학 술 논 문
74
장애인용 핸드컨트롤을 이용한 가속 및 제동 페달을 동작할 때의 상지 근육 EMG 분석 및 운전 성능 평가
송정헌·김용철
대구대학교 재활공학과
Analysis of Muscle Activities and Driving Performance for Manipulating Brake and Accelerator Pedal by using
Left and Right Hand Control Devices
Jeongheon Song and Yongchul Kim
Daegu University, Rehabilitation Science and Technology
(Manuscript received 6 December 2016; revised 2 April 2017; accepted 3 April 2017)
Abstract: The purpose of this study was to investigate the EMG characteristics of driver’s upper extremity and driv- ing performance for manipulating brake and accelerator pedal by using left and right hand control devices during sim- ulated driving. The people with disabilities in the lower limb have problems in operation of the motor vehicle because of functional loss for manipulating brake and accelerator pedal. Therefore, if hand control device is used for adaptive driving controls in people with lower limb impairments, the disabled people can improve their quality of life by driving a motor vehicle. Six subjects were participated in this study to evaluate driving performance and muscle activities for operating brake and accelerator pedal by using two different hand controls (steering column mounted hand control and floor mounted hand control) in driving simulator. We measured EMG activities of six muscles (posterior deltoid, middle deltoid, triceps, biceps, flexor carpi radialis, and extensor carpi radialis) during pushing and pulling movement with different hand controls for acceleration and braking. STISim Drive 3 software was used for the performance test of different hand control devices in straight lane course for time to reach target speed and brake reaction time.
While pulling the hand control lever toward the driver, normalized EMG activities of middle deltoid, triceps and flexor carpi radialis in subjects with disabilities were significantly increased (p < 0.05) compared to the normal subjects.
It was also found that muscle responses of posterior deltoid were significantly increased (p < 0.05) when using the right hand control than left hand control. While pushing the hand control lever forward away from the driver, nor- malized EMG activities of posterior deltoid, middle deltoid and extensor carpi radialis in subjects with disability were significantly increased (p < 0.05) compared to the normal subjects. It was shown that muscle responses of middle deltoid, biceps and extensor carpi radialis were significantly increased when using the right hand control than left hand control. Brake reaction time and time to reach target speed in subjects with disability was increased by 12%
and 11.3% on average compared to normal subjects. The subjects with physical disabilities showed a tendency to relatively slow acceleration at the straight lane course.
Key words: Hand controls, EMG, Driving Simulator
I. 서 론
이동의 자유와 관련하여 교통약자 이동편의 증진 법 제3 조에는 “장애인 등 교통약자는 인간으로서의 존엄과 가치 및 행복을 추구할 권리를 보장받기 위하여 장애인 등 교통 Corresponding Author : Yongchul Kim
Department of Rehabilitation Science and Technology, Daegu University, Daegudaero 201, Jilyang, Gyeongsan, Gyeongbuk, 38453, Korea
TEL: +82-53-850-4342 / E-mail: [email protected]
이 연구는 대구대학교 학술연구비지원 사업 과제의 지원을 받아 수행
하였음.
75 약자가 아닌 사람들이 이용하는 모든 교통수단, 여객시설 및
도로를 차별 없이 안전하고 편리하게 이용하여 이동할 수 있는 권리를 가진다”라고 명시되어 있다. 따라서, 교통약자 중에서 이동과 관련하여 신체적 또는 기능상의 제약이 있는 장애인 및 고령자의 경우 대중 교통을 이용하기 위한 접근 성 확보가 필요하며, 전세계적으로 대중교통의 접근 성 향 상을 위한 노력들이 어루어져 오고 있다[1].
하지만, 수동 휠체어나 전동 휠체어를 사용하는 장애인의 대부분은 대중교통 수단을 이용하기 위한 접근 성이 부족하 여 실제 장애인의 이용률이 매우 낮은 경우가 많다[2-3]. 대 부분의 유럽과 미국 등 선진국에서는 독립적인 이동이 가능 하도록 자가운전을 통한 이동권의 확보를 지원함으로써, 실 제 체감하는 장애인의 이동권의 자유를 최대한 보장할 수 있도록 추진하고 있다[4].
대중교통을 이용하기 어려운 지체 장애인의 경우 자가 운 전을 하기 위해서는 기존의 차량을 운전 할 수가 없기 때문 에, 손상된 신체 기능을 보완해 줄 수 있는 운전 보조장치 가 필요하다[5-12]. 특히, 수동 및 전동 휠체어를 사용하는 장애인의 경우 비장애인과 동등한 수준의 운전능력을 갖기 위해서는 한 손으로 조향휠을 조작하기 위한 선회보조장치 (Steering assistive device) 와, 다른 한 손으로 가속 및 제 동 페달을 조작할 수 있는 핸드컨트롤(Hand controls)을 필 요로 하게 된다[5,7,13].
핸드컨트롤의 개발과 관련하여 외국의 경우 최근까지 다 양한 종류의 핸들컨트롤이 개발되어 오고 있으며, 가장 대 표적인 것으로 차량의 조향 칼럼에 고정하여 운전자의 앞쪽 으로 밀면 제동이 되고, 운전자의 몸쪽 방향으로 당기면 가 속이 되는 칼럼 타입(column type)과 차량의 바닥 면에 고 정하여 동작하는 플로어 타입(floor type)의 2가지 종류가 있으며, 칼럼 타입의 경우 대부분 운전자의 좌측 방향에서 동작하기 때문에 좌측 핸드컨트롤이라고 하며, 플로어 타입 의 경우 운전자의 우측 방향에서 동작하기 때문에 우측핸드 컨트롤이라고 부른다. 칼럼 타입의 좌측 핸드컨트롤의 경우 Sure Grip, MPS, Drive Master 회사와, 플로어 타입의 우 측 핸드컨트롤의 경우 Nissin, Menox, Fugicon등이 대표 적인 핸드컨트롤 제작 업체이다.
핸드컨트롤과 관련된 연구동향을 살펴보면, 장애인이 핸 드컨트롤을 사용하기 위해서 핸드컨트롤을 조작하기 위한 동작 힘과 관련된 연구[6,14-15]와 핸드컨트롤의 사용자 안 전과 제품 품질에 대한 연구가[16-17] 이루어져 왔다. 또한 핸드컨트롤을 사용하는 운전자의 제동 반응 시간이나 가속 시간과 같은 운전 능력과 관련된 연구가 최근까지 이루어 지고 있다[18-21].
하지만 국내에서 수입 판매하는 제품의 경우 운전자의 신 체적인 특성이나 기기의 성능에 대한 고려 없이 판매가 이
루어지고 있으며, 외국의 경우 운전자의 좌측 및 우측 팔의 잔존 하는 근력이나 관절의 동작 범위를 평가하고, 운전자 가 안전하게 운전할 수 있는 최적의 핸드컨트롤을 적용하고, 이후 운전재활전문가[22-23]를 통하여 훈련을 하고 있기 때 문에 국내에서도 장애인의 안전한 운전과 관련하여 운전 보 조장치의 적용을 위한 객관적인 기준을 마련할 필요가 있다.
따라서, 본 연구에서는 운전시뮬레이터를 이용하여 국내 에서 가장 많이 수입 판매되고 있는 Sure Grip회사의 좌 측 핸드컨트롤과 Nissin회사의 우측 핸드컨트롤을 사용하 여 가속 및 제동 페달을 동작하는 경우에 대한 운전자의 특 성과 운전보조 기기의 성능을 분석하고자 하였다. 운전자의 신체적인 특성을 분석하기 위하여 장애인과 비장애인 6명을 대상으로 비교 실험을 수행하였으며, 좌측 및 우측 핸드컨 트롤의 동작과 관련된 6가지 근육의 근전도 신호를 측정함 으로써 기존에의 도수근력평가 방법을 이용해서 정성적으로 평가하는 것보다 개별적인 근육의 작용을 좀더 객관적이고 정량적인 방법으로 분석하고자 하였다. 그리고, 좌측 핸드 컨트롤 및 우측 핸드 컨트롤의 제동 성능과 가속 성능을 측 정하여 각각의 기기가 갖는 운전 성능을 분석하였다.
II. 연구 방법
1. Subjects
본 연구에서는 차량의 주행과 관련된 가속 과 감속을 손으 로 조작하기 위한 운전보조장치인 핸드컨트롤의 2가지 종류 ( 좌측 및 우측 핸드컨트롤)에 대한 운전자의 동작 특성 및 기 기 성능을 분석하기 위하여 비장애인 그룹 3명, 장애인 그룹 3 명으로 구성된 2개의 그룹으로 나누어 실험을 진행하였다.
2 개의 그룹 모두 운전면허가 있으며, 면허를 취득 한지 1 년 이상 2년 미만의 초보 운전자를 실험 대상자로 선정하였 다. 운전면허를 취득하더라도 개인 간의 운전 능력에는 차 이가 존재할 수 있으므로, 운전시뮬레이터에서 운전능력테 스트 결과 주행능력에 이상이 없는 대상자로 선정하여 평가
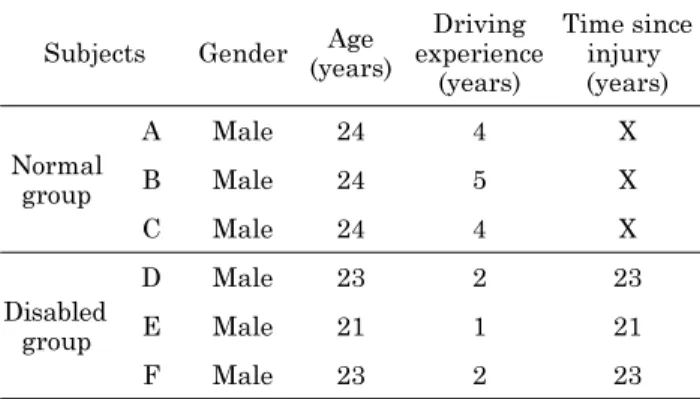
표 1. 실험 대상자 특성.
Table 1. Characteristics of subjects.
Subjects Gender Age (years)
Driving experience
(years)
Time since injury (years)
Normal group
A Male 24 4 X
B Male 24 5 X
C Male 24 4 X
Disabled group
D Male 23 2 23
E Male 21 1 21
F Male 23 2 23
76
하였다. 학습에 의한 효과를 최소화하기위하여 좌측이나 우 측의 핸드컨트롤을 사용한 경험이 상대적으로 적은 초보 운 전의 장애인 그룹 대상자로 선정하였고, 지체장애 1명, 뇌 병변장애 2명으로 장애 유형은 다르지만 핸드컨트롤을 작동 하는데 이상이 없는 하지 장애인을 대상으로 평가하였다. 실 험에 참가한 피실험자 그룹 및 특성은 표 1과 같다.
그리고 장애인 피실험자 D는 지체장애 1급으로 인지평가 를 제외한 도수근력평가(Manual Muscle Test (MMT))를 하였고, 피실험자 E와 F는 뇌병변 장애 1급으로 도수근력 평가(MMT)를 포함한 인지평가인 MMSE (Mini-Mental State Examination)-K 와 시지각 평가인 MVPT (Motor- Free Visual Perception Test), TMT (Trail Making Test)-A, B 를 실시하였다. 도수근력평가(MMT) 결과(표 2) 어깨 및 팔꿈치 관절의 경우 충분한 저항 하에서 능동적 정 상 관절운동이 가능한 것으로 나타났으며, 무릎과 발목 관 절의 경우 능동적 관절 운동이 거의 어려운 것으로 나타났 다. 인지능력을 평가하는 MMSE-K에서 두 대상자 모두 만 점을 받아 인지능력에는 이상이 없는 것으로 평가되었고, 시 지각 능력을 검사하는 MVPT 평가에서 두 대상자 모두 정 상범위(32~36)에 속하였고, TMT 평가도 정상범위(A: 78 초 이상 문제 있음, B: 273초 이상 문제 있음)안에 포함되 기 때문에 본 실험에 적합한 대상자로 확인되었다(표 3).
2. Experimental setup
(1) Measurement of electromyogram (EMG)
2 가지 종류의 핸드 컨트롤(좌측 및 우측 핸드컨트롤)을 손 으로 동작하여 가속 및 감속을 수행할 때의 근육 활성화 정 도를 분석하기 위하여 MP150 System (Biopac Systems, USA) 장비를 사용하였다. 왼쪽 또는 오른쪽 팔에 총 6개의 표면 전극(TSD-150B, Biopac System)을 부착하였으며, 전극 부착 위치는 후방어깨세모근(Posterior deltoid), 중간 어깨세모근(Middle deltoid), 위팔세갈래근(Triceps), 위팔 두갈래근(Biceps), 손목굽힘근(Flexor carpi radialis), 그 리고 손목폄근(Extensor carpi radialis) 이다. 근전도 측 정 시 게인 값은 1000, 동상성분제거 비(CMRR)는 110 dB 로 설정하였다. 샘플링 주파수는 1,000 Hz로 설정하였으며, 전원 노이즈를 제거하기 위해서 60 Hz 주파수 차단 필터 (Band Stop Filter) 를, 움직임과 관련된 노이즈를 제거하 기 위하여 20 Hz 고역통과필터(High Pass Filter)를 사용 하였다. 또한, 각각의 근육의 활성화 정도를 비교하기 위하 여 EMG신호에 대한 절대값을 계산한 후 실제 동작구간에 서의 평균값을 분석하였다. 또한, 실험대상자에 따른 EMG 신호의 영향을 최소화하기 위하여 대상자 별로 좌측핸드컨 트롤을 사용할 때에 동작하는 6개의 근육에 대한 3회 반복 실험 중 최대값을 기준으로 측정된 EMG 데이터 값을 나 누어 줌으로써 정규화(Normalization)를 수행하였다.
(2) Driving simulator
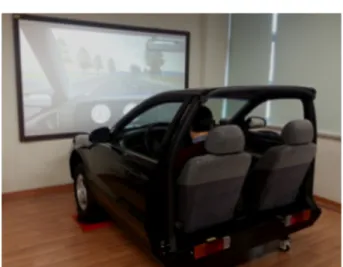
가상환경에서 2가지 종류의 핸드 컨트롤을 사용할 때의 상지 근육의 활성화 정도와 운전 성능을 평가하기 위해 가 상 운전시뮬레이터를 구축하여 실험을 수행하였다. 운전시 뮬레이터는 중형 급 승용차의 운전석 뒷부분인 B필라까지 절단하였으며, 엔진을 제외한 운전석 및 기타 제어장치는 실 제 차량과 동일하게 작동하도록 제작하였다(그림 1). 운전시 뮬레이터의 도로 환경을 위한 운전 프로그램으로 STISIM Drive (System Technology Inc., USA) 를 사용하였다[12].
(3) Two types of hand controls
그리고 실험에서는 사용한 제품은 가장 대표적인 수입제
표 2. 도수 근력 평가 결과.Table 2. Results of Manual Muscle Test (MMT).
Subjects Shoulder
flexor
Elbow flexor/
extensor
Flexor/ extensor capri radialis
Finger flexor/
extensor
Hip flexor
Knee extensor
Ankle dorsiflexor
Disabled group
D Left
Normal Normal Fair plus Fair plus
Trace Trace Trace
Right Normal Normal Normal
E Left
Normal Normal Fair plusl Fair plus
Poor minus Trace Trace
Right Fair plus Fair Fair
F Left
Normal Normal Fair plus Fair plus
Poor minus Poor minus Poor minus
Right Fair plus Fair Fair
표 3. 시지각 및 인지능력 평가 결과.
Table 3. Visual-perception and cognition evaluation results of disabled group.
Subjects MMSE-K MVPT score (sec)
TMT A (sec)
TMT B (sec) Disabled
group
E 30 33 17.84 64.51
F 30 34 25.67 60.46
77 품으로 좌측 핸드컨트롤은 캐나다 Sure Grip회사의 Push/
Pull 제품으로 선정하였고, 우측핸드컨트롤은 일본 Nissin회 사의 하이디럭스(AT993) 제품으로 선정하였다. 좌측 핸드 컨트롤은 Column type으로 조향 축에 부착하여 작동하는 장치이고, 우측 핸드컨트롤은 Floor type으로 운전자 좌석 바닥에 설치하여 작동하는 장치이다. 두 제품 모두 작동방 법은 손으로 핸드컨트롤 레버를 잡고 중립 위치(Neutral position) 에서 운전자의 앞쪽 방향으로 밀면(Push) 브레이
크 페달을 눌러 제동이 되고, 중립 위치에서 레버를 운전자 몸쪽 방향으로 당기면(Pull) 가속페달을 눌러 가속이 된다.
설치된 두 장치의 작동모습은 그림 2와 같다.
(4) Experimental procedure
본 연구에서는 좌측 및 우측 핸드컨트롤을 동작할 때 사 용자의 근육 활성화 정도와 기기의 운전 성능을 비교 분석 하고자 하였다. 먼저 핸드컨트롤 사용시 발생하는 근전도 신 호(EMG)를 측정하기 위해 실험 전 스트레칭 및 상체준비 운동을 가볍게 실시하였고, 10분 휴식 후 시뮬레이터에 설 치된 좌측 및 우측 핸드컨트롤을 각 10회씩 동작 연습을 하 였다. 10회 동작연습이 종료되면, 중립위치에 핸드컨트롤을 놓고 핸드컨트롤을 잡은 상태에서 신호에 맞춰 레버를 앞쪽 으로 밀고, 신호가 종료되면 다시 중립위치로 되돌아 온다. 다 시 동작 신호가 울리면 레버를 몸쪽 방향으로 당기고, 신호가 종료되면 다시 중립위치로 되돌아 오게 되면 1회가 끝나는 방 식으로 각 장치에 따라 3회 반복 실험을 하였다(그림 3).
또한 손으로 가감속 페달을 조작하는 핸드컨트롤의 기기 성능을 평가하기 위해서 운전시뮬레이터의 주행 프로그램을 통해 가속 및 제동 특성과 관련된 지정속도 도달시간, 제동 반응시간을 측정하였다. 기기의 성능 평가를 위한 시나리오 는 STISIM Drive (System Technology Inc., USA) 소프 트웨어를 이용해서 2차선(편도 1차선)의 도로를 구성하였다
그림 1. 가상운전 시뮬레이터.Fig. 1. Virtual driving simulator.
그림 2. 좌측 및 우측 핸드 컨트롤을 사용할 때의 동작 단계.
Fig. 2. Operation steps for using left and right hand controls.
그림 3. 핸드컨트롤을 밀고 당기는 동작을 수행할 때의 근육 작용을 측정하기 위한 동작 구간.
Fig. 3. Movement steps for measuring of muscle activity during pulling and pushing motion with hand controls.
78
( 그림 4). 평가전 대상자는 10분 동안 훈련을 하였고, 10분 휴식 뒤 평가를 시작하였으며, 실험에서 작동할 핸드컨트롤 은 무작위(Random)로 선택하였다. 가속평가의 경우 정속 주행(약 80 km/s) 속도의 95%까지 속도도달 시간을 측정 하였고, 제동반응평가는 정속주행 중 무작위 시간대에 나타 나는 STOP표시에 브레이크를 끝까지 눌러 속도가 0 km/s 가 되는 시간까지 측정하였다. 각 장치에 따라 총 3회 반복 실험을 수행하였다.
(5) Data analysis
2 가지 종류의 핸드컨트롤을 사용할 때의 운전자의 상지에 서 측정한 6가지 근육의 EMG 데이터와 주행성능 데이터 를 분석하기 위해 Math Works회사의 MATLAB R2012a Version 을 사용하였고, EMG 데이터의 경우 수집한 데이 터에서 절대값을 계산하였으며, 실제 동작 구간에서의 Nor- malized EMG 평균값 및 표준편차를 계산하였다.
운전 시뮬레이터에서 2개의 피실험자 그룹(비장애인 그 룹, 장애인 그룹)과 2가지 종류의 가감속을 위한 핸드컨트 롤 운전 보조장치(좌측 핸드컨트롤, 우측 핸드컨트롤)에 대 한 6가지 상지 근육(후방어깨세모근, 중간어깨세모근, 위팔 세갈래근, 위팔두갈래근, 손목굽힘근 및 손목폄근)의 EMG 반응을 분석하기 위해서 SPSS 18.0 통계 프로그램을 이용 하였다. 또한, 2가지 독립변수(피실험자 그룹과 좌측/우측 핸 드컨트롤)에 대한 EMG 신호를 분석하기 위하여 Two-way ANOVA 방법을 사용하였으며, 2가지 독립변수가 각각의 EMG 반응에 미치는 영향을 검증하기위하여 부분에타제곱 값(Partial η
2)을 제시하였다. 그리고 p 값이 0.05 미만인 경우에 통계학적인 유의성이 있는 것으로 정의하였다.
III. 결 과
1. The average EMG response associated with types of hand controls during pulling movement
좌측 및 우측의 2가지 종류의 핸드컨트롤을 사용하여 가 속할 때 비장애인과 장애인 운전자의 6가지 상지 근육에서
의 EMG 특성을 분석하기 위하여 동작 구간에 대한 데이 터를 정규화(Normalization) 하여 평균값과 표준편차를 계 산하였다. 운전시뮬레이터에서 피실험자가 가속을 위하여 핸 드컨트롤 레버를 중립 위치에서 몸쪽방향으로 당길 때 어깨 관절을 뒤로 동작하게 하는 후방어깨세모근의 Normalized EMG 평균값을 보면(그림 5(a)), 좌측 핸드컨트롤을 사용할 때보다 우측 핸드컨트롤을 사용할 때가 평균 41.3% 유의하 게 증가 하는 것으로 나타났으며(p < 0.05, η
2= 0.19), 비 장애인 그룹과 장애인 그룹에서의 근육 작용의 차이는 거의 없는 것으로 나타났다. 당길 때 어깨 관절을 옆으로 들어올 리도록 동작하는 중간어깨세모근의 Normalized EMG평균 값을 보면(그림 5(b)), 비장애인 그룹과 비교해서 장애인 그 룹에서의 근육 활성도가 평균 71.4% 유의하게 증가하였으 며(p < 0.01, η
2= 0.23), 좌측 핸드컨트롤과 우측 핸드컨트 롤의 차이는 거의 없는 것으로 나타났다.
당길 때 팔꿈치 관절을 펴게 하는 위팔세갈래근의 Nor- malized EMG 결과를 보면(그림 5(c)), 비장애인 그룹과 비 교해서 장애인 그룹에서 평균 103.2% 유의하게 증가하였으 며(p < 0.05, η
2= 0.20), 좌측 핸드컨트롤과 우측 핸드컨트
그림 4. 핸드컨트롤을 이용한 차량의 가속 및 제동 성능을 측정하기위한 운전 코스.
Fig. 4. Basic driving course for acceleration and braking performance.
그림 5. 좌측 및 우측 핸드컨트롤을 당기는 동작을 수행할 때 작용하 는 6가지 근육의 EMG 측정결과.
Fig. 5. Means and standard deviations of EMG response for six muscles during pulling movement of hand controls.
79 롤의 차이는 거의 없는 것으로 나타났다. 당길 때 팔꿈치 관
절을 굽히도록 동작하는 위팔두갈래근의 Normalized EMG 결과를 보면(그림 5(d)), 실험대상자 그룹과 좌/우측 핸드컨 트롤 모두 활성도 차이는 거의 없는 것으로 나타났다.
당길 때 손목굽힘근의 Normalized EMG 결과를 보면 ( 그림 5(e)), 피실험자 그룹과 좌 우측 핸드컨트롤 모두에서 거의 비슷하게 근육이 작용하는 것으로 나타났다. 당길 때 손목폄근의 Normalized EMG 결과를 보면(그림 5(f)), 비 장애인 그룹과 비교해서 장애인 그룹에서의 근육 활성도가 평균 45.7% 유의하게 감소 하였으며(p < 0.01, η
2= 0.19), 좌측 핸드컨트롤러와 우측 핸드컨트롤의 차이는 거의 없는 것으로 나타났다. 또한, 6가지 근육 중에서 당기는 동작과 관련된 후방어깨세모근과 중간어깨세모근, 위팔세갈래근의 작용이 가장 큰 것으로 나타났다.
2. The average EMG response associated with types of hand controls during pushing movement
좌측 및 우측의 2가지 종류의 핸드컨트롤을 사용하여 제 동할 때 비장애인과 장애인 운전자의 6가지 상지 근육에서 의 EMG 특성을 분석하기 위하여 동작 구간에 대한 데이 터를 정규화(Normalization) 하여 평균값과 표준편차를 계 산하였다. 운전시뮬레이터에서 피실험자가 제동을 위하여 핸 드컨트롤 레버를 중립 위치에서 몸의 앞쪽방향으로 밀 때 어깨 관절을 뒤로 동작하게 하는 후방어깨세모근의 Nor- malized EMG 결과를 보면(그림 6(a)), 비장애인 그룹과 비 교해서 장애인 그룹에서의 근육 활성도가 평균 42.4% 유의 하게 증가하였으며(p < 0.01, η
2= 0.46), 좌측 핸드컨트롤 과 우측 핸드컨트롤의 차이는 거의 없는 것으로 나타났다.
밀 때 어깨 관절을 옆으로 들어올리도록 동작하는 중간어깨 세모근의 Normalized EMG 결과를 보면(그림 6(b)), 비장 애인 그룹과 비교해서 장애인 그룹에서의 근육 활성도가 평 균 59.9% 유의하게 증가하였으며(p < 0.05, η
2= 0.22), 좌 측 핸드컨트롤을 사용할 때보다 우측 핸드컨트롤을 사용할 때가 평균 34.2% 유의하게 증가 하는 것으로 나타났다(p <
0.05, η
2= 0.10).
밀 때 팔꿈치 관절을 펴게 하는 위팔세갈래근의 Nor- malized EMG 결과를 보면(그림 6(c)), 실험대상자 그룹과 좌/우측 핸드컨트롤 모두 활성도 차이는 거의 없는 것으로 나타났다. 밀 때 팔꿈치 관절을 굽히도록 동작하는 위팔두 갈래근의 Normalized EMG 결과를 보면(그림 6(d)), 비장 애인 그룹과 장애인 그룹에서의 근육작용이 거의 차이가 없 는 것으로 나타났으며, 좌측 핸드컨트롤을 사용할 때보다 우 측 핸드컨트롤을 사용할 때가 평균 64.4% 증가하는 것으로 나타났다(p < 0.01, η
2= 0.21).
밀 때 손목굽힘근의 Normalized EMG 결과를 보면(그
림 6(e)), 실험대상자 그룹과 좌/우측 핸드컨트롤 모두 활성 도 차이는 거의 없는 것으로 나타났다. 밀 때 손목폄근의 Normalized EMG 결과를 보면(그림 6(f)), 비장애인 그룹 과 비교해서 장애인 그룹에서의 근육 활성도가 평균 113.6%
유의하게 증가 하였으며(p < 0.01, η
2= 0.74), 좌측 핸드컨 트롤을 사용할 때보다 우측 핸드컨트롤을 사용할 때가 평균 65.1% 유의하게 증가 하는 것으로 나타났다(p < 0.01, η
2= 0.57). 또한, 6가지 근육 중에서 미는 동작과 관련된 중간어 깨세모근 및 손목폄근의 작용이 가장 큰 것으로 나타났다.
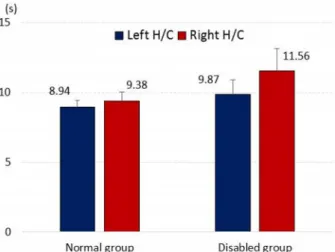
3. Braking and accelerating performance of hand controls 손으로 가감속 페달을 조작하는 핸드컨트롤의 기기성능을 평가하기 위해서 운전 시뮬레이터에의 주행 프로그램을 통 해 가속 및 제동 특성과 관련된 제동 반응시간 및 지정속도 도달 시간을 분석하였으며, 비장애인의 우측핸드컨트롤의 사 용시 제동반응 시간이 평균 0.65초로 운전면허 시험장에 설 치된 운전능력평가기기에 의한 검사 기준인 0.72초 미만에 만족하는 것으로 나타났다. 비장애인 그룹과 비교해서 장애 인 그룹에서의 제동 반응 시간이 평균 12.8% 증가 하였으
그림 6. 좌측 및 우측 핸드컨트롤을 미는 동작을 수행할 때 작용하는 6가지 근육의 EMG 측정결과.Fig. 6. Means and standard deviations of EMG response for six muscles during pushing movement of hand controls.
80
며, 좌측 핸드컨트롤을 사용할 때보다 우측 핸드컨트롤을 사 용할 때가 평균 5.6% 감소하는 것으로 나타났다(그림 7).
비장애인 그룹과 비교해서 장애인 그룹에서의 지정속도 (80 km/h) 도달시간이 평균 16.9% 증가 하였으며, 좌측 핸 드컨트롤을 사용할 때보다 우측 핸드컨트롤을 사용할 때가 평균 11.3% 증가하는 것으로 나타났다(그림 8).
IV. 결 론
가속할 때 비장애인과 장애인 운전자의 6가지 상지 근육 의 EMG 특성을 분석한 결과 핸드컨트롤 레버를 중립위치 에서 몸쪽방향으로 당길 때 어깨 관절을 옆으로 들어올리도 록 동작하는 중간어깨세모근, 팔꿈치 관절을 펴게 하는 위
팔세갈래근과 손목폄근의 경우 비장애인 그룹과 비교해서 장애인 그룹에서의 근육작용이 통계학적으로 유의하게 증가 하였으며(p < 0.05), 또한 좌측 핸드컨트롤을 사용할 때보다 우측 핸드컨트롤을 사용할 때가 후방어깨세모근의 활성도가 통계학적으로 증가 하는 것으로 나타났다(p < 0.05). 그리고 6 가지 근육 중에서 당기는 동작과 관련된 후방어깨세모근과 중간어깨세모근, 위팔 세갈래근의 작용이 가장 큰 것으로 나 타났다.
제동할 때 비장애인과 장애인 운전자의 6가지 상지 근육 의 EMG 특성을 분석한 결과 핸드컨트롤 레버를 중립위치 에서 몸의 앞쪽방향으로 밀 때 후방어깨세모근, 중간어깨세 모근 및 손목폄근의 경우 비장애인 그룹과 비교해서 장애인 그룹에서의 근육작용이 통계학적으로 유의하게 증가하였으 며(p < 0.05), 또한 좌측 핸드컨트롤을 사용할 때보다 우측 핸드컨트롤을 사용할 때가 중간어깨세모근, 위팔두갈래근과 손목폄근의 활성도가 통계학적으로 증가 하는 것으로 나타 났다(p < 0.05). 그리고 6가지 근육 중에서 미는 동작과 관 련된 중간어깨세모근 및 손목폄근의 작용이 상대적으로 크 게 작용하는 것으로 확인되었다.
위급한 상황을 가정한 제동반응시간의 경우 비장애인 그 룹과 비교해서 장애인 그룹에서의 제동 반응시간이 평균 12% 증가하였으며, 좌측 핸드컨트롤을 사용할 때 보다 우 측 핸드 컨트롤을 사용할 때가 평균 5.6% 감소하는 것으로 나타났다. 80 km/h까지의 지정속도 도달 시간의 경우는 비 장애인그룹과 비교해서 장애인 그룹에서 평균 16.9% 증가 하였으며, 좌측 핸드 컨트롤을 사용할 때보다 우측 핸드 컨 트롤을 사용할 때 평균 11.3% 증가하는 것으로 나타났다.
이와 같은 결과는 장애인 그룹에서 운동 기능의 영향으로 인하여 제동 반응 시간과 지정속도 도달 시간이 증가하였으 며, 제동을 위하여 레버는 미는 동작의 경우 우측 핸드 컨 트롤이 더 용이하며, 반대로 가속을 위하여 레버는 당기는 동작의 경우 좌측핸들 컨트롤의 사용이 더 용이한 것으로 나타났다.
References
[1] Convention on the Rights of Persons with Disabilities, United Nations, 2006.
[2] Lee, B. W., Mobility law for people with disabilities and there is no policy, Welfare Trends, vol. 169, pp. 30-35, 2012.
[3] Nam, B. J., Current situation and issues of mobility for peo- ple with disabilities, Welfare Trends, vol. 174, pp. 22-27, 2013.
[4] Directive 2006/126/EC of the European Parliament and of the Council on Driving Licenses, Official Journal of the European Union, 2006.
[5] Freeman, C. C., Evaluation of adaptive automotive driving aids for the disabled, Bulletin of the New York Academy of Medicine, vol. 50, no. 4, pp. 536-544, 1974.
그림 7. 브레이크 페달을 이용한 제동 반응 시간 측정 결과.
Fig. 7. Means and standard deviations of brake reaction time.
그림 8. 가속 페달을 이용한 지정 속도(80 km/h) 도달 시간 측정 결과.
Fig. 8. Means and deviations of time for reaching target speed (80 km/h).
81
[6] Gurgold, G. D., Harden, D. H., Assessing the driving poten-tial of the handicapped, The American Journal of Occupa- tional Therapy, vol. 32, no. 1, pp. 41-46, 1978.
[7] Haslegrave C. M., “Car controls for physically handicapped drivers”, International Technical Conference on Experimen- tal Safety Vehicles, pp. 235-242, 1985.
[8] Koppa, R. J., State of the art in automotive adaptive equip- ment, The Human Factors, vol. 32, no. 4, pp. 439-455, 1990.
[9] Roush, L., Koppa, R., A survey of activation importance of individual secondary controls in modified vehicles, Assist Technology, vol. 4, no. 2, pp. 66-69, 1992.
[10] Lee, D-Y, Rhee, K-M, Lee, D-Y, Lee, S-C, Lee, S-W, Lee, M-J, Kim, K-M, A study on the conceptual design of cars accessible for persons with disabilities, The Journal od Spe- cial Education: Theory and Practice, vol. 5, no. 3, pp. 139- 159, 2004.
[11] Jung, W., Kim, Y., Development of smart driving system using iPod and its performance evaluation for people with severe physical disabilities in the driving simulator, Journal of the Ergonomics Society of Korea, vol. 31, no. 5, pp. 637- 646, 2012.
[12] Song, J., Kim, Y., Development and evaluation of smart sec- ondary controls using iPad for people with hemiplegic dis- abilities, Journal of the Ergonomics Society of Korea, vol.
34, no. 2, pp. 85-101, 2015.
[13] Murray-Leslie, C., Aids for disabled drivers, British Medical Journal, vol. 301, no. 24, pp. 1206-1209, 1990.
[14] Kim, J. Y., Lee, B. S., Shin, O. S., Cho, H. W., Kim, B. S., Measurement of the hand control operating force in cervical cord injured drivers, Annals of Rehabilitation Medicine, vol.
26, no. 1, pp. 32-36, 2002.
[15] Lee, D-Y, The amendment of the standards of driving ability test for the handicapped, Journal of Industrial and Technol- ogy, vol. 15, no. 2, pp. 77-86, 2003.
[16] McKnight, A. J., Green, M. A., Masten, F., Koppa, R. J., Assessment of vehicle safety problems for special driving populations, U.S. Department of Transportation, NHTSA, 1979.
[17] Pilkey, W., Thacker, J., Shaw, G., Hand control usage and safety assessment, U.S. Department of Transportation, Volpe Transportation Systems Center, 2001.
[18] Koppa, R. J., McDermott, M., Raab, C., Sexton, D. J., Human factors analysis of automotive adaptive equipment for disabled drivers, U.S. Department of Transportation, NHTSA, 1980.
[19] Peters, B., Driving performance and workload assessment of drivers with tetraplegia: an adaptation evaluation framework, Journal of Rehabilitation Research and Development, vol.
38, no. 2, pp. 215-224, 2001.
[20] Fowler, M., Elineni, S. K., Wills, M., Laurentis, K. D., Sundarrao., S., Roosmalen, L. V., Dubey, R., “A novel driv- ing simulator utilizing driver-by-wire controllers to test driv- ers with disabilities: evaluation of acceleration and braking controls”, RESNA Annual Conference, Arlington, VA., 2010.
[21] Boyce, M. W., Fekety, D. K., Smither, J. A., Resource con- sumption and simulator driving performance using adaptive controls, Assistive Technology, vol. 25, pp. 158-165, 2013.
[22] Hunter, J. A. A., Vries, J., Brown, Y., Hartmann, J. B., Hek- stra, A., Vidmar, G., Handbook of Disabled Driver Assess- ment, Forum of Mobility Centres, 2009.
[23] Pelletrito, J. M., Driver rehabilitation and community mobil- ity: Principles and Practice, Mosby, Missouri, 2006.