CopyrightⒸ2012 KSAE / 2012 / 115-05 pISSN 1225-6382 / eISSN 2234-0149 Transactions of KSAE, Vol. 20, No. 1, pp.28-38 (2012)
유연체 동역학 모델과 전력전자 회로의 연동해석을 통한 단기통 왕복 압축기 거동해석에 관한 연구
성 원 석*1)․황 원 걸2)
전남대학교 지역-바이오시스템공학과1)․전남대학교 기계시스템공학부2)
A Study on Dynamic Behaviour of Single Cylinder Reciprocating Compressor by Joint Simulation of Flexible Multi-body Dynamics
and Electromagnetic Circuit
Won-Suk Sung*1)․Won-Gul Hwang2)
1)Department of Rural & Bio-systems Engineering, Chonnam National University, Gwangju 500-757, Korea
2)School of Mechanical Systems Engineering, Chonnam National University, Gwangju 500-757, Korea (Received 20 August 2010 / Revised 14 July 2011 / Accepted 29 July 2011)
Abstract : The characteristics of vibration and noise of a compressor used for electric appliances have significant influence on the quality of the products. For improvement on the quality of electric appliances, investigations for understanding the dynamic behaviour of the compressor are essential. Since Virtual Lab for the dynamics model and MAXWELL for the electromagnetics model are separate software programs with no interface, the joint simulation of the models could not be performed. This study suggests a way to develop the compressor model capable of the joint simulation with MATLAB/SIMULINK linking a flexible multi-body dynamics model, a torque model, and an electricity control model. The compressor model is found to be able to perform I/O data transfer among the sub-models and joint simulation. The simulation results of the flexible body and rigid body dynamics models were compared to check availability of the joint simulation system. In addition, the simulated vibration and driving torque of the compressor mechanisms were compared with measurements. Through the simulations, the influence of springs and LDT on the dynamic behaviour of the compressor was examined. This study examines the influence of the dynamic behaviour of the compressor mechanisms through joint simulation of the flexible multi-body dynamics model and electromagnetic circuit allows analysis.
Key words : Joint simulation(연동해석), Flexbody (유연체), Multi-physics system(다중물리시스템), Compress(압축기)
1. 서 론1)
공조 및 냉동을 목적으로 널리 쓰이고 있는 압축 기는 기구부를 포함하는 본체, 구동모터, 그리고 제 어부로 구성되어 있다. 압축기는 본체, 구동모터, 제 어부 각각의 특성에 따른 운전특성이 달라진다. 이 와 같은 압축기를 설계하고 해석하기 위해서 압축
*Corresponding author, E-mail: [email protected]
기 전체를 대상으로하여 기계-전기시스템으로 모 델링하여 특성을 고찰할 필요가 있다.
현재까지는 각 부분의 특성을 각각 독립적으로 연구하는 것이 일반적이다. 기존의 압축기에 대한 연구는 주로 구조동역학이나,1,2) 전자기,3,4) 유체시 스템, 음향시스템 등 단일 물리계에 대해 개별적으 로 진행되었다.
운동부에 대해 강체 모델링에 의한 커넥팅로드,
유연체 동역학 모델과 전력전자 회로의 연동해석을 통한 단기통 왕복 압축기 거동해석에 관한 연구
크랭크축에 대한 동특성 및 이에 따른 프레임의 진 동해석1)등과 유한요소 해석을 통해 진동저감을 위 한 무게추 최적설계를 위한 연구2) 등과 맥동에 의한 LDT(Line Discharge Tube)의 진동 및 응력 해석, 기 구부의 궤적예측, 회전자 밸런스의 최적설계등과 같은 기구부에 대한 연구가 진행되었다. 기구부의 다물체 동역학 해석을 위한 상용코드로는 주로 Virtual.Lab6), RecurDyn, ADAMS, LS-DYNA 등이 활 용되고 있다.
압축기의 구동력을 발생시키는 모터에 대한 연구 로는 유한요소모델링을 통한 전자기분포, 철손, 코 깅토크 저감,3) 토크리플분석 및 저감4) 등과 같은 global force, 그리고 영구자석 형상에 따른 traction force등 모터의 회전속도 및 토크 산출을 위한 연구 와, 시스템의 효율성을 높이고 에너지 사용량 저감 및 운전속도 제어를 위한 PWM(펄스폭 변조 : Pulse Width Modulation) 등과 같은 연구가 있었다. 고정자 와 회전자간의 전자기 해석은 MAXWELL7), JMAG-Studio, OPERA-3d 등이 있고, 전자회로구성 및 제어를 위해 SIMULINK5), SIMPLORER7), EASY5 등이 활용되고 있다.
압축기의 구동력은 모터부와 전력제어부에 의해 발생되며, 제어되고 있다. 본 연구에서 모터에 의해 구동되는 기구부의 동특성을 파악하기 위해 구동토 크의 특징을 고려한 유연다물체동역학-전력-전자 를 연성한 다중물리시스템으로 압축기를 모델링하 였다.
다중물리시스템 모델링 과정에서 물리영역간 상관관계 또는 상호작용을 정의하여야 한다. 이 는 주로 해석도메인의 물성 및 경계조건 등이다.
상호작용의 원활한 포함을 위하여, 여러 물리분 야의 조건들을 동시에 고려할 수 있는 범용해석 기가 필요하다. 본 연구에서는 모델간의 인터페 이스를 만족하며, 연동해석간격의 제어 및 해석 순서 제어를 위해 SIMULINK 기반의 유연체 동역 학 모델과 전자기 모터모델 그리고 전력 제어기 모델이 연동된 다중물리시스템의 압축기 모델을 구현하였다. 그리고 연동해석과 시험을 통해 얻 은 결과를 상호 비교하여 압축기 모델의 유효성 을 입증하였다.
2. 압축기 모델
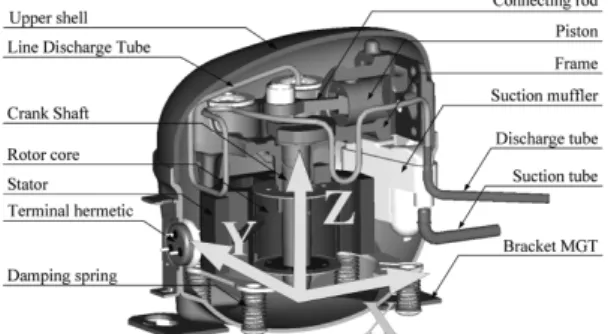
Fig. 1은 본 연구의 대상인 BLDC(BrushLess Direct Current)모터 구동 왕복 압축기의 구성요소 및 구조 를 나타낸 것으로 크게 프레임(frame)과 운동부로 구성된 기구부와 고정자와 회전부로 구성된 모터부 로 구분된다.
압축기의 모든 요소와 연결되는 프레임(frame)은 4개의 코일 스프링과 LDT에 의해 지지된다. 프레임 과 실린더는 일체형이며, 크랭크축의 회전운동을 위하여 저널부를 가지고 있다. 또한 모터부의 고정 자는 프레임에 고정되고 회전자계에 의해 회전자와 회전자에 압입된 크랭크 축은 회전하게 된다. 이때, 피스톤은 직선 왕복운동을 하며 냉매를 흡입-압축 하게 된다. 압축된 냉매는 LDT를 통해 본체를 빠져 나가게 된다.
Fig. 1 Coordinate system and composition of compressor
본 연구에서는 압축기의 기구부 동역학 모델을 Virtual.Lab을 통해 구성하였으며, 전자기부인 모터 와 제어기 모델을 MAXWELL, SIMPLORER를 통해 각각 모델링하였다. 그리고, SIMULINK에서 이들 을 연동시켜 시뮬레이션을 수행할 수 있는 다중물 리시스템을 구현하였다.
2.1 동역학 모델
압축기 구성요소에서 프레임 및 피스톤 등은 강 체로 모델링하였으며, 스프링과 LDT 등은 유연체 로 모델링하였다. 압축기 모델의 좌표계는 Fig. 1과 같이 회전축인을 크랭크 축의 중심선을 Z축으로 하 고 피스톤의 운동방향을 X축으로 하는 오른손 좌표 계이며, 원점은 크랭크축의 끝단부로 하였다.
Won-Suk Sung․Won-Gul Hwang
2.1.1 기구부 강체 모델
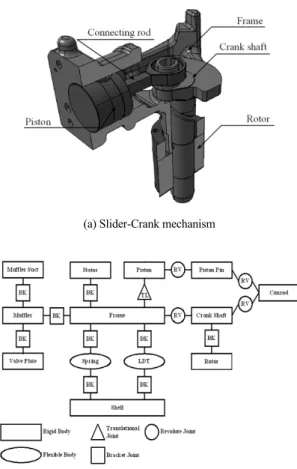
기구부는 Fig. 2(a)에 나타낸 바와 같이 피스톤, 커 넥팅로드, 크랭크축, 프레임으로 구성되어 있다. 여 기서 프레임은 피스톤과 직선운동을 위한 실린더, 크랭트 축의 회전을 위한 저널부, 그리고 스프링과 의 연결을 위한 브라켓를 가지고 있으며, 모터의 고 정자와 볼트체결되는 요소이다.
코일 스프링과 LDT를 제외한 피스톤, 커넥팅로 드, 크랭크축, 프레임 주강 재질이며, 스프링과 LDT에 비해 구조적으로 강성이 높으므로 강체로 모델링 하였다. 또한 프레임에 볼트로 완전 구속 되는 모터부의 고정자와 크랭크축이 압입된 회전 자는 프레임과 크랭크축에 완전 구속시켜 동일운 동체로 모델링하였으며, 기구학적 상관관계에 따 라 Fig. 2(b)와 같이 동역학 해석을 위한 모델을 구 성하였다.
(a) Slider-Crank mechanism
(b) Block diagram of compressor members Fig. 2 Configuration of dynamic model for compressor
2.1.2 코일 스프링 유연체 모델
스프링은 프레임을 지지하는 요소로서 프레임의 운동에 의해 압축, 인장, 좌굴되며 복잡한 운동을 하 게 된다. 또한 소선간에 접촉이 일어나 스프링의 강 성변화가 일어날 수 있으므로, 스프링을 유연체로 모델링하여 스프링의 영향을 파악할 필요가 있다.
코일 스프링은 7권의 유효권과 양 끝단의 2.5권의 무효권으로 구성되어 있다. 구속이 고려된 코일 스 프링 유한요소 모델은 소선간의 접촉을 고려하기 위하여 질량이 없는 강체구를 Fig. 3과 같이 90° 간 격으로 소선의 중심선을 따라 배치하고, 강체구 중 심점과 유한요소의 절점이 일치하도록 1권 길이의 1/4 패턴을 1set으로 하여 소선중심선을 따라 격자 를 생성하였다. 그리고 강체구의 중심점과 동일한 위치의 격자점을 강체연결 요소로 연결하여 소선간 접촉이 고려된 유한요소 모델을 완성하였다.
코일 스프링 유연체 모델은 구속이 고려된 유한 요소 모델의 진동모드중 1~6차 강체모드를 제외한 50차 모드(5,894Hz)까지 선택하여 코일 스프링 유연 체 모델을 구성하였다.
Fig. 3 Flexible body model of coil spring
2.1.3 LDT 유연체 모델
LDT는 압축된 냉매가 배출되는 통로이며, 스프 링과 함께 프레임을 쉘에 구속하는 요소이다. LDT 의 형상에 프레임 운동에 대한 구속력을 발생시키 는 요소로서 프레임의 거동에 중요한 역할을 한다.
LDT는 구리도금된 박판을 말아 제작된 2중권강 관으로 실험과 해석을 통해 LDT 유연체 모델의 물 성치를 결정하였다. 먼저 2중권강관의 고유진동수 를 비접촉 방식을 통해 측정하고, 시험에 적용된 LDT와 동일한 유한요소를 생성하고 고유진동수 해
A Study on Dynamic Behaviour of Single Cylinder Reciprocating Compressor by Joint Simulation of Flexible Multi-body Dynamics and Electromagnetic Circuit
Fig. 6 Connection method of compressor members Fig. 4 Modal test with non-touched type displacement meter Table 1 Natural frequency comparison between modal test
and FEM (Hz)
Mode 1st 2nd 3rd 4th 5th
Test 15.63 101.56 285.94 557.81 918.75 FEM 15.64 98.04 274.21 536.64 885.56
석을 수행하였다. 이때, 유한요소 모델의 고유진동 수가 측정된 고유진동수에 근접하도록 탄성계수를 조정하였다. 이를 통해 LDT 유연체 모델의 등가물 성치를 결정하였다. 모달 테스트와 통해 측정된 고 유진동수를 Fig. 4와 Table 1에 나타내었다.
유연체 모델은 구속이 고려된 진동모드중 1~6차 강체모드를 제외한 50차 모드(4,787Hz)까지 선택하 여 구속이 고려된 LDT 유연체 모델을 구성하였다.
2.1.4 실린더 압력
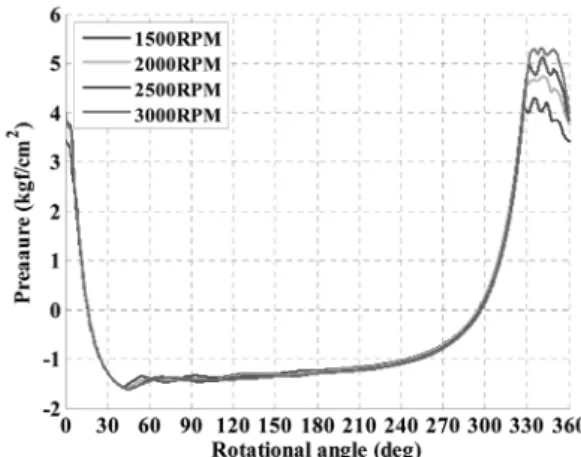
압축기 실린더 내부의 압력은 피스톤운동에 대한 반력으로 작용한다. 압축기의 성능평가 시 미국냉동공 조학회(ASHRAE)에서 제안한 흡입압력 0.636kgf/cm2, 토출압력 5.5032kgf/cm2에서 500RPM단위로 실린더 내부압력을 측정하여 이를 적용하였다. Fig. 5는 운
Fig. 5 Pressure curve of cylinder
전속도 1500~3000RPM에서 실린더 내부압력변화 를 나타낸 것이다.
2.1.5 압축기 요소의 연결
압축기의 요소간 상관관계는 피스톤-프레임은 병진 운동을 하고, 피스톤-피스톤 핀, 피스톤 핀-커 넥팅 로드, 커넥팅 로드-크랭크 축, 크랭크 축-프레 임은 각각 1축 회전운동, 그리고 크랭크 축과 회전 자는 완전구속의 관계를 갖는다.
피스톤에 작용하는 압축력과 회전자계에 의한 토 크의 입력과 회전자의 회전속도와 회전각의 출력을 위한 입출력단을 정의하였다. Fig. 6과 같이 3가지 조인트 모듈과 플랜트 모듈을 통해 압축기 기구부
성원석․황원걸
요소와 외부로의 데이터 입출력을 정의하였다.
2.2 전자기부 모델
2.2.1 모터(BLDC) 모델
모터에서 발생되는 구동토크는 압축기 기구부 동 특성에 직접적인 영향을 미치게 된다. 구동토크는 모터의 특성곡선을 이용하여 운전 RPM별 토크를 선형 보간을 통해 적용하거나, 구동 중 일정하게 발 생하는 토크 리플을 표현하기 위해 고정자와 회전 자의 상관관계에 따른 사인파 형태로 토크를 구현 하고 있으나, 사인파의 진폭결정에 많은 어려움이 있다. 본 연구에서는 해석을 통하여 구동토크 및 코 깅토크 그리고 역기전력(BEMF : Back Electro Motive Force)을 구할 수 있도록 BLDC 모터를 MAXWELL 을 통해 유한요소 모델링 하였다.
전자기 해석시간의 단축을 위하여 4극 6슬롯 축 대칭인 점을 이용 대칭(half)모델을 생성하였다. 이 때, Fig. 7의 A의 점선부와 같이 U상의 고정자치가 끝나는 부분과 회전자의 영구자석 N극의 끝단부를 일치시켜 회전자의 초기위치로 하였다. 이때, 밴드 (band)는 회전자와 고정자의 경계면으로 회전속도 와 제어시간을 고려하여 격자간격을 조정하였다.
Fig. 7 Configuration of BLDC motor
2.2.2 제어기 모델
BLDC 모터의 목표속도를 얻을 수 있도록 목표속 도와 회전자의 속도차 그리고 회전각을 이용하여 전압형 3상 인버터의 On/Off와 PI, PWM 제어기의 출력비를 결정하는 제어기 모델을 구성하였다.
3상 인버터를 구성하는 6개 IGBT(Insulated Gate
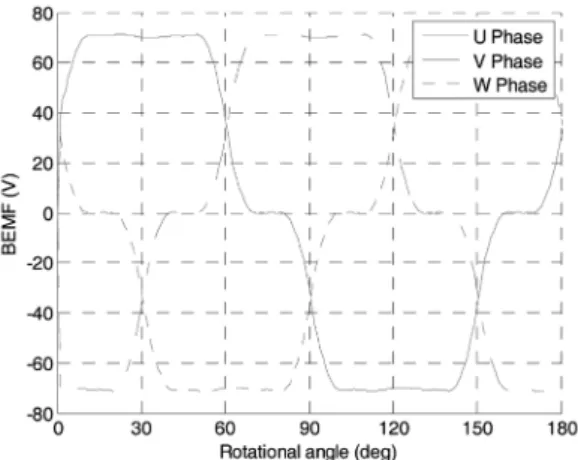
Fig. 8 BEMF wave pattern : 3000RPM
Bipolar Transistor)의 On/Off 주기를 얻기 위하여 무 부하상태에서의 역기전력을 구한다. Fig. 8은 무부 하 3000RPM에서 FEM해석을 통해 구한 역기전력 선도이다. 여기서 U, V, W는 각각 30° 간격으로 교 차하며, 패턴 주기는 180°이고 각각의 상은 60°의 On 주기를 갖는 것을 알 수 있다. 6개 IGBT간 지연 각을 고려하여 IGBT가 On/Off 되도록 SIMPLORER 를 통해 6개 IGBT로 구성된 전압형 3상 인버터를 모 델링하였다.
PWM 전력제어 시뮬레이션을 수행하기 위해 삼 각파의 주기를 해석간격의 10%로 하였으며, 삼각파 의 값과 PWM 출력비의 대소관계에 따라 IGBT가 On, Off 되도록 하였다.
2.3 연동해석 시스템
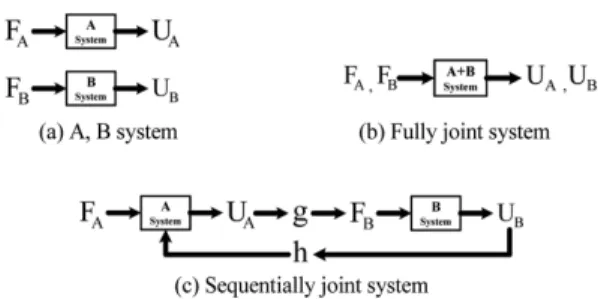
연동해석 시스템을 구성하는 방법은 완전 연동과 순차적 연동으로 구별할 수 있다. Fig. 9(a)는 입력 F 에 대한 출력 U를 갖는 서로 다른 시스템 A, B에 대 한 연동해석을 나타낸 것이다. 먼저 Fig. 9(b)는 두 시스템이 완전 연성되어 각각의 입력에 대해 단일 해석으로 출력을 구하는 완전 연동 해석 시스템을 나타낸 것이다. Fig. 9(c)는 순차적 연동 해석 시스템 을 나타낸 것으로, 연동인자 g, h를 정의하거나, 계 산하여 각 시스템에 대한 해석을 수행한다. 이때, 피 드백 연동인자 h의 영향을 무시할 수 있는 경우 g만 을 고려한 것을 순차적 약 연동 해석이라 한다.
본 연구에서는 순차적 연동 해석을 수행할 수 있 는 시스템을 Fig. 10과 같이 구성하였다. 이때, 순차
유연체 동역학 모델과 전력전자 회로의 연동해석을 통한 단기통 왕복 압축기 거동해석에 관한 연구
Fig. 10 Flow chart and interface of joint simulation for compressor Fig. 9 Joint simulation system
적 연동해석을 제어하기 위해서는 각 시스템의 해 석기의 특성을 고려하여 해석 간격을 고려하여야 한다. 본 연구에서는 전자기 모델의 PWM모델을 고 려하여 해석 간격을 정의하였다.
연동해석은 초기값 블록에서 회전각, 회전속도 를 피스톤의 반력 계산 블록과 인버터블록, PI, PWM 제어기 블록에 전달하는 것으로 시작된다. 인 버터 블록은 회전각에 따라 3상(U, V, W)의 On/Off 값을 결정하고 PI, PWM 제어기는 회전속도와 목표 속도의 차에 따라 구동전압을 결정하여 BLDC모터 유한요소 블록에 전달되도록 하였다. 그리고 BLDC 모터 유한요소 블록은 3상(U, V, W)의 On/Off 값, 구 동전압을 이용하여 구동토크를 산출하게 된다. 산 출된 구동토크는 압축기 동역학 모델 블록의 회전 자 CG에 전달된다. 동시에, 피스톤 반력도 피스톤 CG에 전달된다. 마지막으로 압축기 동역학 모델 블 록에서는 구동토크와 피스톤반력에 따른 회전자의 회전각, 회전속도를 초기값 블록에 전달하여 회전 각, 회전속도를 갱신하도록 연동해석 시스템을 Fig. 8 과 같은 순차적 연동 해석 시스템을 구성하였다. 여 기서 피스톤 반력을 계산하는 연동 해석은 피드백
인자의 영향을 무시할 수 있으므로 순차적 약 연동 이다.
연동해석 시스템은 서로다른 시스템간 데이터 호 환 및 전송 그리고 연동해석 제어가 가능한 통합환 경 구축하여야 한다. 본 연구에서는 SIMULINK에 서 제공되는 사용자정의 함수인 s-function8)과 Virtual.Lab, SIMPLORER에서 SIMULINK 인터페이 스를 위한 dll(Dynamic Link Library)함수를 구성하 여 압축기 연동해석 시스템을 구축하였다.
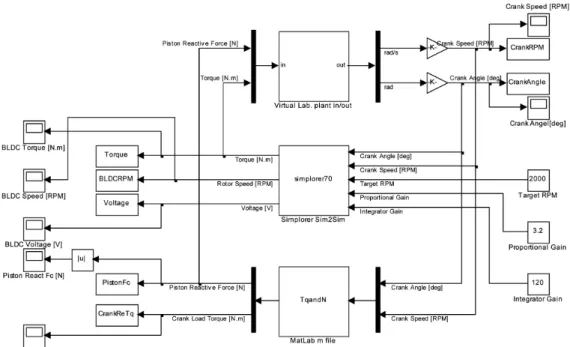
연동해석을 수행하기 위하여 압축기 모델을 3개 의 함수로 정의하였다. 먼저, 유연체 동역학 모델 (Virtual.Lab plant in/out), 전자기 모델(Simplorer Sim2Sim), 피스톤 반력 모델(Matlab M file)을 각각 독립된 함수로 정의하고 각 함수간 데이터 입출력 을 정의 하였다. 여기서 모터, PI, PWM모델을 1개의 전가기 함수로 통합하였다. 함수간 입출력과 데이 터의 흐름을 정의하고, 해석 순서를 정의하여 Fig.
11과 같이 SIMULINK 통합 환경에서, 동역학 모델 과 전자기 모델을 블록화 하여 순차적으로 연동 해 석할 수 있는 압축기 모델을 구현하였다.
Fig. 9에서 3개의 블록은 다중입출력(Multi-Input Multi-Output)블록이다. 동역학 모델 블록은 크랭크 축의 구동을 위한 토크, 그리고 크랭크 축의 회전속 도와 회전각에 상응하는 피스톤의 반력을 입력받아 크랭크 축의 회전속도와 회전각을 출력하게 된다.
출력된 크랭크축의 회전속도와 회전각은 동시에 전 자기 모델 블록, 피스톤 반력블록에 입력된다. 피스 톤 반력 블록은 동역학 모델 블록의 출력 회전속도 와 회전각에 상응하는 피스톤의 반력을 출력한다.
전자기 모델 블록은 동역학 모델 블록의 출력 회전
Won-Suk Sung․Won-Gul Hwang
Fig. 11 Joint simulation control with SIMULINK
속도와 회전각을 입력받아 구동전압과 구동토크를 산출하게 된다. 산출된 피스톤 반력과 구동토크는 동시에 동역학 모델 블록에 입력되게 된다.
3. 연동해석
연동해석을 통해 과도 및 안정 구간에서 압축기 운동특성인 크랭크 축의 회전속도, 구동토크, 구동 전압 그리고, 피스톤 반력의 변화를 고찰하였다. 이 때, 해석조건은 목표속도 2000RPM, PWM 주기 1kHz, 해석간격 10kHz이다.
3.1 운동특성
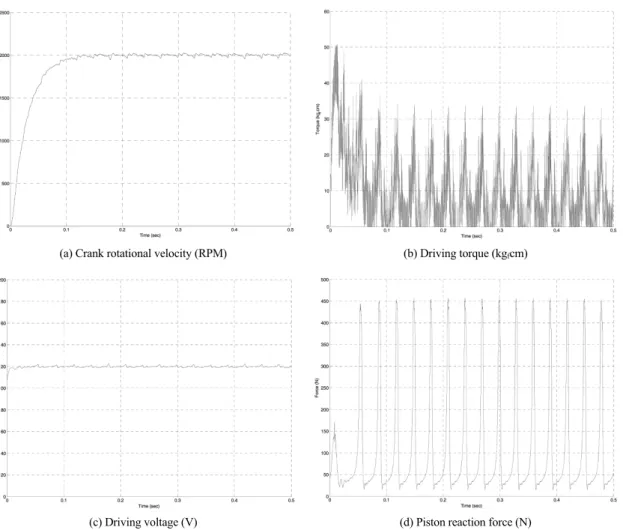
해석결과를 Fig. 12에 나타내었다. 크랭크 축의 회전속도를 나타낸 Fig. 12(a)에서 크랭크 축은 피스 톤 3회 압축후 즉, 0.1sec에 목표속도 2000RPM에 도 달하였으며, 안정구간에서 진폭은 ±10RPM을 나타 내었다. 또한 Fig. 12(b)는 PWM제어에 따른 단속토 크를 나타낸 것으로, 과도구간에서 높은 토크를 보 이다 0.1sec이후 안정된 구간에서 5.5kgf-cm를 나타 내며, Fig. 5의 실린더 내부압력에 비례함을 알 수 있 다. 단속토크의 주파수는 1kHz로 PWM제어에 따른
케리어 주파수를 갖는 것을 알 수 있다. 그리고 구동 전압을 나타낸 12(c)는 PI, PWM제어된 전압의 절대 값을 연속적으로 나타낸 것으로 0.02sec에서 약 120V의 전압을 나타내었다. 마지막으로 Fig. 12(d) 는 피스톤에 작용한 반력을 나타낸 것으로 목표속 도에 도달한 0.1sec이후 안정구간에서 0.1sec에 약 4 주기의 반력을 나타내고 있다.
모터다이나모를 통해 구동전압을 측정 결과를 Fig. 13에 나타내었다. 시뮬레이션 수행 결과 Fig. 12 c)와 차이가 나는 것은 코일의 권선간 간격을 고려 하지 않아 발생된 오차인 것으로 판단된다. 또한 영 구자석의 자속밀도와 규속강판의 적층간격 그리고 철손등의 영향을 받은 것으로 판단된다.
3.2 프레임의 진동
실험결과 가속도의 경우 +X, -Z축방향으로 편중 된 경향을 나타내었으나, Y축은 일정폭으로 진동하 였다. Fig. 14에서 2000RPM운전시 프레임 진동수는 1.3~1.6kHz 대역을 갖는 것을 알 수 있다. 다만, 1kHz 이하 대역에서는 Y축 방향의 크기가 X, Z축에 비해 상대적으로 작게 나타나는 특징을 보였다. 그리고, 1kHz의 케리어 주파수를 확인 할 수 있었다.
A Study on Dynamic Behaviour of Single Cylinder Reciprocating Compressor by Joint Simulation of Flexible Multi-body Dynamics and Electromagnetic Circuit
(a) Crank rotational velocity (RPM) (b) Driving torque (kgfcm)
(c) Driving voltage (V) (d) Piston reaction force (N)
Fig. 12 Driving characteristics of multi-physics system compressor model
(a) 1900 RPM (118V) (b) 2100 RPM (136V)
Fig. 13 Direct current voltage : Experiment
성원석․황원걸
(a) X Direction (b) Y Direction
Fig. 14 Frequency spectrum of frame (2000RPM) : Experiment
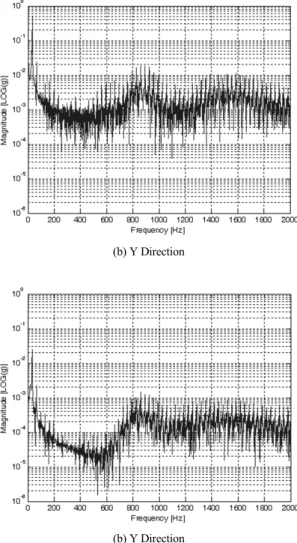
(a) X Direction (b) Y Direction
Fig. 15 Frequency spectrum of frame (2000RPM) : Simulation
시뮬레이션 결과인 Fig. 15(a)를 살펴보면 1.4~
1.6kHz대역에서 피크를 형성하고, Y축 방향은 700~900Hz 대역에서 피크가 형성되었다. 반면 Z축 방향은 200Hz이하에서 피크를 보였다. 따라서 전후 좌우방향의 운동은 고주파성분이 주이며, 상하운동 은 저주파가 주인 것으로 판단된다.
실험과 시뮬레이션 결과 피스톤 운동방향인 X축 방향의 가속도의 비교에서 유사한 결과를 얻을 수 있었으며, 주파수의 비교에서 1.4~1.6kHz 대역의 피 크를 확인 할 수 있었다. 또한 Y축 방향의 가속도의 비교에서 유사한 결과를 얻을 수 있었으며, 주파수 의 비교에서 저주파 대역을 확인할 수 없었으나, 고 주파 영역인 1.3~1.5kHz 대역의 피크를 확인할 수
있었다. 이상의 결과로 본 연구에서 구현한 유연체 동역학 모델을 이용한 연동해석 압축기 모델은 어 느정도 타당한 것으로 판단된다.
3.3 스프링이 동특성에 미치는 영향
압축기 프레임을 지지하고 있는 스프링의 영향을 검토하기 위하여, 스프링 탄성계수 변화에 따른 프 레임의 질량중심 변위를 고찰한 결과 탄성계수를 70%로 줄인 경우 프레임 질량중심의 X축 방향 변위 는 0.5mm감소하고 Y축 방향 변위는 0.03mm 증가하 였다. 그러나, Z축 방향 변화가 미소한 것은 운전중 상하방향의 운동을 스프링이 충분히 구속하고 있음 을 뜻한다. Y축방향의 변화는 회전자와 크랭크 축
A Study on Dynamic Behaviour of Single Cylinder Reciprocating Compressor by Joint Simulation of Flexible Multi-body Dynamics and Electromagnetic Circuit
의 회전운동에 기인한 것으로 판단되며, X축 방향 의 변화가 Y축 방향에 비해 미약한 것은 회전자와 크랭크 축의 회전운동에 X축에 평행하게 운동하는 피스톤 운동이 더해진 것에 따른 것으로 판단된다.
3.4 LDT가 프레임의 동특성에 미치는 영향 LDT의 영향을 고찰하기 위하여 LDT가 있는 경 우와 없는 경우에 대해 각각 연동해석을 수행하고 비교고찰하였다. Fig. 16은 프레임 CG를 원점으로 한 XY평면에 LDT의 유무에 따른 프레임 CG의 궤 적을 나타낸 것이다.
Fig. 16(a)은 LDT가 있는 경우로서 장축1.25mm, 단축 1.15mm의 X축이 긴타원 궤적을 나타내었으 며, Fig. 16(b)는 LDT가 있는 경우로 장축1.45mm, 단 축 1.25mm의 X축이 긴타원의 궤적을 나타내었다.
이는 피스톤의 X축 왕복운동에 따른 결과로 판단된 다. 초기기동시 프레임의 CG점은 2사분면으로 급 격히 이동하여, 일정한 궤적을 그리게 되는데, LDT 가 있는 경우가 없는 경우에 비해 짧은 시간에 수렴 하여 일정한 궤적을 그리는 특성을 보였다. LDT에 의해 프레임의 궤적은 X, Y축방향의 진폭이 감소되 며, 빠른 시간에 안정된 궤적운동을 할 수 있도록 하 는 것을 알 수 있다.
(a) With LDT (b) Without LDT Fig. 16 Displacement of frame CG
4. 결 론
가전기기에 널리 쓰이고 있는 압축기와 같은 다 중물리 시스템의 해석은 동역학해석과 전자기해석 을 별개로 수행하는 것이 통상적이었다. 본 연구에
서는 동역학모델과 전자기모델을 연동시켜 해석할 수 있는 방법을 구현하였다. 먼저 압축기의 크랭크 축, 커넥팅 로드, 피스톤 및 프레임을 지지하는 4개 의 스프링 그리고 LDT 등을 포함한 유연체 동역학 모델을 Virtual.Lab를 통하여 수립하였다. 그리고 모 터모델과 제어기 모델을 수립하고 각각 MAXWELL 과 SIMPLORER를 통해 구현하였다. 마지막으로 동 역학 모델과 전자기 모델을 연동해석할 수 있는 통 합환경을 SIMULINK를 통해 구축하였다.
프레임의 동특성에 대한 연동해석 결과와 실험치 를 비교 분석한 결과 프레임의 거동은 저주파 영역 에서 상하방향의 운동이 주가 되며, 고주파 영역에 는 전후좌우 방향의 운동이 주가 됨을 파악하였다.
이때, PWM제어에 의한 케리어 주파수가 발생됨을 확인하였다. 또한, 프레임의 상하진폭은 스프링의 유효길이에 비해 미소하여 소선간 접촉은 발생되지 않았으며, 운전중 선형스프링의 특성을 보였다.
BLDC 모터의 구동토크를 고찰한 결과 PI제어와 PWM제어를 통해 크랭크 회전속도의 진폭을 줄일 수 있다. 단, PWM제어 주파수의 특성인 케리어 주 파수가 회전토크에 반영되어 진동성분으로 발생하 였다. 따라서 적절한 PWM제어 주파수를 선정한다 면, 소음저감에 효과적일 것으로 판단된다.
이상의 결과로 미루어 볼 때, 본 연구에서 제시한 과정에 의하여 동역학 모델과 전력전자 회로를 연 동시킨 시뮬레이션을 통하여 효율적으로 특성평가 가 가능할 것으로 판단된다. 다중물리시스템의 연 동해석 시스템의 효율성을 높이는 방법은 연구하여 야 할 과제로 남아 있다.
References
1) R. Dufor, J. Der Hagopian and M. Lalanne,
“Transient and Steady State Dynamic Behavior of Single Cylinder Compressors : Prediction and Experimaents,” Journal of Sound and Vibration, Vol.181, No.1, pp.23-41, 1995.
2) N. Levecquea, J. Mahfouda, D. Violetteb, G.
Ferrarisa and R. Dufoura, “Vibration Reduction of a Single Cylinder Reciprocating Compressor based on Multi-stage Balancing,” Mechanism and Machine Theory, Vol.46, Issue 1, pp.1-9,
Won-Suk Sung․Won-Gul Hwang
2011.
3) H. D.-Ray, Y. T.-Fa, S.-J. W.-J. Wang and C.-M. Zhou, “Cogging Torque Reduction of a Single-phase Brushless DC Motor,” IEEE Trans. Magnetics, Vol.34, No.4, pp.4095-4097, 1998.
4) J. Y. Hung and Z. Ding, “Design of Currents to Reduce Torque Ripple in Brushless Permanent Magnet Motors,” IEE PROC. B, Vol.140, No.4,
pp.260-266, 1993.
5) SIMULINK, Dynamic System Simulation for MATLAB, Revised for Simulink 4 (release 12), The MATH WORKS Inc., Messachusetts, 2000.
6) Motion Overview, LMS Virtual Lab., Belgium, 2005.
7) Getting Started : Introduction to Modeling with SIMPLORER, Ansoft Corporation, 2003.