논문 2015-52-7-18
실내외 환경에서 안정적인 자율 주행을 위한 스마트 휠체어 시스템 및 주행 기술 개발
( Development of Smart Wheelchair System and Navigation Technology For Stable Driving Performance In Indoor-Outdoor Environments )
이 래 경*, 오 세 영***
( Lae-Kyoung Lee
ⓒand Se-Young Oh )
요 약
본 논문에서는 사회적 약자(노약자, 장애인 등)들의 사회·경제적 삶의 질 향상을 위한 기술개발(Quality of Life Technology, QoLT)의 일환으로, 다양한 실내외 환경에 대해서 안정적이고 안전한 주행이 가능한 스마트 휠체어 시스템을 개발하고, 이를 효과적으로 운영하기 위한 주행 프레임워크를 제안한다. 특히, 휠체어 탑승자(장애인, 노약자)의 인지/조작능력 부족에 따른 자 동/수동 주행 시 편의성과 안전성을 보장하기 위해, 먼저 환경에 최적화된 센서들을 기반으로 사용자 중심의 스마트 휠체어 시스템을 개발하고, 다양한 주행 환경의 변화에 실시간 대응은 물론, 탑승시 안정성을 보장하기 위한 계층적 구조의 주행 프레 임워크를 제안, 적용함으로써 보다 효과적인 운영이 가능하도록 하였다. 제안된 방법들에 대한 다양한 실험들을 통해 개발된 스마트 휠체어 시스템과 주행 시스템에 대한 안전성은 물론 효율성을 증명, 확인할 수 있었다.
Abstract
In the present study, as part of the technology development (Quality of Life Technology, QoLT) to improve the socio-economic status of people with disabilities as an extension of these studies, we propose the development of the smart wheelchair system and navigation technology for stable and safe driving in various environments. For the disabled and the elderly make driving easy and convenient with manual/autonomous driving condition, we firstly develop the user-oriented smart wheelchair system with optimized sensors for environment recognition, and then we propose a navigation framework of a hierarchical structure to ensure real-time response, as well as driving stability when traveling to various environmental changes, and to enable a more efficient operation. From the result of several independent experiments, we ensure efficiency and safety of smart wheelchair and its navigation system.
Keywords: Smart wheelchair, Path Planning, RRT, Navigation, Sensor Fusion
Ⅰ. 서 론
지난 수십 년간 다양한 분야에서 로봇에 관련된 제어
* 학생회원, ** 정회원, 포항공과대학교 전자전기공학과 (Dept. of Electronic and Electrical Engineering, Pohang University of Science and Technology)
ⓒ Corresponding Author(E-mail: [email protected]) Received ; January 27, 2015 Revised ; June 5, 2015 Accepted ; July 2, 2015
및 센서 응용 기술들(모션제어, 센서 융합, 경로 계획, 위치 인식, 지도 작성 등)이 개발되어왔으며, 특히 최근 청소 로봇의 상품화와 더불어 안내/서비스 로봇을 통한 다양한 목적의 공공 서비스 사업을 통해 축척된 기술적 성과를 바탕으로, 우리 생활의 많은 부분에서 로봇 기 술들이 다양하게 활용되고 있다. 이런 상황에서 최근 몇 년간, 전 세계적으로 고령화 사회로의 진입과 그에 따른 웰빙(Well-being Life)에 대한 이슈로 인해 의료/복지에 대한 사회적 관심이 증가하고, 더불어 노약자/장애인들에
대한 관심과 배려 또한 증가됨에 따라, 그에 관련된 실버 /헬스 케어 산업 및 관련 연구들이 급격하게 증가하고 있는 추세이다. 이와 같은 전 세계적 분위기에 힘입어, 국내에서도 차세대 로봇 관련 응용 연구의 한 분야로써, 의료/재활/복지 분야에 관련된 연구들이 활발히 진행되 고 있는 실정이다. 특히, 의료 분야에 있어서는 수술 로 봇 “다빈치”와 간호 보조로봇 “PIRO M1”, 진단 로봇 등이 있으며, 재활 부분에서는 근력보조 로봇
“HEXAR”, 재활보조 로봇 등이 있으며, 이외에도 실버 도우미 로봇, 이송로봇 등이 대표적인 사례로 손꼽힌다.
이러한 분위기에 힘입어, 본 연구에서는 사회적 약자 인 “장애인과 노약자들”의 삶의 질 향상을 위해 사회적 이슈로 부각되었던 “이동권 보장”에 대한 선행 연구의 일환으로, 이송 수단으로써의 지능형 전동 휠체어의 개 발과 더불어 사용자 중심의 안전하고 편안한 주행 성능 을 보장할 수 있는 새로운 주행 기술들의 개발을 통해 서 보다 효과적인 스마트 휠체어 시스템을 개발하고자 한다.
스마트 휠체어에 관련된 다양한 국내외 연구 사례들
[1∼6]
중에서, 일본 Tsukuba 대학의 Masashi Yokozuka.
et. al[1]이 개발한 로봇형 휠체어 “Marcus" 는 3개의 레 이저 스캐너를 이용하여 Fast SLAM기반의 3D 지도 작성 이외에도, 안정된 주행 성능을 보장하기 위해 전 역 경로 생성 및 장애물 회피 (A*, Dynamic Window Approach[2])와 같은 기능들을 수행할 수 있는 휠체어기 반 주행 시스템을 제안하고 있다. 이뿐만 아니라, Lehigh 대학의 C. Montella et. al 연구 결과[3]의 경우, 안정적인 실외 주행을 위해 휠체어에 장착된 다수의 센 서들(Lider/GPS/ToF카메라 등)을 활용하여 사전에 랜 드마크 기반 지도를 생성하고, 여기에 계층적 구조의 경로 생성 방법(Dijkstra기반 전역 경로 생성, Energy cost 기반의 지역 경로 생성)을 통해 연산시간을 줄이 면서, 동적환경에 대한 효과적인 주행이 가능하도록 하 였다. 이외에도 MIT의 Intelligent wheelchair Project에 서도 사용자의 편의성을 바탕으로 안정적인 실내/외 주 행 성능을 스마트 휠체어에 대한 연구들이 진행 중에 있다. 반면, 국내의 경우는 아직 스마트 휠체어에 대한 연구의 초기 단계로써, 소수의 연구 실적과 함께 주로 전동 휠체어 설계[4], 영상 기반 주행[5] 및 HCI/HRI 분 야에 집중된 연구들이 주류를 이루고 있다. 다행히도 최근 들어, 탑승자의 안전을 고려한 장애물 회피 연구[6]
도 조금씩 진행되고 있는 상태이다.
본 논문에서는 이런 상황들을 고려하여, 기존 연구들 과는 다르게 각 환경에 최적화된 중/저가 센서들의 효 과적인 융합과 효율적인 활용 방안들을 제안하고, 이를 통한 탑승자의 안정적인 주행을 보장할 수 있는 최적화 된 스마트 휠체어 시스템을 개발하고자 한다. 여기에 최 신 IT기술들의 활용을 통해 보다 향상된 사용자 편의를 도모하면서, 본연의 목적인 실내외 환경에서 안전한 이 송 능력과 사용자 중심의 편안한 주행 성능을 보장하기 위한 개선된 주행 기술들을 제안하였다. 그리고 이런 주행 기술들을 통합/운영 관리하는 주행 프레임워크 (Framework)를 제안함으로써, 자율주행 휠체어 시스템 의 운영 효율성과 주행의 안정성을 동시에 보장할 수 있도록 하였다.
Ⅱ. 스마트 휠체어 시스템 및 주행 프레임워크 개발
1. 스마트 휠체어 시스템 개발
일반적으로 전동 휠체어의 경우, 기존 로봇들(실내외 이동로봇, 지능형 자동차)과는 달리 탑승자의 특성(인지 /대응 능력의 부족, 신체적 제약에 따른 조작 능력 미숙 등)을 감안한 사용자 중심의 시스템 설계가 필수적으로 이루어져야한다. 이를 위해 본 논문에서는 전동휠체어 의 원초적 기능인 병약한 탑승자의 단순한 이동/이송용 수단으로서의 역할 이외에도 보다 편안하고 안전한 주 행 성능을 보장하기 위한 시스템적 안정성을 최우선적 으로 고려하여 구성하도록 하였다. 먼저 그림 1a과 같 이, 상용 전동 휠체어 시스템을 개조하여 사용자의 수 동 조작뿐만 아니라, 여러 종류의 센서들을 장착하여 실내외 공간에서 안전한 자율 주행이 가능한 스마트 휠 체어 시스템을 개발하였다. 특히 휠체어의 주 사용 대 상이 노약자나 장애인임을 감안하여, 경제적 측면이나 주행 환경의 특수성(실내-복도/로비, 실외-도로/인도) 에 맞춰 가급적 불필요한 다수/고가의 센서를 배제하고, 환경에 최적화된 센서 선택 과정을 통해 보다 경량화된 스마트 휠체어 시스템의 구축이 가능하도록 하였다(그 림 1b).
개발된 휠체어 플랫폼에 대한 내부 구조를 살펴보면, 기존 상용 전동 휠체어를 기반으로 플랫폼의 모션/전원 /사용자 조작 모드 등과 관련된 기능을 담당하기 위한
(a) 제안된 스마트 휠체어 시스템
(b) 주요 시스템 구성 그림 1. 스마트 휠체어 시스템 구성 및 사양 Fig. 1. Smart wheelchair system configuration and
specifications.
32bit DSP기반의 하위제어기와 더불어 휠체어 시스템 동작의 총괄적 관리와 주행 알고리즘의 동작, 센서/모 션 데이터를 처리하는 SBC기반의 상위 제어기로 구성 된다. 특히 플랫폼의 운영에 필수적인 전원 관리(전원 분배 및 상태, 충전 여부 등)와 사용자 의도에 따른 주 행 모드 선택(급정지, 수동/자동 주행)에 관련된 기본적 인 기능들을 하위제어기에서 1차적으로 관리함으로써, 데이터의 분산 및 역할 분담을 통해 보다 빠른 대응과 전체 시스템상의 안정성을 확보하도록 하였다. 반면 상 위 제어기에서는 하위제어기로부터의 전달된 정보와 각 센서/장치들로부터 획득된 정보들을 바탕으로 주행 프 레임워크 기반의 휠체어 운영을 담당하도록 하였다. 또 한, 여기에 IT기반의 정보 활용 능력(실내 주행-CAD지 도, 실외 주행-Google/Naver 위성지도)과 LCD 터치 패 널을 활용한 사용자의 인터페이스 기능(주행 목적지 선 정, 휠체어의 현재 위치 및 시스템 상태에 대한 실시간 모니터링)을 통해, 사용자의 편의성을 향상시킨 스마트 휠체어 시스템 환경 구축이 가능하도록 하였다. 이렇게
그림 2. 스마트 휠체어 시스템의 주요 동작 구성도 Fig. 2. The main operating configuration of the smart
wheelchair systems.
개발된 스마트 휠체어 시스템은 다양한 목적/운영 방식 에 따른 시스템 확장 및 관리적인 측면의 편의성과 효 율성을 바탕으로, 실내외 환경에서 안정적이고 편안한 주행 기능의 수행을 위한 중요한 시스템적 역할을 담당 하고 있다.
2. 스마트 휠체어용 주행 프레임워크 및 효과적인 계층적 주행기술 개발
본 단락에서는 앞서 개발된 스마트 휠체어 시스템의 효과적인 운영과 다양한 환경에서 안정적인 주행 성능 을 보장하기 위한 연구로써, 스마트 휠체어용 주행 프 레임워크 (Smart wheelchair Navigation Framework, SNavF)와 계층적 주행 기술에 대한 설명을 한다.
그림 3. 제안된 스마트 휠체어 주행 프레임워크 Fig. 3. The proposed smart wheelchair navigation
framework.
가. 스마트 휠체어기반 주행 프레임워크
본 논문에서는 휠체어 시스템의 효율적인 운영과 안 정적인 주행 성능 관리를 위해, 그림 3과 같이 주행에 관련 기술들을 모듈화하여 관리/운영하는 스마트 휠체 어용 주행 프레임워크를 제안한다. 제안된 주행 프레임 워크를 바탕으로 사용자가 원하는 목적지를 선택하면, H/W모듈(센서, 플랫폼)로부터 얻어진 데이터들을 바탕
으로, 주행 환경 조건에 최적화된 경로 생성 방법과 장 애물 감지/회피 기술을 통해 편안하고 안전한 주행 경 로를 생성하고, 주행 중 위치 인식 모듈을 통한 현재 위 치 인식과 그에 따른 위치 보정 과정의 수행으로 보다 안전하게 목적지로의 이송 및 다양한 상황별 대응이 가 능하도록 하였다. 특히 이러한 모듈화된 주행 기술들로 구성된 주행 프레임워크 구조를 개발, 활용함으로써, 다 양한 목적/사용 센서에 적합한 주행 기술들의 선택/추 가하는 과정이 유연해지는 동시에, 하드웨어 플랫폼에 영향을 최소화함으로써 다용도/다목적 주행 모듈로써 활용성을 극대화 할 수 있도록 하였다.
나. 효과적인 계층적 주행 기술 개발
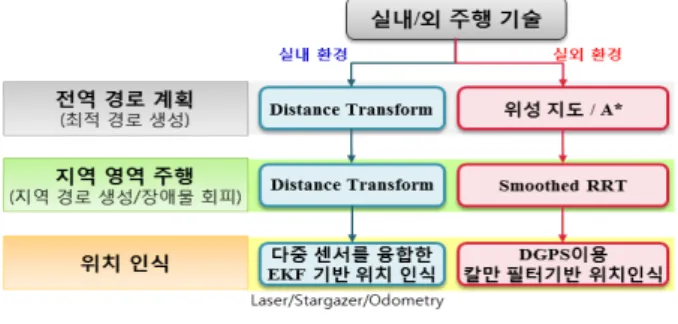
오랫동안 다양한 주행 기술들(Distance Transform, A*, RRT, PRM[7] 등)이 개발되어 왔고, 그 우수성들이 증명되었지만, 대부분의 기술들이 주행 환경의 다양성에 대한 일반화된 성능을 보장하기는 여러 가지 어려움이 존재하는 상황이다. 이러한 부분을 감안하여 본 논문에 서는 기존 단일 주행 기술의 한계성을 극복하기 위한 방법으로, 이종 혹은 동종의 주행 기술을 활용한 융합 형 주행 기술(Hybrid Navigation)을 제안하고, 그림 4와 같이 각 환경/센서에 맞춰 최적화된 주행 기술을 선택적 으로 운영하는 계층적 주행 관리 구조를 제안한다.
그림 4. 제안된 융합형 주행 기술 및 계층적 관리 구조 Fig. 4. The proposed hybrid navigation and hierarchical
management structure.
(1) 실내 주행 기술
일반적으로 사무실/복도/홀 영역들로 구분이 가능한 실내 환경은 근거리 2D 레이저 스캐너만으로도 충분히 인식 가능한 특성을 가진다. 이런 내용을 바탕으로 본 논문에서는 단일 레이저 스캐너만을 이용하여 실시간 전방 환경 모델링을 통해 전역 경로 생성과 위치 인식 과정을 수행한다. 특히 전역 경로 생성의 경우, 초기에
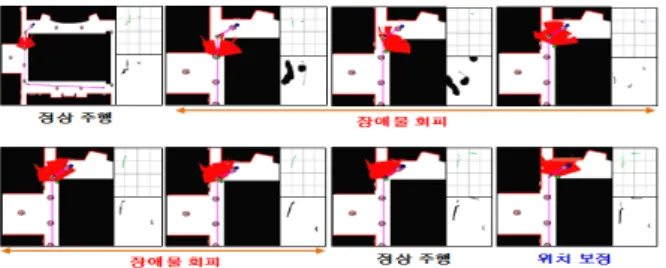
는 실내 주행 환경 지도의 제공 유무 및 환경적 특성에 따라 개선된 거리변환(Distance Transform, DT)기반 최단 경로 계획법[8]과 Line Portal기반 경로 계획법[9]중 에서 하나를 선택하여 적용하였으나, 대부분 환경 조건 에 선형적 경로와 최적화된 최단거리 생성이 가능한 개 선된 거리변환 기반의 경로 계획법을 개발하여 주로 사 용하였다. 그리고 주행 과정 중 지도상에 존재하지 않 는 정/동적 장애물에 대한 지역 경로 계획은 상황별 장 애물 회피 전략과 거리변환 기반의 장애물 회피 기술을 통해 최적화된 경로점들(waypoint)과 주행 방향을 생성 하고, 이를 토대로 회피 동작을 수행하게 된다. 그림 5 에서는 주행 환경에 대한 CAD지도가 주어졌을 때 자 체 제작된 지도 변환기를 통해 경로 계획용 지도로 변 환 후 경로 생성을 하는 과정과 거리변환 기반의 장애 물 회피에 관련된 최적화된 경로점들의 선정 결과를 보 여준다. 앞서 경로 계획 및 장애물 검출/회피 과정이 성 공적으로 진행이 되더라도, 주행 중 바닥면과의 마찰, 로봇의 회전/Odometry 불확실성 등에 의해 발생되는 로봇의 위치 및 방향 오차 문제가 원하는 목적지까지의 안전한 도착 여부에 중요한 영향을 미치게 된다. 이러한 문제를 해결하기 위해, 본 논문에서는 Extended Kalman filter(EKF)기반의 전역 위치 인식 기술[10]을 활 용한 방법을 기반으로, 필요시 Stargazer를 통해 경로 상에 부착된 랜드마크 정보로부터 로봇의 방향 보정하 는 방법을 선택적으로 융합하여 사용함으로써, 보다 안 정적인 위치/방향 개선이 가능하도록 하였다. 먼저 EKF 기반의 전역 인식 기술의 경우, 실내 환경이 직선(Line) 형태로 쉽게 모델링이 가능한 환경적 특성을 이용하여
그림 5. 실제 환경지도(CAD file)을 이용한 전역경로 생 성 및 장애물 회피 과정
Fig. 5. Global path planning and obstacle avoidance using actual environment map (CAD File).
추측 항법(Dead Reckoning)을 통한 odometry 정보로부 터 로봇의 현재 위치를 예측하고, 여기에 현 위치에서 레이저 스캐너로부터 획득된 환경 정보로부터 보정되어 야 하는 로봇의 위치/방향 보정값을 획득하게 된다. 특 히 실내 환경의 구조적 특성을 고려한 추출된 직선들의 특징 정보를 바탕으로, 지도상에 등록된 직선과의 매칭 과정(직선간의 각도, 거리, 중첩 비율 고려)을 통해 위치 인식 보정을 위한 유효한 직선들을 추출하고, 이를 통해 현재 로봇 위치에서의 정확한 위치 예측과 보정과정이 가능하도록 하였다.
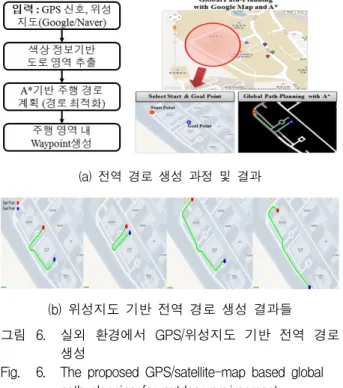
(2) 실외 주행 기술
실외 환경의 경우, 넓은 주행 공간적 특성 이외에도 일반적으로 다양한 장애물들이 빈번히 존재함에 따라 안정적인 지도 작성이 어렵다. 이에 본 논문에서는 DGPS 센서와 IT융합(위성지도-google/naver map)을 통해 별도의 지도 작성 없이도 효과적이고 안전한 실외 주행이 가능한 새로운 방법을 제안한다. 이를 위해 현재 위치에 대한 실시간 모니터링과 원하는 목적지 선택이 가능한 자체 개발된 GPS/위성지도 연동 S/W를 활용한 다. 먼저, 그림 6과 같이 희망 주행 영역이 포함된 위성 지도를 획득하고, 여기에 전처리 및 영역 분할 과정을 거쳐 지도 내 유효 주행 영역들(도로 영역)이 추출되면,
(a) 전역 경로 생성 과정 및 결과
(b) 위성지도 기반 전역 경로 생성 결과들 그림 6. 실외 환경에서 GPS/위성지도 기반 전역 경로
생성
Fig. 6. The proposed GPS/satellite-map based global path planning for outdoor environment.
경로 단순화과정(path pruning)이 추가된 개선된 A*기 법을 적용함으로써 목적지까지의 최단 경로를 생성하게 된다. 이렇게 얻어진 경로 정보로부터 일정 간격상의 경로점들을 추출하고, 실시간 3D PMD센서로부터 생성 된 지역 지도를 바탕으로 지역 주행 경로 생성 과정을 거치게 된다. 여기서 주행 시 사용자의 편안함과 안전 을 보장하기 위해, 빠른 경로 생성 능력과 부드러운 모 션 경로 생성이 가능한 Smoothed Rapidly-exploring random trees(S-RRT)방법을 개발, 적용하였다. 여기서 제안된 S-RRT방법의 경우, Single query기반 RRT[11]
를개선한 방법으로, 노드 등록 및 근접 이웃 탐색 과정 에서 KD-tree 활용하여 연산시간을 최소화하고, 여기에 경로 수렴율과 최단 경로 생성을 위한 다양한 방법들 (주행반경/목적지 방향성을 고려한 노드 각도 조건, 평 균 필터기반 노드 등록/확장, 목적지 주변에서 단순화 등)을 제안/적용한 방법으로, 개선된 경로 최적화 특성 (sub-optimal)을 바탕으로 최단 경로와 실시간 유선형 경로 생성이 동시에 가능한 특성을 가진다. 여기에 보다 강인하고 효과적인 경로 계획을 위해 “장애물 분포 및 회전 비율, 경로 길이, 연속된 경로 간 방향 일치성”의
(a) Smoothed RRT 과정
(b) PMD센서 기반 Smoothed RRT 경로 생성 결과 그림 7. 제안된 Smoothed RRT기반 경로 계획 및 생성
결과
Fig. 7. The proposed smoothed RRT-based path planning and trajectory generation results.
요소로 구성된 비용함수와 다수의 샘플 경로들에 대한 토너먼트 기반 최적 경로 선택 과정, 그리고 B-spline기 반 경로 보정을 추가적으로 적용함으로써, 앞서 제안된 RRT방법보다 한층 더 최적화된 유선형 주행 경로 생 성을 개발하였다. 그리고 이러한 일련의 과정들이 별도 의 장치 없이 실시간 처리(평균 20∼30ms)가 가능하게 함으로써 다양한 정/동적 환경에서 효과적인 대응이 가 능한 장점을 가진다.(그림 7). 이러한 주행 기술을 통해 얻어진 주행 경로의 경우, 불필요한 회전을 최소화하고, 주행 위험성이 존재하는 영역에 대한 사전 회피를 고려 한 최적화된 안정한 경로를 생성하도록 함으로써, 탑승 자의 심리적 편안함과 주행 안전성을 동시에 보장하여 보다 효과적인 휠체어기반의 주행 특성을 가질 수 있도 록 하였다.
Ⅲ. 실 험 및 성능 평가
제안된 방법들에 대한 효과적인 성능 평가를 위해, 먼저 시뮬레이션 환경기반의 1차적 성능 평가와 실제 휠체어 플랫폼을 통한 다양한 실내 환경에서의 실험들 을 병행하는 단계별 성능 평가를 수행하도록 하였다.
1. 시뮬레이션 기반 주행 성능 평가
제안된 방법들에 대한 성능 평가를 위해, PC환경에 서 실제 휠체어 플랫폼 및 사용 센서들과 유사하게 모 델링 된 주행 시뮬레이터를 개발하고 이를 활용하여 실 험들을 수행하였다. 먼저, 실내외 융합형 주행 기술의 경우, 시뮬레이터 상에서 평가용 지도들을 바탕으로 최 적 경로의 생성 유무 및 장애물 회피 여부, 경로 생성 시 소요 시간들에 대한 정량적 평가를 수행하고, 이를 토대로 기존 방법과 비교를 통해 그 우수성 유무를 평 가하도록 하였다.
가. 전역 경로 생성 실험
주어진 환경들에 대한 최적의 전역 경로 생성 여부를 효과적으로 판단하기 위해, 다양한 평가용 지도들 (25m×25m 크기)을 제작하거나, 실제 지도를 활용하여 평가를 진행하였다. 먼저 실내 주행 기술인 개선된 거 리변환 기반 전역 경로 실험의 경우, 그림 8a, 8b와 같 이 다양한 시뮬레이션 환경과 실제 환경 지도에 대해 안정적으로 최적화된 경로 생성 능력(연산시간 : 평균
(a) 개선된 거리변환을 이용한 전역 경로생성 결과 - 가상 지도
(b) 개선된 거리변환을 이용한 전역 경로생성 결과 - 실제 지도
(c) A* pruning 전역 경로 생성 결과 - 가상 지도
(d) Smoothed RRT 전역 경로 생성 결과 - 가상 지도 그림 8. 전역 경로 생성 결과
Fig. 8. Global path planning results.
항목 경로 거리 연산 시간
A* Prunning -5.68 % 평균 2 % S-RRT -24.59 % - 24.87 % 표 1. 제안된 전역 경로 생성법에 대한 성능 평가 Table 1. Performance evaluation of the proposed global
path planning method.
180ms, 경로 특성 : 선형 & 최적화된 최단 경로 생성) 을 보장하였다. 그리고 실외 주행 기술인 A* pruning방 법과 S-RRT 조합에 대해서는 타 논문의 방법들과 실 제적 비교가 어려운 상황을 고려하여, 앞서 과정과 같 이 주어진 가상지도들에 대한 성능평가와 더불어 기존 방법들과 상호 비교를 통해 적합성과 우수성 여부를 평가하였다. 그 결과, 제안된 방법들이 수행 속도면에서 나 생성 경로 거리에 있어 보다 개선된 성능을 확인할
수 있었다(그림 8c, 8d, 표 1.). 특히 실외환경 주행 시 요구되는 빠른 대응 능력과 효과적인 경로 생성 능력의 측면에서 일반적으로 검증된 A*와 제안된 S-RRT를 비교하면, A*대비 5%이내의 경로 차이로 최적 경로 생 성 능력을 가지며, A*대비 10배 속도를 가지는 동시에 기존 RRT대비 84%의 연산시간 단축과 25.59%의 경로 단축 성능을 보인다. 이런 결과를 바탕으로 제안된 RRT방법이 효과적인 최적 경로 생성 방법임을 충분히 증명할 수 있었다.
나. 장애물 회피/지역 경로 생성 실험
주어진 전역 경로를 바탕으로 경로 추종 시 발생하는 정/동적 장애물에 대한 회피와 위치 보정에 관련된 실 험을 수행하였다. 실내 주행의 경우, 그림 9a와 같이 주 행 상태에서 검출된 장애물에 대한 안정적인 회피 과정 수행과 더불어, 장애물 회피 이후 발생한 odometry오차 를 line 특징 기반 EKF 위치 인식 방법을 통해 효과적 으로 위치 보정을 수행하는 결과를 확인할 수 있었다.
반면 실외주행 기술의 경우, 공간적 특성상 DGPS 신호 기반의 위치 인식 방식을 감안하여, 앞서 위성지도로부 터 A*를 통해 추출된 전역 경로상의 지역 경로점들을 S-RRT를 통해 추종해가는 과정에서 발생하게 되는 장 애물 회피 및 경로 추종에 대한 실험을 수행하였다. 자
(a) 개선된 거리변환 기반 장애물 회피 및 위치 보정 결과
(b) PMD센서 기반 장애물 회피 경로 생성 결과 그림 9. 장애물 회피/지역 경로 생성 결과
Fig. 9. Obstacle avoidance/local navigation results.
항목 S-RRT VFH
연산 시간 2.956 ms 4.132 ms
경로 길이 29.25 m 30.67 m
수렴율 100% 국부 최소화 발생
그림 10. 장애물 회피/경로 주행 성능 비교 (S-RRT vs. VFH)
Fig. 10. The performance comparison of obstacle avoidance /path-following (S-RRT vs. VFH).
체 성능 평가 이외에 효과적인 평가를 위해 기존의 대 표적 장애물 회피 기법인 벡터장 히스토그램(Vector Field Histogram, VFH)[12]과의 비교 실험을 통해 그 성 능을 평가하였다. 그 결과, 그림 10과 같이 연산시간 (28%감소), 경로 수렴율(100%) 그리고 경로 길이(4.6%
감소) 등 모든 부분에서 기존 VFH보다 우수한 성능을 보이며, 이를 통해 동적 장애물에 대해서도 안정적인 장애물 회피 성능과 더불어 보다 안정적이고 부드러운 주행 경로 생성이 가능한 지역 경로 계획법임을 확인할 수 있었다.
2. 스마트 휠체어 기반 주행 성능 평가
마지막으로 앞선 시뮬레이션 실험과는 달리, 실제 휠체어 플랫폼에 통합된 상태에서 별도의 통제 없는 실내 환경들(Postech LG동, KIRO 복도)에서의 다양한 조건의 실험들(주행 거리, 장애물 회피, 탑승자 유무 등)을 수행함으로써 안정된 주행에 대한 통합적인 성 능 평가를 수행하였다. 이를 위해 먼저 비교적 중/단거 리 주행의 경우, 동적 장애물이 존재 확률이 낮다는 가 정 하에서 목적지 도착 성공 여부에 따른 주행 성능의 평가를 하였으며, 장거리 주행의 경우는 장애물 존재에 따른 안정적인 장애물 회피 동작과 위치 보정 능력까 지를 포함한 최종 목적지 도착 성공률을 평가하였다.
그 결과, 그림 11과 표 2와 같은 다양한 조건들에서 안 정된 주행 성능을 증명하였고, 목적지 도착 성공률에서 도 탑승자/장애물 존재 유무에 상관없이 위치 인식 모 듈 (EKF기반 Localization)을 통해서 여러 목적지에 대
(a) 탑승자 부재 (단거리/편도)
(b) 탑승자 존재 (중거리/편도)
(c) 장애물 회피 및 최종 목적지 도착 실험 (장거리/편도) 그림 11. 다양한 주행 조건에 따른 성능 평가
Fig. 11. Performance evaluation in various driving conditions.
항목 도착 성공율 위치 오차
주행 성능 85%(17/20) ±10cm (최대 ±15cm) 표 2. 목적지 도착 성공률 및 위치 오차 범위 Table 2. Destination arrival rate and position error.
해 우수한 도착 성능을 확인할 수 있었다. 그리고 최종 목적지의 위치 오차 범위도 전반적으로 안정적인 범위 (±10cm이내)내에 존재함을 통해 위치 인식 성능의 안 정성도 함께 검증 할 수 있었다. 이러한 실험 결과들을 바탕으로 제안된 시스템과 방법들이 탑승자의 주행에 필요한 목적지까지의 안정된 이송 능력 능력과 더불어, 최적화된 경로와 편안한 주행 경로 생성을 바탕으로 위치 안정성까지 보장해줌으로써, 스마트 휠체어 시스 템과 그에 필요한 주행 프레임워크로서의 우수성을 확 인할 수 있었다.
Ⅳ. 결 론
본 연구는 탑승자의 편의성과 안정성을 고려하는 동 시에, 주행 환경에 최적화된 센서들이 장착된 스마트 휠체어 시스템을 개발하고, 효과적인 주행을 위해 융합 형 경로 생성/장애물 회피/위치보정 방법 등을 이용한 계층적 주행 기술 프레임워크를 제안하였다. 특히 목적 지까지의 안정된 탑승자 이송 능력과 더불어, 주행 시 탑승자의 편안함과 안전성을 중요시하는 효과적인 경로 생성 및 주행 능력을 바탕으로 휠체어용 주행 시스템으 로써의 성능을 증명하였다. 제안된 방법들은 시뮬레이 션기반 성능 평가와 실제 제작된 휠체어 플랫폼을 통해 서 그 우수성을 검증/확인할 수 있었으며, 앞으로 보다 다양한 실내외 환경에 대한 성능 개선과 더불어 최적/
경량화된 스마트 휠체어 시스템을 구축할 예정이다.
REFERENCES
[1] Yokozuka, M., Suzuki, Y., Hashimoto, N., Matsumoto, “Robotic Wheelchair with Autonomous Traveling Capability for Transportation Assistance in an Urban Environment,” Proc. of IEEE/RSJ Int. Conf. on Intelligent Robots and Systems, pp. 3838-3844, 2012.
[2] D. Fox, W. Burgard, and S. Thrun, “The dynamic window approach to collision avoidance,” IEEE Robotics and Automation Magazine, Vol.4, No.1, pp.23-33, 1997.
[3] C. Montella, T. Perkins, J. R. Spletzer and M.
Sands, “To the Bookstore! Autonomous Wheelchair Navigation in an Urban Environment,” in the Int. Conf. on Field and Service Robotics (FSR), pp.249-263, 2012.
[4] J. M. Kang, S. I. Kang, J. H. Kim, H. S. Ryu, and Sang Bae Lee, “Design & fulfillment of multi-functional electric wheelchair,” Proceedings of the IEEK Summer Conference, Vol 25, no.1, pp.261-264, 2002.
[5] W. K. Song, H. Y. Lee, J.S. Kim, and Z. N.
Bien, “Color Vision System for Intelligent Rehabilitation Robot mounted on the Wheelchair,” Journal of the Institute of Electronics Engineers of Korea, Vol 35-S, no.
11, pp.75-87, 1998.
[6] Y. H. Kim, T.S. Yoon, and J.B. Park,“Collision
저 자 소 개 이 래 경(학생회원)
1999년 부산대학교
전기공학과 학사 졸업.
2001년 부산대학교
전기공학과 석사 졸업.
2001년∼2009년 ㈜동부로봇/
㈜)dU로봇 외 수석 연구원 근무.
2009년∼현재 포항공과대학교 전자전기공학과 박사 과정.
<주관심분야 : 지능로봇, 영상처리/패턴인식, HRI, 임베디드 시스템>
오 세 영(정회원) 1974년 서울대학교
전자공학과 학사 졸업.
1978년 Case Western Reserve Univ. 전자공학과
석사 졸업.
1981년 Case Western Reserve Univ. 전자공학과 박사 졸업.
1981년∼1984년 University of Illinois 조교수.
1985년∼1988년 University of Florida 조교수.
현재 포항공과대학교 전자전기공학과 정교수.
<주관심분야 : 신경망, 진화연산, 이동로봇, 지능 화 자동차, 지능시스템>
Avoidance Algorithm of an Intelligent Wheelchair Considering the User’s Safety with a Moving Obstacle,” Journal of Institute of Control, Robotics and Systems, Vol 19, no. 10, pp. 936-940, 2013.
[7] L. E. Kavraki, P. Svestka, J. C. Latombe, and M. H. Overmars, “Probabilistic roadmaps for path planning in high-dimensional configuration spaces,” IEEE Trans. on Robotics and Automation, Vol.12, Issue 4, pp. 566-580, 1996.
[8] R. A. Jarvis, “Distance Transform Based Collision-Free Path Planning for Robot,”
Advanced Mobile Robots, World Scientific Publishing, pp.3-31, 1994.
[9] D. S. Baek, J. G. Kang, S.Y. An, and S.Y. Oh,
“Line-segment based Global Path Planning for Mobile Robot,” The 5th International Conference on Ubiquitous Robots and Ambient Intelligence, November, pp. 15-17, 2008.
[10] W. Burgard, D. Fox, and S. Thrun,
“Probabilistic Robotics”. MIT Press, 2005.
[11] Steven M. Lavalle. “Rapidly-exploring random trees: A new tool for path planning,” Technical report 98-11, Iowa State University, 1998.
[12] J. Borenstein and Y. Koren, “The vector field histogram - fast obstacle avoidance for mobile robots,” IEEE Transaction on Robotics and Automation, vol. 7, no. 3, pp. 278-288, 1991.