되며, 모 든 Facet에 대해 더 이상 만족하는 점들이 없을 때까지 반복해줌으로써 최종적인 지형모델을 생성할 수 있다.
이와 같은 지면점 복원과정에 있어서 어떤 후보점을 지면점으로 복원할 것인가를 판단하는 결정조건의 선 택이 매우 중요한 요소가 된다. RTF 필터는 지면점 복 원을 위한 결정조건으로 지형극성(Terrain Polarity)이 라는 개념을 도입하여 사용하며, 그림 6에 나타나있는 바와 같이 기본적으로 개별 TIN Facet을 구성하는 3개 의 점들과 그 내부의 후보점 사이의 각도로 정의된다.
그림 6(a)와 같이 TIN Facet 평면과 후보점들 사이의 각도가 기준 각도 이하인 경우 지면점으로 판단할 수 있으며, 그림 6(b)와 같이 기준 각도를 벗어나는 경우 비지면점으로 분류된다.
하지만, 각도의 기준을 어떻게 설정할 것인가에 따라 결과에 큰 차이가 발생하므로 이에 대한 결정이 가장 중요한 문제로 대두된다.
결과적으로 지형극성의 개념을 이용한 UTF의 지면 점 복원 과정은 개별 TIN Facet 내의 모든 후보점들에 대해 지형극성을 계산한 후, 최적의 분포를 갖는 사면 체 모델을 결정하는 과정이라고 할 수 있으며, 이와 갖 은 분포의 효과적인 결정을 위해 MDL (Minimum Description Length) 방법이 적용된다.
MDL 방법(Rissanen, 1984)은 각각의 사면체 모델에 대한 지형극성을 통계평면 상에서 일종의 정보거리 (Information Length)로 환산해주는 것으로 이 값이 가 장 적은 것이 최적의 지형모델로 결정된다. 일단 MDL 방법을 통해 최적의 사면체 모델이 결정되면 이 사면체 를 구성하는 신규 지면점을 이용하여 델루니 삼각형을 구성함으로써 지형모델을 세분화하게 되며, 이 과정을
그림 7. MMS를 통해 획득된 지상 LiDAR 데이터의 형태
모든 평면지형모델(PTM)이 동일한 경사를 갖게 될 때 까지 반복해줌으로써 최종적인 결과를 도출할 수 있다.
2.3 지상 LiDAR 데이터의 특징
MMS를 통해 획득된 LiDAR 데이터는 일반적인 항 공 LiDAR 데이터와 동일한 원리를 통해 생성되지만, 촬영방식 및 탑재체의 차이로 인해 몇 가지 서로 상이 한 특성을 나타내게 된다.
2.3.1 데이터 형태
항공 LiDAR 데이터와 지상 LiDAR 데이터 사이에 서 나타나는 가장 큰 차이점 중 하나는 탑재체의 차이 로 인해 획득되는 데이터의 형태가 많이 달라진다는 점 이다. 항공 LiDAR 데이터가 지형지물의 윗면에 대한 정보를 주로 나타낸다는 점에 비해 MMS를 통해 획득 된 지상 LiDAR 데이터는 차량에서 거의 수평방향에 가깝게 스캐닝을 수행하므로 그림 7에서 볼 수 있는 바 와 같이 지형지물의 옆면에 대한 정보를 함께 포함하고 있다는 특징을 갖는다.
이와 같은 특징으로 인하여 도로 내에 존재하는 차량 이나 구조물 등의 옆면이 지면과 함께 스캐닝되어 나타 나게 되며, 특히 이들 옆면을 구성하는 점들이 실제 지 면점들과 매우 인접하여 연속성을 갖고 존재하게 된다 는 점에서 지형필터를 이용한 분류 시 많은 어려움을 발생시키게 된다.
2.3.2 음영지역의 과다한 발생
차량에서 수평으로 스캐닝하는 MMS의 구조적인 특 징은 도로 주변에 존재하는 차폐물의 영향으로 인해 음 영지역을 과도하게 발생시킨다는 문제점을 나타낸다.
항공 LiDAR 데이터의 경우에도 높은 건물의 후면 등은 데이터 획득이 어려워 음영지역으로 발생하기도 하지만, 모바일 매핑시스템의 경우 그림 8에서 볼 수 있듯이 그 영역이 너무 광범위하다는 문제점을 갖는다.
그림 8. MMS 데이터에 나타나는 음영지역
도로 내에 존재하는 차량이나 도로 주변의 구조물 건물 등의 차폐로 인해 도로 내부에 음역지역이 발생하고 있 는 것을 볼 수 있으며, 특히 도로에서 벗어난 외곽지역 은 데이터가 거의 획득되지 않고 있음을 볼 수 있다. 이 와 같은 특징은 데이터의 분포나 전체적인 커버리지의 형태를 매우 불규칙적으로 만들게 되므로 자료처리 시 음영지역에 대한 효과적인 보간방법의 적용이 매우 중 요한 문제로 대두되게 된다.
2.3.3 높은 점 밀도
MMS를 통해 획득된 데이터가 갖는 또 하나의 대표 적인 특성은 항공 LiDAR 데이터에 비해 점 밀도(Point Density)가 매우 높다는 점이다. 국토해양부 국토지리 정보원이 고시한 “항공레이저측량작업규정”에 의하면 1m급의 수치표고모델을 제작하기 위해서는 최소 2.5점 /m2 이상의 점 밀도를 가져야 한다고 규정하고 있으며, 실제적인 촬영에서도 통상적으로 단위 면적 당 5~6점 정도의 데이터를 획득하고 있다.
그러나, 모바일 매핑시스템을 통해 획득된 데이터는 촬영거리가 매우 짧다는 점에서 단위 면적 당 최소 수 십 점 이상의 점 밀도를 나타내고 있으며, 이와 같이 조 밀한 점의 분포는 전체적인 데이터 용량의 증가를 가져 옴으로 인해 데이터 처리 시 많은 문제점을 발생시키게 된다.
2.4 본 연구에서의 적용방법
RTF 필터 알고리즘은 앞에서 언급한 바와 같이 항공 LiDAR 데이터에 대한 필터링 시 반복적인 연산을 통 해 도심지 지역과 같은 복잡한 지형에 대해 보다 정확 한 결과를 도출할 수 있다는 장점을 가지고 있다.
그러나, 본 연구에서 적용하고자 하는 MMS 데이터 의 경우 지면에서 수직으로 데이터를 취득하기 때문에 도로 상에 존재하는 차량이나 기타 구조물들이 그림 9 와 같이 지면과 연결되어 연속적으로 관측된다는 특징 을 나타낸다.
으로써 초기 지형모델을 구성하는 DTF 과정에서 비지 면점을 지면점으로 오분류하는 문제가 발생할 수 있으 며, 이는 전체적인 분류 정확도에 심각한 오류를 가져 올 수 있다.
이러한 문제점들의 해결을 위하여 본 연구에서는 DTF 과정을 통해 구성되는 초기 지형모델의 TIN Facet 크기 및 점들 간의 높이차에 대한 제약조건을 다 양한 테스트를 통해 표 1과 같이 수정하여 적용하였다.
즉, 일정 크기 이하의 TIN Facet에 대해 제한을 둠으로 써 초기 지형모델의 생성 시 차량 등 지면과 연속적으 로 연결된 구조물들이 지면점으로 분류되는 오류를 방 지하였으며, 향후 UTF 과정을 통해 그 결과 세밀도를 향상시키도록 구성하였다.
이 표에서 항공 LiDAR에 대한 파라미터는 Sohn (2008)이 도심지역에 대해 최적의 파라미터로 제시한 값 이며, 각각의 파라미터들은 다음과 같은 의미를 갖는다.
κ는 초기 지형모델을 구성하는 TIN Facet의 크기에 대한 제약조건이며, δ는 그림 10과 같이 개별 TIN Facet 내에 존재하는 점들에 대해 지면점 여부를 판단 하기 위한 높이차에 대한 제약조건을 나타낸다.
RTF 필터를 통해 평면지형모델을 구성하는 경우 지
구분 κ δmin δmax α β
항공 LiDAR 10m 0.5m 1m 45° 45°
지상 LiDAR 0.5m 0.05m 0.1m 45° 45°
표 1. RTF 필터링 파라미터
그림 10. 지면점 결정을 위한 높이차 제약조건
※ sohn & Dowman, 2007
TIN Facet을 구성하는 세 변 중 가장 긴 변의 길이를 나타내고, δh는 지면점과 비지면점을 판단하는 높이차 기준을 나타낸다. 따라서, 이들 파라미터에 대한 설정 을 통해 평면지형모델의 크기 변화에 따른 영향을 최소 화시켜 줄 수 있게 된다.
표 1에 나타나있는 α와 β는 MDL 방법을 통해 최적 의 사면체 모델을 결정하기 위한 정규확률분포의 파라 미터이며, 본 연구에서는 항공 LiDAR 데이터와 동일 한 값을 적용하였다.
3. 실험 및 검증
3.1 실험방법
본 연구를 통해 도출된 RTF 필터의 성능을 객관적으 로 평가하기 위하여 MMS로부터 획득된 도로영역의 LiDAR 데이터에 시험 적용하였으며, 앞에서 제시한 그림 1과 같은 방법으로 정확도를 평가하였다.
실험결과의 정량적 평가를 위해 실험 데이터에 대한 수동처리를 통하여 Reference 데이터를 제작한 후 도 로영역에 해당하는 부분만을 추출하여 정확도 검증을 위한 기준 데이터로 설정하였다. 이 기준 데이터와 본 연구를 통해 결정된 RTF 필터 알고리즘의 결과를 비교 함으로써 오차행렬(Error Matrix)을 결정하으며, 최종 적으로 오차행렬의 분석을 통해 정량적이고 객관적인 정확도 평가를 수행하였다. 또한, 국내에서 가장 많은 사용빈도를 보이고 있는 TerraScan 상용 소프트웨어 (Terrasolid사, 핀란드)의 필터링 결과와 정확도를 정량 적으로 비교함으로써 실무에서의 적용가능성을 평가하 였다.
그림 11. 실험에 사용된 MMS 장비의 구성 형태
구분 제원 구분 제원
거리측정 정확도 8mm 최소스캔각도 0.005°
정밀도 3mm Pulse Rate 50만 point/sec
위치 정확도 (POS LV
520)
Roll/
Pitch 0.005 스캐너
회전속도 초당 200회 Heading 0.015 최대 유효
거리 200m
X,Y 2cm 관측시야 360°
Z 5cm - -
표 2. 실험 장비의 제원
점 개수 점 밀도 도로 연장길이 데이터의 크기 10,764,264 82.330개/m2 약 450m 210,240KB 표 3. 실험 데이터의 제원
3.2 실험 데이터
본 연구에서는 현대엠엔소프트사에서 고정밀 3차원 도로 지도제작을 목적으로 도입한 MMS 장비(Optech 사, 캐나다)를 이용하여 획득된 도로영역의 LiDAR 데 이터를 이용하였다.
세부적인 장비의 제원은 표 2에 나타나 있는 바와 같 으며, 이를 통하여 획득된 실험 데이터의 제원은 표 3 과 같다.
3.3 실험 대상지역
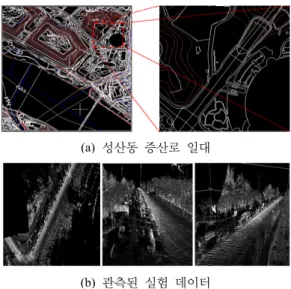
실험 대상지역은 정확한 시험결과 도출을 위해 그림 12와 같이 비교적 차량의 흐름이 원활하고 도로 주변 시설물 등이 다양하게 존재하고 있는 상암 월드컵 경기 장(서울특별시 마포구 성산동) 부근 증산로 일부 구간 (약 450m)을 선정하였다.
3.4 실험결과 및 분석 3.4.1 지면점 추출 결과
본 연구를 통해 도출된 RTF 필터 알고리즘을 실험 데이터에 적용하여 지면점을 분류한 결과는 그림 13에 나타나 있는 바와 같다.
(a) 성산동 증산로 일대
(b) 관측된 실험 데이터 그림 12. 실험 대상지역 및 데이터 형태
(a) 필터링 이전의 형태 (b) RTF 필터 결과 그림 13. 지면점 추출 결과
이 결과에 의하면 전체 10,764,264개의 LiDAR 데이 터 중 약 2.7%인 281,858개의 점이 지면점인 것으로 확인 되었으며, 나머지 대다수의 데이터는 비지면으로 분류되고 있다.
(a) 필터링 이전
(b) 필터링 이후 그림 14. RTF필터 알고리즘을 이용한 지형지물 제거
결과
(a) 필터링 이전 (b) 필터링 이후 그림 15. RTF 필터 알고리즘을 이용한 도로 내 차량
제거 결과
(a) 필터링 이전
(b) 필터링 이후 그림 16. RTF 필터 알고리즘을 이용한 구조물 제거 결과
육안 상의 정성적 평가를 수행하는 경우에도 차량, 가로수, 가로등, 보행자 등으로 인해 복잡한 양상을 나 타내던 DSM의 형태가 비지면점들이 효과적으로 제거 됨에 따라 상당히 양호한 형태의 DEM 형태로 변화되 었음을 확인할 수 있다.
3.4.2 정확도 분석
실험 결과에 대한 정량적인 정확도 분석을 수행하기 위해 그림 17에 나타나있는 기준 데이터와 비교/분석을 수행하였다. 기준 데이터와 동일한 도로 영역을 추출한 후 대상 지역 내의 모든 점 데이터(8,908,341개)에 대 해 비교하여 그 차이에 대한 오차 행렬을 표 4와 같이 결정하였다.
이 결과에 의하면 193,760개의 실제 지면 점 중 99.71%인 193,204개의 점이 RTF 필터 알고리즘에 의해 지면점으로 정확히 분류되었으며, 556개의 점만이 비지 면점으로 오분류되었음을 알 수 있다. 반면에 4,316개의
의 형태
Reference Data
계 사용자
정확도
지면 비지면
RTF 결과
지면 193,204 4,316 197,520 97.81%
비지면 556 8,710,265 8,710,821 99.99%
계 193,760 8,714,581 8,908,341 -
제작자 정확도 99.71% 99.95% - -
표 4. RTF 필터의 지면점 분류결과에 대한 오차행렬
점들은 비지면점을 지면점으로 오분류함에 따라 97.81%의 사용자 정확도를 나타낸다. 오차행렬의 분석 을 통해 지면과 비지면점들에 대한 전체적인 분류정확 도는 99.95%의 매우 높은 값을 나타내고 있으며, Kappa 계수 역시 0.9995의 값을 갖는 것으로 계산되었다.
3.4.3 기존 상용 소프트웨어와의 결과 비교 및 분석 본 연구의 객관적인 평가를 수행하기 위하여 현재 국 내에서 가장 많은 사용 빈도를 나타내고 있는 핀란드 Terrasolid사의 TerraScan v8.0 상용 소프트웨어를 사 용하여 기준 데이터와 동일한 방식으로 비교/분석을 수 행하였다. 그림 18에서와 같이 정성적으로 비교한 결과 거의 유사한 형태를 나타내고 있음을 알 수 있으나, 도 로 내 일부 지역에서 TerraScan의 필터 결과 중 일부가 지면점이 오분류되고 있음을 확인할 수 있다. 또한, 표 5의 TerraScan의 결과에 대한 오차행렬과 표 6의 정확 도 비교 분석에서 나타나있는 바와 같이 RTF 필터 알고 리즘의 성능이 상대적으로 우수한 것으로 분석되었다.
기준 데이터와의 정량적인 비교를 통해 도출된 오차 행렬에 의하면 전체 193,760개의 실제 지면 점 중 94.96%인 183,988개의 점이 TerraScan 소프트웨어에 의해 지면점으로 정확히 분류되었으며, 9,772개의 점만 이 비지면점으로 오분류되었음을 알 수 있다. 반면에 550,852개의 점들은 비지면점을 지면점으로 오분류함 에 따라 25.04%의 사용자 정확도를 나타낸다.
(a) TerraScan을 통한 지면 점 분류결과
(b) RTF 필터를 통한 지면 점 분류결과
그림 18. RTF와 TerraScan 필터링 결과 비교
Reference Data
계 사용자
정확도
지면 비지면
RTF 결과
지면 183,988 550,852 734,840 25.04%
비지면 9,772 8,163,729 8,173,501 99.88%
계 193,760 8,714,581 8,908,341 - 제작자
정확도 94.96% 93.68% - -
표 5. TerraScan의 지면점 분류결과에 대한 오차행렬
오차행렬의 분석을 통해 지면과 비지면점들에 대한 전체적인 분류정확도는 93.71%의 값을 나타내고 있으 며, Kappa 계수 역시 0.9371의 값을 갖는 것으로 계산 되었다. 이와 같은 결과는 RTF 결과와 비교했을 때, 전 체적으로 약 6.24% 정도의 차이를 보이는 것을 알 수 있다. 세부적인 개별 항목에 대한 TerraScan과 RTF의 정확도 차이는 표 6에 나타나있는 바와 같다.
표 6에 의하면 RTF 알고리즘을 이용한 분류정확도 가 TerraScan 소프트웨어를 이용한 결과에 비해 모든 항목에서 약 5~6% 정도 우수한 것으로 분석되고 있지 만, 지면점에 대한 사용자 정확도의 경우 유난히 매우 큰 차이를 나타냄을 알 수 있다. 이는 TerraScan 소프 트웨어를 이용하여 지면점을 분류하는 경우 전체 8,908,341개의 점 중 약 8.3%에 해당하는 734,840개의 점이 지면점으로 분류되기 때문에 나타나는 현상이며, 실제 기준 데이터에 포함되어 있는 지면점의 수가
항목 RTF TerraScan
사용자 정확도
지면 97.81% 25.04%
비지면 99.99% 99.88%
제작자 정확도
지면 99.71% 94.96%
비지면 99.95% 93.68%
전체 정확도 99.95% 93.71%
Kappa 계수 0.9995 0.9371 표 6. RTF와 TerraScan의 지면점 분류결과 정확도 비교
193,760개에 불가하다는 점에서 매우 큰 오분류 값을 나타낸다고 할 수 있다.
4. 결 론
본 연구는 항공 LiDAR 데이터에 대한 지면/ 비지면 필터링을 목적으로 개발된 RTF(Recursive Terrain Fragmentation) 필터 알고리즘을 기반으로 MMS에서 획득한 데이터에 효과적으로 적용할 수 있도록 수정하 여 적용하였다.
수정된 RTF 필터 알고리즘을 이용하여 분류된 결과 를 기준 데이터와 정량적으로 비교한 결과 지면의 경우 99.71%, 비지면의 경우 99.95%의 매우 높은 제작자 정확도를 나타내는 것으로 분석되었다. 또한, 현재 가 장 많은 사용 빈도를 보이고 있는 상용 소프트웨어인 TerraScan(TerraSolid사, 핀란드) 소프트웨어를 이용하 여 도출된 결과와의 비교에서도 약 6% 정도 높은 정확 도를 나타내고 있다. 육안 판독에 기반한 정성적인 평 가에서도 도로 내에 존재하는 자동차, 가로수, 중앙분 리대 등 대부분의 차폐물이 효과적으로 제거된 결과가 도출되고 있음을 확인할 수 있었다.
이와 같이 높은 자동화 정확도는 육안판독을 통한 수 동 작업이 매우 어렵다는 레이저측량 데이터의 특성을 감안했을 때, MMS 데이터를 이용한 3차원 도로 DEM 구축 등의 실무 작업에서 본 연구 결과물의 효과적인 적용이 가능할 것으로 판단되며, 이를 통해 상당 부분 작업 효율성 향상을 가져올 수 있을 것으로 판단된다.
감사의 글
이 논문은 공간정보 전문인력 양성사업의 지원을 받 아 수행된 연구임
참고문헌
1. 최승식, 2004, 항공 라이다 데이터 필터에 관한 연구, 인하대학교 지리정보공학과 석사학위논문.
2. 김문기, 2005, 라이다를 이용한 도로망 추출에 관한 연 구, 인하대학교 지리정보공학과 석사학위논문.
3. 이정호, 한수희, 유기윤, 변영기, 2004, 라이다자료의 필 터링 기법에 관한 연구, 한국측량학회 2004년도 춘계학 술발표회논문집, pp.471-475.
4. Axelsson P, 2000, DEM Generation from Laser Scanner Data Using Adaptive TIN Models, In IAPRS, Vol. 33. Part B4/1, pp.110-117.