소형 Radar와 EO 카메라를 이용한 고정형 및 이동형 FOD 자동탐지 시험
Fixed and Moving Automatic FOD Detection Test using Radar and EO Camera
김 영 빈 1 · 김 성 희 1 · 박 명 규 3 · 박 광 근 3 ·김 민 수 3 · 홍 교 영 2*
1한서대학교 대학원 항공시스템공학과
2한서대학교 항공전자공학과
3(주)웨이브텍
Young-Bin Kim
1· Sung-Hee Kim
1· Myung-Kyu Park
3· Kwang-Gun Park
3· Min-su Kim
3· Gyo-Young Hong
1,2*1Department of Aircraft System Engineering, Hanseo University, Chungcheongnam-do, 31962, Korea
2Department of Avionics, Hanseo University, Chungcheongnam-do, 31962, Korea
3Wave Tech, Gyeonggi-do, 13906, Korea
[요 약]
FOD (foreign object debris)는 활주로 내의 항공기 운항과정에서 이에 위협을 가할 수 있는 모든 물질들을 총칭하는 단어이다.
과거 활주로 내에서 인적자원을 이용한 FOD 탐지 및 수거 방식은 효율성 및 경제성 면에서 매우 비효율적이기 때문에 국내에서 사용하기에 적합한 무인 FOD 탐지 시스템 개발이 필수적으로 요구되는 실정이다. 본 논문에서는 한서대학교 태안비행장에서 EO카메라 및 레이더를 이용한 고정형 FOD 자동 탐지 시스템과 이동형 FOD 자동 탐지 시스템을 연구 및 개발하고 고정형과 이 동형 방식을 운용하여 조도 및 기상환경에 상관없이 비행장의 활주로 내 자동 FOD 탐지가 가능함을 확인하였다.
[Abstract]
Foreign object debris (FOD) is a generic term for all substances that may pose a threat to aircraft operations on a runway. In the past, FOD detection and collection methods using human resources were very inefficient in terms of efficiency and economics, so it is essential to develop an unmanned FOD detection system suitable for domestic use. In this paper, the fixed FOD automatic detection system and mobile FOD automatic detection system using EO camera and radar were studied and developed at the Taean airfield of Hanseo University, and fixed and mobile method were operated to confirm that automatic FOD detection in the runway of the airfield is possible regardless of illumination and weather conditions.
Key word :
Foreign object debris, Fixed automatic detection, Electro-optic/Infrared laser light camera, Mobile radar.https://doi.org/10.12673/jant.2020.24.6.479
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 2 November 2020; Revised 10 December 2020 Accepted (Publication) 14 December 2020 (30 December 2020)
*Corresponding Author, Gyo-young Hong Tel: +82-41-671-6232
E-mail: [email protected]
Ⅰ. 서 론
FOD (foreign object debris)는 활주로 내의 항공기 운항과 정에서 이에 위협을 가할 수 있는 모든 물질 들을 총칭하는 단 어이며 EUROCAE에서는 FOD의 정의를 이동지역 내 운영 및 운항 기능이 없는 물체로 정의하고 있다. 발견되는 FOD는 주 로 항공기 부속품, 정비를 위한 공구이며 FOD는 항공기의 동 체에 피해를 발생시켜 운항중지를 유발시키기도 하며 제트엔 진에 빨려 들어가게 되면 항공기의 엔진체계 및 승객의 안전 에 지대한 위협을 끼치거나 주변 작업자들에게도 인적 피해 를 끼칠 수 있는 잠재적인 가능성을 갖고 있다. 실제로 샤를 드골공항을 이륙하던 에어프랑스 4590편 콩코드 여객기는 콩 코드기에 앞서 활주로를 선행한 여객기의 엔진 덮개에서 떨 어져 나온 40 cm 가량의 FOD가 타이어에 손상을 가했고 이로 인해 발생된 추가 FOD가 연료탱크를 파손시켜 화재가 발생 하여 113명이 사망하는 사고가 있었다. 현재 국내에서는 FOD 로 인한 항공기의 안전사고 사례가 없지만 추후 FOD로부터 의 안정성을 확신할 수 없기 때문에 FOD 발견 및 제거 작업은 항공기 운항의 안전을 위해 반드시 필요하다. 하지만 기존의 FOD발견과 수거 방식은 그림 1과 같이 인적 자원에 의한 수 단이 유일하다. 인적자원을 투입하여 FOD를 탐지하는 방식 은 활주로의 모든 시설들을 육안으로 점검하는 것은 경제성 과 효율성 이 매우 떨어지고 항시 할 수 있는 방식도 아니기 때문에 이에 따른 국내환경에 맞춰진 FOD 자동탐지 시스템 개발 및 운용이 반드시 요구된다. FOD 자동탐지 시스템은 공 항 및 활주로 내에서 24시간 주야에 관계없이 항시 탐지가 가 능하여야 하며 기상 조건에 관계없이 실시간으로 FOD탐지하 는 것 역시 가능해야 한다. 이에, 본 논문에서는 한서대학교 태안비행장 내에서 이동형 및 고정형 FOD탐지 시스템을 통 해 FOD탐지 실험을 진행하였으며 1 m 이내의 위치 정확도를 갖고 FOD 탐지하는 것을 확인하였다 [1],[2].
Ⅱ. FOD 자동 탐지 시스템 구성
2-1 FOD시스템 구성
FOD탐지 시스템은 활주로 영역 내에서 FOD자동 탐지가 가능하도록 고정형 탐지 시스템과 이동형 자동시스템의 합 으로 구성되며 각각 정보를 수집하고 수집된 정보들은 공항 의 담당 부서에 갖춰져 있는 통합운영시스템으로 전달되어 현장 관리자가 실시간으로 FOD 발생 알림, 통계 및 관리를 가능하게 되어 있어 활주로 내 FOD로 인한 안전성 및 경제 성 저하요인을 효율적으로 제거할 수 있게 한다.
2-2 고정형 FOD 자동 탐지 시스템
고정형 FOD 탐지 시스템은 레이더와 광학 카메라를 이용 하여 개발이 이루어졌으며 활주로의 길이에 따라 고정형 시 스템의 플랫폼 수가 결정된다. 고해상도의 영상자료를 효과 적으로 처리하여 FOD를 발견하며 기상조건에 영상에 왜곡이 발생될 수 있기 때문에 이 왜곡이 적은 지형에 설치한다 [2],[3]. 고정형 플랫폼의 경우 24시간 항시 감시가 가능한 이 점이 있지만 활주로 전체 영역의 감시를 하기 위해서 주변에 위치할 수 있는 장애물 및 환경들에 제약을 받지 않는 일정 높 이 이상을 갖는 형태로 설치하는 것이 요구된다. 항시 중단하 지 않고 FOD 탐지가 가능하고 고정되어있는 형태로 FOD를 탐지하기 때문에 공항이 운영되는 데에 시스템의 간섭을 최 소화 할 수 있어 운용 효율을 높일 수 있다는 장점이 있다. 현 재 태안 비행장에 설치되어 있는 고정 플랫폼은 그림 2와 같
그림 2. FOD자동탐지 시스템 및 구성
Fig. 2. Automatic FOD detection system and configuration.
그림 1. 인력자원을 이용한 FOD 탐지
Fig. 1. FOD detection by the manpower.
그림 3. 고정형 FOD 자동탐지 플랫폼
Fig. 3. Fixed FOD automatic detection platform.
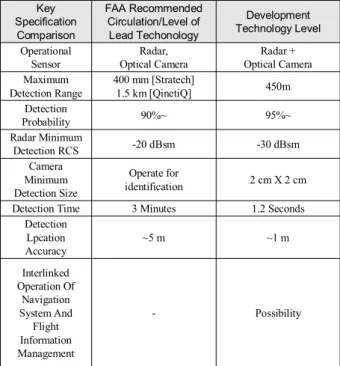
이 구성되어 있으며, 레이더와 EO 센서, 전원장치, 광 switch hub, 제어모듈로 구성되어 있다 [3],[4]. 표 1은 FAA 권고회람 / 선도기술 수준과 비교한 현재 고정형 플랫폼의 개발 기술 수준을 나타낸다.
2-3 이동형 FOD 자동 탐지 시스템
이동형 FOD 탐지 시스템은 고정형을 이용하기에 범위가 넓은 계류장, 유도로 등의 지역에서 사용하기에 용이한 탐지 시스템으로 이동이 가능한 플랫폼의 상단에 탐지장치들을 장 착하여 활주로 내를 이동하면서 FOD를 탐지하는 시스템이다.
표 1. 고정형 이물질 자동 탐지 시스템 기술비교
Table1. Comparison of automatic transparent material.
유저가 희망하는 시간대에 활주로 내의 FOD 물질들을 스 캔할 수 있다는 장점이 있고 설치에 따른 제약사항들이 없으 며 고정형 시스템 대비 운영비용이 저렴하다[2],[3].상시 FOD 탐지가 불필요한 소규모 공항의 FOD탐지 시스템 운영이 요 구될 때 적합한 방식이다. 통합 운영 시스템과의 통신은 무선 통신으로 이루어지며 무선통신의 사용에 제한이 있을 경우, 보안성에 관한 절차가 추가적으로 요구될 수 있다. 구성은 그 림4.와 같이 EO, 레이더 모듈, RTK 수신안테나, 제어모듈, 그 리고 무선 송수신기 등으로 구성되어 있으며 고정형과 동일 한 수준의 탐지능력을 갖추고 있다 [1],[4]. 표 2는 FAA 권고 회람 / 선도기술 수준과 비교한 현재 이동형 플랫폼의 개발 기술 수준을 나타낸다.
Key Specification
Comparison
FAA Recommended Circulation/Level of Lead Techonology
Development Technology Level Operational
Sensor
Radar, Optical Camera
Radar + Optical Camera Maximum
Detection Range
400 mm [Stratech]
1.5 km [QinetiQ] 450m
Detection
Probability 90%~ 95%~
Radar Minimum
Detection RCS -20 dBsm -30 dBsm
Camera Minimum Detection Size
Operate for
identification 2 cm X 2 cm
Detection Time 3 Minutes 1.2 Seconds
Detection Lpcation Accuracy
~5 m ~1 m
Interlinked Operation Of
Navigation System And Flight Information Management
- Possibility
System In Airports
Key Specification Comparison
FAA Recommended Circulation/Level of Lead Techonology
Development Technology Level Operational Sensor Radar Radar + Optical
Camera Maximum Detection
Range 180 m 120 m
Detection Probability 90%~ 95%~
Radar Minimum
Detection RCS -20 dBsm -30 dBsm
Camera Minimum
Detection Size - 2 cm
Detection Time 2 Seconds 1.2 Seconds
Detection Location
Accuracy ~5 m ~1 m
Vehicle Movement
Speed 48 km/h 60 km/h
Interlinked Operation Of Navigation System And Flight Information Management System In
Airports
- Possibility
표 2. 이동형 이물질 자동 탐지 시스템 기술비교
Table 2. Comparison of automatic transparent material
detection system.그림 4. 본 시험용 이동형 플랫폼 Fig. 4.Mobile platform for test.
Ⅲ. 고정형/이동형 레이더 및 EO센서 규격
3-1 고정형과 이동형 FOD탐지 시스템의 레이더 규격
고정형과 이동형 FOD탐지 시스템은 FOD물질의 정밀한 위치정 보를 운영시스템에 전송한다 [1],[4]. 표 3과 같이 고정형 FOD 자동 탐지 시스템과 이동형 FOD 자동 탐지 시스템의 레이더 방식은 FMCW레이더 방식이며 탐지거리는 고정형이 이동형에 비해 비교 적 긴 거리를 탐지 가능함을 알 수 있다 [3]. FOD 물질 탐지 능력 에서는 고정형과 이동형 모두 95% 이상 탐지할 수 있음을 확인하 였다 .
3-2 EO 센서 모듈 규격
고정형 EO카메라 모듈은 고정형 FOD 시스템 구조물의 상 부 펜스 위치에 장착되어 영상정보를 수집 하는 카메라와 수 집된 영상을 바탕으로 FOD를 탐지하는 EO 센서 프로세서로 구성된다. 표 4는 고정형 FOD 탐지 시스템과 이동형 FOD 탐 지 시스템의 EO 센서 모듈의 규격을 나타낸다. 고정형과 이 동형 모두 유효 화소수 1920 X 1060 (FHD)의 해상도로 영상 정보를 수집하며 렌즈는 고정형과 이동형은 각 1000 mm, 750 mm 를 채택하여 시험하였다 [1].
Key specification comparison
Detailed specification Fixed FOD
systems Moving FOD systems
System FMCW
Detection Range 400 m 120 m
Detection
Probability 95%~
Output Frequency 78~81GHz
Output Power 100 mW 10 mW
FOV(Beamwidth) 180° 90°
Detection Time ~1 Minute ~2 Seconds
Detection Location
Accuracy ~1 m
Minimum RCS -30 dBsm
Vehicle
Movement Speed N/A 60 km/h
표 3. 고정형과 이동형 FOD 시스템의 레이더 규격
Table 3. Radar specification for fixed and moving FOD
systems.Key specification
compairson
Specification Detailed specification
Ccarmera Number of effective pixels 1920 × 1060 (FHD) Minimum illumination 0.01 Lux
Lens Focal Length 1000 mm,
750 mm
Ptz
Pan Maximum 12
deg/sec
Tilt Maximum 9
deg/esc
IR Filter Useful Range 806 nm ~ 860
nm
IR Light Wave Length 806 nm
Maximum illumination distance 1500 m
표 4. 고정형과 이동형 FOD 시스템의 EO 센서 모듈 규격Table 4. EO sensor specification for fixed and moving FOD
systems.그림 5. 탐지 실험에 사용된 25mm볼트
Fig. 5.25mm bolt used in detection experiment.
Ⅳ. 고정형/이동형 FOD 자동 탐지 시스템의 탐지 결과
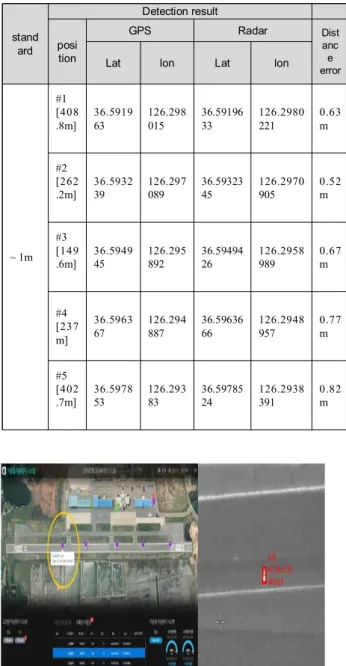
태안 비행장 내에서 고정형 플랫폼과 이동형 플랫폼을 통 해 구축한 FOD자동 탐지 시스템의 실험을 진행하기 위해 FAA 권고사항에서 제시하는 이물질 분류를 고려하여 총 12 개의 시험용 이물질을 선정하였고 이에 대한 탐지 실험을 수 행하였다. 또한 그림 5와 같은 25 mm 크기의 볼트를 이용하 여 실제 FOD로 발견되는 빈도수가 높은 볼트에 대한 FOD탐 지 시험을 수행하였을 때, 평균적으로 0.7 m 이내의 거리오차 를 갖고 FOD를 탐지함을 알 수 있었다.
이동형 FOD 자동탐지 시스템의 경우 최대 120 m 까지의
한계치를 갖고 탐지 가능하며, 고정형은 대략 410 m까지의
탐지 가능 거리를 확인하였다. 그림 6은 25 mm 볼트를 탐지
하는 탐지 시험을 수행한 결과이며, 표 5는 탐지한 볼트들의
stand ard
Detection result
posi tion
GPS Radar Dist
anc e error
Lat lon Lat lon
~ 1m
#1 [408 .8m]
36.5919 63
126.298 015
36.59196 33
126.2980 221
0.63 m
#2 [262 .2m]
36.5932 39
126.297 089
36.59323 45
126.2970 905
0.52 m
#3 [149 .6m]
36.5949 45
126.295 892
36.59494 26
126.2958 989
0.67 m
#4 [237 m]
36.5963 67
126.294 887
36.59636 66
126.2948 957
0.77 m
#5 [402 .7m]
36.5978 53
126.293 83
36.59785 24
126.2938 391
0.82 m
표 5. FOD의 GPS좌표 값과 레이더 탐지 좌표값의 차이Fig. 5. Difference between the GPS coordinate value of the
FOD and the radar detection coordinate value.그림 6. 레이더와 EO 카메라를 통한 25mm볼트 탐지 결과 Fig. 6.Results of 25mm Bolt detection using radar and EO
camera.
위치 정보전송 값과 GPS위치 값에 대한 차이를 나타낸다. 실 험 수행을 통하여 FOD 자동탐지 시스템의 실제 FOD 탐지 가 능유무와 정확도를 확인할 수 있었다 [1]-[3]. 또한 탐지거리, 위치 정확도, 탐지 확률 결과가 FAA 권고사항에서 제시하는 수치에 만족함을 확인했다.
Ⅴ. 결 론
FOD 는 안전성과 경제성에 큰 위협을 끼치는 요소로서, 이를 제거하기 위해 인적자원을 투입하는 것에 대한 비효율 성 문제로 자동탐지 시스템을 통해 인적자원낭비와 운항에 위협이 되는 요인을 최소화하려는 연구가 진행 중에 있다.
본 논문에서는 한서대학교 태안비행장에서 이물질 자동탐 지 시스템에 대한 개발 및 실험을 진행하였고, 주간과 야간 시간대에서의 지속적인 탐지 실험 수행을 통해 FOD 탐지능 력이 FAA가 권고하는 사항을 충족시킴을 확인하였다. 또한 현재 연구가 진행됨에 따라 기존 400 m탐지 거리가 최대였던 고정형 탐지 시스템의 한계거리가 현재 450 m 까지의 탐지가능 함이 검증되었고, 자체적으로 개발한 이동형은 120 m정도 까 지 탐지 할 수 있음을 확인하였다. 고정형 FOD 자동 탐지 시 스템과 이동형 FOD 자동 탐지 시스템의 통합운용을 시행한 결과, FOD탐지 시스템이 정상적으로 운용될 수 있음을 확인 하였고, FOD에 대한 GPS좌표와 탐지 좌표의 위도, 경도는 1m 이내의 오차를 갖고 있음을 확인하였다.
Acknowledgments
본 연구는 국토교통부/국토교통과학기술진흥원의 지원으로 수행되었습니다. (과제번호: 15ATRP-C108046-01)
References
[1] S. H. Kim, M. J. B. Hong, K. G. Park, I. G. Choi and G. Y.
Hong, “ Performance comparison and test of fixed FOD automatic detection system and moving FOD automatic detection system,” The Journal of Advanced Navigation Technology, Vol. 23, No. 6, pp. 495-500, 2019.
[2] H. S. Shin, G. Y. Hong, J. B. Hong, Y.S.Choi, and Y. S.
Kim, “Automatic FOD detection test using EO/IR laser light camera,” The Journal of Advanced Navigation Technology, Vol. 21, No. 6, pp. 638-642, 2017.
[3] J. B. Hong, M. S. Kang,Y. S and G. Y. Hong, “Experiment on automatic detection of airport debris (FOD) using EO/IR cameras and radar,” The Journal of Advanced Navigation Technology, Vol. 22, No. 6, pp. 522-529, 2018.
[4] S. H. Kim, M. K. Park, G. Y. Hong, J. S. So, S. K..Kim, and U. E. Kim, “Analysis for FOD automatic detection system,” The Journal of Advanced Navigation Technology, Vol. 20, No. 3, pp.210-217, 2016.
[5] K. B. Lee, A study for efficient foreign object debris
detection on runways, Ph D. dissertation, Incheon
University, Incheon, Korea, March, 2014.
[6] K. B. Lee, FOD automatic detection system a study on the development direction for localization, Ph.D. dissertation, Incheon University, Incheon, Korea, July 2014.
[7] J. Huh and C. W. Kim, “A study of laboratory measurement of EO GRD resolution for airborne EO/IR sensor,” Journal of the Korea Institute of Military Science and Technology, Vol. 17, No. 6, pp. 793-799, 2014.
김 영 빈 (Young-Bin Kim)
2013년 3월 ~ 2020년 2월 : 한서대학교 항공전자학과 (공학사) 2020년 3월 ~ 현재 : 한서대학교 대학원 항공기 시스템학과
※관심분야 : 항공기 시스템, 비행시험, FOD
김 성 희 (Sung-Hee Kim)
2015년 3월 ~ 2019년 2월 : 한서대학교 항공전자학과 (공학사) 2019년 3월 ~ 현재 : 한서대학교 대학원 항공기 시스템학과
※관심분야 : 항공기 시스템, 비행시험, FOD
박 명 규 (Myung-kyu Park)
1996년 : 경남대학교 전자공학 (공학사), 1998년 : 경남대학교 통신공학 석사 1997년 ~ 2000년 : LG정보통신 주임연구원, 2000년 ~ 2015년 : ㈜피플웍스 상무이사 2015년 ~ 현재 : ㈜웨이브텍 상무이사
※관심분야 : mmWave radar system
박 광 근 (Kwang-Gun Park)
2011년 : 경기대학교 전자학과 (공학사), 2014년 : 성균관대학교 이동통신학과 (공학석사) 2014년 ~ 2017년 : 한국단자공업(주) 선임연구원, 2017년 ~ 2018년 : ㈜피플웍스 책임연구원 2018 ~ 현재 : ㈜웨이브텍 SI사업부 수석연구원
※관심분야 : C/X/Ku/Ka/E band PA/MM wave & Radar SI
김 민 수 (Min-Su Kim)
2009년 : 경남대학교 정보통신공학과 (공학사), 2011년 : 경남대학교 첨당공학과 석사 2015년 : 경남대학교 첨단공학과 박사, 2013년 ~ 2016년 : ㈜LICT 기술연구소 선임연구원 2016 ~ 현재 : ㈜웨이브텍 SI사업부 책임연구원
※관심분야 : milimeter wave, SI, Radar
홍 교 영 (Gyo-Young Hong)