http://dx.doi.org/10.12673/jant.2014.18.4.278
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 15 July 2014; Revised 21 August 2014 Accepted (Publication) 18 August 2014(30 August 2014)
*Corresponding Author; Sangbang Choi
Tel: +82-32-860-7417 E-mail: [email protected]
항공 교통 상황 종합 현시 기능을 갖는 ADS-B 모니터링 시스템 설계 및 구현
A Design and Implementation of an ADS-B Monitoring System Capable of Displaying Air Traffic Situation
송 인 성 · 장 은 미 · 윤 완 오 · 최 상 방*
인하대학교 전자공학과
Inseong Song · Eunmee Jang · Wanoh Yoon · Sangbang Choi*
Department of Electronic Engineering, Inha University, Incheon 402-751, Korea
[요 약]
ADS-B는 지속적으로 증가하는 항공 수요에 대응하기 위해 새롭게 개발된 항공 감시 기술로 레이더에 비해 높은 정확도와 빠른 갱신 주기를 제공하여 레이더를 대체하거나 보완할 수 있을 것으로 주목받고 있다. 하지만 지상 시스템과 항공기 간의 정보 교환 에 무선 데이터링크를 사용하며 지상 시스템 내부의 정보 교환에 무결성이 보장되지 않는 프로토콜을 사용하기 때문에 ADS-B 시 스템의 운용 상태를 감시할 수 있는 시스템이 반드시 필요하다. 본 논문에서는 ADS-B 시스템의 운용 상태 감시 기능과 더불어 ADS-B 감시 자료, 레이더 감시 자료, 비행 정보를 활용하여 항공 교통 상황을 종합적으로 현시할 수 있는 항공 교통 상황 종합 현 시 기능을 갖는 ADS-B 모니터링 시스템을 설계하고 구현하였다. 구현한 시스템은 직접 구성한 ADS-B 지상 시스템과 연결하여 비행중인 항공기의 ADS-B 감시 자료와 레이더 감시 자료, 가상의 비행 정보를 수신한 뒤 현시하는 방법을 통하여 검증하였다.
[Abstract]
ADS-B is a newly developed air surveillance technology to address the consistently increasing air traffic needs. ADS-B attracts attention for replacing or complementing a conventional radar since ADS-B can provide more accurate position information with a shorter interval when compared to the radar. However, as ADS-B uses wireless data links on exchanging information between an aircraft and a ground ADS-B system, and uses protocols without integrity support on exchanging information within the ground ADS-B system, a system which can monitor the operational status of an ADS-B system is essential. In this work, we design and implement an ADS-B monitoring system capable of displaying air traffic situation that can show the comprehensive air traffic situation while monitoring the operational status of the ADS-B system. The implemented ADS-B monitoring system has been verified with a configured ADS-B ground system by displaying ADS-B surveillance data, radar surveillance data, and flight information after receiving live surveillance data of in flight aircrafts, and virtual flight information data.
Key word : ADS-B, TIS-B, ASTERIX, CNS/ATM, Surveillance.
Ⅰ. 서 론
2003년 이후 세계 항공기 시장은 연 평균 7.5%의 지속적인 성장을 이어왔으며, 세계 항공 수요는 2011년부터 2015년까지 연 평균 5.0%의 성장을 기록할 것으로 예측된다. 국내의 경우 2013년 3분기의 항공 교통량이 2012년 3분기 대비 평균 8.6%
증가했으며, 인천 관제탑과 서울 접근 관제소가 각각 일일 교통 량 860대, 1460대를 기록하여 연중 관제시설 일일 교통량 최대 치를 경신하였다[1]-[2]. 이와 같이 지속적으로 증가하는 항공 수요를 수용하기 위해서 항공기의 출발부터 도착까지를 관리 하는 항공 교통 업무뿐만 아니라, 공역 관리, 항공 교통 흐름 관 리 등을 아우르는 항공 교통 관리 기술의 발전과 효율적인 운영 이 그 어느 때보다 더욱 강조되고 있다. 이에 따라 미국, 유럽 등 의 항공 기술 선진국들은 지속적으로 증가하는 항공 수요에 발 맞추어 효율적이고 안전한 항공 교통 관리 기술 개발에 지속적 인 투자를 하고 있다. 그 일환으로 국제 민간 항공 기구 (ICAO;
international civil aviation organization)에서는 FANS (future air navigation system)을 담당하는 위원회를 설립하여 새로운 개념 의 항행시스템인 CNS/ATM (communication navigation surveillance / air traffic management)를 연구해왔다. CNS/ATM 은 통신, 항법, 감시를 위한 새로운 기술과 항공 교통 관리를 위 한 새로운 개념과 방법을 제시하고 있다. CNS/ATM은 항공 교 통 관리 분야의 경제성, 효율성, 안전성을 획기적으로 향상시킬 것으로 주목받고 있으며, 국내에서도 국토교통부를 중심으로 정부 산하 연구기관, 기업체, 대학교 등에서 활발하게 연구를 진행하고 있다.
ADS-B (automatic dependent surveillance - broadcast) 시스템 은 CNS/ATM에서 제시하는 새로운 감시 기술로 CNS/ATM을 구성하는 핵심 기술이다. ADS-B 시스템은 항공 수요가 지속적 으로 증가함에 따라 기존 항공 감시 기술인 레이더 시스템이 포 화 상태에 이르러 효율성과 안정성이 떨어질 것으로 예측됨에 따라 레이더 시스템을 보완, 대체하기 위해 개발되었다. ADS-B 송신기를 탑재한 타겟은 위성항법시스템 (GNSS; global navigation satellite system)을 이용하여 자신의 위치를 확인한 후 무선 데이터 링크를 통해 자신의 위치를 지속적으로 방송하 며, ADS-B 수신기를 탑재한 타겟은 신호를 수신하여 해당 신 호를 방송중인 타겟의 위치를 확인한다. ADS-B 시스템은 레이 더 시스템에 비해 최소 5배 이상 빠른 갱신 주기와 최소 6배 이 상의 위치 정확도를 갖는다. 미국과 유럽은 각각 NextGen (next generation), SESAR (single european sky ATM research) 계획을 통해 ADS-B 시스템을 도입하여 현재 활용하고 있으며, 2020년 까지 모든 항공기가 ADS-B 시스템을 이용하도록 할 계획을 세 우고 있다[3]. 우리나라 역시 2008년 인천국제공항을 시작으로 ADS-B 시스템을 도입하였고 2020년까지 항로 및 주요 공항에 ADS-B 시스템을 구축할 예정이다.
ADS-B 시스템이 레이더 시스템에 비해 5배 이상의 갱신 주 기와 6배 이상의 위치 정확도를 갖지만, GNSS를 이용하기 때
문에 GNSS의 오차 특성에 따른 위치 측정 오차가 발생할 수 있 으며, 무선 데이터 링크를 이용하기 때문에 무선 데이터 링크에 서의 데이터 손상이 발생할 수 있다. 또한 ADS-B 무선 데이터 링크의 전파를 수신하는 ADS-B 지상 시스템의 데이터 수신, 디코딩, 인코딩 과정에서도 오류가 발생할 수 있다. 따라서 ADS-B 송신기의 위치 측정에서부터 무선 전송, ADS-B 수신기 의 수신 및 데이터 변환 과정이 원활하게 동작하는 것을 확인하 기 위한 ADS-B 모니터링 시스템이 반드시 필요하다.
본 논문에서는 ADS-B 시스템의 운용 상태 감시 기능과 더불 어 항공 교통 상황 감시 기능을 제공하는 항공 교통 상황 종합 감시용 ADS-B 모니터링 시스템을 설계하고 구현하였다. 항공 교통 상황 종합 감시용 ADS-B 모니터링 시스템을 설계하는 과 정에서 RTCA (radio technical commission for aeronautics)가 정 의하는 ADS-B 시스템 관련 표준 문서인 DO-242A, DO-260B, DO-282A, DO-289 등을 검토함과 동시에 항공 교통 관리 시스 템 사용자의 요구사항을 함께 반영하였다[4]-[7]. 이를 바탕으 로 인터페이스부, 타겟 관리부, 화면 관리부 등으로 구성된 시 스템을 구현한 뒤, 모의 데이터를 수신하는 실험과 실제 항공기 의 데이터를 수신하는 실험을 통하여 항공 교통 상황 종합 감시 용 ADS-B 모니터링 시스템의 성능을 점검하였다.
본 논문은 다음과 같이 구성된다. 2장에서는 ADS-B 모니터 링 시스템과 관련된 기술들에 대해, 3장에서는 본 논문에서 설 계한 ADS-B 모니터링 시스템의 구성에 대해 설명하며, 4장에 서는 본 논문에서 설계한 ADS-B 모니터링 시스템의 구현 결과 를 보이고, 마지막으로 5장에서는 본 논문에서 설계한 ADS-B 모니터링 시스템의 활용 방안 및 결론을 도출한다.
Ⅱ. 관련 연구 2-1 ADS-B
ADS-B 시스템은 기존 항공 감시 기술인 레이더를 보완, 대 체하기 위해 개발된 새로운 감시 기술로 효율적인 공역 활용, 저시정 상태 제약 감소, 지상 감시 기능 강화, 혼잡 제어 시의 안 정성 강화 등을 목표로 개발되었다. ADS-B는 automatic dependent surveillance – broadcast의 약자로 automatic은 사람이 조작하지 않아도 자동으로 감시 자료를 전달한다는 의미를 담 고 있다. dependent surveillance는 감시 자료를 송신하는 타겟의 측정 장비들을 사용하여 생성한 감시 자료이기 때문에 타겟에 의존하는 감시 자료라는 의미를, broadcast는 감시 자료를 무선 으로 방송한다는 의미를 담고 있다[4].
ADS-B 메시지는 타겟의 위치, 고도, 속도, 방향 등 타겟의 움직임에 관련된 정보와, 타겟의 고유 ID, 타겟이 탑재한 센서 의 정확도, 센서의 동작 상태, 위급 상황 정보 등 타겟의 상태에 관련된 정보를 포함한다. ADS-B 시스템의 핵심 기술은 위성항 법시스템으로, ADS-B 시스템을 이용하는 타겟은 GNSS를 이 용하여 자신의 위치, 고도, 속도, 방향 등을 확인한다. GNSS를
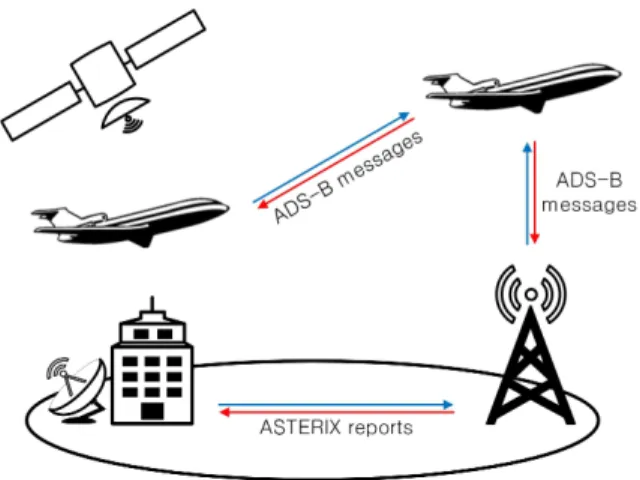
그림 1. ADS-B 시스템 개념도
Fig. 1. A brief lookout of the ADS-B system.
이용한 위치 확인이 불가능하거나 추가 정보가 필요한 경우 타 겟이 탑재한 관성 항법 시스템, 기압 고도, 대기 속도, 자기 방위 센서 등을 이용하여 위치를 측정하기도 한다. 생성한 ADS-B 메시지는 일정한 주기로 1090ES (1090 extended squitter), UAT (universal access transceiver), VDL mode 4 (very high frequency data link mode 4) 등 ADS-B 무선 데이터 링크를 통하여 방송한 다. 예를 들어, 타겟의 움직임에 관련된 중요한 정보인 위치 정 보 등은 0.5초의 주기로 방송하며, 타겟의 상태에 관련된 덜 중 요한 정보인 항공기 호출명 등은 5초의 주기로 방송한다.
ADS-B 수신기를 장착한 타겟과 지상의 항공 교통 관리 시스템 은 방송 신호를 수신하여 해당 신호를 방송중인 타겟의 위치와 상태 정보를 확인한다. 지상 항공 교통 관리 시스템 중 ADS-B 신호를 수신하는 서브시스템을 ADS-B 지상 장비 (ADS-B ground station)이라고 부른다. 그림 1은 ADS-B 시스템의 개념 을 간략히 보여주는 그림이다. 그림에서 항공기들은 ADS-B 방 송 신호를 통해 서로를 인식하며, 지상장비는 ADS-B 방송 신 호를 수신하여 ADS-B 지상 시스템에서 사용하는 메시지 형식 으로 변환한 뒤 항공 교통 관리 시스템으로 전송한다.
ADS-B 시스템의 감시 자료 갱신 주기는 0.5초로, 기존 레이 더 시스템의 갱신 주기인 4초 ~ 15초에 비해 최소 8배 이상 빠 른 갱신 주기를 갖는다. 또한 가장 정밀한 시스템을 기준으로 했을 때 ADS-B 시스템의 위치 오차는 최대 3m로, 최대 오차 20m를 갖는 기존 레이더 시스템에 비해 6배 이상 높은 위치 정 확도를 갖는다. ADS-B 시스템이 기존 레이더 시스템에 비해 빠른 갱신 주기와 높은 위치 정확도를 갖지만, 무선 데이터 링 크를 사용하기 때문에 무선 신호를 수신하지 못하는 경우 해당 타겟의 위치 및 상태 정보를 알 수 없으며, 무선 데이터 링크에 서의 데이터 손상 가능성이 있다는 단점이 있다.
2-2 ASTERIX
ASTERIX (all purpose structured eurocontrol surveillance information exchange)는 Eurocontrol에서 정의하는 항공 교통
관리 시스템 간의 자료 교환 표준 포맷이다.
ASTERIX는 교환하는 자료의 종류와 특성에 따라 카테고리 별로 분류된다. 예를 들어 카테고리 021 (CAT021)은 ADS-B 감 시 자료를 교환하기 위해, 카테고리 062 (CAT062)는 추적 기능 이 포함된 레이더 감시 자료를 교환하기 위해 사용한다. 카테고 리 021, 카테고리 062와 같이 감시 자료를 교환하기 위해 사용 하는 카테고리는 타겟의 위치, 고도, 속도, 방향, 상태 등의 정보 를 포함한다. 또 다른 예로 카테고리 023 (CAT023)은 ADS-B 지상 장비의 운용 상태를 교환하기 위해, 카테고리 247 (CAT247)은 ASTERIX를 사용하는 특정 장비가 현재 사용하는 카테고리와 해당 카테고리의 버전 정보를 교환하기 위해 사용 한다. CAT023, CAT247과 같이 상태 정보를 교환하기 위해 사 용하는 카테고리는 장비의 운영 통계, 현재 상태 등의 정보를 포함한다[8]-[11].
하나의 ASTERIX 메시지는 하나 혹은 그 이상의 레코드로 구성된다. 레코드는 한 타겟 혹은 한 장비에 대한 정보의 집합 체로, 각 정보는 레코드 내의 데이터 아이템으로 표현된다. 데 이터 아이템은 ASTERIX 메시지 내에 반드시 존재해야 하는 필수 데이터 아이템과 필요에 따라 존재하는 선택 데이터 아이 템이 있다. 따라서 ASTERIX 메시지는 상황에 맞는 데이터 아 이템만을 포함하며, 포함하는 데이터 아이템에 대한 정보는 레 코드의 시작 부분에 기록한다. 대부분의 데이터 아이템은 지정 된 길이를 갖지만, 일부 데이터 아이템은 필요에 따라 길이를 확장하여 더 많은 정보를 포함할 수 있도록 구성되어 있다.
ASTERIX는 표준 포맷이므로 같은 ASTERIX 카테고리를 사용하는 시스템 간에는 자료의 공유가 가능하다는 장점이 있 어 대부분의 항공 교통 관리 시스템에서 사용하고 있다. 하지만 ASTERIX 메시지 내 데이터 아이템의 존재가 동적이며, 일부 데이터 아이템은 길이가 동적이기 때문에 메시지를 디코딩하 기 전에는 메시지의 구성에 오류가 있는지 판단할 수 없다. 또 한 ASTERIX 메시지에 포함된 정보에 오류가 있는지 판단할 수 있는 오류 검증 기능을 지원하지 않는다는 단점이 있다.
2-3 CNS/ATM
CNS/ATM은 국제 민간 항공 기구 가 항공 교통량의 폭발적 인 증가를 예측하고 1983년부터 연구해 온 새로운 항행시스템 이다. CNS/ATM은 communication navigation surveillance / air traffic management의 약자로 통신, 항법, 감시, 항공 교통 관리 를 위한 새로운 기술과 방법, 개념을 제시하고 있다. 통신, 항법, 감시 시스템은 안전하고 효율적인 항공 교통 관리의 필수 요소 이므로 이들을 하나로 묶어 CNS/ATM이라고 부른다.
통신 시스템은 항공기와 항공 교통 관리소 간의 음성 및 데 이터 통신을, 항법 시스템은 항공기의 운항을 위한 위치, 방향, 거리 정보 제공을, 감시 시스템은 항공기를 포함하여 항공기의 운항과 연관이 있는 비행체와 지상 물체의 위치 파악을 담당하 는 시스템이다.
CNS/ATM의 통신 시스템은 정확하고 효율적인 정보 전달을
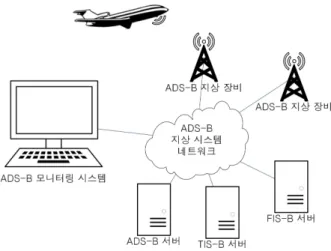
그림 2. ADS-B 지상 시스템 구성의 예
Fig. 2. An ADS-B ground system configuration example.
위해 기존 음성 통신을 데이터 통신으로 대체한 기술을 사용한 다. CNS/ATM에서 사용하는 데이터 링크는 VDL (very high frequency data link), SATCOM (satellite communications), HFDL (high frequency data link) 등이 있으며, VDL과 HDFL 데 이터 링크를 사용하는 통신 어플리케이션으로 관제사와 조종 사가 음성이 아닌 문자를 이용하여 정보를 주고받는 CPDLC (controller pilot data link communications) 등이 있다. 뿐만 아니 라 현재 항공 교통 상황을 방송하여 항공기에 알리는 TIS-B (traffic information service – broadcast), 비행 정보를 방송하여 항공기에 알리는 FIS-B (flight information service – broadcast) 역시 데이터 링크를 사용한 통신 어플리케이션이다. CNS/ATM 의 항법 시스템은 기존 시스템보다 더 정확한 위치와 방향 정보 를 조종사에게 제공하는 것을 목표로 하며, 이를 위해 SBAS (satellite based augmentation system), GBAS (ground based augmentation system) 등 위성항법시스템의 오차를 보정하는 별도의 신호가 추가된 위성항법보강시스템을 사용한다. 따라 서 항공기 간의 분리 간격 최소화와 접근 및 착륙 절차 개선이 가능하며, 기존 시스템에서 불가능했던 추가 항로 개설과 곡선 진입 및 착륙 절차 시행 등이 가능해진다. CNS/ATM의 감시 시 스템은 기존 일차감시레이더 (PSR; primary surveillance radar), 이차감시레이더 (SSR; secondary surveillance radar) 등 레이더 시스템에서 벗어나 위성항법시스템을 이용하는 ADS-B 시스 템을 감시 시스템의 핵심 기술로 사용한다. ADS-B 시스템은 레이더에 비해 위치 정확도가 높으며 감시 자료의 갱신 주기가 짧기 때문에 관제사의 감시 능력을 향상시킬 수 있을 뿐만 아니 라, ADS-B 송수신기를 장착한 항공기 간에는 감시 자료의 공 유가 가능하기 때문에 조종사의 주변 상황 인식 능력을 향상시 킬 수 있다[12].
Ⅲ. ADS-B 모니터링 시스템 설계 3-1 ADS-B 지상 시스템
ADS-B 지상 시스템은 ADS-B 무선 신호를 수신하여 ASTERIX 메시지 등 감시 자료 공유가 가능한 포맷으로 변환 한 뒤 변환한 감시 자료를 항공 교통 관리 시스템에 제공하는 시스템이다. 더욱 확장된 의미에서 살펴보면, 레이더 감시 자료 를 이용하여 항공 교통 상황을 방송하는 서비스인 TIS-B와 비 행 정보를 방송하는 서비스인 FIS-B 신호를 송출하는 시스템까 지 ADS-B 지상 시스템에 포함될 수 있다.
본 논문에서 설계한 항공 교통 상황 종합 감시용 ADS-B 모 니터링 시스템은 다음과 같은 환경을 가정한다. 우선, ADS-B 신호를 수신하는 ADS-B 지상 장비와 TIS-B 신호와 FIS-B 신호 를 송신하는 TIS-B 지상 장비가 있다. 지상 장비들은 자료를 비 교, 저장, 분배하기 위한 ADS-B 서버, TIS-B 서버, FIS-B 서버 와 연결된다. ADS-B 서버, TIS-B 서버, FIS-B 서버는 자료의 비 교와 분배를 담당하므로 ADS-B 지상 시스템 내에서 송수신되
는 모든 자료는 적어도 하나 이상의 서버를 거치게 되어있다.
마지막으로 본 논문에서 제안하는 ADS-B 모니터링 시스템은 ADS-B 지상 시스템 내에서 송수신하는 자료를 모두 확인할 수 있도록 ADS-B 서버, TIS-B 서버, FIS-B 서버와 연결되어 서버 가 송수신하는 자료를 전달받는다. 그림 2는 본 논문에서 제안 하는 ADS-B 모니터링 시스템이 운용되는 환경을 그림으로 나 타낸 것이다. 그림에서 볼 수 있듯이, ADS-B 모니터링 시스템 은 ADS-B 지상 시스템 네트워크를 통하여 ADS-B 서버, TIS-B 서버, FIS-B 서버, ADS-B 지상장비들과 연결되어있으며, 해당 네트워크를 통하여 자료를 전달받는다.
3-2 ADS-B 모니터링 시스템 설계
본 논문에서는 ADS-B 감시 자료와 함께 레이더 감시 자료, 비행 정보를 사용하여 ADS-B 시스템의 운용 상태 감시 기능을 제공함과 동시에 항공 교통 상황 감시 기능을 제공하는 항공 교 통 상황 종합 감시용 ADS-B 모니터링 시스템을 설계하고 구현 하였다.
ADS-B 모니터링 시스템은 항공 교통 상황 종합 감시의 목적 에 부합하도록 ADS-B 타겟, 레이더 타겟(TIS-B 타겟), 비행 정 보를 동시에 사용자에게 전달할 수 있도록 설계되었다. ADS-B 타겟과 레이더 타겟은 타겟을 의미하는 도형(심볼), 타겟의 이 동 방향과 예상 진행 위치를 나타내는 직선(헤딩 벡터), 그리고 타겟의 고도, 속도, ID를 나타내는 글상자(데이터 블록)의 집합 으로 화면상에 나타난다. 비행 정보는 수신한 전문의 내용이 문 자로 화면 상에 나타난다. ADS-B 타겟 현시에는 CAT021 ADS-B 감시 자료가, 레이더 타겟 현시에는 CAT062 레이더 감 시 자료가, 비행 정보 현시에는 전문 형식의 FIS-B product가 사 용된다. CAT021의 경우 다양한 시스템과의 연동을 위해 현재 다수의 항공 교통 관리 시스템에서 사용 중인 버전 0.23, 버전 1.3, 버전 2.1 등 세 가지 버전을 동시에 지원하도록 설계하였다.
따라서 ADS-B 지상 장비가 사용 중인 CAT021의 버전 확인을
데이터 아이템 번호 설명
I021/008 Aircraft Operational Status I021/010 Data Source Identifier
⋮ ⋮
I021/080 Target Address
I021/090 Quality Indicators
⋮ ⋮
I021/130 Position in WGS84 Coordinates
⋮ ⋮
I021/145 Flight Level
⋮ ⋮
I021/160 Airborne Ground Vector
⋮ ⋮
I021/170 Target Identification
I021/200 Target Status
⋮ ⋮
I021/400 Receiver ID
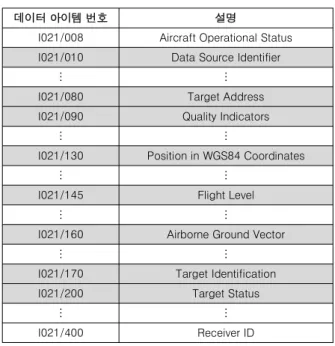
표 2. ADS-B 감시 자료 ASTERIX CAT021 버전 2.1의 구조 Table 2. A structure of the ADS-B surveillance data
ASTERIX CAT021 verson 2.1.
데이터 아이템 번호 설명
I062/010 Data Source Identifier
⋮ ⋮
I062/040 Track Number
I062/060 Track Mode 3/A Code
⋮ ⋮
I062/105 Calculated Track Position (WGS84)
⋮ ⋮
I062/135 Calculated Track Barometric Altitude
⋮ ⋮
I062/185 Calculated Track Velocity (Cartesian)
⋮ ⋮
I062/245 Target Identification
⋮ ⋮
I062/380 Aircraft Derived Data
⋮ ⋮
I062/510 Composed Track Number 표 3. 레이더 감시 자료 ASTERIX CAT062의 구조 Table 3. A structure of the radar surveillance data
ASTERIX CAT062.
위해 CAT247을 함께 사용한다.
표 2은 ADS-B 감시 자료인 CAT021 중 가장 최신 버전인 버 전 2.1의 구조를 간략하게 나타낸 것이며, 음영으로 표시된 데 이터 아이템은 ADS-B 모니터링 시스템이 타겟의 정보 분석을 위해 사용하는 핵심 데이터 아이템이다. ADS-B 모니터링 시스 템은 ADS-B 타겟에 대한 정보를 제공하기 위해 데이터 아이템 010, 080, 090, 130, 145, 160, 170, 200 등을 사용한다. 각 데이터 아이템은 순서대로 지상 장비의 고유 식별 번호, 타겟의 송수신 기 고유 주소, 타겟의 위치 정확도, 타겟의 위치, 타겟의 고도, 타겟의 속도와 방향, 타겟의 호출명, 타겟의 상태 정보를 의미 한다.
표 2는 레이더 감시 자료인 CAT062의 구조를 간략하게 나 타낸 것이다. ADS-B 모니터링 시스템은 레이더 타겟에 대한 정보를 제공하기 위해 데이터 아이템 010, 040, 060, 105, 135, 185, 245, 380 등을 사용한다. 각 데이터 아이템은 순서대로 레 이더 감시 자료 처리기의 고유 식별 번호, 레이더에서 부여한 타겟의 고유 식별 번호, 타겟의 송수신기에 입력된 타겟 식별 코드, 타겟의 위치, 타겟의 고도, 타겟의 속도와 방향, 타겟의 호 출명, 타겟이 데이터 링크(이차감시레이더 혹은 ADS-B)를 통 해 전달하는 정보를 의미한다.
빠르고 정확한 ADS-B 시스템 운용 상태 감시 기능을 제공하 기 위해, 수신한 감시 자료를 분석한 후 어떠한 가공도 하지 않 고 필요한 값만을 추출하여 타겟을 화면에 현시하도록 설계하 였다. 이는 가공 과정에서 지연이 발생할 수 있고, 가공 과정에 서 감시 자료의 값이 보정되거나 변경되어 사용자가 ADS-B 시 스템의 운용 상태를 정확하게 인지하지 못하는 문제가 발생할 수 있기 때문이다. 또한 감시 자료 종류 별로 타겟을 현시하는
기능, 감시 자료 종류 별로 수신 중인 타겟의 대수를 현시하는 기능, ADS-B 지상 장비 별로 수신 중인 감시 자료를 현시하는 기능과 ADS-B 타겟의 위치 정확도 별로 타겟을 현시하는 기능 을 갖추도록 설계하여 사용자가 ADS-B 시스템의 운용 상태를 정확히 인지할 수 있도록 하였다. 이와 함께 수신 중인 ASTERIX 메시지의 전체 내용을 필드 별로 보여주는 기능을 포함하여 ADS-B 시스템의 운용 상태 인지를 돕도록 설계하였 다.
본 논문에서 설계하고 구현한 ADS-B 모니터링 시스템은 ADS-B 시스템 운용 상태 감시 기능과 더불어 항공 교통 상황 현시 기능을 갖는다. 항공 교통 상황 현시 기능 지원을 위해 ADS-B와 레이더 타겟 표현에 사용하는 심볼과 헤딩 벡터는 사 용자 설정이 가능하도록 설계함과 동시에 타겟이 이동한 궤적 을 표현할 수 있도록 설계하였다. 또한 타겟 간의 고도와 거리 가 사용자 지정 범위 이내로 근접하는 경우 충돌 경고를, 타겟 이 공역 상에 설정된 RA (restricted area), PA (prohibited area), AA (alert area), DA (danger area)에 진입하는 경우 침범 경고를, 감시 자료에 타겟의 위급 상황을 알리는 내용이 포함된 경우 상 태 경고를 출력하는 기능과, 지상 타겟과 공중 타겟을 분리하여 현시하는 기능, 특정 고도 안에 있는 타겟만을 현시하는 기능 등을 포함하도록 설계하였다. 그뿐만 아니라 ADS-B 지상 시스 템의 ADS-B 서버, TIS-B 서버, FIS-B 서버에 저장된 정보를 이 용하여 특정 시점의 감시 자료와 비행 정보를 재생할 수 있도록 설계하여 필요한 경우 사용자가 원하는 시점의 ADS-B 시스템 의 운용 상태와 항공 교통 상황을 재연할 수 있도록 하였다.
ADS-B 모니터링 시스템은 평면 투영을 위한 좌표계로 UTM (universal transverse mercator) 좌표계를 사용한다[13]. UTM 좌
그림 3. ADS-B 모니터링 시스템 소프트웨어의 구성 Fig. 3. An architectural layout of the ADS-B monitoring
system software.
그림 4. ADS-B 모니터링 시스템 소프트웨어 CSCI 구성 Fig. 4. A CSCI architecture of the ADS-B monitoring
system software.
표계는 위성항법시스템, 레이더 시스템이 사용하는 것과 같은 WGS84 (world geodetic system 1984) 타원체를 사용하므로 ADS-B 타겟과 레이더 타겟을 화면상에 투영하기 쉽다는 장점 을 갖고 있다. UTM 좌표계는 지구를 세로로 60개의 격자, 가로 로 20개의 격자로 나누고 각 격자를 동서로 1번부터 60번까지, 남북으로 C부터 X까지 기호를 붙여 구분한다. 본 논문에서 설 계하고 구현한 ADS-B 모니터링 시스템은 UTM 좌표계로 표현 되는 지구의 전역을 표현할 수 있도록 설계되었으며, UTM 좌 표계에서 대한민국이 속하는 51S, 51T, 52S, 52T 지역에 대한 지도를 포함하였다.
ADS-B 모니터링 시스템의 소프트웨어 설계는 MIL-STD- 498 표준을 따라 진행하였다[14]. MIL-STD-498은 미국 국방성 에서 사용하던 표준으로 소프트웨어 개발과 문서화 과정을 정 의하고 있다. MIL-STD-498은 시스템의 요구사항을 분석하고, 컴퓨터 소프트웨어 구성 항목 (CSCI; computer software configuration item)을 설계한 뒤, 시스템의 요구사항을 CSCI에 모두 반영하도록 설계 지침을 제시한다. CSCI는 요구사항을 반 영해 설계한 기능 단위의 CSU (computer software unit)과 비슷 한 기능을 갖는 CSU들의 집합인 CSC (computer software component)로 구성된다. 그림 3은 ADS-B 모니터링 시스템 소 프트웨어의 구성을 보여주며, 그림 4는 MIL-STD-498에 따라 ADS-B 모니터링 시스템 소프트웨어를 CSCI로 분류한 것으로 세 개의 블록은 CSC에, 여덟 개의 유닛은 CSU에 해당한다.
첫 번째 CSC인 인터페이스 블록은 외부 시스템과의 자료 송 수신을 담당하는 블록이다. 인터페이스 블록은 CAT021 및 CAT247 ADS-B 감시 자료, CAT062 레이더 감시 자료, FIS-B Product 비행 정보를 수신하기 위한 자료 수신 유닛과, ADS-B 지상 시스템 내의 서버로 재생 명령 등을 전송하기 위한 명령 송신 유닛으로 구성된다.
두 번째 CSC인 타겟 관리 블록은 수신한 ADS-B 감시 자료 와 레이더 감시 자료에 포함된 타겟의 정보를 읽어내고 전체 타 겟의 정보를 관리하는 블록이다. 타겟 관리 블록은 ASTERIX 분석 유닛, 필터 적용 및 경고 검출 유닛, 타겟 리스트 관리 유닛 으로 구성된다. ASTERIX 분석 유닛은 ASTERIX 분석기를 이 용하여 수신한 CAT021 ADS-B 감시 자료와 CAT062 레이더
감시 자료를 ASTERIX 데이터 아이템 수준으로 분석하고 필요 한 정보를 추출한다. 필터 적용 및 경고 검출 유닛은 ADS-B 타 겟에 위치 정확도 필터, 고도 필터, 지상 타겟 필터, 감시 자료 종류 필터 등과 레이더 타겟에 고도 필터, 지상 타겟 필터, 감시 자료 종류 필터 등을 적용하고, ADS-B 타겟의 상태 경고, 침범 경고, 충돌 경고 등과 레이더 타겟의 침범 경고, 충돌 경고 등을 검출하는 유닛이다. 마지막으로 타겟 리스트 관리 유닛은 ADS-B 모니터링 시스템이 수신하고 현시하고 있는 모든 타겟 의 정보를 관리하는 유닛으로 새로운 타겟의 정보 생성, 기존 타겟의 정보 갱신, 오래 타겟의 정보 삭제 등을 담당하는 유닛 이다.
세 번째 CSC인 화면 관리 블록은 UI (user interface) 메뉴와 항공 교통 상황 현시 화면을 관리하는 블록이다. 화면 관리 블 록은 UI 관리 유닛, 지도 및 아이템 관리 유닛, 현시 화면 관리 유닛으로 구성된다. UI 관리 유닛은 사용자 설정 메뉴와 기능 창의 동작을 관리하는 유닛이다. 지도 및 아이템 관리 유닛은 항공 교통 상황 현시 화면에 나타나는 타겟 심볼, 헤딩 벡터, 데 이터 블록, 지도 아이템 등 화면에 현시할 그래픽 아이템의 생 성, 소멸과 아이템 간의 연동 등을 관리하는 유닛이며, 현시 화 면 관리 유닛은 그래픽 아이템의 위치 정보 관리와 보임/숨김, 갱신을 담당하는 유닛이다.
그림 5는 ADS-B 타겟을 현시하기 위한 ADS-B 감시 자료의 처리 과정을 그림으로 나타낸 것이다. 인터페이스 블록이 ADS-B 감시 자료를 수신하면 우선 해당 감시 자료가 ADS-B 모니터링 시스템에 등록된 지상 장비에서 온 것인지를 확인한 다. 등록되지 않은 지상 장비가 보낸 ASTERIX 메시지라면 ASTERIX 분석 중에 생길 수 있는 문제를 차단하기 위해 해당 감시 자료를 버린다. ADS-B 모니터링 시스템은 지상 장비가 CAT247을 송신하는 경우 해당 지상 장비의 고유 식별 번호와 CAT021의 버전을 등록하도록 구성되어 있다. 등록된 지상 장 비가 보낸 ASTERIX 메시지라면 타겟 관리 블록에서 ASTERIX 분석을 통해 필요한 데이터 아이템 값들을 추출한다.
그 다음, ASTERIX 메시지에 담겨 있는 ADS-B 타겟이 새로운
그림 5. ADS-B 감시 자료 처리 흐름도
Fig. 5. A flowchart representing a process for dealing with the ADS-B surveillance data.
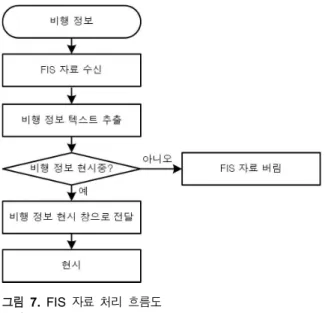
그림 7. FIS 자료 처리 흐름도
그림 7. A flowchart representing a process for dealing with the FIS data.
그림 6. 레이더 감시 자료 처리 흐름도
Fig. 6. A flowchart representing a process for dealing with the radar surveillance data.
타겟인 경우 새로운 타겟의 정보가 타겟 관리 블록과 화면 관리 블록에 등록된다. 새로운 타겟이 아닌 경우 타겟 관리 블록의 기존 타겟 정보를 새로운 정보로 갱신한다. 타겟 관리 블록은 타겟 정보의 등록 혹은 갱신 후 상태, 침범, 충돌 경고 검출을 위 해 순서대로 상태 경고 값 존재 여부와 경고 구역 침범 여부를 확인하고 현재 타겟이 다른 타겟과 충돌 경고 검출 거리 이내로 근접했는지를 계산한다. 경고 검출 후 필터 적용을 위해 순서대 로 감시 자료 종류 필터, 위치 정확도 필터, 고도 필터, 지상 타 겟 필터를 적용한다. 필터의 조건에 해당되어 필터가 적용된 타 겟은 화면상에서 숨겨진다. 타겟 관리 블록에서 경고 검출과 필 터 적용이 끝나면 해당 타겟의 정보 중 화면상에 타겟을 현시하 기 위해 필요한 위치, 고도, 속도, 방향, 경고 상태, 필터 상태 등 의 정보가 화면 관리 블록으로 전달되고 화면 관리 블록은 화면 상의 해당 타겟 정보를 갱신한다.
그림 6은 레이더 타겟을 현시하기 위한 레이더 감시 자료의 처리 과정을 그림으로 나타낸 것이다. 레이더 감시 자료의 처리 과정은 ADS-B 감시 자료의 처리 과정과 동일하지만 지상 장비 검사 과정이 없다. 수신한 감시 자료는 타겟 관리 블록에서 ASTERIX 분석 과정을 거치며, 분석된 ASTERIX 메시지에 담 겨 있는 타겟의 정보가 등록 혹은 갱신된다. 그 후 타겟 관리 블 록은 침범, 충돌 경고 검출을 위한 계산 과정을 진행하며, 감시 자료 종류 필터, 고도 필터, 지상 타겟 필터를 적용한 뒤 현시에 필요한 정보를 화면 관리 블록으로 전달하여 화면상의 타겟 정
보를 갱신한다.
그림 7은 비행 정보를 현시하기 위한 FIS 자료의 처리 과정 을 그림으로 나타낸 것이다. 인터페이스 블록은 FIS 자료를 수 신하면 수신 메시지 내의 비행 정보를 추출하고, 현재 비행 정 보가 현시 중인 경우 화면 관리 블록의 비행 정보 현시 창으로 비행 정보를 전달한다. 그렇지 않은 경우 수신한 비행 정보를 버린다.
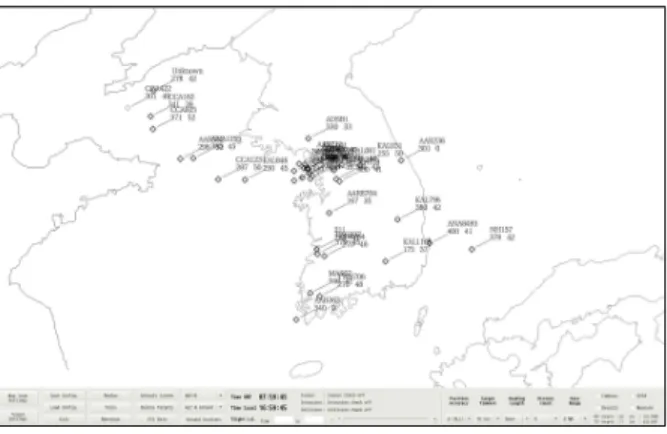
그림 9. ADS-B 감시 자료를 현시하고 있는 화면
Fig. 9. A screen displaying the ADS-B surveillance data.
그림 10. ADS-B 감시 자료, 레이더 감시 자료, 비행 정보를 동시에 현시하고 있는 화면
Fig. 10. A screen displaying the ADS-B data, the radar data, and the flight information at the same time.
그림 8. 구현한 ADS-B 모니터링 시스템과 실험 환경 Fig. 8. An implemented ADS-B monitoring system and
its experimental environment.
Ⅳ. ADS-B 모니터링 시스템 구현
ADS-B 모니터링 시스템은 Intel Xeon E5-2667 x86 프로세서 기반 워크스테이션과 RedHat Enterprise Linux 6 환경에서 Qt 4.8을 이용하여 구현되었다[15]. ADS-B 모니터링 시스템의 성 능 향상과 신뢰성 확보를 위해 각 블록은 분리되었으며, Qt의 signal, slot 메커니즘을 이용하여 분리된 블록 간에 정보를 공유 할 수 있도록 연결하였다.
ADS-B 모니터링 시스템의 성능 평가 및 검증을 위해 ADS-B 지상 시스템을 구성하여 실험하였다. 실험을 위한 ADS-B 지상 시스템은 1090ES ADS-B 지상 장비 2대, ADS-B 서버 1대, TIS-B 서버 1대, FIS-B 서버 1대로 구성하였다.
ADS-B 지상 시스템을 구성하는 서브시스템인 지상 장비들과 ADS-B 서버, TIS-B 서버, FIS-B 서버와는 이더넷으로 연결하 였으며 UDP를 이용하여 ASTERIX 형식의 자료를 주고받도록 구성하였다. ADS-B 감시 자료는 CAT021 버전 2.1을 이용하여 교환하며, ADS-B 지상 장비의 정보를 알리기 위해 ASTERIX CAT247 버전 1.2를 사용한다. 레이더 감시 자료는 CAT062 버 전 1.13을, FIS 자료는 전문 형식의 FIS-B product를 사용한다.
ADS-B 서버는 ADS-B 지상 장비가 실제 비행 중인 항공기의 ADS-B 신호를 수신하여 생성한 ASTERIX CAT021 메시지를 전달받으며, TIS-B 서버는 레이더의 항공기 추적 정보를 ASTERIX CAT062 메시지로 전달받는다. FIS-B 서버는 실제 비행 정보를 수신하는데 어려움이 있어 가상의 비행 정보를 주 기적으로 생성하게끔 설정하였다.
그림 8은 구현한 ADS-B 모니터링 시스템을 ADS-B 지상 시 스템에 연결한 그림이다. 그림 상의 좌측 모니터에 구현한 ADS-B 시스템이 동작 중인 것을 확인할 수 있으며, 그 뒤로는 ADS-B 지상 장비, ADS-B 서버 등이 위치해 있다.
그림 9는 1090ES ADS-B 지상 장비로부터 수신하는 ADS-B 감시 자료를 이용하여 대한민국 주변의 ADS-B 타겟을 현시하
고 있는 화면이다. 그림의 상단은 지도와 함께 타겟을 현시하는 현시창이며, 하단은 시스템의 상태를 나타내고 시스템의 설정 을 변경하기 위한 사용자 설정 메뉴이다. 그림의 상단 현시창에 서 검은색으로 표현된 마름모와 그 마름모에 실선으로 연결된 글상자는 각각 ADS-B 타겟과 해당 타겟의 편명, 고도, 속도를 나타내는 데이터 블록이다.
그림 10은 본 논문에서 구현한 ADS-B 모니터링 시스템의 항공 상황 종합 현시 기능을 볼 수 있는 그림으로, ADS-B 감시 자료와 레이더 감시 자료를 이용하여 인천국제공항과 김포공 항 주변의 ADS-B 타겟과 레이더 타겟을 동시에 현시하고 있는 화면이다. 그림 상의 검은색 타겟은 ADS-B 타겟을, 옅은 회색 타겟은 레이더 타겟을 의미한다. 그림 좌측 하단의 창은 모니터 링 시스템이 수신 중인 비행 정보를 현시하는 창으로 수신한 비 행 정보의 전문이 수신한 시간과 함께 표시되고 있다.
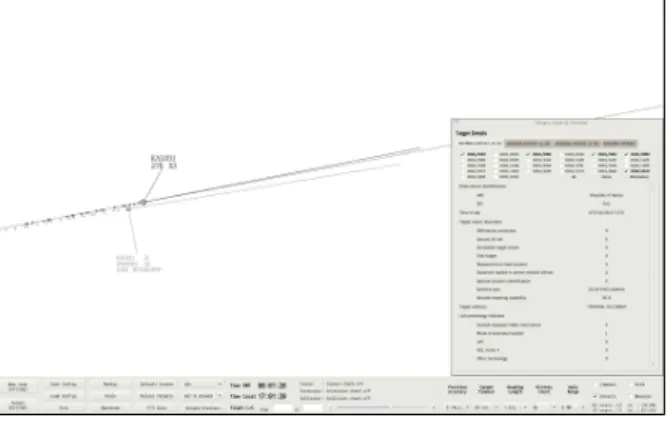
그림 11은 수신 중인 ADS-B 감시 자료의 세부 내용 현시 창 을 실행 중인 화면이다. 왼쪽 현시 창에서 선택된 타겟에 대한 ASTERIX CAT021 감시 자료의 전체 데이터 아이템이 오른쪽 세부 내용 현시 창에 나타나고 있는 것을 확인할 수 있다.
그림 12는 ADS-B 타겟과 레이더 타겟을 비교하기 위해 현
그림 12. ADS-B 타겟과 레이더 타겟의 비교
Fig. 12. A comparison between an ADS-B target and a radar target.
그림 11. ADS-B 감시 자료의 세부 내용을 현시하고 있는 화면 Fig. 11. A screen displaying a details of the ADS-B
surveillance data.
시창을 확대한 화면이다. 그림에서 검은색 타겟은 ADS-B 타겟 을, 옅은 회색 타겟은 레이더 타겟을 의미한다. 타겟 중앙의 도 형은 타겟의 위치를, 타겟의 앞쪽에 있는 직선은 타겟의 방향과 이동 예상 거리를 나타내며, 타겟의 뒤에 있는 점은 타겟이 위 치를 보고하거나 레이더에 포착된 위치를 나타낸다. 타겟에 실 선으로 이어져 있는 글상자는 타겟의 편명 혹은 레이더 응답 코 드, 고도, 속도를 나타내는 데이터 블록으로, 그림 상의 ADS-B 타겟은 FL400 (40,000ft), 430kt로 비행중인 ANA8493편이다.
그림에서 볼 수 있듯이 ADS-B 타겟은 레이더에 비해 앞쪽에 위치해 있으며, 과거 보고 위치가 좁은 간격으로 일정하고, 파 란색 대각선으로 표현된 항로상에 정확히 위치해 있다. 이를 통 해 ADS-B 타겟이 더 빠른 주기로 자신의 위치를 보고하고 있 으며, 더 정확한 위치를 보고하고 있다는 것을 확인할 수 있다.
Ⅴ. 결 론
본 논문에서는 항공 교통 상황 종합 감시용 ADS-B 모니터링
시스템을 설계하고 구현하였다. 설계 과정에서 ADS-B 시스템 표준 문서인 RTCA DO 문서들을 분석하여 ADS-B 모니터링 시스템이 갖춰야할 요구사항을 분석하고 적용하였으며, Eurocontrol ASTERIX 포맷을 사용해 항공 교통 관제 시스템뿐 만 아니라 ASTERIX 포맷을 지원하는 모든 ADS-B 지상 장비 와 연결할 수 있는 호환성을 확보하였다. 또한 MIL-STD-498 표준에 의거한 설계 진행을 통해 소프트웨어의 신뢰성을 확보 하였다. 구현한 ADS-B 모니터링 시스템은 실제 비행 중인 항 공기의 ADS-B 감시 자료와 레이더 감시 자료를 수신하는 실험 을 통해 성능을 입증하였다.
세계 항공 수요가 끊임없이 증가하고 있으며, 우리나라 역시 2020년까지 모든 항공기가 ADS-B를 사용하도록 할 계획을 세 워두고 있기 때문에 ADS-B 시스템의 신뢰성 확보가 절실하다.
본 논문에서 구현한 ADS-B 모니터링 시스템은 ADS-B 시스템 의 운용 상태를 실시간으로 감시할 수 있으므로 ADS-B 시스템 의 신뢰성 확보에 도움이 될 것으로 기대된다. 또한 본 논문에 서 구현한 ADS-B 모니터링 시스템은 항공 교통 상황 감시 기 능을 포함하므로 레이더가 설치되지 않은 소형 공항의 공항 주 변 항공 교통 감시 시스템으로 활용할 수 있을 것으로 기대된 다.
감사의 글
이 논문은 인하대학교의 지원에 의하여 연구되었음.
참고문헌
[1] T. J. Chang, “The Trend and forecast of Civil Aircraft Market,” Current Industrial and Technological Trends in Aerospace, Vol. 8, No. 1, pp. 12-22, Jul. 2010.
[2] S. C. Sung, 2012 Aviation Statistics, Seoul, Korea: Korea Civil Aviation Development Association, pp.173-198, 2012.
[3] Federal Aviation Administration, NextGen Implementation Plan [Internet]. Available:
http://www.faa.gov/nextgen/implementation.
[4] SC-186, Minimum Aviation System Performance Standards For Automatic Dependent Surveillance Broadcast (ADS-B), Radio Technical Commission for Aeronautics, 1828 L Street NW, Washington DC, USA, DO-242A, 2002.
[5] SC-186, Minimum Operational Performance Standards for 1090 MHz Extended Squitter Automatic Dependent Surveillance – Broadcast (ADS-B) and Traffic Information Service – Broadcast (TIS-B), Radio Technical Commission for Aeronautics, 1828 L Street NW, Washington DC, USA, DO-260B, 2009.
[6] SC-186, Minimum Operational Performance Standards for
Universal Access Transceiver (UAT) Automatic Dependent Surveillance - Broadcast (ADS-B), Radio Technical Commission for Aeronautics, 1828 L Street NW, Washington DC, USA, DO-282A, 2004.
[7] SC-186, Minimum Aviation System Performance Standards for Aircraft Surveillance Application (ASA), Radio Technical Commission for Aeronautics, 1828 L Street NW, Washington DC, USA, DO-289, 2003.
[8] D. Doukas, Eurocontrol Standard Document for Surveillance Data Exchange – Part 12: Category 021 ADS-B Reports, Eurocontrol, Eurocontrol Agency, 1130 Brussels, Belgium, SUR.ET1.ST05.2000-STD-12-01, 2011.
[9] A. Engel, Eurocontrol Standard Document for Surveillance Data Exchange – Part 9: Category 062 SDPS Track Messages, Eurocontrol, Eurocontrol Agency, 1130 Brussels, Belgium, SUR.ET1.ST05.2000-STD-09-01, 2010.
[10] A. Engel, Eurocontrol Standard Document for Surveillance Data Exchange – Part 16: Category 023 CNS/ATM Ground Station and Service Status Reports, Eurocontrol, Eurocontrol Agency, 1130 Brussels, Belgium, SUR.ET1.ST05.2000-ST
D-16-01, 2009.
[11] A. Engel, Eurocontrol Standard Document for Surveillance Data Exchange – Part 20 : Category 247 Version Number Exchange, Eurocontrol, Eurocontrol Agency, 1130 Brussels, Belgium, 2008.
[12] H. S. Jun, D. M. Kim, and C. H. Yeom, “Analysis of CNS/ATM Technology Trend,” Current Industrial and Technological Trends in Aerospace, Vol. 8, No. 2, pp.
113-123, Dec. 2010.
[13] United States Geological Survey, The Universal Transverse Mercator (UTM) Grid [Internet]. Available:
http://pubs.er.usgs.gov/fs/2001/0077/.
[14] Space & Naval Warfare Systems Command, Military Standard – Software Development and Documentation, United States Department of Defense, 2451 Crystal Drive, Arlington, VA, USA, MIL-STD-498, 1994.
[15] Digia, Qt- 4.8 Documentation [Internet]. Available:
http://qt-project.org/doc/qt-4.8/.
송 인 성 (Inseong Song)
2009년 2월 : 인하대학교 전자공학과 (공학사) 2011년 2월 : 인하대학교 전자공학과 (공학석사) 2011년 3월 ~ 현재 : 인하대학교 전자공학과 박사과정
※관심분야 : 병렬 및 분산 처리 시스템, 컴퓨터 아키텍처, ADS-B
장 은 미 (Eunmee Jang)
2002년 2월 : 인하대학교 전자전기컴퓨터공학부 컴퓨터공학전공 (공학사) 2005년 2월 : 인하대학교 정보 ·컴퓨터 교육학과 (교육학석사) 2010년 9월 ~ 현재 : 인하대학교 전자공학과 박사과정
※관심분야 : 컴퓨터 네트워크, 컴퓨터 아키텍처, ADS-B
윤 완 오 (Wanoh Yoon)
2002년 2월 : 경기대학교 전자공학과 (공학사) 2002년 2월 : 인하대학교 전자공학과 (공학석사) 2010년 2월 : 인하대학교 전자공학과 (공학박사)
2010년 ~ 현재 : 인하대학교 정보전자공동연구소 연구교수
※관심분야 : 병렬 및 분산 처리 시스템, 컴퓨터 아키텍처, ADS-B
최 상 방 (Sangbang Choi)
1981년 2월 : 한양대학교 전자공학과 (공학사) 1988년 : University of washington (공학석사) 1990년 : University of washington (공학박사) 1991년 ~ 현재 : 인하대학교 전자공학과 교수
※관심분야 : 컴퓨터 구조, 컴퓨터 네트워크, 무선통신, 병렬 및 분산처리 시스템