44
The Study of Gigapixel Camera Technology and the Stunning High-Resolution Gigapixel Image Created by Utilizing a Robotic Panoramic Head and an
Image-Stitching Technique
Yeon Chan Choi, Hee Jun Moon, Dong Young Kim, Jae Yun Ryu, Ye Rang Shin, and Cheon-Seog Rim
†Department of Computer, Communications, and Unmanned Technology, Hannam University, 133 Ojeong-dong, Daedeok-gu, Daejeon 306-791, Korea
(Received February 2, 2015; Revised manuscript February 5, 2015; Accepted February 5, 2015)
Since the technology of current image sensors is limited to the megapixel class, it is necessary to use an image-stitching technique to create a gigapixel image from hundreds or thousands of photos taken by a megapixel image sensor. In this paper, we investigate the entire process of gigapixel camera technology employing a robotic panoramic head plus a stitching technique, and analyze the gigapixel camera technologies of Duke University and BAE Systems from the viewpoint of optical design structure. Hopefully this knowledge will lead to a new optical structure for a gigapixel camera. Meanwhile, we also perceive the need for additional image processing to reduce the noise of photos with a background of fog and mist, taken far from the camera lens.
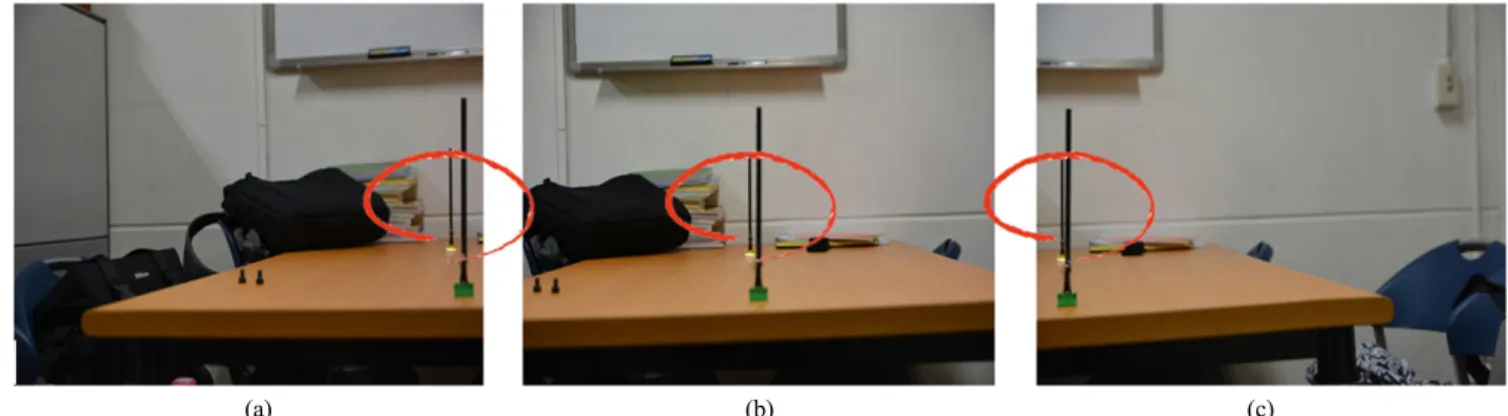
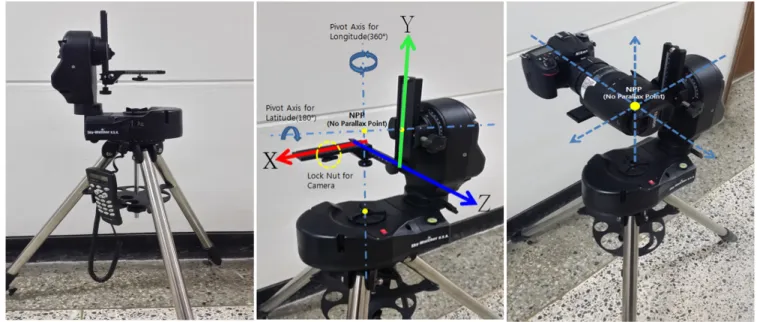
Keywords: Robot panoramic head, Stitching, Parallax, Gigapixel, Gigapixel camera
OCIS codes: (150.0150) Machine vision; (150.0155) Machine vision optics; (150.4232) Multisensor methods; (150.6044) Smart cameras
로봇파노라마헤드와 스티칭 기법을 활용한 기가픽셀 이미지의 생성과 기가픽셀카메라 기술
최연찬ㆍ문희준ㆍ김동영ㆍ류재윤ㆍ신예랑ㆍ임천석 † 한남대학교 컴퓨터통신무인기술학과
우