Journal of Aerospace System Engineering
Vol.13, No.3, pp.1-8 (2019) http://dx.doi.org/10.20910/JASE.2019.13.3.1
1. 서 론
제어모멘트자이로(CMG)는 일반적인 위성용 구동기 로 사용되어 왔던 반작용 휠에 비해 고토크 발생이 가
전절권 분포형 권선을 통한
제어모멘트자이로 김블의 저속 안정성 개선 연구
이준용1,†· 이헌조1· 오화석1·송태성2·강정민2·송덕기2·서중보3
1
2LIG ( )
3
Improvement of Low Speed Stability of CMG Gimbal Using Full-pitch Distributed Winding
Jun-yong Lee1, , Hun-jo Lee1, Hwa-suk Oh1, Tae-Seong Song2, Jeong-min Kang2, Deok-ki Song2 and Joong-bo Seo3
1Department of Aerospace and Mechanical Engineering, Korea Aerospace University
2LIGNEX1 Co. Ltd, Pangyo
3Defense Industry Technology Center, Agency for Defense Development
Abstract
The electromagnetic forces generate a torque on the gimbal motor, and changes in the coil current causes torque ripple. This affects the gimbals’ speed and results to unstable satellite attitude. It is therefore essential to reduce the torque ripple of the gimble motor with the aim of improving the attitude control accuracy of the satellite. This paper theoretically analyzes the torque generated from the modeling of a motor for general concentrated winding and distributed winding. The prototype was designed and fabricated through selection of the winding that reduces the torque ripple through simulation results. The results of the magnetic fields’
theoretical analysis and the back electromotive force of the prototype were compared with the calibrated results for verification of conformity and manufacture of the design. The low-speed test proved that the torque ripple is reduced by improving the speed stability.
초 록
전자기적 힘에 의해 김블 모터에 토크가 발생하며 코일 전류 변화는 토크 리플을 야기한다. 이는 김블 속도에 영향을 주는 동시에 위성의 자세를 불안정하게 한다. 따라서 위성의 자세 제어 정확도 향상을 위해서는 김블 모터의 토크 리플 저감이 필수적이다. 본 논문에서는 일반적인 집중형 권선과 분포형 권 선에 대해 모터의 모델링으로부터 발생 토크를 이론적으로 시뮬레이션 분석하였다. 토크 리플을 저감하 는 권선을 선정하여 시제품을 설계 및 제작하여 자기장 및 역기전력의 이론적 해석 결과와 측정 결과 를 비교하여 설계와 제작의 합치성을 확인하였다. 저속 시험을 통해 전절권 분포형 권선의 속도 안정도 가 향상되어 토크 리플이 저감됨을 입증하였다.
Key Words : CMG(제어모멘트자이로), Gimbal(김블), Coreless BLDC(코어리스 브러시리스 직류), Torque Ripple(토 크 리플), Distributed Winding(분포형 권선), Short Pitch Winding(단절권), Full Pitch Winding(전절권)
Received: Oct. 16, 2018 Revised: Jun. 03, 2019 Accepted: Jun. 03, 2019
† Corresponding Author
Tel: +82-10-2732-2032, E-mail: [email protected]
Ⓒ The Society for Aerospace System Engineering
능하기 때문에 고기동을 위한 구동기로서 주목받고 있 다. CMG는 고속 회전체의 각운동량을 김블이라는 구 조물로 회전시켜 자이로스코픽 토크를 발생시키는 장 치이다[1]. CMG의 토크는 김블의 각속도에 비례하여 발생하고 위성의 자세 안정성 측면에서 김블의 정속 유지가 가능한 최소 각속도와 속도 안정도가 중요하 다. 이를 만족하기 위해 김블 모터로는 전력대비 토크 효율이 좋은 코어리스 BLDC(coreless brushless direct current) 형태가 권장된다[2]. 그럼에도 김블이 저속으로 운용되는 과정에서 자기장과 상전류 변화에 따른 토크 리플이 발생하므로 이를 저감하기 위한 연 구가 필요하다[3].
국내에서는 상용 코어드 BLDC 모터에 대한 전류제 어 알고리즘 연구[4,5]와 코어리스 BLDC 모터의 설 계 및 이론적 특성 연구가 이루어졌고[7,8] 최근에 들 어 김블용 모터에 대한 제어 연구가 이루어지고 있다 [9,10]. 국외의 경우 BLDC 모터 모델링 기반의 토크 리플 저감 연구[11-13], 코어리스 BLDC 모터에 대한 정밀 토크 제어연구[14,15], 토크 리플 저감을 위한 최적화 설계[16] 등이 있다. 나아가 우주용 적용을 위 한 BLDC 모터 최적화 설계[17], PMSM(permanent magnet synchronous motor)의 피치(pitch) 별 최적 화 형상연구[18] 등 토크 리플을 최소화하기 위한 연 구가 다양하게 수행되었다.
본 논문에서는 CMG의 김블 모터를 구성하는 요소 중 코일의 배치를 단절권 집중형에서 전절권 분포형으 로 변경할 경우 저속 안정성의 영향을 이론적으로 분 석하였다. 이를 바탕으로 실제 김블 모터의 코일 모듈 을 설계, 제작 및 저속 조건에서의 시험을 수행하여 분석결과를 입증하였다.
2. 모터 토크 발생 이론
모터에서 발생하는 힘은 자기장()내 도선( )에 전 류()가 흐를 때 받는 로렌츠 힘()이고 전류는 전하 ()의 변화량이므로 식 (1)처럼 표현할 수 있다[19].
× (1)
중심에서 만큼 떨어진 코일이 감은 수 일 때 작 용하는 힘 이 토크 로 작용하므로 모터에서 발생 하는 토크는 아래와 같으며 식 (2)에서 볼 수 있듯이 토크 리플은 상전류 입력형상과 해당 코일 전기각() 에서의 자기장 형상에 의해 결정된다.
(2)
또한 권선은 자속이 Rotor의 회전에 따라 역기전력 (back electromotive force)이 발생하게 되는데 이것 은 전자기 유도 법칙(Faraday's law)에 따른다. 식 (3) 과 같이 자속 의 시간적인 변화는 기전력 를 형 성한다는 것을 알 수 있다.
∙ (3)따라서 모터를 전기적인 등가회로로 나타낼 수 있고 이 회로의 전기적인 등가 방정식은 식 (4)와 같다. 따 라서 모터에 전압이 입력되면 코일의 인덕턴스와 저 항, 역기전력의 크기에 의해 전류가 결정된다.
(4)
: Coil Input Voltage : Coil Inductance : Coil Resistance : Back EMF of Motor
면적이 이고 중심에서 만큼 떨어진 코일이 자계 에서 일정한 속도로 움직이는 경우, 자기장은 면적당 자속 이므로 모터 전체의 역기전력은 식 (5)와 같다.
(5)
: Rotor Angular Speed
결과적으로 모터의 회전에 따라 각 상에서의 역기전 력이 변화하므로 일정한 입력 전압에서 상전류가 변화
능하기 때문에 고기동을 위한 구동기로서 주목받고 있 다. CMG는 고속 회전체의 각운동량을 김블이라는 구 조물로 회전시켜 자이로스코픽 토크를 발생시키는 장 치이다[1]. CMG의 토크는 김블의 각속도에 비례하여 발생하고 위성의 자세 안정성 측면에서 김블의 정속 유지가 가능한 최소 각속도와 속도 안정도가 중요하 다. 이를 만족하기 위해 김블 모터로는 전력대비 토크 효율이 좋은 코어리스 BLDC(coreless brushless direct current) 형태가 권장된다[2]. 그럼에도 김블이 저속으로 운용되는 과정에서 자기장과 상전류 변화에 따른 토크 리플이 발생하므로 이를 저감하기 위한 연 구가 필요하다[3].
국내에서는 상용 코어드 BLDC 모터에 대한 전류제 어 알고리즘 연구[4,5]와 코어리스 BLDC 모터의 설 계 및 이론적 특성 연구가 이루어졌고[7,8] 최근에 들 어 김블용 모터에 대한 제어 연구가 이루어지고 있다 [9,10]. 국외의 경우 BLDC 모터 모델링 기반의 토크 리플 저감 연구[11-13], 코어리스 BLDC 모터에 대한 정밀 토크 제어연구[14,15], 토크 리플 저감을 위한 최적화 설계[16] 등이 있다. 나아가 우주용 적용을 위 한 BLDC 모터 최적화 설계[17], PMSM(permanent magnet synchronous motor)의 피치(pitch) 별 최적 화 형상연구[18] 등 토크 리플을 최소화하기 위한 연 구가 다양하게 수행되었다.
본 논문에서는 CMG의 김블 모터를 구성하는 요소 중 코일의 배치를 단절권 집중형에서 전절권 분포형으 로 변경할 경우 저속 안정성의 영향을 이론적으로 분 석하였다. 이를 바탕으로 실제 김블 모터의 코일 모듈 을 설계, 제작 및 저속 조건에서의 시험을 수행하여 분석결과를 입증하였다.
2. 모터 토크 발생 이론
모터에서 발생하는 힘은 자기장()내 도선( )에 전 류()가 흐를 때 받는 로렌츠 힘()이고 전류는 전하 ()의 변화량이므로 식 (1)처럼 표현할 수 있다[19].
× (1)
중심에서 만큼 떨어진 코일이 감은 수 일 때 작 용하는 힘 이 토크 로 작용하므로 모터에서 발생 하는 토크는 아래와 같으며 식 (2)에서 볼 수 있듯이 토크 리플은 상전류 입력형상과 해당 코일 전기각() 에서의 자기장 형상에 의해 결정된다.
(2)
또한 권선은 자속이 Rotor의 회전에 따라 역기전력 (back electromotive force)이 발생하게 되는데 이것 은 전자기 유도 법칙(Faraday's law)에 따른다. 식 (3) 과 같이 자속 의 시간적인 변화는 기전력 를 형 성한다는 것을 알 수 있다.
∙ (3)따라서 모터를 전기적인 등가회로로 나타낼 수 있고 이 회로의 전기적인 등가 방정식은 식 (4)와 같다. 따 라서 모터에 전압이 입력되면 코일의 인덕턴스와 저 항, 역기전력의 크기에 의해 전류가 결정된다.
(4)
: Coil Input Voltage : Coil Inductance : Coil Resistance : Back EMF of Motor
면적이 이고 중심에서 만큼 떨어진 코일이 자계 에서 일정한 속도로 움직이는 경우, 자기장은 면적당 자속 이므로 모터 전체의 역기전력은 식 (5)와 같다.
(5)
: Rotor Angular Speed
결과적으로 모터의 회전에 따라 각 상에서의 역기전 력이 변화하므로 일정한 입력 전압에서 상전류가 변화
하게 된다. 자기장은 사다리꼴 형상이 가장 일반적이 지만 설계에 따라 정현파 혹은 이빨 모양이 되기도 하 며 이러한 자기장의 형상과 상전류의 입력에 따라 토 크 리플이 발생한다[20]. 따라서 상전류의 입력 형상 설계를 통해 토크 리플의 저감이 가능하다.
3. 김블 설계 및 제작
3.1 코일 권선 설계
2극 3상의 BLDC 모터에서 극 사이에 코일을 동일 간격으로 배치하는 것이 구조 설계 시에 용이하기 때 문에 일반적으로 단절권 집중형 권선이 적용된다[21].
코일의 피치는 Fig. 1처럼 극 피치(pole pitch)에 대한 코일 스팬(coil span)를 의미하며 동일할 경우 전절권 (full pitch winding), 짧을 경우 단절권(short pitch winding)으로 정의한다. 전절권에 가까울수록 코일 간 격에 포함되는 자기장의 범위가 넓으므로 기자력이 높 다는 특성이 있다. 분포형 권선은 피치 조절이 가능하 기 때문에 적절한 설계를 통해 토크 리플을 저감할 수 있다. 본 연구에서는 일반적인 66% 단절권 집중형 권 선과 분포형 권선을 각각 33%, 66%, 전절권으로 나누 어 비교하였다.
Fig. 1 Full(left) and Short(right) Pitch Winding
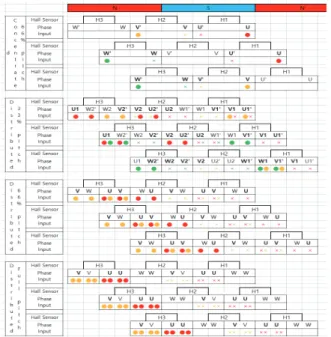
Fig. 2 66% Pitch Concentrated, 33%/66%/Full Pitch Distributed Coil Winding Concept
Fig. 3 3 Phase Signal with Winding Type
Figure 2는 이에 대한 개념도로 각 권선이 구조적으 로 배치되는 방법을 표현한다. 가장 위부터 극 간격의 66% 단절권 집중형, 33%, 66% 단절권 분포형, 전절 권 분포형임을 확인할 수 있다. 코어는 비금속 재질로 코어리스 BLDC 모터의 고정자로 설계하며 코어 앞면 에 배치된 코일이 실선, 뒷면에 배치된 코일이 점선으 로 표현되어 있다. 분포형의 경우 일정한 간격으로 분 포되며 집중형 코일 총 감은 수와 동일하게 설계하였 다. 따라서 전기각에 따라 자기장 변화에 의한 코일의 토크 발생 크기에 차이가 발생하므로 운용 시의 토크 리플을 분석하였다. 2극 3상 모터는 회전 방향에 따라 코일 별 홀 센서 출력 신호에 의해 적절한 U(빨강), V(노랑), W(초록) 상에 전류가 흐른다. Figure 3은 권 선별 U, V, W 상 전류의 신호에 대한 개념도이다. 분 포형 권선의 경우 복잡해 보이지만 기본적으로 집중형 권선에서의 전류 흐름과 동일하고 전기각에 따라 다른 자기장 영향을 받는 형태가 된다. 빨강, 노랑, 초록색 은 U, V, W상을 의미하고 ‘●’, ‘×’는 각각 전류가 평 면을 기준으로 나오는 방향과 들어가는 방향을 나타낸 다. 일반적으로 자기장은 굴곡진 사다리꼴 혹은 이빨 형상으로 나타나고 극의 끝부분에 위치할수록 감소된 자속밀도의 영향을 받게 된다. 따라서 직관적으로 코 일의 상전류 입력 시 극의 중앙부를 유지할수록 토크
리플이 감소한다. 분포형이 집중형에 비해 자속밀도가 연속적인 형태로 변화하므로 토크 리플 저감에 유리할 것으로 예측하였으며 토크의 크기 효율면으로는 전절 권이 단절권에 비해 좋을 것으로 예측하였다.
3.2 자기장에 따른 코일 유형 별 토크 분석 식 (2)를 통해 전기각에 따라 자기장이 변화함을 알 수 있으므로 권선 별 역기전력이나 발생 토크에 대한 시뮬레이션을 하기 위해서는 자기장 형상이 필요하다.
Figure 4는 본 연구를 위해 설계한 김블 3차원 모델 의 단면도이며 Fig. 5의 외륜 쪽 적색과 청색으로 표 시된 부분이 회전자의 영구자석, 회전자 안쪽의 주황 색이 코일 모듈을 의미한다.
Fig. 4 CMG Gimbal Designed Model
Fig. 5 Magnetic Analysis of Gimbal Rotor
Fig. 6 Average Flux Density of Analysis
본 연구에서 설계한 김블 회전자의 자기적 해석을 통해 Fig. 6과 같이 공극에서의 자속 밀도를 도출하였 으며 이는 코일의 높이 별 해석 결과를 평균한 수치이 다. 본 연구에서 설계한 회전자는 총 24극으로 2극이 30° 간격으로 배치하였다. 코일의 이동 속도가 일정하 다고 가정하고 전기각에 따른 자속 밀도와 코일의 배 치를 식 (5)에 적용하여 역기전력을 도출할 수 있다.
Figure 7은 각 권선 유형별로 상간 역기전력을 전기각 에 따라 분석한 결과이며 각속도에 따라 크기가 달라 지기 때문에 정규화(normalizing) 하였다. 집중형 권선 의 역기전력은 점 위치에서의 자기장과 비례하기 때문 에 자기장의 형상과 유사한 형태가 된다. 하지만 코일 이 정확히 1/3 피치가 아니고 배치 특성상 이보다 약 간 작기 때문에 이에 따른 추가 손실이 발생하여 자기 장 형상과 차이가 발생한다. 분포형 코일의 상간 연기 전력은 영구자석이 회전함에 따라 분포되어있는 개별 적 코일의 전기각에서 자속밀도를 적분하여 도출하였 다. 분포형 버전 1의 역기전력은 다른 권선에 비해 상 대적으로 작은 결과를 보인다.
Fig. 7 Back-EMF Analysis of Winding Types
리플이 감소한다. 분포형이 집중형에 비해 자속밀도가 연속적인 형태로 변화하므로 토크 리플 저감에 유리할 것으로 예측하였으며 토크의 크기 효율면으로는 전절 권이 단절권에 비해 좋을 것으로 예측하였다.
3.2 자기장에 따른 코일 유형 별 토크 분석 식 (2)를 통해 전기각에 따라 자기장이 변화함을 알 수 있으므로 권선 별 역기전력이나 발생 토크에 대한 시뮬레이션을 하기 위해서는 자기장 형상이 필요하다.
Figure 4는 본 연구를 위해 설계한 김블 3차원 모델 의 단면도이며 Fig. 5의 외륜 쪽 적색과 청색으로 표 시된 부분이 회전자의 영구자석, 회전자 안쪽의 주황 색이 코일 모듈을 의미한다.
Fig. 4 CMG Gimbal Designed Model
Fig. 5 Magnetic Analysis of Gimbal Rotor
Fig. 6 Average Flux Density of Analysis
본 연구에서 설계한 김블 회전자의 자기적 해석을 통해 Fig. 6과 같이 공극에서의 자속 밀도를 도출하였 으며 이는 코일의 높이 별 해석 결과를 평균한 수치이 다. 본 연구에서 설계한 회전자는 총 24극으로 2극이 30° 간격으로 배치하였다. 코일의 이동 속도가 일정하 다고 가정하고 전기각에 따른 자속 밀도와 코일의 배 치를 식 (5)에 적용하여 역기전력을 도출할 수 있다.
Figure 7은 각 권선 유형별로 상간 역기전력을 전기각 에 따라 분석한 결과이며 각속도에 따라 크기가 달라 지기 때문에 정규화(normalizing) 하였다. 집중형 권선 의 역기전력은 점 위치에서의 자기장과 비례하기 때문 에 자기장의 형상과 유사한 형태가 된다. 하지만 코일 이 정확히 1/3 피치가 아니고 배치 특성상 이보다 약 간 작기 때문에 이에 따른 추가 손실이 발생하여 자기 장 형상과 차이가 발생한다. 분포형 코일의 상간 연기 전력은 영구자석이 회전함에 따라 분포되어있는 개별 적 코일의 전기각에서 자속밀도를 적분하여 도출하였 다. 분포형 버전 1의 역기전력은 다른 권선에 비해 상 대적으로 작은 결과를 보인다.
Fig. 7 Back-EMF Analysis of Winding Types
분포형 버전 2는 집중형과 유사하지만 정확히 33%
피치로 설계가 가능하기 때문에 자기장 형상에 가까운 결과를 보이며 분포형 버전 3은 정현파와 유사한 형상 으로 도출된다. 일반적으로 역기전력의 형상이 토크 리플과 연관이 있기 때문에 자기장 형상과의 유사성을 검토할 필요가 있다. 하지만 식 (5)에서 각속도에 비례 하다는 것을 알 수 있고 김블의 경우 저속으로 운용되 기 때문에 저속 특성에는 그 영향이 크지 않을 것으로 예측된다. 본 연구에서는 코일의 배치 설계와 실제 제 작 결과의 유사성을 확인하여 검증하기 위한 이론적 근거로써 분석한다. Figure 8과 Table 1은 해석으로 도출된 자속밀도와 배치된 코일에서 전류 입력에 따른 발생 토크를 시뮬레이션 한 결과이다. 분포형 버전 1 은 토크 리플의 크기가 저감되지만 최대 토크 크기가 집중형 권선에 비해 낮아 효율이 떨어진다. 이는 Fig.
3에서 개념적으로도 토크 발생 효율이 낮을 것이 라는 예상과 부합한다. 분포형 버전 2는 집중형 권선과 비 교하여 발생 토크의 최대 크기가 유사하지만 전기각에 따라 토크 리플이 크게 발생하고 평균 토크 크기도 감 소한다. 전절권 분포형의 경우 발생 토크의 최대 크기 가 증가하면서 토크 리플은 저감되는 것을 확인 할 수 있다. 이를 통해 전절권 분포형 권선이 발생 토크와 속도 안정성 측면에서 유리함을 도출하였고 시제품으 로 제작하여 성능을 검증하였다.
Fig. 8 Generating Torque Analysis of Winding Types
Coil Winding Torque(mNm)[std]
66% Pitch Concentrated 10.677[0.623]
33% Pitch Distributed 6.066[0.235]
66% Pitch Distributed 10.624[0.484]
Full Pitch Distributed 12.245[0.475]
Table 1 Torque Comparison of Winding Type
3.3 시제품 제작 및 설계 검증
설계한 김블을 제작하여 Fig. 9와 같이 시제품을 완 성하였으며 내부에는 Fig. 10의 단절권 집중형과 전절 권 분포형 코일 모듈을 교체하여 시험할 수 있도록 구 성하였다. 코일 모듈은 지름 247 mm, 높이 30 mm로 총 36상이며 상 별로 각각 100 턴으로 제작되었다.
Fig. 9 Prototype of CMG Gimbal
Fig. 10 Concentrated(upper) Winding Coil and Distributed(lower) Winding Coil
Fig. 11 Flux Density Measurements & Analysis
Figure 10의 위 사진은 66% 피치 단절권 집중형 권선 코일을 제작한 것이며 아래 사진은 전절권 분포 형 코일을 제작한 모습이다. 김블 회전자의 자기장은 자력계(magnetometer)를 이용하여 높이 및 각도에 따 라 측정하였으며 높이에 따라 평균한 이론적 해석 결 과와 측정 결과를 Fig. 11에 나타내었고 유사함을 확 인할 수 있었다.
김블을 외부의 구동시스템을 이용하여 정속으로 회 전시키는 시험을 하고 이 때의 상간 역기전력을 측정 하였다. Figure 12, Fig. 13은 코일 권선 모듈 별 전 기각에 따른 역기전력의 측정 결과이다. 단절권 집중 형 코일 모듈은 역기전력 측정 결과 자기장 형상이 나 타나고 33% 피치보다 짧아 이에 의한 영향으로 이론 적 시뮬레이션 결과와 유사함을 확인할 수 있다. 전절 권 분포형 코일 모듈의 역기전력도 시뮬레이션 결과와 유사하게 정현파 형상으로 나타났으며 이를 통해 이론 적 모델링과 시뮬레이션의 적합성을 확인하였다.
Fig. 12 Back-emf Measurements & Analysis of Concentrated Winding
Fig. 13 Back-emf Measurements & Analysis of Distributed Winding
4. 김블 저속 안정성 시험 결과
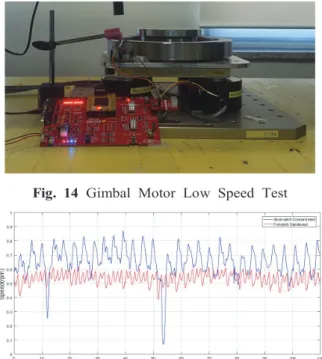
Figure 14는 김블 모터에 일정한 전압 입력으로 정 속 구동하기 위한 장치를 구성한 모습이며 Fig. 15는 단절권 집중형과 전절권 분포형 코일 모듈을 약 110 초간 저속 구동한 결과이다. 이를 김블의 각도에 따라 각속도로 정리해보면 Fig. 16과 같으며 동일한 각도에 서 유사하게 속도 불안정이 발생하는 현상을 확인할 수 있다.
Fig. 14 Gimbal Motor Low Speed Test
Fig. 15 Speed Fluctuation Measurements
Fig. 11 Flux Density Measurements & Analysis
Figure 10의 위 사진은 66% 피치 단절권 집중형 권선 코일을 제작한 것이며 아래 사진은 전절권 분포 형 코일을 제작한 모습이다. 김블 회전자의 자기장은 자력계(magnetometer)를 이용하여 높이 및 각도에 따 라 측정하였으며 높이에 따라 평균한 이론적 해석 결 과와 측정 결과를 Fig. 11에 나타내었고 유사함을 확 인할 수 있었다.
김블을 외부의 구동시스템을 이용하여 정속으로 회 전시키는 시험을 하고 이 때의 상간 역기전력을 측정 하였다. Figure 12, Fig. 13은 코일 권선 모듈 별 전 기각에 따른 역기전력의 측정 결과이다. 단절권 집중 형 코일 모듈은 역기전력 측정 결과 자기장 형상이 나 타나고 33% 피치보다 짧아 이에 의한 영향으로 이론 적 시뮬레이션 결과와 유사함을 확인할 수 있다. 전절 권 분포형 코일 모듈의 역기전력도 시뮬레이션 결과와 유사하게 정현파 형상으로 나타났으며 이를 통해 이론 적 모델링과 시뮬레이션의 적합성을 확인하였다.
Fig. 12 Back-emf Measurements & Analysis of Concentrated Winding
Fig. 13 Back-emf Measurements & Analysis of Distributed Winding
4. 김블 저속 안정성 시험 결과
Figure 14는 김블 모터에 일정한 전압 입력으로 정 속 구동하기 위한 장치를 구성한 모습이며 Fig. 15는 단절권 집중형과 전절권 분포형 코일 모듈을 약 110 초간 저속 구동한 결과이다. 이를 김블의 각도에 따라 각속도로 정리해보면 Fig. 16과 같으며 동일한 각도에 서 유사하게 속도 불안정이 발생하는 현상을 확인할 수 있다.
Fig. 14 Gimbal Motor Low Speed Test
Fig. 15 Speed Fluctuation Measurements
Fig. 16 Speed Fluctuation with Gimbal Angle
Fig. 17 FFT of Speed Fluctuation
Coil Winding Speed(rpm)[std]
66% Pitch Concentrated 0.668 [0.101]
Full-pitch Distributed 0.534 [0.040]
Table 2 Speed Stability Comparison of Winding Type
Table 2를 보면 전절권 분포형 코일이 단절권 집중 형보다 속도 표준편차가 39.8% 작음을 확인할 수 있 으므로 약 60%의 저감 효과가 있다. 한편 고속 푸리 에 변환(FFT; fast fourier transform)을 수행하여 각 시험별 외란 주파수가 각각 0.264 Hz, 0.645 Hz임을 얻었고 이는 각각 15.84 rpm, 38.7 rpm으로 각각의 구동 속도와 비교하면 단절권 집중형은 24/rev로 극 수와, 전절권 분포형은 72/rev로 상전류 변화 주파수 와 관련이 크다는 것을 확인할 수 있다. 이를 통해서 코일 권선 변경에 의해 토크 리플의 발생 요인 중 극 변화보다 높은 주파수인 상전류 변화 주파수에 의한 영향으로 변화된다는 것도 확인할 수 있었다. 결과적 으로 전절권 분포형 권선 방식을 적용하면 단절권 집 중형 권선 방식에 비해 저속 안정성이 향상되는 것을 시험 결과를 통해 확인하였고 이를 통해 토크 리플을 저감하였음을 검증하였다.
5. 결 론
김블의 속도 안정성을 향상시키기 위해 모터에서 발 생하는 토크 리플을 저감해야 한다. 코어리스 BLDC 모터의 토크 리플은 자기장 형상과 상전류 변화에 의 해 발생하므로 적절한 설계를 통해 이에 대한 개선이 가능하다. 본 논문에서는 모터의 모델링에 의한 기본 적인 토크 발생 원리를 통해 코일 권선 별로 토크 리 플을 분석하였다. 코일은 66% 단절권 집중형과 33%, 66% 단절권 분포형. 전절권 분포형으로 나누었고 각 각에 대하여 해석된 자속 밀도 결과를 적용하여 각 권 선별 역기전력과 발생토크를 시뮬레이션하였다. 이를 통해 토크 리플 저감을 검증할 모델로서 전절권 분포 형 권선을 선택하여 집중형 권선과 비교할 수 있도록 시제품을 설계 및 제작하였다. 자기장 형상과 코일 별 역기전력 형상 측정을 통해 이론적 분석과 비교하여 유사성을 확인하였다. 최종적으로 김블의 저속 운용 시험을 수행하여 단절권 집중형에 비해 전절권 분포형 권선 형식의 토크 리플이 약 60% 저감하는 결과를 도 출하여 저속 안정성을 개선함을 검증하였다. 본 연구 를 통해 정속구동 시 역기전력 및 발생토크 시뮬레이 션 기법을 획득하고 제어모멘트자이로 김블의 저속 기 술을 확보하여 향후 김블의 초저속 운용을 위한 연구 로 활용가능하다.
후 기
본 연구는 (주)LIG넥스원의 지원을 받은 과제 (2017-15-009) ‘저궤도 고기동 인공위성용 제어모멘 트 자이로 개발분석 연구’의 일환으로 수행되었습니다.
References
[1] M. J. Sidi, "Spacecraft Dynamic and Control,"
Cambridge University Press, 1997.
[2] G. Kang, J. Hong and Gyutak, "A Novel Design of an Air-Core Type Permanent Magnet Linear Brushless Motor by Space Harmonics Field Analysis,"
IEEE Transactions on Magnetics vol. 37, pp. 3732–
3736, 2001.
[3] J. Lee, “Gimbal Control Disturbance Modeling of Control Moment Gyro,” Master’s thesis, Korea Aerospace University, 2016.
[4] K. Kwon and S. Kim, "A Current control Strategy for Torque Ripple Reduction on Brushless DC Motor during Commutation.", Journal of Power Electrocis, 9(3), pp. 195-202, 2004.
[5] S. Park, T. Kim, B. Lee and D. Hyun, "A Current Control Algorithm for Torque Ripple Reduction of Four-Switch Three-Phase Brushless DC Motors,"
Journal of Power Electrocis, 9(2), pp. 126-133, 2004.
[6] J. Choi, S. Lee, K. Ko and S. Jang, "Improved Analytical Model for Electromagnetic Analysis of Axial Flux Machines With Double-Sided Permanent Magnet Rotor and Coreless Stator Windings," in IEEE Transactions on Magnetics, vol. 47, no. 10, pp.
2760-2763, Oct. 2011.
[7] J. Ahn, Y. Kim, Y. Kim and S. Jung, "Design and Characteristic Analysis of Coreless Axial Flux Permanent Magnet Synchronous Generator for Wind Turbine Systems," KIEE 44th Conference 2013, pp.
857-858. 2013
[8] K. Joo, S. Oh, S. Cho, H. Park, S. Won and J. Lee,
"3-Leg Inverter Control for 2-Phase Outer Rotor Coreless Motor in Multi-D.O.F system," KIEE 47th Conference 2016, pp. 646-647, 2016.
[9] J. Lee, and H. Oh. "Verification of Torque Disturbance Modeling of CMG Gimbal and Its Torque Ripple Reduction using Feed-Forward Control," Journal of Aerospace System Engineering, pp. 27-34, 2018.
[10] S. John and C. M. Ong. “Modeling of electromechanical and electromagnetic disturbances in DC motors,” Electromagnetic Compatibility, IEEE National Symposium on, 1989.
[11] Y. Mandel and G. Weiss, “Adaptive internal model based suppression of torque ripple in brushless DC motor derives,” Systems Science and Control
Engineering, vol.3, pp. 162-176, 2015.
[12] N. Lakshmipriya, S. Manivel, and N. Sadeesh.
“Modeling of SEPIC Fed PMBLDC motor for torque ripple minimization,” International Journal of Research and Engineering: 10, 2015.
[13] F. Fang, X. Zhou, and G. Liu, “Instantaneous torque control of small inductance brushless dc motor,”
IEEE Trans. Power Electron., vol. 27, no. 12, pp.
4952–4964, Dec. 2012.
[14] J. Fang, X. Zhou and G. Liu, "Precise Accelerated Torque Control for Small Inductance Brushless DC Motor," IEEE Transactions on Power Electronics, vol. 28, no. 3, pp. 1400-1412, March 2013.
[15] C. Hwang, P. Li, F. C. Chuang, C. Liu and K.
Huang, "Optimization for Reduction of Torque Ripple in an Axial Flux Permanent Magnet Machine," IEEE Transactions on Magnetics, vol. 45, no. 3, pp.
1760-1763, March 2009.
[16] R. P. Praveen et al., "Optimal design of a surface mounted permanent-magnet BLDC motor for spacecraft applications," 2011 International Conference on Emerging Trends in Electrical and Computer Technology, Nagercoil, 2011, pp. 413-419.
[17] Evangelos M. Tsampouris, Minos E. Beniakar and Antonios G. Kladas, "Geometry Optimization of PMSMs Comparing Full and Fractional Pitch Winding Configurations for Aerospace Actuation Applications," IEEE Transactions on Magnetics, vol.48, pp. 943–946, 2012.
[18] Boldea and S. A. Nasar, "Linear Motion Electromagnetic Systems". John Wiley and Sons, 1985.
[19] Duane C. Hanselman, "Brushless Permanent Magnet Motor Design," Magna Phtsics Publishing, 2003.
[20] Skaar, S.E., Krovel, O., Nilssen, R.: "Distribution, coil span and winding factors for PM machines with concentrated windings," ICEM-2006, paper 346, Sept 2006