항공 라이다 데이터를 이용한 동적 가변 윈도우 기반 지형 분류 기법
A Dynamic Variable Window-based Topographical Classification Method Using Aerial LiDAR Data
성 철 웅
*
이 성 규**
박 창 후***
이 호 준****
김 유 성*****
Chul Woong Sung Sung Gyu Lee Chang Hoo Park Ho Jun Lee Yoo-Sung Kim
요 약 본 논문에서는 항공 라이다 데이터를 이용하여 지형의 유형을 분류하는 과정에서 지형의 특 성에 따라 지형 분류의 판정 단위를 가변적으로 변화시키는 동적 가변 윈도우 기반 지형 분류 기법을 제 안한다. 제안된 동적 가변 윈도우 기반 지형 분류 기법에서는 지형의 특성과 반복 패턴에 따라 지형 분 류의 판정 단위를 가변적으로 결정하여 지형 분류에 소요되는 시간을 감소시키고자 하였다. 또한, 본 논 문에서는 실험을 통하여 동적 가변 윈도우 기반 지형 분류 기법의 시간효율과 정확도를 분석하고 최적의 최대 판정 윈도우 크기를 제시하였다. 실험 결과에 따르면 제안된 동적 가변 윈도우 기반 지형 분류 기 법은 고정 윈도우 크기를 이용하는 기법과 유사한 정도의 정확성을 유지하면서도 빠른 지형 분류가 가능 한 것으로 판명되었다.
키워드 : 항공 라이다, 지형 분류, 동적 윈도우, 데이터마이닝
Abstract
In this paper, a dynamic variable window-based topographical classification method is proposed which has the changeable classification units depending on topographical properties.In the proposed scheme, to improve the classification efficiency, the unit of topographical classification can be changeable dynamically according to the topographical properties and repeated patterns. Also, in this paper, the classification efficiency and accuracy of the proposed method are analyzed in order to find an optimal maximum decision window-size through the experiment. According to the experiment results, the proposed dynamic variable window-based topographical classification method maintains similar accuracy but remarkably reduce computing time than that of a fixed window-size based one, respectively.
Keywords : Aerial LiDAR, Topographical Classification, Dynamic Window, Data-mining
본 연구는 국토해양부 첨단도시기술개발사업 - 지능형국토정보기술혁신 사업과제의 연구비지원(07국토정보C03)에 의해 수행 되었습니다.
*****
인하대학교 정보공학과 석사과정 [email protected]
*****
인하대학교 정보공학과 석사과정 [email protected]
*****
인하대학교 정보공학과 석사과정 [email protected]
*****
인하대학교 정보공학과 석사과정 [email protected]
*****
인하대학교 정보공학과 교수 [email protected](교신저자)
1. 서 론
국토의 상황을 효과적으로 파악하고 이용하기 위 해 도시개발, 환경 변화, 재해 등에 의한 국토의 변 화를 종합적으로 파악하고 관리하기 위한 국토 모 니터링의 필요성이 부각되고 있다. 이러한 국토모니 터링 시스템을 위해서는 지형의 유형 구분 및 구조
물 인식이 중요하다[9,14]. 최근 국내에서는 지형 정
보 취득을 위해 기존의 항공 사진측량 기술에 비해
저비용이며, 높은 정확도를 특성으로 갖는 항공 라
이다(LiDAR : Light Detection and Ranging) 기술
을 이용하여 지형 정보를 취득하는 빈도가 증가하
고 있는 추세이다[8]. 항공 라이다 기술은 항공기로
부터 발사된 레이저 광선이 항공기에 부착된 센서
에 도달한 시간을 측정하여 지상 측량지점의 고도 값뿐만 아니라, 지상의 목표물에서 반사되는 레이저 광선의 반사 강도(intensity)와 반사 회수를 함께 측 정하여 지형 정보를 취득하는 기술이다[8,10]. 일반적 으로 항공기를 이용하여 넓은 지역을 1개이상/1㎡
의 점밀도로 측량하기 때문에 항공 라이다 데이터 는 대용량이다[15,16]. 따라서 항공 라이다 데이터를 이용하여 지표점을 추출하거나 지형의 유형을 분류 하는 기존의 연구에서는 분류의 정확도를 잃지 않 으면서도 연산량을 줄일 수 있는 방법을 찾으려는 시도를 하고 있다[1,4,6,11,12,13].
기존의 지표점 추출이나 지형의 유형을 분류 하 는 방법들은 항공 라이다의 측량 지점을 기준으로 지형의 유형을 파악하는 ‘점 기반 분류 기법’으로 분류할 수 있다. 점 기반 분류 기법들은 각 측량 점 들에 대해서 주변 점들과의 관계나 사행도 등의 특 징들을 이용하여 지표점을 추출하거나 지형의 유형 을 분류한다[2,5]. 그러나 대용량 라이다 데이터의 측량점 단위로 지형 분류를 하기 위해서는 최소한 점의 개수에 비례한 계산량이 필요하기 때문에 정 교한 분류 기준 및 복잡한 분류 방법을 사용하기가 어려운 실정이다[13].
따라서 점기반 지형 분류 기법의 문제점인 연산 량의 비효율성을 개선하기 위하여 항공라이다 데이 타의 측량점들을 클러스터링하여 면을 인식하는 ‘패 치 기반의 분류 방법’이 제안되었다[6,13]. [6]과 [13]은 이웃한 유사 측량 점들을 그룹화하여 기초패 치를 생성하고 다시 그 기초패치들을 클러스터링하 여 지표면을 구분하거나 건물의 지붕을 추출하는 기법을 제안하였다. 그러나 이러한 클러스터링을 이 용하는 방법들 역시 모든 측량점들을 이용하여 초 기 패치를 생성해야 하기 때문에 많은 계산량이 필 요하고, 생성한 초기 패치들을 다시 클러스터링 하 는 과정에서도 반복적인 클러스터링 작업이 이루어 지기 때문에 처리 시간의 효율성을 극대화하지 못 하였다.
최근에는 지형 분류의 효율성을 증진하기 위한 일환으로 고정된 크기의 윈도우 단위(셀 또는 타일 이라고 함)로 지형의 유형을 분류하는 고정 윈도우 크기 기반의 지형 분류 기법(약칭 ‘고정 윈도우’)들 을 제안하였다[1, 4, 11, 12]. 고정 윈도우 기반의 지 형 분류 기법에서는 항공 라이다 데이터 측량점들 을 고정된 크기의 윈도우 단위로 구분한 후, 윈도우
내부에 포함된 측량점 데이터들의 특징들을 이용하 여 윈도우 단위로 지형의 유형을 분류한다. 그러나 이러한 고정 윈도우 기반의 지형 분류 기법들은 지 형의 특성 또는 객체의 크기 등에 관계없이 동일한 크기의 윈도우를 사전에 결정하여 지형 분류에 사 용하기 때문에 비효율적일 수 있다. 예를 들어, 넓 은 지역의 지형을 분류하기 위해 상대적으로 작은 고정 윈도우 크기로 분류하게 되면 여러 개의 윈도 우를 이용하여 반복적으로 수행해야 하기 때문에 비효율적인 처리 시간이 소요된다. 반대의 경우로, 다양한 유형의 작은 지형이 복잡하게 혼합되어 있 는 경우에 큰 크기의 고정 윈도우로 분류하게 되면 하나의 윈도우 내에 다양한 지형의 특성들이 복합 적으로 포함될 수 있기 때문에 정확한 지형 분류가 어렵게 된다. 이와 같은 이유로 인해 지형 분류를 할 때에는 지형의 크기 및 반복 패턴에 따라 적절 한 크기의 윈도우를 이용해야 한다.
본 논문에서는 기존 지형 분류 기법들의 이러한 문제점들을 해결하기 위한 방안으로 지형의 크기 및 반복 패턴에 따라 지형분류를 위한 판정 윈도우 (decision window)의 크기를 변화시킨 동적 가변 윈도우 기반 지형 분류 기법(약칭 ‘동적 윈도우 기 법’)을 제안한다. 이때 윈도우에 포함된 모든 점들 을 이용할 경우에는 기존의 연구들과 마찬가지로 시간적인 효율을 얻을 수 없기 때문에 윈도우의 크 기에 관계없이 지형 분류에 동일한 시간이 소요되 도록 하기 위해 판정 윈도우내의 항공 라이다 점 데이터를 대상으로 샘플링 과정을 진행한다. 따라서 본 논문에서 제안하는 동적 가변 윈도우 기반 지형 분류기법은 항공 라이다 데이터를 이용하여 지형의 분류 및 구조물 인식을 위한 기존 연구들에 비하여 분류에 사용되는 점의 개수가 줄어들기 때문에 소 요되는 시간을 단축시킬 수 있다. 이를 실험적으로 입증하기 위해 본 논문에서는 전라남도 장성지역의 항공 라이다 데이터를 이용하여 제안된 동적 가변 윈도우 기반 지형 분류기법과 고정 윈도우 기반 지 형 분류기법과 지형분류에 대한 시간 효율 및 정확 도를 비교하였다. 또한, 실험 결과를 이용하여 동적 가변 윈도우로 지형 분류 할 때 사용할 최적의 최 대 윈도우의 크기를 제시하였다.
본 논문의 구성은 다음과 같다. 2절에서는 기존
지형 분류 기법들을 간단히 소개하고 이들의 문제
점을 정리하였다. 3절에서는 본 논문에서 제안하는
패치기반 기법 고정 윈도우 기반 기법 장점 패치 생성을 통해 연산에 사용하는 개체의 수를
감소시킴
점 데이터의 중복 연산을 제거함
단점 동일한 개체에 대한 반복적인 작업이 필요하므로 계산량이 증가함
지형의 크기 및 반복 패턴에 관계없이 고정된 크기 의 윈도우를 사용하여 분류 시간 측면에서 비효율적
표 1. 기존 지형 분류 기법의 비교
동적 가변 윈도우 기반 지형 분류 기법을 자세하게 소개하고 4절에서는 제안된 지형 분류기법의 소요 시간과 분류 정확률에 대한 평가를 위한 실험 결과 를 설명하며 5절에서는 결론 및 향후 연구를 소개 한다.
2. 관련 연구
점 기반의 지형분류 기법 보다 효율적인 지형 분 류를 위해서 항공 라이다 데이터에 포함된 위치 좌 표, 고도 값, 레이저의 반사강도 등을 이용하여 클 러스터를 구성하는 방법 또는 고정 윈도우 크기의 셀 단위로 지형의 유형을 분류하는 방법들이 개발 되고 있다[1,4,6,13]. 항공 라이다 점 데이터에 대해 클러스터링 기법을 이용하여 패치를 생성하는 방법 (약칭 ‘패치기반 지형 분류 기법’)들을 살펴보면, [13]은 측정 점간의 인접성을 기준으로 주변의 점들 을 그룹핑하여 초기패치를 생성하고 연결성과 돌출 성을 기준으로 초기패치를 성장시켜 표면패치를 생 성하고, 표면집단의 돌출성과 면적 등을 고려하여 지표면을 구분하는 기법을 제안하였다. 이러한 방법 은 인접한 점들의 특성을 고려하여 패치를 생성하 기 때문에 블런더의 영향을 덜 받아 안정적인 결과 를 획득 할 수 있다. 그러나 측정 점들 사이의 인접 성을 기준으로 그룹핑하여 초기 패치를 생성하는 단계와 초기 패치를 성장시키는 단계에서 점 단위 로 인접성을 판단해야 하기 때문에 많은 연산과 저 장 공간이 필요한 단점을 가지고 있다. [6]은 인접 점들을 이용하여 평면 패치를 구성하고 클러스터링 기법 중 하나인 K-means를 적용시켜 반복적인 클 러스터링 과정을 통하여 평면 패치들을 면으로 묶 어 건물의 구성면을 추출하는 기법을 제안하였다.
그러나 이러한 방법은 초기에 생성된 클러스터의 숫자와 중심점 선택에 따라 다른 클러스터링 결과 가 나올 수 있기에 클러스터의 초기 중심점을 잘 선택해야 한다는 부담을 갖고 있다. 이러한 패치기
반 방법들은 연산에 사용하는 개체의 수가 줄어들 었다고 볼 수 있지만 클러스터링 알고리즘을 수행 하면서 동일한 개체에 대해서 반복적인 작업이 수 행되기 때문에 많은 계산량이 필요하게 된다.
고정 윈도우 크기로 지형 분류를 하는 방법을 살 펴보면, [1]은 라이다 데이터를 이용하여 0.5m의 크 기로 투영한 후 3×3 크기와 5×5 크기의 윈도우 크 기로 나누어 17개의 멀티 에코에 관한 특징과 4개 의 전체 파형(full-wave)에 관한 특징들을 생성한 다. 이를 기준으로 앙상블 기법의 하나인 랜덤 포레 스트(random forest)를 이용하여 지형의 유형을 빌 딩, 초목, 자연적인 땅과 인위적인 땅의 4개 영역으 로 구분하는 분류모델을 제안하였다. [4]는 라이다 데이터들을 계산하는 특징들에 따라 5m 단위 또는 10m 단위의 고정된 크기의 한 변을 갖는 셀로 구분 하였다. 그러나 이와 같이 고정 윈도우를 사용하는 방법들은 특징 계산에 전체 점들을 이용하기 때문 에 지형의 유형을 분류하기 위해서 많은 계산량이 필요하고 결과적으로 지형 분류에 소요되는 시간이 길어지기 때문에 실시간 온라인 서비스가 어려워질 수 있다. 이러한 시간 소요의 문제점을 줄이기 위하 여 [12]는 라이다 데이터를 이용하여 전체의 지형을 10m×10m의 고정된 크기로 분할하고 각각의 타일 에 포함된 점들의 높이와 반사값 등의 특징 값을 계산하여 지형을 분류하였다. 이때, 타일에 포함된 점들을 전부 사용하는 대신 랜덤 샘플링 기법을 이 용하여 일정한 비율로 샘플링 하여 정확도의 손실 을 최소화 하면서 빠른 처리가 가능하도록 하여 하 나의 타일내의 점들 중 40~50% 정도만 사용하였 을 때 85%의 예측 정확률을 가지고 약 4배 빠르게 분류 할 수 있는 것으로 분석하였다. 그러나 이와 같이 기존의 고정된 크기의 단위 윈도우를 사용하 는 방법들은 지형의 크기 및 반복패턴과 관계없이 분류에 일정한 시간이 소요돼서 비효율적임을 알 수 있다.
기존 지형 분류 기법들을 정리하면 표 1과 같다.
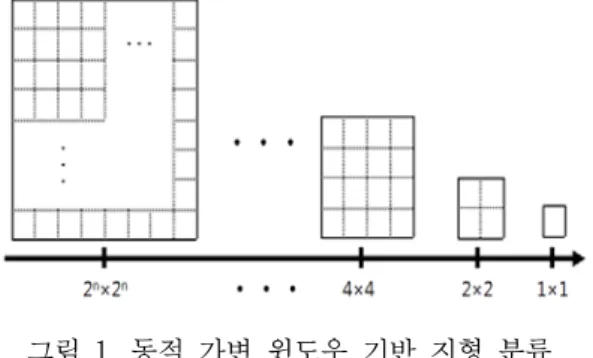
그림 1. 동적 가변 윈도우 기반 지형 분류 기법에서의 윈도우 크기 변화 패치 기반 지형 분류 기법에서는 패치 생성을 통해
연산에 사용하는 개체의 수를 감소시켰으나, 동일한 개체에 대한 반복적인 작업이 필요하기 때문에 계 산량이 증가할 수 있다. 또한, 고정 윈도우 기반 지 형 분류기법에서는 윈도우 단위로 점 데이터를 분 할하여 중복 연산을 제거하였으나 지형의 크기 및 반복 패턴에 관계없이 고정된 크기의 윈도우를 사 용하여 지형 분류를 실시하기 때문에 분류 시간 측 면에서 비효율성 문제가 발생할 수 있다.
3. 동적 가변 윈도우 기반 지형 분류 기법
본 절에서는 지형 분류의 처리 시간 효율성을 개 선하기 위해 지형의 크기 및 반복 패턴에 따라 지 형분류에 사용되는 판정 윈도우의 크기를 가변적으 로 변화시킬 수 있는 동적 가변 윈도우 기반 지형 분류 기법을 제안한다.
3.1 동적 가변 윈도우 기반 지형 분류 기법의 개요 동적 가변 윈도우 기반 지형 분류 기법에서는 판 정 윈도우의 크기를 가변적으로 변화시키며 동일한 유형의 넓은 지형일 경우에는 큰 판정 윈도우를 이 용하고 반대로 작은 서로 다른 지형이 복잡하게 섞 여 있는 경우에는 작은 판정 윈도우를 이용하여 지 형 분류를 실시한다. 따라서 고정된 크기의 작은 윈 도우를 이용하여 반복적으로 지형 분류를 실시하는 고정 윈도우 기반 지형 분류 기법보다 큰 판정 윈 도우를 이용하여 지형 분류를 할 수 있기 때문에 지형분류를 하는 횟수가 감소하여 지형 분류의 처 리 비용을 절약할 수 있게 된다.
그림 1은 동적 가변 윈도우 기반 지형 분류 기법 에서 사용하는 판정 윈도우의 크기 변화를 개념적 으로 보여주고 있다. 먼저 지형분류의 실시 횟수를 줄이기 위해 2
n⨯2
n크기로 사전에 정해진 최대 윈도 우(maximum window)를 기준으로 지형 분류를 시 도한다. 만일 현재의 최대 윈도우의 지형을 3.2절에 서 소개할 데이터마이닝 기법을 이용한 지형 분류 기로 분석하여 초지, 수목, 건물, 도로, 수역(강 또는 호수) 중에 하나로 구성된 단일 지형으로 분석되면 현재의 최대 윈도우를 판정 윈도우(decision window)로 결정하여 해당 윈도우의 전체 지형을 분류하고 만일 여러 지형이 복합된 복합 지형으로 분석되면 최대 크기의 현재 윈도우를 2
n-1⨯2
n-1크
기의 윈도우 4개로 분할하여 재귀적으로 지형 분류 를 시도한다. 재귀 알고리즘에서 지형 분류에 사용 하고 있는 크기의 윈도우를 현재 윈도우(current window)라고 한다. 재귀 알고리즘에서 현재 윈도우 단위로 지형 분류를 하여 단일 지형인 것으로 분석 되면 현재 윈도우를 판정 윈도우로 결정하여 지형 을 분류하고 재귀 호출을 탈출하며 만일 현재 윈도 우가 복합 지형으로 분석되면 다시 현재 윈도우를 4개로 분할하여 재귀적인 지형 분류를 실시한다. 이 러한 재귀적 지형 분류는 현재 윈도우가 사전에 정 한 단위 윈도우(unit window) 하나로 구성된 경우 를 기저 경우(base case)로 하여 재귀호출을 탈출하 게 된다.
동적 가변 윈도우 기반 지형 분류 기법의 재귀 알고리즘에서는 현재 윈도우가 최대 크기 윈도우로 시작하여 재귀 호출을 할 때마다 1/4로 작아진 윈 도우를 기준으로 분류하며 기저의 경우로 현재 윈 도우가 단위 윈도우 크기인 경우에는 추가적인 분 할 없이 지형 분류기를 사용하여 지형을 분류하고 재귀 호출을 중단하게 된다. 단위 윈도우의 크기는 해당 윈도우의 지형이 복합 지형으로 분석되는 경 우에도 포함된 라이다 점 데이터의 수가 많지 않아 적절한 양의 분석 처리를 통해 향후 경계선 및 객 체를 쉽게 구분할 수 있도록 정해야 한다. 본 논문 에서는 단위 윈도우의 크기로서 [11]에서 지형의 유 형을 분류하기 위해 사용한 윈도우 중에서 제일 작 은 크기인 5m×5m를 사용하였다.
본 연구에서 제안한 동적 가변 윈도우 기반 지형
분류 기법의 성능은 최대 윈도우의 크기인 2
n⨯2
n에
의해 영향을 받을 수 있다. 본 연구에서는 실험을
통해서 최적의 최대 윈도우 크기를 결정하였으며,
이에 대한 소개는 4절에서 자세하게 소개한다.
알고리즘 DynamicRecursive (LeftTopX, LeftTopY, RightBottomX, RightBottomY) 1 WS = LeftTopX - RightBottomX; // 현재 윈도우의 한 변의 길이
2 if (WS = 단위 윈도우 한 변의 길이) // 현재 윈도우가 단위 윈도우 크기인 경우 3 {
4 현재 윈도우 내 점 데이터들의 특징 값 계산;
5 지형 분류기를 이용하여 현재의 단위 윈도우에 대한 지형 클래스 결정;
6 }
7 else //현재 윈도우가 단위 윈도우 크기가 아닌 경우 8 {
9 샘플링을 적용하여 점 데이터들을 선정하여 특징 값 계산;
10 지형 분류기로 현재 윈도우의 지형 클래스 분석;
11 if (현재 윈도우가 단일 지형으로 분류) // 현재 윈도우가 단일 지형인 경우 12 {
13 현재의 윈도우를 분석된 단일 지형의 유형으로 결정;
14 } // 단일 지형 처리 불럭
15 else // 현재 윈도우가 복합 지형인 경우 16 {
17 WS = WS / 2; // 분할을 위해 현재 윈도우의 한 변의 길이를 축소 18 // 4개의 분할된 서브 윈도우를 기준으로 각각 재귀 호출
19 DynamicRecursive (LeftTopX, LeftTopY, LeftTopX+WS, LeftTopY+WS); // 1사분면 20 DynamicRecursive (LeftTopX+WS, LeftTopY, RightBottomX, LeftTopY+WS); // 2사분면 21 DynamicRecursive (LeftTopX, LeftTopY+WS, LeftTopX+WS, RightBottomY); // 3사분면 22 DynamicRecursive (LeftTopX+WS, LeftTopY+WS, RightBottomX, RightBottomY); //4사분면 23 } // 복합 지형 처리 불럭
24 }
End DynamicRecursive
그림 2. 동적 가변 윈도우 기반 지형 분류 기법에 사용하는 재귀적 지형 분류 알고리즘 3.2 재귀적 지형 분류 알고리즘
동적 가변 윈도우 기반 지형 분류 기법은 전체 지형의 좌측 상단에서부터 오른쪽 방향으로 차례대 로 각각 최대 윈도우 크기의 영역에 대해서 그림 2 에서 소개한 재귀적 지형분류 알고리즘을 적용해 지형의 유형을 분류한다. 만일 분류가 안 된 첫 번 째 줄의 남아있는 오른쪽 영역이 최대 윈도우 크기 보다 작을 경우 단위 윈도우 크기로 지형의 유형을 분류한다. 이렇게 첫 번째 줄의 지형에 대해서 분류 를 완료하면 다음 행의 좌측 상단에서부터 위와 같 은 순서로 지형의 유형을 분류한다. 이와 같은 방법 으로 전체 지형에 대해서 유형을 분류한다.
그림 2의 재귀적 지형 분류 알고리즘은 우선 지 형 분류를 해야 하는 현재 윈도우의 좌측 상단 꼭 지점의 위치 좌표 (LeftTopX, LeftTopY)와 우측 하단 꼭지점의 위치 좌표 (RightBottomX, Right- BottomY)를 입력 매개 변수로 전달 받는다. 입력된 매개 변수 값을 이용하여 현재 윈도우의 크기 WS 를 구한다. 만일 재귀적 지형분류 알고리즘이 처리
하고 있는 현재 윈도우의 크기가 단위 윈도우의 크 기라면 라인 번호 3∼6의 처리 불럭과 같이 현재 윈도우 내에 포함된 라이다 점 데이터들로부터 특 징 값을 계산하고 지형 분류기 모델을 이용하여 현 재의 단위 윈도우에 대한 지형 클래스를 결정한다.
만일 현재 윈도우가 단위 윈도우의 크기가 아니 라면 라인 번호 8∼24의 처리 불럭을 실행한다. 즉, 이 경우에는 적정 처리 시간을 위해 현재 윈도우에 포함된 모든 측정점 데이터를 이용하는 대신에 샘 플링을 실시한다. 샘플링은 윈도우의 지형을 분류하 는데 필요한 점 데이터의 수를 줄여서 지형 분류를 위한 소요시간을 줄이기 위해 사용한다. 본 연구에 서 사용한 샘플링 방법은 전체 지형을 5m×5m의 단 위 윈도우로 분할했을 때, 단위 윈도우에 속해 있는 점 데이터의 평균 숫자만큼 현재 윈도우 내의 점 데이터를 랜덤하게 선택하였다.
현재 윈도우에 대한 특징 값을 계산하고 지형 분
류 모델을 이용하여 현재 윈도우의 지역이 단일 지
형인지 복합 지형인지를 분석한다. 만일 현재 윈도
고도관련 특징 설명 Attitude_avg 고도의 평균 Attitude_var 고도의 분산 Attitude_skewness 고도의 사행도 Attitude_kurtosis 고도의 첨예도
maxZRate 전체 포인트중에 최대 고도를
갖는 포인트의 비율
minZRate 전체 포인트중에 최소 고도를
갖는 포인트의 비율 NorthGradient 북사면 기울기 WestGradient 서사면 기울기 EastGradient 동사면 기울기 SouthGradient 남사면 기울기 difference_each_retur
n
1차 반환 고도값 평균과 2,3,4차 반환 고도 평균의 차이 slope_EW 동서 양쪽 가장자리 부근 평균
고도의 차이
slope_NS 남북 양쪽 가장자리 부근 평균 고도의 차이
표 2. 고도관련 특징 정보
반사값 관련 특징 설명
Intensity_avg 반사값의 평균 Intensity_var 반사값의 분산 Intensity_skewness 반사값의 사행도 Intensity_kurtosis 반사값의 첨예도 Inten_max 반사값의 최대 값 Inten_min 반사값의 최소 값
diff_Inten_maxmin 반사값의 최대 값과 최소 값의 차 diff_Inten_maxavg 반사값의 최대 값과 평균의 차 diff_Inten_avgmin 반사값의 평균과 최소 값의 차 Separated_inten_rate 2,3,4차 반환값의 개수/ 1차 반
환값의 개수 비율 Separated_Inten_avg1 1차 반환 반사값의 평균 Separated_Inten_avg2 2차 반환 반사값의 평균 Separated_Inten_avg3 3차 반환 반사값의 평균 Separated_Inten_avg4 4차 반환 반사값의 평균 nonZeroReturn 반사값이 0이 아닌 포인트의 개수
표 3. 반사값 관련 특징정보
기타 특징 설명
Inten_Z 반사값의 평균 / 고도의 평균 area_density 타일내 3×3 구역에서 밀도의 최대
최소 비
entropy_Zall 타일내 고도의 엔트로피 entropy_Iall 타일내 반사값의 엔트로피
표 4. 기타 특징정보 우가 단일 지형이라면 현재 윈도우 지역의 지형은
분석된 단일 지형의 유형으로 결정하고 만일 복합 지형이라면 라인 번호 16∼23의 처리 불럭을 실행 한다. 이 처리 불럭은 현재 윈도우가 복합 지형으로 구성된 큰 지역을 처리하는 부분으로서 현재 윈도 우를 4개로 분할하여 각 서브 윈도우에 대해 재귀 적으로 지형 분류 알고리즘을 호출하게 된다.
3.3 지형의 클래스 결정을 위한 분류모델
동적 가변 윈도우 기반 지형 분류 기법의 재귀적 지형분류 알고리즘에서는 현재 윈도우의 지형 클래 스를 결정하기 위해서 윈도우 내에 포함되어있는 점 데이터들을 이용하여 분별력이 있다고 판단되는 특징들을 계산하고 데이터마이닝 기법을 이용하여 생성한 지형 분류 모델을 이용하여 단순 지형 또는 복합 지형 중의 하나로 클래스를 결정한다. 이 때 계산되는 특징들은 [1, 4, 11]에서 사용한 특징정보 중에 분별력이 있다고 판단되는 특징 정보와 본 연 구에서 추가시킨 다른 특징 정보까지 포함하여 총 32개를 후보 특징 정보로 정의하여 사용한다. 32개 의 특징들은 표 2와 같이 고도와 관련된 특징 13개 와 표 3과 같이 반사값에 관련된 특징 15개와 표 4 와 같이 기타 특징 4개로 구성되었다.
이렇게 정의한 특징정보 32개를 이용하여 데이터 마이닝의 대표적인 분류기법 중 하나인 규칙 집합 (rule set)을 이용하여 지형의 클래스를 숲, 초원, 도 로, 건물, 수역으로만 이루어진 5개의 단일 유형과 건물+초원, 건물+도로, 건물+숲, 숲+초원, 숲+도로, 숲+수역, 초원+수역, 도로+초원, 도로+수역으로 이 루어진 9개의 복합 유형으로 총 14개의 유형으로 결정하는 분류모델을 생성하였다.
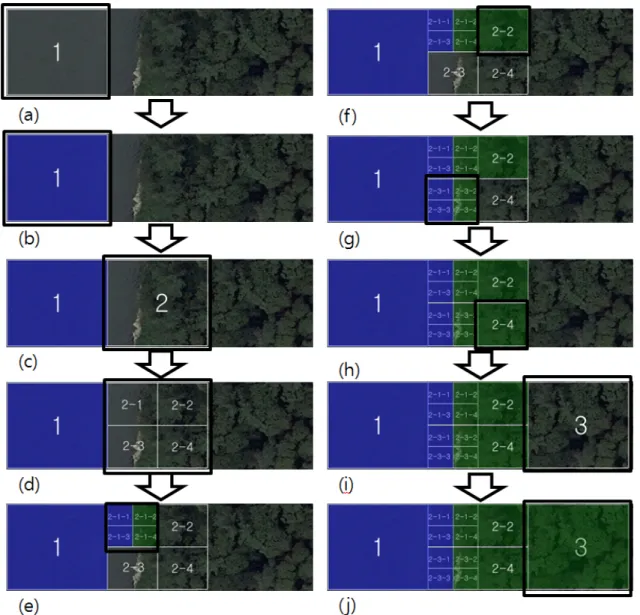
3.4 동적 가변 윈도우 기반 지형 분류 기법의 적용 본 논문에서 제안한 동적 가변 윈도우 기반 지형 분류 기법에 대한 이해를 돕기 위해 지형을 분류하 는 과정에 제안한 기법을 적용한 경우를 설명하면 그림 3과 같이 도식할 수 있다.
먼저, 지형 분류를 해야 하는 지역의 좌측 상단에
서부터 오른쪽 방향으로 최대 윈도우 크기로 지형
분류를 시도한다. 그림 3-(a)의 1번 영역과 같이 최
그림 3. 동적 가변 윈도우 기반 지형 분류 기법의 적용 예 대 윈도우로 재귀적 지형 분류 알고리즘이 호출되
면 현재의 최대 윈도우에 대한 지형 분류를 실시한 다. 1번 윈도우의 경우는 전체가 수역으로 이루어진 단일 지형이기 때문에 바로 특징 값을 계산하고 그 림 3-(b)와 같이 수역으로 지형을 분류한다. 따라서 1번 윈도우 전체가 지형의 유형을 결정한 판정 윈 도우가 된다. 즉, 한 번의 지형 분류 시도로 최대 윈도우 전체에 대한 지형을 결정할 수 있음을 의미 한다.
다음으로, 1번 윈도우의 오른쪽에서 다음의 최대 윈도우 크기의 영역을 설정한다. 그림 3-(c)의 2번 윈도우를 대상으로 역시 재귀적 지형분류 알고리즘
을 적용한다. 2번 윈도우는 숲과 수역의 복합 지형
(숲+수역으로 표현)이기 때문에 중심점을 기준으로
그림 3-(d)와 같이 2-1번 윈도우부터 2-4번 윈도우
까지 4개의 서브 윈도우로 분할하고 각각 재귀적
지형분류 알고리즘을 다시 호출한다. 따라서 먼저
2-1번 윈도우 영역의 지형을 분류한다. 2-1번 윈도
우 역시 숲+수역으로 이루어진 복합 지형이기 때문
에 다시 중심점을 기준으로 그림 3-(e)와 같이
2-1-1번 윈도우부터 2-1-4번 윈도우까지 4개의 윈
도우로 분할하고 다시 각각 재귀적 지형분류 알고
리즘을 적용한다. 2-1-1번부터 2-1-4번 윈도우는
모두 단일 지형으로 구성되었기 때문에 분류를 완
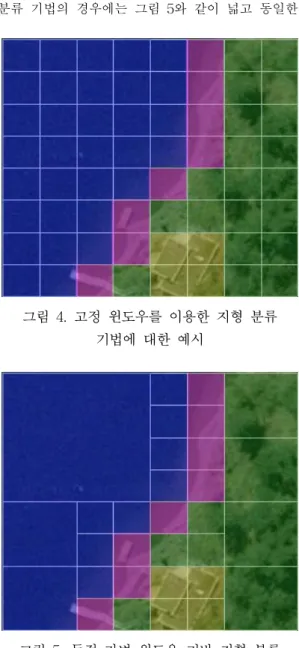
그림 4. 고정 윈도우를 이용한 지형 분류 기법에 대한 예시
그림 5. 동적 가변 윈도우 기반 지형 분류 기법에 대한 예시
료하고 2-1번에 대한 재귀적 지형분류 알고리즘을 빠져 나온다. 이 경우에 판정 윈도우는 4개로 2- 1-1번부터 2-1-4번이 된다.
다음으로 순차적으로 2-2번 윈도우의 영역을 분 류한다. 2-2번 윈도우는 단일 지형으로 구성된 경 우이므로 전체가 하나의 판정 윈도우가 된다. 다음 에는 2-3번 윈도우의 영역에 대한 지형 분류를 시 도한다. 그러나 2-3번 윈도우 역시 2-1번과 마찬가 지로 복합 지형으로 구성되었기 때문에 중심점을 기준으로 그림 3-(g)와 같이 2-3-1번 윈도우부터 2-3-4번 윈도우까지 4개의 윈도우로 분할하고 각각 재귀적 지형분류 알고리즘을 호출하여 지형 분류를 시도한다. 나누어진 2-3-1번 윈도우부터 2-3-4번 윈도우 모두 단일 지형이므로 각각의 지형의 유형 을 분류하고 2-3번에 대한 재귀적 지형분류 알고리 즘을 빠져나온다. 2-3번 윈도우에 대해서는 4개의 판정 윈도우가 사용되었다.
다음으로 그림 3-(h)의 2-4번 윈도우의 영역에 대해서 지형 분류를 한다. 2-4번 윈도우는 2-2번 윈도우와 마찬가지로 숲으로만 이루어진 단일 지형 이기 때문에 지형 분류를 완료한다. 이렇게 2-4번 까지 지형분류가 완료되면 최대 윈도우인 2번 윈도 우에 대한 모든 영역의 지형 분류가 완료되었으므 로 2번 윈도우에 대한 재귀적 지형분류 알고리즘을 종료한다. 1번 윈도우와는 달리 2번 윈도우가 여러 지형으로 구성되었기 때문에 2번 윈도우에 대해서 는 10개의 판정 윈도우를 사용하여 지형 분류를 완 료하였다.
다음으로 2번 윈도우의 오른쪽에서 최대 윈도우 크기의 영역을 설정한다. 그림 3-(i)와 같이 3번 윈 도우 영역을 설정하고 재귀적 지형분류 알고리즘을 수행한다. 3번 윈도우는 전체가 숲으로 이루어진 단 일 지형이기 때문에 그림 3-(j)와 같이 숲으로 지형 분류를 완료하고 재귀적 지형분류 알고리즘을 종료 한다. 이와 같은 방법으로 지형의 크기 및 반복 패 턴에 따라 분류에 사용하는 판정 윈도우의 크기를 가변적으로 변화시켜 전체 지형을 분류하는 것이 동적 가변 윈도우 기반 지형 분류 기법이다.
3.5 고정 윈도우 기반 지형 분류 기법과의 비교 임의의 지형에 대해서 고정 윈도우 기반 지형 분 류 기법을 이용하여 지형의 유형을 분류하는 경우 와 본 논문에서 제안한 동적 가변 윈도우 기반 지
형 분류 기법을 이용하여 지형의 유형을 분류한 결 과의 예는 각각 그림 4와 그림 5와 같다.
동일한 고정된 크기의 윈도우를 판정 윈도우로 이용하여 지형을 분류하는 고정 윈도우 기반 지형 분류를 이용하는 경우에는 그림 4와 같이 넓고 동 일한 유형의 지형을 분류하는 경우에도 각각의 미 리 정해진 작은 윈도우 크기로 분류를 하게 되기 때문에 지형의 크기 및 반복 패턴에 관계없이 동일 한 횟수와 동일한 시간이 소요된다.
그러나 분류에 사용하는 판정 윈도우 단위를 가
변적으로 변화시키는 동적 가변 윈도우 기반 지형
분류 기법의 경우에는 그림 5와 같이 넓고 동일한
항목 제원
지역 전라남도 장성지역
일시 2008년 11월
레이저 측정장비 ALTM Gemini 167
기준면표고 200m
비행고도 2,100m
대지고도 1,900m
대지속도 241km/h
레이저 주사율 125,000Hz
주사각 ±18도
주사폭 960m
스캔주기 40Hz
반사파 수 4EA
코스방향 점간격 0.46m
코스직각방향 점간격 0.53m
평균점밀도 5.5pts/m2
표 5. 항공 라이다 데이터 제원
항목 제원
CPU 펜티엄 4 3.0GHz
RAM 2.0GB
OS Windows XP
학습 데이터(단위 윈도우) 60,365개 실험 데이터(단위 윈도우) 368,640개
표 6. 실험에 사용한 컴퓨터 및 실험데이터 제원 유형의 단일 지형에 대해서는 큰 판정 윈도우로 지
형의 유형을 분류한다. 또한 서로 다른 영역으로 섞 인 복합 지형에 대해서는 작은 윈도우 크기를 적용 하여 지형의 유형을 분류한다. 그렇기 때문에 고정 윈도우 기반 지형 분류 기법과 비교하였을 때 사용 되는 판정 윈도우의 수가 적고 샘플링을 통하여 계 산에 사용되는 윈도우 내의 점 데이터 역시 줄어들 기 때문에 분류에 소요되는 시간을 줄일 수 있다.
고정 윈도우 기반 지형 분류 기법을 이용하여 지형 분류를 실시한 그림 4의 경우에는 64개의 판정 윈 도우를 사용해야 해당 지역의 지형 분류를 실시할 수 있다. 그러나 본 논문에서 제안한 동적 가변 윈 도우 기반 지형 분류 기법을 이용하여 지형 분류를 실시한 경우에는 10개의 분할된 윈도우와 31개의 판정 윈도우로 총 41개의 윈도우로 지형 분류를 완 성할 수 있음을 볼 수 있다. 이러한 예를 통하여 제 안된 동적 가변 윈도우 기반 지형 분류 기법을 이 용하는 경우가 기존의 고정 윈도우를 이용하여 지 형 분류를 실시하는 경우보다 적은 수의 윈도우를 계산하므로 효율적으로 지형 분류를 실시하는 것을 알 수 있다.
4. 성능 평가 및 분석
본 절에서는 동적 가변 윈도우 기반 지형 분류 기법의 효과를 분석하기 위하여 전라남도 장성 지 역의 항공 라이다 데이터를 이용하여 고정 윈도우 기반 지형 분류 기법과 지형 분류에 소요되는 시간 및 정확도를 비교하였다. 즉, 동적 가변 윈도우 기 반 지형 분류 기법의 최대 판정 윈도우 크기 별로 지형 분류에 필요한 소요시간과 정확도를 측정하여 시간 효율과 일치율을 계산하여 비교하였다.
본 논문에서는 표 5의 항공 라이다 데이터 중에 서 수목, 도로, 초지, 건물 등 다양한 지형으로 복잡 하게 구성되어 있는 0.2 ㎢ 넓이의 15개의 복잡 지 역 3 ㎢와 숲이나 초지, 숲이나 도로만으로 단순하 게 구성되어 있는 0.2 ㎢ 넓이의 15개의 단순 지역 3 ㎢으로 총 6 ㎢을 선정하여 사용하였다. 선정된 30 개의 지역은 5m × 5m의 고정 윈도우로 분류할 때 와 각각 최대 판정 윈도우 크기가 단위 윈도우 크 기 대비 한 변의 길이가 2, 4, 8, 16, 32배 인 5가지 경우에 대해 표 6의 시스템을 이용하여 실험하였다.
60,365개의 단위 윈도우 크기의 학습 데이터를 이용
하여 데이터마이닝 도구인 WEKA를 사용하여 지 형 분류모델을 생성하였다. 이 때, 지형의 클래스는 숲, 초원, 도로, 건물, 수역으로만 이루어진 5개의 단일 지형과 건물+초원, 건물+도로, 건물+숲, 숲+초 원, 숲+도로, 숲+수역, 초원+수역, 도로+초원, 도로+
수역으로 이루어진 9개의 복합 지형으로 총 14개의 유형으로 구분하였다. 이렇게 생성된 분류 모델을 이용하여 총 368,640개의 단위 윈도우로 구성되어있 는 30개의 지역에 대해서 소요시간과 정확도를 실 험하였다.
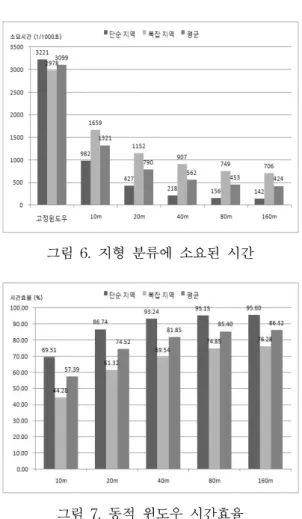
장성지역의 6 ㎢에 해당하는 30개의 지역을 각 기 법별로 분류한 후에 0.2 ㎢의 한 개의 지역을 분류 할 때 소요되는 평균 시간을 그림 6과 같이 구할 수 있다.
그림 6을 보면 고정 윈도우 기반 지형 분류 기법
을 이용하면 0.2 ㎢의 지역을 분류할 때 평균적으로
3,099ms가 소요되는 것을 알 수 있다. 반면에 동적
가변 윈도우 기반 지형 분류 기법은 최대 윈도우
그림 7. 동적 윈도우 시간효율 그림 6. 지형 분류에 소요된 시간
시간효율 고정 윈도우 소요시간
고정 윈도우 소요시간 동적 윈도우 소요시간
× (식 1)
분류효율
고정 윈도우 합계
고정 윈도우 합계 동적 윈도우 합계
× (식 2)
분류일치율 총 단위 윈도우 개수 분류일치된 단위 윈도우 개수
× (식 3)
고정
윈도우 10m 20m 40m 80m 160m 판정 윈도우
개수 12,288 4,934 2,660 1,772 1,378 1,266 분할된 윈도우
개수 0 636 640 534 452 427
합계 12,288 5,570 3,300 2,306 1,830 1,693
표 7. 분류에 소요된 윈도우 개수
한 변의 길이가 10m일 때 평균적으로 1,321ms가 소요되며 최대 윈도우의 크기가 커짐에 따라 424ms까지 소요시간이 줄어드는 것을 알 수 있다.
이를 통해 동적 가변 윈도우 기반 지형 분류 기법 을 이용 하면 고정 윈도우 기반 지형 분류 기법을 이용하는 기법보다 빠르게 지형 분류를 완료하는 것을 알 수 있으며 동적 윈도우의 최대 윈도우가 커질수록 지형 분류 속도는 더욱 빨라지는 것을 알 수 있다. 그림 7은 고정 윈도우 기반 지형 분류 기 법 사용하는 경우 대비 동적 가변 윈도우 기반 지 형 분류 기법을 사용하는 경우의 성능을 파악하기 위하여 그림 6의 결과를 이용하여 시간 효율을 분
석한 결과이다. 시간 효율은 고정 윈도우 기법으로 지형 분류를 할 경우의 소요시간(‘고정윈도우 소요 시간’으로 표현)과 동적 가변 윈도우 기반 지형 분 류 기법으로 지형 분류를 할 경우의 소요시간(‘동적 윈도우 소요시간’)을 이용하여 (식 1)과 같이 정의 하였다.
시간 효율 역시 동적 가변 윈도우 기반 지형 분류 기법의 최대 윈도우 크기가 커질수록 좋아짐을 알 수 있다. 이와 같은 결과의 원인은 표 7의 분류에 소요된 윈도우 개수의 차이를 분석하면 알 수 있다.
표 7을 보면 0.2 ㎢넓이의 지역에 대해서 지형 분 류를 할 때 고정 윈도우 기반 지형 분류 기법은 12,288개의 윈도우가 소요되는 것을 알 수 있다. 반 면에 동적 가변 윈도우 기반 지형 분류 기법은 최 대 윈도우 한 변의 길이가 10m일 때 총 5,570개의 윈도우가 소요되며 최대 윈도우의 크기가 커짐에 따라 총 1,693개까지 소요된 윈도우 개수가 줄어드 는 것을 알 수 있다. 이를 통해, 동적 가변 윈도우 기반 지형 분류 기법을 사용하는 경우가 고정 윈도 우 기반 지형 분류 기법을 사용하는 경우보다 더 적은 수의 윈도우를 연산하는 것을 알 수 있다. 분 류에 소요된 윈도우 개수와 소요 시간과의 관계를 분석하기 위하여 (식 2)와 같이 분류효율을 정의하 였다.
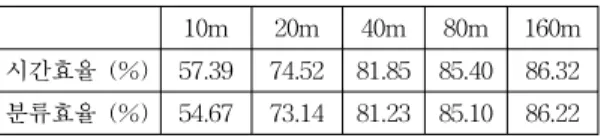
(식 1)에서 정의한 시간효율과 (식 2)에서 정의한
분류효율을 보면 표 8과 같이 유사한 값이 나오는
것을 확인 할 수 있다. 따라서 지형 분류에 소요된
윈도우 숫자가 분류 시간을 결정하는 것으로 분석
그림 8. 분류 일치율 분석 그림 9. 실제 지형 분류의 예
10m 20m 40m 80m 160m시간효율 (%) 57.39 74.52 81.85 85.40 86.32 분류효율 (%) 54.67 73.14 81.23 85.10 86.22
표 8. 동적 윈도우 시간 효율과 분류효율
할 수 있다.
동적 가변 윈도우 기반 지형 분류 기법을 사용하 여 빠르게 지형 분류를 실시한 결과가 고정 윈도우 기반 지형 분류의 결과와 어느 정도 일치하는지를 비교하기 위하여 고정 윈도우로 지형을 분류한 결 과와 동적 윈도우를 이용하여 분류한 결과가 같은 단위 윈도우의 개수(‘분류일치된 단위 윈도우 개수’) 를 이용하여 (식 3)와 같이 분류 일치율을 정의하였 다.
그림 8을 보면 동적 가변 윈도우 기반 지형 분류 기법을 사용하여 지형의 유형을 분류 하였을 때 동 적 윈도우의 최대 윈도우 한 변의 길이가 10m일 때 90.18%로 가장 높은 일치율을 가지는 것을 알 수 있다. 또한, 최대 윈도우 크기가 커질수록 80.45%까 지 일치율이 낮아지는 것을 알 수 있다.
본 논문에서 제안한 동적 가변 윈도우 기반 지형 분류 기법을 사용한 실제 지형 분류의 예를 보면 그림 9와 같다.
그림 9의 (a)는 앞에서 선정한 30개의 지역 중의 하나에 대한 항공 이미지이다. 이 지역에 대한 항공 라이다 데이터를 고정 윈도우로 분류하면 그림 9의 (c)와 같다. 또한 본 논문에서 제안한 동적 가변 윈 도우 기반 지형 분류 기법을 이용하여 최대 윈도우 의 크기를 10m, 20m, 40m로 정하여 지형 분류를 한 결과가 각각 그림 9의 (d), (e), (f)와 같다. 그림 9
의 (a)를 보면 왼쪽 위에 있는 흰색 원인 숲 지형이 그림 9의 (d)에서는 복합지형으로 오분류된 것을 알 수 있으며 그림 9의 (e)에서는 정확하게 숲으로 분류된 것을 알 수 있다. 이는 그림 9의 (d)는 (e)보 다 지형 분류에 상대적으로 작은 윈도우를 이용하 여 노이즈 데이터가 지형 분류에 미치는 영향이 크 기 때문에 정확한 분류가 되지 않는 것으로 분석 할 수 있다.
또한, 그림 9의 (a)를 보면 흰색 다이아몬드 모양
인 초지 부분이 그림 9의 (e)에서는 초지로 제대로
분류되었으나, 그림 9의 (f)에서는 숲으로 오분류된
것을 알 수 있다. 이는 그림 9의 (e)보다 (f)가 상대
적으로 큰 윈도우를 이용하여 지형 분류를 하기 때
문에 복합 지형에 대한 정확한 분류가 이루어 지지
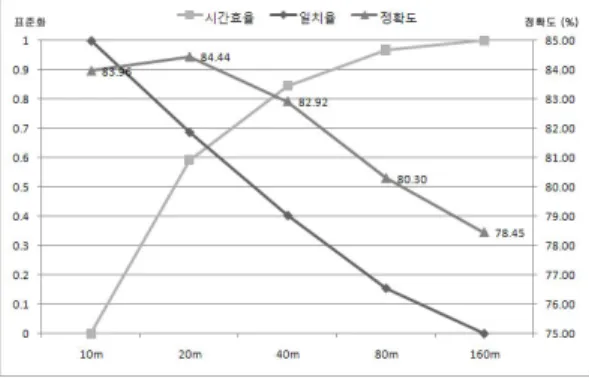
그림 10. 최적의 최대 윈도우 크기 않는 것으로 분석 할 수 있다. 이와 같은 분석은 그 림 10의 정확도를 확인하면 최대 윈도우의 한 변의 길이를 20m로 설정한 동적 가변 윈도우 기반 지형 분류 기법이 가장 높은 정확도를 가지는 것으로 타 당성을 입증 할 수 있다. 이와 같이 동적 가변 윈도 우 기반 지형 분류 기법은 최대 윈도우의 크기에 따라 노이즈 데이터에 대한 민감도와 복합 지형에 대한 민감도가 달라진다. 따라서 동적 가변 윈도우 기반 지형 분류기법의 정확도는 최대 윈도우의 크 기에 영향을 받는다. 본 논문에서는 동적 윈도우를 이용하여 지형 분류를 할 때 최적의 효과를 낼 수 있는 최대 윈도우의 크기를 분석하였다.
최적의 효과를 낼 수 있는 최대 윈도우 크기를 분석하기 위해 분류에 소요되는 시간과 일치율의 관계를 분석하였다. 이를 위해 앞에서 분석한 시간 효율과 일치율의 평균값들을 기준으로 0부터 1까지 의 값으로 평균화하였다.
그림 10을 보면 단위 윈도우 대비 한 변의 길이가 4배인 20m크기의 윈도우를 최대 윈도우로 정하여 동적 가변 윈도우 기반 지형 분류 기법을 이용하여 지형을 분류하는 것이 최적의 효율을 갖는 것으로 분석되었다. 이때 고정 윈도우 기반 지형 분류 기법 을 이용하는 경우와 비교하였을 때 74.52%의 시간 을 절약할 수 있고 87.14%의 일치율을 갖는 것을 알 수 있다. 또한 추가적으로 실험한 동적 가변 윈 도우 기반 지형 분류 기법의 정확도에서도 가장 좋 은 결과를 갖는 것을 알 수 있다. 정확도는 분류할 지형의 실제 이미지를 바탕으로 지형의 유형을 수 동으로 분류하고 동적 가변 윈도우 기반 지형 분류 기법을 이용하여 지형 분류를 실시한 결과와 비교 하여 구하였다. 즉, 정확도 측정은 39,549개의 단위 윈도우에 대해서 항공 영상을 보고 직접 지형 분류
한 데이터와 비교하였다. 그 결과 그림 10과 같이 단위 윈도우 한 변의 길이가 4배인 20m크기의 윈도 우를 최대 윈도우로 정하였을 때 가장 높은 정확도 를 보이는 것을 알 수 있었다.
5. 결 론
본 논문에서는 항공 라이다 데이터를 이용하여 윈도우 단위로 지형의 유형을 분류하는 방법으로 고정된 크기의 판정 윈도우를 사용하는 기존 기법 의 비효율성을 지적하고 이를 개선하기 위한 동적 가변 윈도우 기반 지형 분류 기법을 제안하였다. 기 존의 고정된 크기의 판정 윈도우를 사용하는 방법 은 지형의 크기 및 반복 패턴에 관계없이 고정된 크기의 윈도우 단위로 지형 분류를 판정하였기 때 문에 지형 분류에 많은 시간이 소요되는 문제점이 발생할 수 있다. 따라서 제안된 동적 가변 윈도우 기반 지형 분류 기법은 이러한 문제점들을 해결하 기 위하여 지형을 분류하기 위한 판정 윈도우의 크 기를 변화시킬 수 있도록 함으로써 분류에 소요되 는 윈도우의 개수를 줄여 분류 시간을 줄였다. 또한 현재 윈도우 크기에 관계없이 단위 윈도우의 평균 라이다 점 개수만큼 현재 윈도우에서 라이다 포인 트를 랜덤하게 샘플링하여 분류에 이용하여 소요되 는 시간을 줄였다.
본 논문에서는 제안한 동적 가변 윈도우 기반 지 형 분류 기법의 시간 효율 증진 효과와 정확도를 분석하기 위하여 전라남도 장성 지역의 항공 라이 다 데이터를 사용하여 고정된 크기의 윈도우로 지 형을 분류한 결과와 비교하여 실험하였다. 시간효율 은 고정 윈도우로 분류했을 때를 기준으로 각각의 동적 윈도우로 분류했을 때의 시간을 측정하여 시 간효율을 계산하였고, 분류 일치율은 고정된 크기의 윈도우로 분류 했을 때의 결과를 기준으로 각각의 동적 윈도우 기법으로 분류했을 때의 결과와 비교 하여 계산하였다. 일치율은 고정 윈도우로 지형을 분류한 결과와 동적 윈도우를 이용하여 분류한 결 과가 같은 단위 윈도우 개수를 측정하여 계산하였 고, 정확도는 분류 할 지형의 항공 영상을 이용하여 직접 지형 분류한 데이터와 비교하여 계산하였다.
실험결과를 분석해 보면 고정 크기의 윈도우를 이
용했을 때 보다 빠르게 지형을 분류하는 것을 알
수 있었다. 이에 본 논문은 정확도를 크게 손상시키
지 않으면서 빠르게 지형을 분류 할 수 있는 최적 의 최대 판정 윈도우를 제시하였다. 최대 판정 윈도 우 크기가 단위 윈도우 대비 한 변의 길이가 4배일 때 74.52%의 시간을 절약하면서도 87.14%의 일치 율과 84.44%의 정확도를 가져 효율적인 분류가 가 능한 것으로 판명 되었다. 이와 같이 기존 항공 라 이다 데이터 분류 기법들에 비해 데이터 분류에 소 요되는 연산량을 줄이는 결과를 이용하여 산사태, 홍수 등과 같은 재해의 피해현황파악이나 실시간으 로 지형의 변화를 모니터링하는 시스템과 같이 빠 른 분류 속도를 필요로 하는 지형 분류시스템에 적 용 할 수 있을 것으로 기대된다.
향후 연구로는 추가적으로 특징들을 정의하여 분 류 모델의 정확도를 증진시킬 예정이다. 또한, 복합 윈도우로 분류된 경우에는 윈도우 내부의 다른 유 형의 지형들에 대해서 경계선 추출과 함께 인접 윈 도우들을 결합시켜 정확도를 증진시킬 예정이다.
참 고 문 헌
[ 1 ] A. Antonarakis, K. Richards, and J. Brasington, 2008, “Object-based Land Cover Classification Using Airborne LiDAR,” Remote Sensing of Environment, Elesevier, vol. 112, pp. 2988-2998.
[ 2 ] M. Bartels and H. Wei, 2006, “Segmentation of LiDAR Data Using Measures of Distribution,”
International Archives of Photogrammetry, Remote Sesing and Spatial Information Sciences, vol. XXX VI, no. 7, pp. 426-431.
[ 3 ] A. P. Charaniya, R. Manduchi, and S. K.
Manduchi, 2004, “Supervised parametric classi- fication of aerial LiDAR data,” Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp. 1-8.
[ 4 ] N. Chehata, L. Guo, and C. Mallet, 2009, “Airborne Lidar Feature Selection for Urban Classification Using Random Forests,” Laser scanning, IAPRS, vol. 38, pp. 207-212.
[ 5 ] S. Filin, 2002, “Surface Clustering From Airborne Laser Scanning Data,” Proceedings of the Photo- grammetric Computer Vision ISPRS Commission III, pp.119-124.
[ 6 ] A. Sampath, and S. Jie, 2006, “Clustering based
Planar Roof Extraction From LiDAR Data,”
American Society For Photogrammetry and Remote Sensing Annual Conference, pp. 1-6.
[ 7 ] I. H. Witten, E. Frank, L. E. Trigg, M. Hall, G.
Holmes and S., J., Cunningham, 1999, “Weka:
Practical machine learning tools and techniques with Java implementations,” Proc ICONIP/
ANZIIS/ANNES99 Future Directions for Inte- lligent Systems and Information Sciences, pp.
192-196.
[ 8 ] 서용철, 최윤수, 허민, 2009, 항공 레이저 측량 기초 와 응용, 대한측량협회.
[ 9 ] 신휴석, 박충기, 김연미, 황선영, 박기호, 2008, “국 토 공중모니터링 현황과 발전방향”, 한국GIS학회 지, 제16권 제2호, pp. 173-192.
[10] 이규성, 이창환, 2005, 항공 LiDAR를 이용한 산림 측정, 한국과학기술정보연구원.
[11] 이성규, 이호준, 성철웅, 박창후, 조우석, 김유성, 2010, “항공라이다 데이터로부터 데이터마이닝 도 구 WEKA를 이용한 지형 분류기 제작 지원 시스 템”, 한국측량학회지, 제28권 제1호, pp. 133-142.
[12] 이성규, 성철웅, 박창후, 이호준, 김유성, 2010, “항 공 라이다 데이터로부터 타일 단위의 샘플링을 이 용한 효율적인 지형 분류 기법”, 한국공간정보학회 추계학술대회, pp. 119-125.
[13] 이임평, 2006, “LiDAR 데이터로부터 지표점 추출 을 위한 피쳐 기반 방법”, 대한원격탐사학회지, 제 22권 제4호, pp. 265-274.
[14] 이재원, 허민, 문용현, 이석용, 2002, “국토모니터링 체계 구축방안”, 대한토목학회 학술발표회, pp.
2627-2770.
[15] 한동엽, 조영욱, 김용일, 유기윤, 2003, “LiDAR데이 터의 점밀도에 따른 지물의 3D 모델링”, 대한토목 학회논문집, 제23권 제5 D호, pp. 711-717.
[16] 한수희, 허준, 엥흐바타르, 2008, “병렬처리와 가상 격자를 이용한 대용량 항공 레이저 스캔 자료의 효 율적인 처리”, 한국공간정보시스템학회논문지, 제 10권 제4호, pp. 21-26.
논문접수:2010.09.07
수 정 일:1차 2010.12.01 2차 2010.12.13 심사완료:2010.12.14
성 철 웅
2009년 인하대학교 정보통신공학 공학사
2009년~현재 인하대학교 대학원 정보 공학 석사 과정
관심분야는 공간 데이터베이스, GIS, 데이터마이닝
이 성 규
2009년 인하대학교 정보통신공학 공학 사
2009년~현재 인하대학교 정보통신대 학원 정보공학 석사 과정
관심분야는 GIS, 소프트웨어 공학
박 창 후
2009년 인하대학교 정보통신공학 공학사
2009년~현재 인하대학교 정보통신대 학원 정보공학 석사 과정
관심분야는 데이터마이닝, GIS
이 호 준
2010년 인하대학교 정보통신공학 공 학사
2010년~현재 인하대학교 대학원 정보 공학 석사 과정
관심분야는 데이터마이닝, 소프트웨어 공학
김 유 성