Journal of Institute of Control, Robotics and Systems (2014) 20(3):372-379
http://dx.doi.org/10.5302/J.ICROS.2014.14.9024 ISSN:1976-5622 eISSN:2233-4335
SLAM 기술의 과거와 현재
Past and State-of-the-Art SLAM Technologies
송 재 복, 황 서 연*
(Jae-Bok Song
1and Seo-Yeon Hwang
1,*)
1
Mechanical Engineering, Korea University
Abstract: This paper surveys past and state-of-the-art SLAM technologies. The standard methods for solving the SLAM problem are the Kalman filter, particle filter, graph, and bundle adjustment-based methods. Kalman filters such as EKF (Extended Kalman Filter) and UKF (Unscented Kalman Filter) have provided successful results for estimating the state of nonlinear systems and integrating various sensor information. However, traditional EKF-based methods suffer from the increase of computation burden as the number of features increases. To cope with this problem, particle filter-based SLAM approaches such as FastSLAM have been widely used.
While particle filter-based methods can deal with a large number of features, the computation time still increases as the map grows.
Graph-based SLAM methods have recently received considerable attention, and they can provide successful real-time SLAM results in large urban environments.
Keywords: SLAM, Kalman filter, particle filter, GraphSLAM, bundle adjustment, mobile robot
I. 서론
로봇이 미지의 공간 상에서 주행을 시작하는 경우 주변환 경에 대한 아무런 정보가 없다. 따라서 로봇이 위치정보에 기반하여 작업을 수행하기 위해서는 센서정보를 이용하여 환경에 대한 지도를 작성하고, 동시에 작성된 지도로부터 로 봇의 현재 위치를 추정하는 SLAM (Simultaneous Localization And Mapping) 과정이 필요하다. 최근 성공적으로 상용화된 위치인식 기능이 탑재된 청소로봇의 경우를 예로 들면, 전원 을 켰을 때의 위치를 기준점으로 설정하여 장착된 센서(예, 비전센서, 거리센서)로부터 수집한 정보로 지도를 작성하는 동시에, 자신의 위치를 실시간으로 추정하여 청소한 구역과 청소해야 할 구역을 구분한다.
SLAM에는 거리센서, 비전센서 등 다양한 종류의 센서가 사용된다. 거리센서는 대표적으로 레이저스캐너, 적외선스캐 너, 초음파센서, 라이다(LIDAR), 레이더(RADAR) 등이 있으 며, 비전센서에는 스테레오카메라, 모노카메라, 전방향카메라, Kinect 등이 포함된다. 거리센서는 쉽게 물체까지의 거리정보 를 얻을 수는 있지만, 활용할 수 있는 정보의 종류가 제한적 인 단점이 있다. 반면에, 비전센서는 영상정보의 가공을 통해 거리 및 인식된 물체 등 다양한 종류의 정보를 획득할 수 있 어 근래에 각광을 받고 있으나, 대부분 많은 연산량을 필요 로 한다. 보통 이동로봇 분야에서 이러한 센서정보는 주로 오도메트리(예, 엔코더, 관성센서) 정보와 융합하여 사용하지 만, 비전센서만으로 SLAM을 수행하는 연구도 활발히 진행 되고 있다.
센서 관측정보의 불확실성, 실시간성 확보, 넓은 환경에서
의 SLAM 등의 문제를 해결하기 위해 다양한 방법론이 연구 되었다. 대표적으로는 KF (Kalman Filter) [1-20,22-26], PF (Particle Filter) [27-31], graph [32-40] 및 BA (Bundle Adjustment) [43] 기반 방법 등이 있다. KF는 기본적으로 시스템의 선형성 을 가정하고 있으므로, 비선형 시스템에 적용하기 어렵다. 따 라서 일반적인 비선형 시스템에 대해서 사용 가능하도록 확 장한 EKF (Extended Kalman Filter), UKF (Unscented Kalman Filter) 등이 주로 사용되었다. EKF는 초기 추정이 잘못되었거 나 시스템 모델이 잘못 설계되었을 경우 쉽게 발산할 수 있 는 단점이 있으나, 현재 주행이나 GPS와 같은 비선형 상태 추정 등의 분야에서 좋은 성능을 발휘하고 있다. PF는 위치 불확실성을 샘플로 불리우는 입자의 무리로 표현한다. 샘플 의 개수가 충분하다면 EKF나 UKF보다 정확하지만 개수가 충분하지 않으면 문제가 발생할 수 있다. 또한 PF와 KF를 동시에 사용하는 방법도 있는데, RBPF (Rao-Blackwellized Particle Filter) 기반 SLAM이 대표적이다.
최근에는 그래프 기반 SLAM 방법이 주요 이슈가 되고 있 다. 이는 로봇과 특징들의 위치 관계를 구속조건들로 정의하 여 그래프를 작성하고 그래프가 교차하는 지점에서 전체 그 래프에 누적된 오차를 최소화하는 방법이다. 이전에는 많은 연산량으로 인해 실시간성이 떨어지는 문제가 있었으나, 최 근에는 이를 극복할 수 있는 다양한 방법들이 제안되었다 [35,37-40]. BA (Bundle Adjustment)는 비전을 이용한 SLAM 분 야에서 카메라와 특징들의 위치를 동시에 보정하는 용도로 주로 활용되고 있으며, 그래프 기반의 SLAM 방법과 함께 사용되기도 한다[44].
넓은 영역에서 SLAM을 수행할 시에는 작성한 지도에 오 차가 누적되어 과거에 방문한 지역을 재방문 할 때 지도가 일치하지 않는 문제가 발생할 수 있다. 이러한 환경에서는 재방문 여부를 판별하여 loop closure를 수행해야 한다. 최근 에는 비전 분야에서 bag-of-words 방법을 이용하여 비슷한 모 양의 특징을 그룹으로 묶어 하나의 word로 표현하고 빠른 Copyright© ICROS 2014
* Corresponding Author
Manuscript received January 24, 2014 / accepted February 3, 2014 송재복, 황서연: 고려대학교 기계공학부
([email protected]/[email protected])
※ 본 연구는 산업통상자원부 융복합형 로봇인력 양성사업의 지원으
로 수행되었음 (NIPA-2012-H1502-12-1002).
속도로 장소인식을 수행하는 연구가 활발히 진행되고 있다 [50].
SLAM 기술의 안정성이 크게 향상되고 임베디드 시스템 에서의 실시간성이 확보됨으로써 저가의 센서를 이용한 다 양한 방법들도 제안되었다. 주로 천장지향 카메라 또는 전방 카메라를 사용하거나 감지거리가 짧은 거리센서를 사용하여 SLAM을 수행하였다.
본 논문은 다음과 같이 구성된다. II 장에서는 KF 기반의 SLAM 방법을, III 장에서는 PF 기반의 SLAM 방법을 소개한 다. IV 장에서는 최근에 이슈가 되고 있는 그래프 및 bundle adjustment 기반 SLAM 기법들을 소개한다. 마지막으로, V 장 에서는 결론을 도출한다.
II. Kalman Filter 기반 SLAM
Kalman filter는 가장 널리 사용되는 Bayes filter의 변종이며, 선형시스템에 적용 가능한 상태추정 기법이다. 그 중에서 EKF (Extended Kalman Filter)와 UKF (Unscented Kalman Filter)는 로봇의 이동과 센서 측정에 관한 비선형 정보를 다루기 위해 사용되어 왔다. EKF는 다양한 시스템에 적용이 용이하고, 대 부분의 비선형시스템에서 좋은 추정성능을 제공해 주므로 SLAM 분야에서도 널리 사용되어 왔다. 비선형시스템에서 EKF의 정확성을 보완하기 위하여 UKF도 SLAM에 사용되기 시작했다[1]. 그러나 비선형성이 강한 시스템이 아니면 EKF 와 UKF의 결과가 크게 차이가 나지 않고, UKF는 적용이 까 다롭기 때문에 상대적으로 EKF가 많이 사용되고 있다.
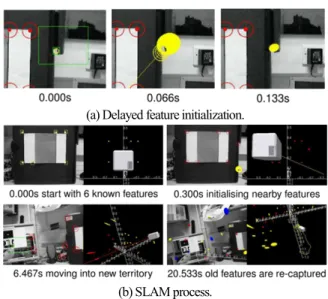
모노카메라를 이용하는 경우 한 시점에서 특징에 대한 방 위정보를 얻을 수 있으나 거리는 알 수 없다. 따라서 여러 시점에서의 관측정보를 통해 특징의 위치를 계산하는 특징 초기화(feature initialization) 과정이 필수적이다. 특징 초기화는 필터 내부에서 수행되는지의 여부에 따라 지연(delayed) 및 지연이 없는(undelayed) 방식으로 나뉜다. 지연 방식은 필터에 새로운 특징을 등록하기 이전에 필터 외부에서 특징의 위치 를 대략적으로 결정하는 방법이다. 이는 모노카메라 기반 SLAM의 초기에 거리를 가늠하기 어려운 특징들이 환경에 존재하는 경우 주로 사용되었다[2,3]. 지연이 없는 방식은 새 로운 특징이 관측되면 즉시 필터에 등록시키고, 추가 관측정 보로부터 특징의 위치 불확실성을 감소시켜 나간다.
다른 센서정보 없이 모노카메라 하나만을 이용하여 SLAM 을 수행하는 연구도 활발히 진행되어 왔다. 초기에는 좁은 사무실 환경에서 코너 특징을 사용하였으며, 위치를 알고 있 는 특징들로부터 SLAM을 시작하여 주변으로 지도를 확장하 였다. 위치가 정확히 추정된 특징들을 관측해야 카메라의 위 치를 지속적으로 추정할 수 있으므로, 아무런 정보가 없는 SLAM 초기에는 위치를 알고 있는 몇 개의 특징들에 의존하 여 SLAM을 수행하였다. 새로 관측된 특징의 3차원 위치는 PF를 이용한 지연방식으로 초기화하였다[2]. 그림 1(a)와 같 이 특징이 관측된 방향으로 샘플을 직선 모양으로 분포시키 고, 시점의 변화에 따라 샘플이 일정 길이 이하로 수렴하여 가우시안 분포로 근사화시킬 수 있을 때 EKF에 등록하여 그 림 1(b)와 같이 위치추정에 활용하였다. 이 모노카메라 기반 SLAM 기법은 이족로봇에도 적용되어 실내공간에서 성공적 인 결과를 얻기도 하였다[3].
초기 모노카메라 기반 SLAM의 문제점은 거리가 먼 특징 들의 경우 위치 불확실성을 가우시안 분포로 표현하기 어려 운 것이었다. 따라서 EKF-SLAM의 구조에 새로운 특징을 등 록하기 위해서 지연 방식으로 특징을 초기화하였다. 거리가 먼 특징을 SLAM에 활용하기 위해서 가까운 거리에 있는 특 징과 먼 곳에 있는 특징을 구분하여 각기 다른 모델을 세워 위치추정에 기여할 수 있도록 하였다[4]. 또 다른 대안으로 위치 불확실성을 여러 가우시안 분포의 합(sum of Gaussians) 으로 표현하는 방법도 시도되었다[5]. 그러나 특징까지의 거 리의 역수(inverse-depth)를 이용하는 방법이 제안되면서 특징 의 거리에 관계없이 지연이 없는 초기화가 가능하게 되었다 [6]. 그림 2에 inverse-depth를 이용한 특징의 위치 불확실성이 나타나 있다. 시점 변화에 따라 시차 α 가 증가하여 위치 불 확실성이 수렴하는 것을 확인할 수 있다.
Inverse-depth를 이용하면 무한대 거리에 존재하는 특징의 위치도 가우시안 분포로 표현이 가능하다. 그러나 3차원 특 징의 위치가 3개 파라미터로 표현되는 것과는 달리, inverse- depth를 이용할 경우 6개의 파라미터로 표현되므로 특징 개
(a) Delayed feature initialization.
(b) SLAM process.
그림 1. 모노카메라 기반 SLAM.
Fig. 1. Feature initialization for monocular vision-based SLAM.
그림 2. 카메라 시점 변화에 따른 inverse-depth 기반 불확실성 영역의 수렴.
Fig. 2. Convergence of an uncertainty region according to camera
viewpoint changes.
송 재 복, 황 서 연 374
수의 증가에 따라 EKF의 연산부하가 더욱 증가하게 되었다.
이문제를 해결하기 위하여 inverse-depth 표현을 depth에 대한 표현으로 전환할 경우의 위치 불확실성 표현에 대한 오차를 계산하고, 오차가 적정수준인 경우 3개 파라미터로 전환하여 EKF의 부하를 감소시키는 방법이 고안되었다[6-8].
이동로봇을 위한 비전센서 기반의 SLAM은 카메라의 방향 및 종류에 따라 다양한 방법들이 시도되었다. 먼저 측면 모 노카메라 영상으로부터 코너 및 직선 특징을 추출하여 EKF- SLAM을 수행하는 방법이 제안되었다[9,10]. 카메라를 로봇 의 측면에 부착하면 로봇이 전진할 경우 특징을 관측할 때 큰 시차를 얻을 수 있다. 시차가 크면 높은 정확도로 특징의 위치를 결정할 수 있으며 KF를 통해 로봇의 위치를 보다 정 확히 추정하는 데 도움이 된다.
로봇의 전방을 향하는 카메라를 사용하는 경우 특징의 스 케일 및 어파인(affine) 변화 등을 고려해야 한다. 따라서 SIFT, SURF와 같은 방법을 통해 추출한 특징 또는 인식한 물 체가 주로 SLAM에 활용되었다. 스테레오카메라를 사용하는 경우 특징까지의 거리가 제공되므로 지연 없이 특징을 초기 화할 수 있었다[11]. 그러나 모노카메라의 경우 PF를 이용한 지연 방식의 초기화 과정을 수행한 이후 EKF에 특징을 등록 하였다[12].
실내공간에서 천장 지향 카메라를 사용하면 다양한 이점 이 있다. 로봇의 이동에 따라 특징과 카메라 사이의 거리와 카메라의 방향이 변화하지 않으므로 특징의 스케일, 어파 인 변화를 고려하지 않아도 된다. 또한 로봇 주변의 사람과 같은 동적 장애물이 카메라의 시야를 방해하지 않아 지속 적인 SLAM이 가능하다. 그리고 일반적으로 천장의 높이는 제한적이므로 지연 없는 특징 초기화가 가능하다. 이러한 이점들을 바탕으로 코너특징 기반의 EKF-SLAM을 수행하 는 방법이 제안되었다[13,14]. 천장에 존재하는 특징들은 영 상 안에서 로봇의 회전에 따라 같이 회전할 뿐 모양이 변 하지는 않지만, 벽, 책장 등에 존재하는 특징들은 로봇의 이동에 따라 변형된다. 이러한 문제에 대처하기 위하여 특 징의 변형이 일어날 때마다 특징을 새로 등록하는 방법이 제안되었다[13].
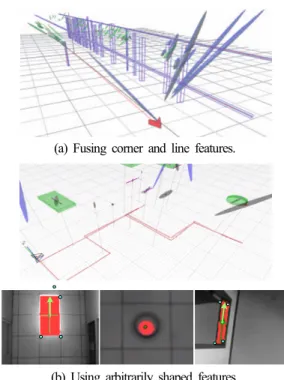
천장영상에 의존하여 SLAM을 수행하는 경우 환경에 따라 특징 개수가 부족한 경우가 있다. 특징이 부족하면 위치오차 가 누적되어 필터가 발산할 위험이 커지게 된다. 따라서 다 른 종류의 특징을 융합하는 연구도 진행되었다. 일부 연구에 서는 그림 3(a)와 같이 직선특징을 사용하여 보다 안정적인 SLAM 결과를 얻고자 하였다[15,16]. 그리고 직선특징의 정합 이 불안정한 문제를 해결하기 위하여 지면에 수직, 수평한 직선들의 조합으로 문 특징을 추출하여 코너특징과 융합한 사례도 있었다[17]. 실내공간에서는 켜져 있는 조명도 강인한 특징으로 활용할 수 있다. 따라서 코너, 조명 특징을 이용한 SLAM 방법도 제안되었다[18,19]. 최근에는 그림 3(b)와 같이 천장에서 독특한 모양을 가진 임의형상 특징을 추출하여 특 징으로 활용하는 연구도 있었다[20,21]. 천장 지향 카메라 기 반 SLAM은 다른 방법들에 비해 상대적으로 연산량이 적어 저사양의 임베디드 시스템에서 동작 가능하므로, 청소로봇 등의 로봇에 탑재되어 성공적으로 상용화되었다.
(a) Fusing corner and line features.
(b) Using arbitrarily shaped features.
그림 3. 천장지향 모노카메라 기반 SLAM.
Fig. 3. Ceiling vision-based SLAM.
제한된 화각을 갖는 일반적인 카메라와 달리 특수 제작된 거울을 이용하는 전방향 카메라 기반의 SLAM 방법도 있다.
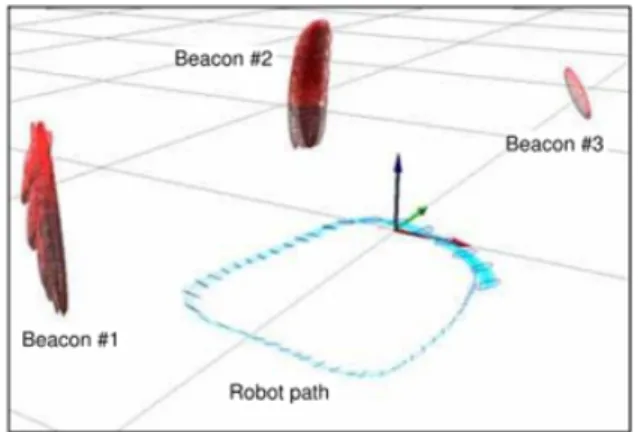
전방향 영상은 왜곡이 심하지만, 360° 화각을 제공하므로 주 변에 존재하는 특징들을 장시간 추적할 수 있다. 지면에 수 직한 직선들의 경우 전방향 영상의 중심을 관통한다. 이러한 성질을 이용하여 직선특징 기반의 SLAM을 수행하는 방법이 제안되었다[22]. 또한 전방향 카메라로 지면에 수직한 직선을 추출하고, 레이저스캐너로 지면에 수평한 직선을 추출하여 EKF로 특징정보를 융합하고 위치추정을 수행하는 방법도 제 안되었으며[23], 그림 4에 SLAM 결과가 나타나 있다.
초음파센서 정보로부터 특징을 추출하여 EKF-SLAM을 수 행한 연구 결과도 있다[24,25]. Sliding data window를 사용하여 최근에 측정된 초음파센서 정보를 수집하고, 수집한 정보의 양상을 분석하여 벽의 코너, 돌출된 부분 등에서 강인한 특 징을 추출하였다. 제안된 특징은 기존의 직선, 점 특징들보다
(a) Camera.
(b) Example image. (c) SLAM results.
그림 4. 전방향 카메라를 이용한 EKF-SLAM.
Fig. 4. EKF-SLAM using omnidirectional camera.
안정적인 정합 결과를 제공해 주었으며, 결과적으로 실내 환 경에서 장시간 동안 실패 없이 초음파센서 기반 SLAM을 수 행할 수 있었다.
특징의 개수가 N이라고 할 때 EKF의 연산량은 O(N
2)으로 나타낼 수 있다. 따라서 특징의 개수가 증가할 때 연산량은 기하급수적으로 증가하여 넓은 환경에서 많은 개수의 특징 으로 실시간 SLAM을 수행하는데 어려움이 있다. 이러한 문 제를 해결하기 위하여 EKF로 부분지도를 작성하여 통합하는 방법들도 제시되었다[26].
III. Particle Filter 기반 SLAM
PF 기반의 SLAM에서는 RBPF 기반 방법이 주로 사용되어 왔다. 로봇의 위치는 PF를 이용하여 추정하며, 로봇의 위치 를 나타내는 샘플들은 각각 특징지도를 갖고 있다. 특징지도 들은 서로 조건부 독립이고, 별도의 필터(예, EKF)를 통해 특 징의 위치를 추정한다. 기본 개념은 Rao-Blackwellization을 통 해 다음과 같이 나타낼 수 있다.
1: 1: 1: 0: 1 1: 1: 0: 1 1: 1:
1
( , | , ) ( | , ) ( | , )
N
t N t t t t t i t t
i
p x l z u
-p x z u
-p l x z
=