J. Adv. Navig. Technol. 21(6): 537-543, Dec. 2017
Ray형 수중글라이더 소형 축소모델 개발 및 성능시험
Development of Small-sized Model of Ray-type Underwater Glider and Performance Test
최 형 식
1· 이 성 욱
2· 강 현 석
1· Nguyen Ngoc Duc
1· 김 서 강
1· 정 성 훈
3· Peter C. Chu
4· 김 준 영
1*1
한국해양대학교 기계공학부
2
한국해양대학교 조선해양시스템공학부
3
한국해양대학교 산업기술연구소
4
미국 해군대학원 해양학과
Hyeung-sik Choi
1· Sung-wook Lee
2· Hyeon-seok Kang
1· Nguyen Ngoc Duc
1· Seo-kang Kim
1· Seong-hoon Jeong
3· Peter C. Chu
4· Joon-young Kim
1*1
Department of Mechanical Engineering, Korea Maritime and Ocean University, Busan, 49112, Korea
2
Department of Naval Architecture and Ocean Systems Engineering, Korea Maritime and Ocean University, Busan, 49112, Korea
3
Research Institute of Industrial Technology, Korea Maritime and Ocean University, Busan, 49112, Korea
4
Department of Oceanography, Naval Postgraduate School, Monterey, CA, 93943, USA
[요 약]
수중글라이더(UG; underwater glider)는 지속적인 해양관측·탐사를 목적으로 개발된 장기운용 가능한 수중로봇이다. 원통형의 일반적인 수중글라이더는 단일 부력엔진과 자세제어기를 통해 추진하기 때문에, 운동조종성능 측면에서 효율적이지 못하다.
본 논문에서는 기존 원통형 수중글라이더의 부력제어 및 운동제어성능을 개선하기 위해 이중부력엔진을 탑재한 가오리 형태의 수중글라이더를 소개한다. CFD(computational fluid dynamics) 해석을 수행하여 설계된 형상의 글라이드 운동에 대한 유체저항성능 을 해석한다. 산출한 유체력 계수를 바탕으로 운동 시뮬레이션을 수행하여 운동성능을 비교·분석한다. 가오리 형태의 수중글라이 더 소형 축소모델을 제작하고, 제어시스템을 구성하여 기초 성능시험을 수행한다.
[Abstract]
Underwater glider is the long-term operating underwater robot that was developed with a purpose of continuous oceanographic observations and explorations. Torpedo-type underwater glider is not efficient from an aspect of maneuverability, because it uses a single buoyancy engine and motion controller for obtaining propulsive forces and moments.
This paper introduces a ray-type underwater glider(RUG) with dual buoyancy engine, which improves the control performance of buoyancy and motion compared with torpedo-type underwater glider. Carrying out Computational Fluid Dynamics (CFD) analysis as static pitch drift test, the performance of fluid resistance for gliding motion was identified. Based on the calculated hydrodynamic coefficients, the dynamic simulation compared and analyzed the motion performance of torpedo-type and ray-type while controlling same volume of buoyancy engine. Small-sized model of RUG was developed to perform fundamental performance tests.
Key word : Computational fluid dynamics, Dual buoyancy engine, Mass Shifter, Ray-type underwater glider, Simulation.
https://doi.org/10.12673/jant.2017.21.6.537
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 4 December 2017; Revised 7 December 2017 Accepted (Publication) 18 December 2017 (30 December 2017)
*Corresponding Author; Joon-young Kim Tel: +82-51-410-4351
E-mail: [email protected]
Ⅰ. 서 론
수중글라이더(UG; underwater glider)는 장기간 운용하여 광 범위한 해역에 대해 지속적인 해양관측 및 탐사 임무를 수행하 기 위한 수중로봇이다. 수중글라이더의 추진방식은 일반적으 로 기존의 프로펠러 추진방식이 아닌 부력과 중력을 이용한 추 진방식을 채택한다. 이러한 추진방식은 프로펠러 추진방식의 수중로봇에 비해 에너지 소모량이 작아 수중로봇의 운용시간, 즉, 임무수행 시간을 크게 연장할 수 있다. 하지만 보편적으로 사용되고 있는 원통형, 즉, torpedo형 수중글라이더의 경우, 추 진방식과 부력제어장치의 한정적인 용량으로 인해 고속운용이 어렵고 제어성능이 좋지 못하다는 단점이 있다. 이를 보완하기 위해 부력엔진 용량을 증대하거나 제어성능을 향상시키는 새 로운 형태의 수중글라이더에 대한 연구가 필요하다.
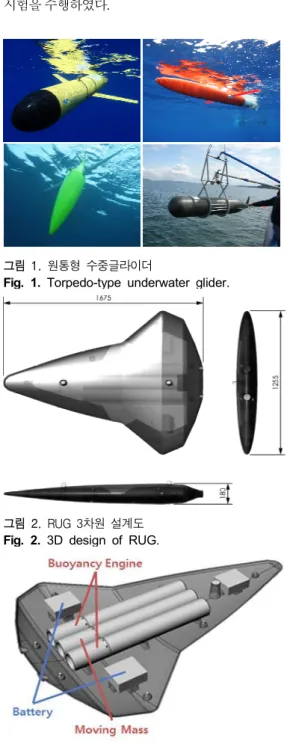
국외에서는 그림 1의 Slocum, Seaglider, Spray, Littoral과 같 은 torpedo형 수중글라이더, 그리고 XRay, ZRay와 같은 Ray형 수중글라이더(RUG; ray-type underwater glider)에 대한 연구가 진행되었으며, 최대운용수심 1000 ~ 2000 m로 개발되어 해양 관측, 해저탐사와 같은 임무를 성공적으로 수행하였다[1-4]. 국 내의 경우 torpedo형 수중글라이더에 대한 연구는 다수 있었으 나 Ray형과 같은 새로운 형태에 대한 연구는 미비한 실정이다 [5-8].
본 논문에서는 Ray형 수중글라이더의 운동성능과 제어 및 항법 알고리즘의 성능시험을 수행할 목적으로 개발된 RUG 소 형 축소모델을 소개한다. 본 논문에서는 RUG 소형 축소모델 개발 내용, 이동질량체의 기초성능시험 내용에 대해 기술한다.
2장에서는 RUG 소형 축소모델의 설계와 유체저항성능을 해석 한다. 3장에서는 운동 시뮬레이션을 수행하여 torpedo형 수중 글라이더 모델과 함께 운동성능을 비교․분석한다. 4장에서는 수조시험을 통해 이동질량체의 자세제어성능을 확인한다.
Ⅱ. RUG 소형 축소모델 설계 및 해석
본 장에서는 RUG 소형 축소모델을 설계하고, CFD 해석으 로 특정 pitch각으로 선체를 고정시켜 선체가 받는 힘과 모멘트 를 측정하는 정적 사항각 시험(static drift test)을 수행하여 유체 저항성능을 분석한다.
2-1 선체 설계
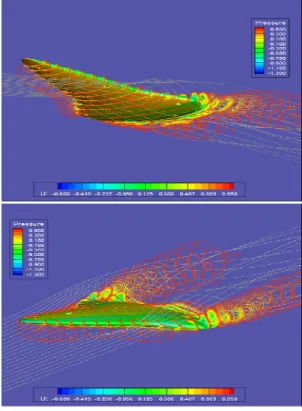
RUG 소형 축소모델의 3D 설계 형상은 그림 2와 같다. 유체 저항성능, 이중부력엔진, 다량의 전원, 센서들의 탑재를 고려하 여 좌우 날개를 설계하였다[9]. 소형 축소모델의 길이는 1675 mm, 폭 1255 mm, 두께 180 mm이다.
2-2 구성
RUG 소형 축소모델의 내부 구성은 그림 3과 같다. 선체의 내부에 3개의 실린더가 위치하며, 이동질량체와 전장부를 탑
재한 중심부의 실린더와 부력엔진과 센서를 탑재한 좌우의 실 린더로 구성된다. 양 날개에는 배터리를 탑재한다.
2-3 유체저항성능 해석
설계된 RUG의 유체저항성능 해석을 위해 전산유체역학 (CFD; computational fluid dynamics) 해석을 이용하였다. 본 절 에서는 RUG 소형 축소모델의 유체저항성능 해석 및 글라이드 운동에 대한 운동성능 검증을 위해 pitch각에 대한 정적 사항각 시험을 수행하였다.
그림 1. 원통형 수중글라이더
Fig. 1. Torpedo-type underwater glider.
그림 2. RUG 3차원 설계도 Fig. 2. 3D design of RUG.
그림 3. RUG 내부 구성
Fig. 3. Inside composition of RUG.
그림 4. Hexpress를 이용한 격자 생성 Fig. 4. Mesh generation using Hexpress.
Parameter Case 1 Case 2 Case 3 Case 4 Case 5 Velocity of
Current 1.0 m/s
Drift Angle 0 ° 5 ° 10 ° 15 ° 20 °
표 1. 정적 사항각 시험의 개요
Table 1. Cases of static drift test.
1) 격자생성
선체에 작용하는 힘과 주변 유체의 유동을 분석하기 위해 그 림 4와 같이 Hexpress를 사용하여 격자를 생성하였다. 가로와 세로, 높이가 각각 선체 길이의 4배, 3배, 3배에 해당하는 공간 을 생성하였으며, 이때 생성된 셀(cell)의 수는 약 90만개이다.
정적 사항각 시험의 개요는 표 1과 같다. 일정한 유속 1.0 m/s 로 흐르는 난류모델을 생성하였으며, 0 ˚, 5 ˚, 10 ˚, 15 ˚, 20 ˚의 각 pitch각별로 Case를 나누어 해석하였다. 그림 5는 RUG 모델 이 20 ˚의 사항각을 가질 때로, 선체 표면에 작용하는 힘과 주변 유체의 유동을 시각적으로 확인할 수 있다. Case별로 정적 사항 각 시험을 수행한 결과, 선체의 pitch각에 따라 선체에 작용하 는 수직력(vertical force)과 Y축에 대한 모멘트(pitch moment)는 그림 6과 같다. 설계된 RUG의 상하 대칭인 형상을 고려하여 음 의 방향으로의 사항각 시험은 생략하였다.
그림 6에 나타낸 정적 사항각 시험 결과는 무차원화 과정을 거친 후 최소자승법을 통해 아래 식 (1)의 두 식과 같이 나타낼 수 있다.
(1)
여기서,
,
은 유체에 의한 수직력과 Y축에 대한 모멘트 를 나타낸다. 위 식에서 유체에 대한 선체의 저항성능을 나타내 는 유체력 계수
,
,
,
는 표 2와 같이 산출된다.
그림 5. 정적 사항각 시험 ( ) Fig. 5. Static drift calculation ( )
그림 6. 정적 사항각 시험 결과 Fig. 6. Results of static drift test
Hydrodynamic coefficient Value
-0.442290
-0.540608
-0.042128
-0.059445
표 2. 유체력 계수
Table 2. Hydrodynamic coefficients.
Ⅲ. RUG 운동성능 시험
3-1 좌표계 및 운동방정식
그림 7. Ray형 수중글라이더의 좌표계 Fig. 7. Coordinate system of RUG.
RUG 모델의 지구고정좌표계와 선체고정좌표계는 그림 7과 같다. 선체고정좌표계의 각 축에 대한 병진·회전 운동은 일반 적으로 사용되는 SNAME의 표기법을 따르며, 뉴턴-오일러에 의해 식 (2)의 6자유도 비선형 운동방정식으로 유도된다.
(2)
여기서, , , 와 , , 은 각각
,
,
축에 대한 속 도와 각속도를 나타낸다.
는 각 첨자에 나타난 축에 대한 질 량관성모멘트를 가리키며,
,
,
는 선체고정좌표계의 원 점에 대한 질량중심의 위치이다. 식 (2)의 우변은 외력에 의한 힘과 모멘트로, 각 첨자에 나타난 축에 대해 RUG 모델이 받는 힘 또는 모멘트를 통칭한다.
본 논문에서 소개하는 RUG 소형 축소모델은 내부에 탑재된 이동질량체와 부력제어장치를 이용하여 추진력 및 제어력을 얻는다.
3-2 운동 시뮬레이션
본 논문의 RUG의 운동 시뮬레이션 프로그램은 그림 8과 같 이 구성되었으며, 크게 제어기와 RUG 운동 모델로 나누어 볼 수 있다. 운동 시뮬레이션에서는 RUG 소형 축소모델의 제원과 앞 절에서 산출한 유체력 계수를 고려한다. 본 논문에서는 Ray 형과 Torpedo형의 수중글라이더를 동일한 부력용량을 제어하
여 글라이드 운동시켰을 때의 운동성능을 비교·분석한다.
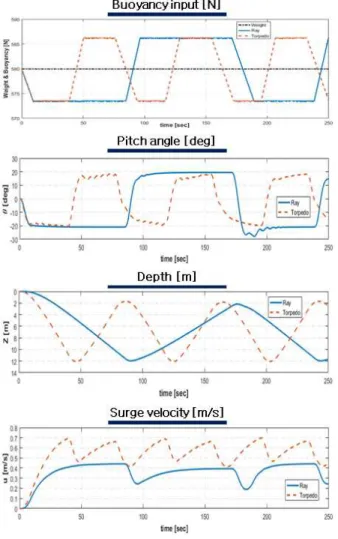
시뮬레이션의 개요는 다음과 같다. 그림 9와 같이 시뮬레이 션에서 pitch각을 –20 °에서 20 °로 제한하고 최대로 제어하는 부력용량을 같게 하여 2 m와 12 m의 수심을 왕복하였다. 그림 9의 전진방향 속도에 대한 그래프를 통해, RUG와 torpedo형 UG를 동일한 최대부력용량으로 제어했을 때 유체저항이 큰 RUG가 상대적으로 저속 주행하는 것을 확인하였다.
그림 8. RUG 운동 시뮬레이션 프로그램 Fig. 8. RUG dynamic simulation program.
그림 9. 운동 시뮬레이션 결과
Fig. 9. Results of dynamic simulation.
Ⅳ. 성능시험
4-1 하드웨어 구성
그림 10. 시스템 구성도
Fig. 10. System block diagram.
그림 11. 개발된 RUG 내부
Fig. 11. Inside of developed RUG.
개발된 RUG 소형 축소모델의 시스템 구성은 그림 10과 같 으며, 양 날개에 탑재된 2개의 배터리와 이중부력엔진, 이동질 량체, 제어시스템, 통신시스템, 항법시스템이 탑재된 3개의 실 린더로 구성된다. RUG의 내부는 그림 11과 같다.
4-2 이동질량체 성능시험
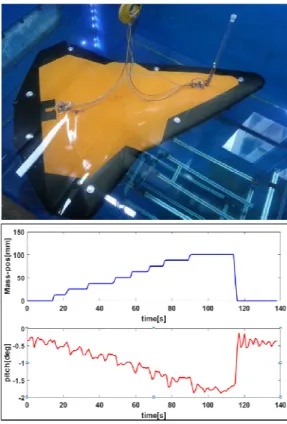
한국해양대학교 수조에서 pitch각 제어에 대한 내부 이동질 량체의 성능을 확인하기 위해 그림 12와 같이 수조에서 실험을 진행하였다. 이동질량체를 중립 위치에서 선수방향으로 임의 로 조금씩 이동하여 pitch각의 변화를 확인하였다.
Ⅴ. 결 론
본 논문에서는 새로운 형태의 수중글라이더로 Ray형 수중 글라이더를 소개하였다. 먼저, 설계된 형상에 대한 CFD 해석을 수행하여 글라이드 운동에 대한 유체저항성능을 해석하였고, 산출된 유체력 계수를 바탕으로 운동 시뮬레이션을 수행하였 다. 이를 통해 RUG의 XZ평면에 대해 넓어진 표면적에 비례하 여 글라이드 운동 시 유체저항도 증가함을 확인하였다. 또한 제 어시스템을 구성하고 수조시험을 수행하여 이동질량체의 기초 제어성능을 확인하였다.
추후, 선회 운동을 포함한 6자유도 운동으로 확대하여 해석 연구를 진행할 예정이며, 실제 RUG 소형 축소모델의 운동특성 을 잘 반영할 수 있도록 시뮬레이션 프로그램을 수정·보완할 것이다. 또한, 이중부력엔진에 대한 기초 성능시험을 진행하여 pitch각 제어에 대한 이중부력엔진의 성능을 확인할 것이다.
그림 12. 이동질량체의 제어성능시험
Fig. 12. Control performance test of mass shifter.
Acknowledgments
본 과제는 교육부와 한국연구재단의 재원으로 지원을 받아
수행된 사회맞춤형 산학협력 선도대학(LINC+) 육성사업(2017
– E–G056–010103)과 미래창조과학부의 재원으로 무인이동
체 미래선도 핵심기술개발사업(No.2016M1B3A1A02937626)
의 연구결과입니다.
References
[1] D. C. Webb, P. J. Simonetti and C. P. Jones, “SLOCUM, An underwater glider propelled by environmental energy”, IEEE Journal of Oceanic Engineering, Vol.26, No.4, pp.447-452, 2001.
[2.] C. C. Eriksen, T. J. Osse, R. D. Light, T. Wen, T. W. Lehman, P. L. Sabin, J. W. Ballard and A. M. Chiodi, “Seaglider: A long range autonomous underwater vehicle for oceanographic research”, IEEE Journal of Oceanic Engineering, Vol.26, No.4, pp.424-436, 2001.
[3] J. Sherman, R. E. Davis, W. B. Owens and J. Valdes, “The Autonomous Underwater Glider ‘Spray’”, IEEE Journal of Oceanic Engineering, Vol.26, No.4, pp.437-446, 2001.
[4] S. L. Wood and C. E. Mierzwa, “State of technology in autonomous underwater gliders”, The Marine Technology Society Journal, Vol.47, No.5, pp.84-96, 2013.
[5] Y. S. Park, S. J. Lee, Y. K. Lee, S. K. Jung, N. D. Jang and H.
W. Lee, “Report of east sea crossing by underwater glider”,
Journal of the Korean Society of Oceanography, Vol.17, No.2, pp.130-137, May 2012.
[6] D. H. Ji, H. S. Choi, J. Y. Kim, D. W. Jung and S. H. Jeong,
“A design control system of hybrid underwater glider and performance test”, Journal of Advanced Navigation Technology, Vol.21, No.1, pp.21-29, 2017.
[7] K. S. Nam, J. H. Bae, S. K. Jeong, S. J. Lee and J. Y. Kim,
“Dynamics modeling and performance analysis for the underwater glider”, Journal of the Korean Society of Marine Engineering, Vol.39, No.7, pp.709-715, 2015.
[8] D. H. Kim, S. S. Lee, H. S. Choi, J. Y. Kim, S. J. Lee and Y. K.
Lee, “Dynamic modeling and motion analysis of unmanned underwater gliders with mass shifter unit and buoyancy engine”, Journal of Ocean Engineering and Technology, Vol.28, No.5, pp.466-473, Oct. 2014.
[9] S. W. Lee, J. H. Jeong, S. K. Jeong, H. S. Choi and J. Y. Kim,
“Hull design and dynamic performance analysis for ray-type underwater glider”, Journal of Embedded Systems and Applications, Vol.12, No.5, pp.343-350, Oct. 2017.
최 형 식 (Hyeung-Sik Choi)
1989년 2월 : 미국 University of South Carolina 기계공학 (공학석사) 1993년 2월 : 미국 University of North Carolina 기계 및 항공공학 (공학박사) 1993년 ~ 1997년 : 한국기계연구원 (박사 후 연구원)
1997년 5월 ~ 현재 : 한국해양대학교 기계공학부 교수
※관심분야 : 휴머노이드 로봇, 무인수중로봇, 제어, 수중 가시광 통신
이 성 욱 (Sung-Wook Lee)
1998년 2월 : 한국해양대학교 조선공학 (공학석사)
2007년 3월 : 일본 큐슈대학교 선박해양시스템공학 (공학박사)
2007년 ~ 2009년 : Maritime Research Institute Netherlands, MARIN (Project engineer) 2009년 ~ 2016년 : ㈜삼성중공업 (수석연구원)
2016년 8월 ~ 현재 : 한국해양대학교 조선해양시스템공학부 조교수
※관심분야 : 선박운동조종, CFD 해석, 선박조종 시뮬레이션 및 강화학습
강 현 석 (Hyeon-Seok Kang)
2013년 8월 : 한국해양대학교 제어자동화공학전공 (공학사)
2017년 8월 : 한국해양대학교-한국해양과학기술원 해양과학기술전문대학원 (OST) 해양과학기술융합학과 해양선박·플랜트전공 (공학석사)
2017년 9월 ~ 현재 : 한국해양대학교 수중운동체특화연구센터 (연구원)
※관심분야 : 무인수중로봇, 제어, 수중항법, 센서 융합
Nguyen Ngoc Duc
2014년 8월 : 베트남 Hochiminh University of Technology, Mechatronic Engineering (Bachelor‘s degree) 2016년 8월 : Korea Maritime and Ocean University, Mechanical Engineering (Master’s degree) 2016년 ~ 현재 : Korea Maritime and Ocean University (PhD Candidate)
※관심분야 : Unmanned Underwater Vehicle, Underwater Glider
김 서 강 (Seo-Kang Kim)
2017년 2월 : 한국해양대학교 기계공학 (공학사) 2017년 ~ 현재 : 한국해양대학교 기계공학 (공학석사 재학)
※관심분야 : 수중 글라이더 및 플랫폼 설계
정 성 훈 (Seong-Hoon Jeong)
2004년 2월 : 한국해양대학교 전자통신공학 (공학석사) 2007년 2월 : 한국해양대학교 전자통신공학 (공학박사)
2003년 ~ 2010년 : 부산경상대학교 멀티미디어컴퓨터과 겸임교수 2010년 ~ 현재 : 한국해양대학교 산업기술연구소 산학연구교수
※관심분야 : 해양 무인화 시스템, Smart Ship, e-Navigation, 해상통신, ICT 융·복합 기술
Peter C. Chu
1985년 : 미국 University of Chicago, Geophysics (공학박사)
1986년 ~ 1991년 : Naval Postgraduate School, Department of Oceanography (Adjunct professor) 1992년 ~ 1999년 : Naval Postgraduate School, Department of Oceanography (Associate professor) 2000년 ~ 2010년 : Naval Postgraduate School, Department of Oceanography (Professor)
2011년 ~ 현재 : Naval Postgraduate School, Department of Oceanography (Distinguished professor and Chair)
※관심분야 : Naval Ocean Analysis and Prediction, P-vector Inverse Method, Ocean Optimal Spectral Decomposition
김 준 영 (Joon-Young Kim)
1993년 2월 : 인하대학교 조선해양공학 (공학석사) 1999년 8월 : 한양대학교 정밀기계공학 (공학박사)
2005년 4월 ~ 2011년 3월 : 제주대학교 해양시스템공학과 조교수 2011년 2월 ~ 현재 : 한국해양대학교 기계공학부 부교수
※관심분야 : 선체운동모델링 및 동역학 해석, 해양플랜트 설계 및 해석, 무인잠수정 설계 및 제어