989
Reality Simulator (LAP Mentor
TM)
Tae Hyo Kim, Jung Min Ha, Jae Wook Cho, Youn Chul You, Gyung Tak Sung
From the Department of Urology, College of Medicine, Dong-A University, Busan, Korea
Purpose: The need for efficient and optimal training through a structured laparoscopic training program has become increasingly evident. Virtual reality simulation may provide a safe and efficient means of acquiring laparoscopic skills. The LAP MentorTM is a high-fidelity virtual reality simulator with haptic feedback that allows a trainee to practice 9 basic laparoscopic tasks including laparoscopic suturing. The purpose of this study was to evaluate the predictive validity of performance on the LAP Mentor before surgical simulators are incorporated into training programs.
Materials and Methods: Eleven participants (6 medical students and 5 residents) underwent laparoscopic skills training on the virtual reality simulator LAP Mentor. Each participant was tested on 5 sets of 4 LAP Mentor basic laparoscopic tasks (grasping, cutting, clipping, and suturing) in a 3-week period. Total time and accuracy were measured for each task.
Results: There was a significant difference between the initial session and the final session for total time and accuracy in both groups. Among the medical students, as they progressed through the training step by step, total time decreased for the grasping task, the cutting task, the clipping task, and the suturing task. At the same time, accuracy improved for the grasping task, the cutting task, the clipping task, and the suturing task, respectively. The residents group showed a similar progression.
Conclusions: Basic skills straining on a LAP Mentor virtual reality simulator improves learning of the basic skills for laparoscopy. Education with virtual reality simulators, therefore, may provide an effective teaching method and lead to improved operating performance. (Korean J Urol 2009;50:989-995)
Key Words: Laparoscopy, Education
Korean Journal of Urology Vol. 50 No. 10: 989-995, October 2009
DOI: 10.4111/kju.2009.50.10.989
Received:June 2, 2009 Accepted:September 21, 2009 Correspondence to: Gyung Tak Sung
Department of Urology, Dong-A University, 1, 3-ga, Dongdaesin- dong, Seo-gu, Busan 602-715, Korea
TEL: 051-240-5446 FAX: 051-253-0591 E-mail: [email protected]
Ⓒ The Korean Urological Association, 2009
INTRODUCTION
Since the first laparoscopic nephrectomy was performed by Clayman et al, laparoscopic surgery has been widely applied in various urologic diseases [1]. Due to the advantages of laparoscopic surgery, such as shortened recovery and decreased postoperative mortality, laparoscopic approaches to various reconstructive and ablative surgeries have been accepted as the standard treatment modality [2,3]. However, laparoscopic surgery has been associated with a steep learning curve;
therefore, establishment of an optimal training program is
imperative for surgeons to acquire adequate skills [4]. In urology, approximately 40 cases have been reported to be sufficient for acquiring initial proficiency in laparoscopic procedures [5,6]. In the United States, many hospitals use a training program to teach laparoscopic skills [7]. Various centers of excellence provide structured training programs including dry and animal labs for a training course before the actual clinical application [8]. Because residents usually participate as an assistant in the laparoscopic surgery, they are exposed to some laparoscopic experiences. If residents could participate in a structured training program, however, this would enhance the synergic effect in terms of comprehensive
Fig. 1. Exterior view of virtual reality simulator (LAP MentorTM).
training in both basic and advanced laparoscopic techniques.
As a training model for basic laparoscopic skills, a pelvic box trainer is generally used to practice grasping, cutting, clipping, or suturing [5-9]. Also, various animal models are used to teach laparoscopic techniques. A swine model has been used most often because of the relative size of the abdominal cavity, but the model is somewhat expensive. Recently, a virtual reality simulator was introduced to provide surgical training on an actual clinical level and was shown to be advantageous in acquiring various basic and advanced laparoscopic techniques. A series of simulator-based programs will be very helpful for learning laparoscopic procedures and getting accustomed to the hand-eye coordination required [10].
Given the above background, we analyzed whether a virtual reality simulator is effective in enhancing the educational level of medical students who are novices and of residents who have some experience in laparoscopic surgery through training in basic laparoscopic skills.
SUBJECTS AND METHODS 1. Subjects
This study included a total of 11 subjects consisting of 6 medical students who had no prior experience in laparoscopic surgery and 5 residents who had some experience in laparoscopic surgery. The subjects who took part in the experiment were all men, and all of them were right-handed.
The average age of the medical students was 22.5 years old and that of the urologic residents was 27.4 years.
Changes in the training stage of the subjects were monitored by using a simulator program during a 3-week period. No subjects had previously participated in laparoscopic training with a virtual reality simulator.
2. Methods
The simulator that was used in the current study, the LAP MentorTM (Simbionix, USA), was specifically designed for laparoscopic training (Fig. 1).
The subjects were assigned to two groups and were asked to train on four basic techniques in accordance with the training guidelines proposed by the simulator. They were asked to repeatedly perform such maneuvers as grasping, cutting, clipping, and suturing five times each. Attempts were made to monitor changes in total time and technical accuracy.
(1) Grasping mode: A red ball that was encased in a jelly was exposed by using a duck bill grasper. After the ball’s color was converted to green, the ball was grasped with the use of the other grasper and was placed in a jelly bag.
(2) Cutting mode: A cutting line that was contained in a round jelly pad was pulled with one hand with the use of a retractor. Thus, the cutting area was exposed. Using the contralateral hand, the cutting was done with a straight scissor.
Thus, the exposure was attempted outside of a jelly pad.
(3) Clipping mode: The red part of a duct where the water flowed downward was pulled with the use of a duck bill grasper. When this part was converted to green, clipping was done with the use of a metal clip applier.
(4) Suture mode: Needling was done with the use of a needle driver that was grasped by both hands. Thus, the suture area was hooked and a C-shape loop was created. After this, a discontinuous suture where the surgeon's knot was made was performed.
The total transit time and simulator-based accuracy for each repeated technique were compared between the two groups. In each group, the changes in transit time and technical accuracy were depicted by using a progression curve. Repeated-measures ANOVA was used to analyze the decrease in average transit time and the increase in accuracy in each session and in each group. All statistical analysis was performed by using SPSS ver. 14.0.
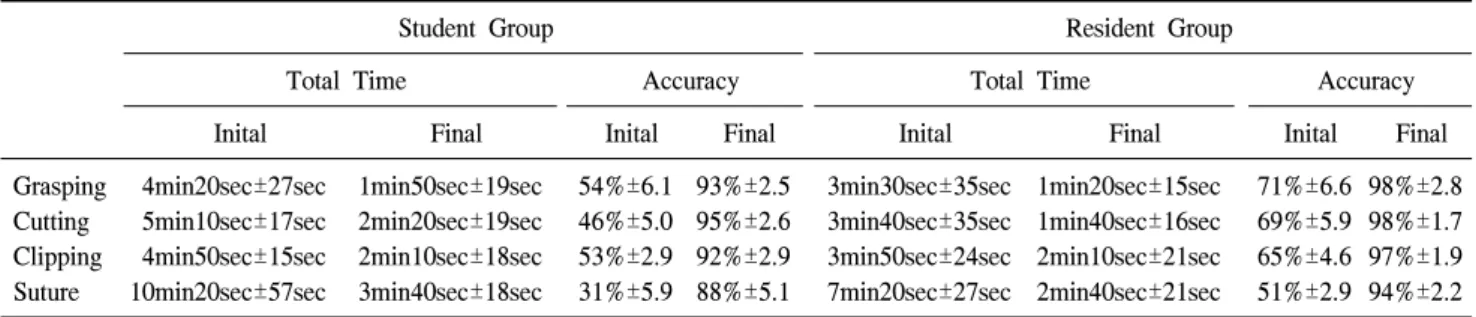
Table 1. Progress of grasping, cutting, clipping and suture in total time and accuracy by students and residents
Student Group Resident Group
Total Time Accuracy Total Time Accuracy
Inital Final Inital Final Inital Final Inital Final
Grasping Cutting Clipping Suture
4min20sec±27sec 5min10sec±17sec 4min50sec±15sec 10min20sec±57sec
1min50sec±19sec 2min20sec±19sec 2min10sec±18sec 3min40sec±18sec
54%±6.1 46%±5.0 53%±2.9 31%±5.9
93%±2.5 95%±2.6 92%±2.9 88%±5.1
3min30sec±35sec 3min40sec±35sec 3min50sec±24sec 7min20sec±27sec
1min20sec±15sec 1min40sec±16sec 2min10sec±21sec 2min40sec±21sec
71%±6.6 69%±5.9 65%±4.6 51%±2.9
98%±2.8 98%±1.7 97%±1.9 94%±2.2 RESULTS
The laparoscopic procedure was repeatedly performed by medical students who had no experience in laparoscopic surgery and by residents who had participated in laparoscopic surgery as the assistant operator. According to this, the transit time was shortened and accuracy was enhanced (Table 1).
Observations were made in a total of 11 subjects. These showed that the mean transit time for grasping decreased from 3 minutes plus 57 seconds in the first session to 1 minute plus 20 seconds in the fifth session, and mean accuracy increased from 61% in the first session to 95% in the fifth session (p=0.003). The mean transit time for cutting decreased from 4 minutes plus 29 seconds in the first session to 2 minutes plus 1 second in the fifth session, for which mean accuracy increased from 56% in the first session to 96% in the fifth session (p=0.003). The mean transit time for clipping decreased from 4 minutes plus 22 seconds in the first session to 2 minutes plus 10 seconds in the fifth session, for which mean accuracy increased from 58% in the first session to 94% in the fifth session (p=0.003). The mean transit time for suturing decreased from 8 minutes plus 58 seconds in the first session to 3 minutes plus 12 seconds in the fifth session, for which mean accuracy increased from 40% in the first session to 90% in the fifth session (p=0.003).
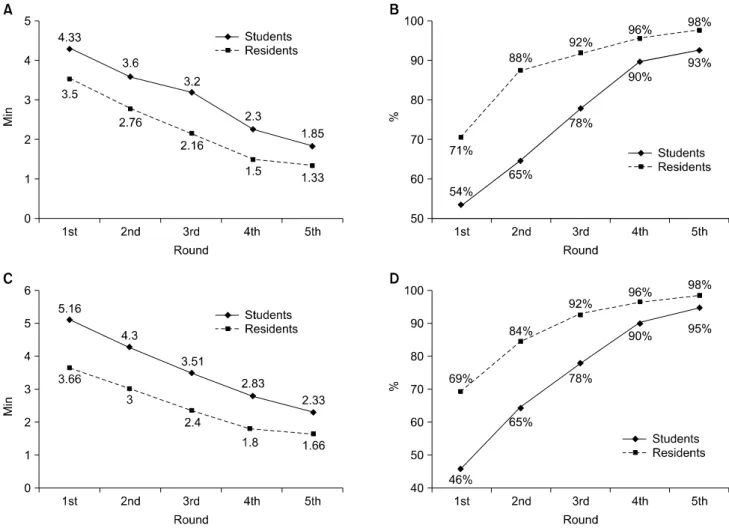
Changes in accuracy were monitored in both groups. The mean transit time for grasping decreased from 4 minutes plus 20 seconds (in the first session) to 1 minute plus 50 seconds (in the fifth session) in the medical students. In the residents, it decreased from 3 minutes plus 30 seconds (in the first session) to 1 minute plus 20 seconds (in the fifth session) (p=0.043) (Fig. 2). Interactions between transit time and group were not statistically significant (p=0.511). Changes in transit
time at each stage were statistically significant (p<0.001). The change in transit time was statistically significantly different at each session (p=0.002).
The mean accuracy for grasping increased from 54% (in the first session) to 93% (in the fifth session) in the medical students (p=0.027). In the residents, it increased from 71% (in the first session) to 98% (in the fifth session) (p=0.043) (Fig. 2).
Interactions between accuracy and each group were statistically significant (p=0.004). Changes in accuracy at each session were statistically significant (p<0.001). Changes in accuracy were statistically significantly different at each session (p<0.001).
The mean transit time for cutting decreased from 5 minutes plus 10 seconds (in the first session) to 2 minutes plus 20 seconds (in the fifth session) in the medical students (p=0.027).
In the residents, it decreased from 3 minutes plus 40 seconds (in the first session) to 1 minute plus 40 seconds (in the fifth session) (p=0.042) (Fig. 2). Interactions between transit time and group were not statistically significant (p=0.058). Changes in transit time at each stage were statistically significant (p<
0.001). Changes in transit time were statistically significantly different at each session (p<0.001).
The mean accuracy for cutting increased from 46% (in the first session) to 95% (in the fifth session) in the medical students (p=0.027). In the residents, it increased from 69% (in the first session) to 98% (in the fifth session) (p=0.043) (Fig.
2). Interactions between accuracy and group were statistically significant (p=0.003). Changes in accuracy at each session were statistically significant (p<0.001). Changes in accuracy were statistically significantly different at each session (p<0.001).
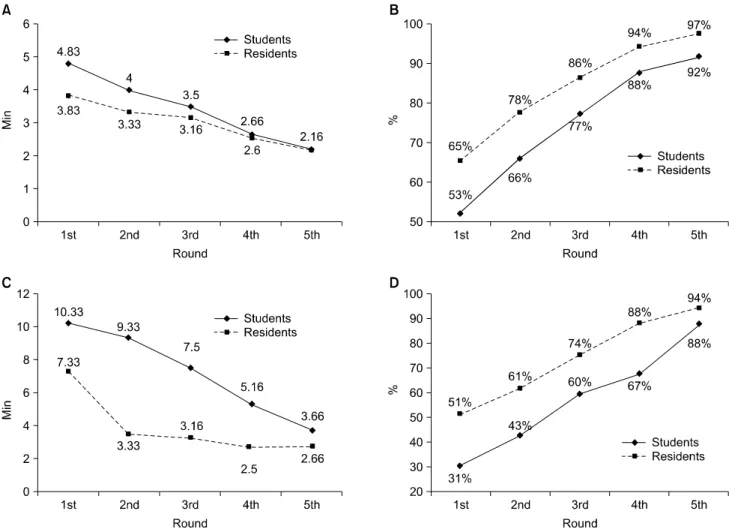
The mean transit time for clipping decreased from 4 minutes plus 50 seconds (in the first session) to 2 minutes plus 10 seconds (in the fifth session) (p=0.027) in the medical students.
In the residents, it decreased from 3 minutes plus 50 seconds (in the first session) to 2 minutes plus 10 seconds (in the fifth
Fig. 2. (A, B) Overall progress in grasping time (A) and accuracy (B) of two groups. (C, D) Overall progress in cutting time (C) and accuracy (D) of two groups.
session) (p=0.043) (Fig. 3). Interactions between transit time and group were statistically significant (p=0.013). Changes in transit time at each stage were statistically significant (p<
0.001). Changes in transit time were statistically significantly different at each session (p=0.020).
The mean accuracy for clipping increased from 53% (in the first session) to 92% (in the fifth session) (p=0.027) in the medical students. In the residents, it increased from 65% (in the first session) to 97% (in the fifth session) (p=0.043) (Fig.
3). Interactions between accuracy and each group were not statistically significant (p=0.212). Changes in accuracy at each session were statistically significant (p<0.001). Changes in accuracy were statistically significantly different at each session (p=0.002).
The mean transit time for suturing decreased from 10 minutes plus 20 seconds (in the first session) to 3 minutes plus 40 seconds (in the fifth session) (p=0.027) in the medical
students. In the residents, it decreased from 7 minutes plus 20 seconds (in the first session) to 2 minutes plus 40 seconds (in the fifth session) (p=0.043) (Fig. 3). Interactions between transit time and group were statistically significant (p<0.001).
Changes in transit time at each stage were statistically signifi- cant (p<0.001). Changes in transit time were statistically significantly different at each session (p<0.001).
The mean accuracy for suturing increased from 31% (in the first session) to 88% (in the fifth session) in the medical students (p=0.028). In the residents, it increased from 51% (in the first session) to 94% (in the fifth session) (p=0.042) (Fig.
3). Interactions between accuracy and group were statistically significant (p=0.009). Changes in accuracy at each session were statistically significant (p<0.001). Changes in accuracy were statistically significantly different at each session (p<0.001).
Fig. 3. (A, B) Overall progress in clipping time (A) and accuracy (B) of two groups. (C, D) Overall progress in suture time (C) and accuracy (D) of two groups.
DISCUSSION
Thanks to its benefits and advantages, the demand for laparoscopic surgery is increasing in urology. Research on the current situation of Korean laparoscopic urological surgery shows that, although differences exist by hospital, laparoscopic operations are effective at many hospitals universally [11]. As the technical innovation in laparoscopic surgery advances, surgical technique training must evolve accordingly. In ad- dition, it should be noted that laparoscopic surgery differs significantly from traditional laparotomic surgery because the surgical concepts of laparotomy and laparoscopy are consider- ably different. In other words, the surgical concept of laparoscopic surgery can be expressed as a two-dimensional system. As a matter of fact, however, surgeons must get accustomed to it in a three-dimensional manner and relevant
surgical maneuvers are therefore needed [12]. Despite the innovations and advancements in laparoscopic techniques, a proper and effective training program has not been offered. To make matters worse, the traditional training programs suffer from cost-ineffectiveness. Also, residents do not have enough time to receive training [12].
To perform laparoscopic surgery, two thing are essential.
First, it is critical to understand the principles of laparoscopy and the functions of the various laparoscopic instruments.
Second, a wide range of experiences is required before the actual clinical application of the procedure. Due to the various complications of laparoscopic surgery, surgeons must com- pletely understand the laparoscopic principles and the functions of the laparoscopic instruments. They must also be aware of the preventive and treatment measures against these complications [13]. Hence, trained experts are needed to teach a systematic laparoscopic training program. A generally used
laparoscopic training model is a non-animal model called the
‘pelvic box trainer,' with which trainees can be trained on basic laparoscopic techniques. Some researchers have shown that a training model using pigs and rabbits produces excellent results [14]. When trainees use a pelvic trainer, their hand-eye coordination improves, and they get accustomed to the laparoscopic instruments. As a result, the laparoscopic training will be intensive and drastically effective [15,16]. According to Derossis et al intensiveness is critical in laparoscopic training [17]. Those authors divided their subjects into two groups. One group received training for 5 weeks, whereas the other group received no training. Five weeks later, the two groups performed laparoscopic surgery and the outcomes were compared. There is a domestic report of carrying out laparo- scopic training with a small animal such as the rabbit [18]. In another study, Traxer et al compared two groups, one of which was trained with a pelvic trainer and one of which received animal training [19]. Those authors reported that the latter group performed better. Several studies on the clinical ap- plication of laparoscopic training have shown that surgeons with laparoscopic techniques performed varicocelectomy or pelvic lymphadenectomy an average of 9 times in the past 1-6 years [15]. In addition, 5 years after training on laparoscopic techniques, various laparoscopic surgeries were performed by an average of 54% of training surgeons. Twelve months after the training course was completed, 25 cases of laparoscopic surgery were performed annually on average [20].
The disadvantage of a training program is that learning the surgical technique in a training program is tedious, inefficient, and cost-ineffective. Furthermore, it is doubtful that each training process is sufficient for the clinical application of a surgical technique. On the other hand, by using a virtual reality simulator, we were able to conduct effective laparoscopic training in terms of cost-effectiveness and technical aspects.
Maneuvering a virtual reality simulator is not greatly different from maneuvering the laparoscopic instruments with which surgery is performed in humans. Because a virtual reality simulator produces images almost identical to the actual procedure, medical students and residents who want to learn laparoscopic techniques at an early stage can be trained anywhere and anytime. Our study shows that the parameters assessed improved through the training based on a virtual reality simulator, even though the 11 subjects had different laparoscopic experience.
Various studies have examined the effectiveness of a virtual reality simulator. Similar to the previous literature, our study confirmed the effectiveness of the LAP Mentor system [17,21].
In most phases, the residents demonstrated a faster acquisition and higher accuracy of laparoscopic techniques than the medical students did. Presumably, this was due to the gap between the two groups in terms of background knowledge and surgical experiences. Another type of virtual reality simulator, the Lapsim, generated similar results [21,22]. Medical students were far behind residents in terms of performance duration and accuracy in the early stages of training. However, medical students made such significant improvement in transit time and accuracy that they were almost on a par with the residents in the later stages of training. These findings indicate that even subjects with no laparoscopic experience can acquire laparo- scopic surgical techniques through a simulated training program within a short period of time.
The study subjects were medical students and residents who could not spare enough time for this experiment and therefore did not receive intensive training. This may explain why the learning curve was not shortened as had been expected.
Furthermore, the sensor of the simulator was extremely sensitive to the slightest difference in manipulation, which hindered the subjects from smoothly moving to the next level.
A comprehensive and effective laparoscopic training program would place a trainee first in a virtual-reality-simulator-based laparoscopic training, followed by previously suggested animal experimentation. Our study would be a good guideline for residents and medical students in other specialty areas who wish to acquire laparoscopic surgical techniques.
CONCLUSIONS
The learning capability of the subjects, who were trained with a virtual reality simulator and acquired fundamental laparoscopic techniques, improved in a short period of time.
Therefore, a training program for laparoscopic surgical technique based on a virtual reality simulator can be used as an effective primary method for residents and medical students who have no experience at all or insufficient experience in laparoscopic surgery. Trainees can efficiently improve their surgical techniques in a short period of time by receiving various laparoscopic training. In addition, they would be more comfortable with the technique and more confident in
performance. Henceforth, if we develop a comprehensive guide- line for laparoscopic training, incorporating further experiments, a systematic and effective laparoscopic training program will be possible.
REFERENCES
1. Clayman RV, Kavoussi LR, Soper NJ, Dierks SM, Meretyk S, Darcy MD, et al. Laparoscopic nephrectomy: initial case report. J Urol 1991;146:278-82.
2. Guillonneau B, Abbou CC, Doublet JD, Gaston R, Janetschek G, Mandressi A, et al. Proposal for a “European Scoring Sys- tem for Laparoscopic Operations in urology”. Eur Urol 2001;
40:2-6.
3. Guillonneau B, Rozet E, Cathelineau X, Lay F, Barret E, Doublet JD, et al. Perioperative complications of laparoscopic radical prostatectomy: the Montsouris 3-year experience. J Urol 2002;167:51-6.
4. Kim HH. Laparoscopic surgery in urology (I). Korean J Urol 2003;44:945-58.
5. Hoznek A, Katz R, Gettman M, Salomon L, Antiphon P, de la Taille A, et al. Laparoscopic and robotic surgical training in urology. Curr Urol Rep 2003;4:130-7.
6. Gill IS, Zippe CD. Laparoscopic radical prostatectomy: tech- nique. Urol Clin North Am 2001;28:423-36.
7. Shalhav AL, Dabagia MD, Wagner TT, Koch MO, Lingeman JE. Training postgraduate urologists in laparoscopic surgery:
the current challenge. J Urol 2002;167:2135-7.
8. Dent TL. Training, credentialling, and granting of clinical privileges for laparoscopic general surgery. Am J Surg 1991;
161:399-403.
9. Medina M. Formidable challenges to teaching advanced la- paroscopic skills. JSLS 2001;5:153-8.
10. Zhang A, Hünerbein M, Dai Y, Schlag PM, Beller S. Con- struct validity testing of a laparoscopic surgery simulator (Lap Mentor): evaluation of surgical skill with a virtual laparoscopic
training simulator. Surg Endosc 2008;22:1440-4.
11. Lim DJ, Kim HH, Moon YT, Park YY, Yang SK, Yoon SJ, et al. Endourologic procedures and laparoscopic surgery in urology training hospitals: the report of nationwide survey.
Korean J Urol 2004;45:714-9.
12. McDougall EM, Corica FA, Boker JR, Sala LG, Stoliar G, Borin JF, et al. Construct validity testing of a laparoscopic surgical simulator. J Am Coll Surg 2006;202:779-87.
13. Summers AN, Rinehart GC, Simpson D, Redlich PN.
Acquisition of surgical skills: a randomized trial of didactic, videotape, and computer-based training. Surgery 1999;126:
330-6.
14. Ahn KI, Bae KS, Lee JW, Park JM, Lee DK, Jeon SH. A model and a program for training laparoscopic urethrovesical anastomosis. Korean J Urol 2006;47:407-11.
15. Melvin WS, Johnson JA, Ellison EC. Laparoscopic skills enhancement. Am J Surg 1996;172:377-9.
16. Sreenivas VI, Pothula V. Videolaparoscopy in general surgery.
An update. N C Med J 2001;62:205-9.
17. Derossis AM, Bothwell J, Sigman HH, Fried GM. The effect of practice on performance in a laparoscopic simulator. Surg Endosc 1998;12:1117-20.
18. Kim TH, Sung GT, Cho WY. Development of laparoscopic training protocol using small animal model in urology. Korean J Urol 2005;46:741-9.
19. Traxer O, Gettman MT, Napper CA, Scott DJ, Jones DB, Roehrborn CG, et al. The impact of intense laparoscopic skills training on the operative performance of urology residents. J Urol 2001;166:1658-61.
20. Hawasli A, Featherstone R, Lloyd L, Vorhees M. Laparoscopic training in residency program. J Laparoendosc Surg 1996;6:
171-4.
21. Berguer R, Gutt CN. Laparoscopic colon surgery in the rat model. A preliminary report. Surg Endosc 1994;8:1195-7.
22. Berguer R, Gutt C, Stiegmann GV. Laparoscopic surgery in the rat. Description of a new technique. Surg Endosc 1993;
7:345-7.