접수일(2012년 5월 23일), 수정일(1차 : 2012년 6월 14일, 게재 확정일 : 2012년 7월 1일)
* 나로호체계종합팀/[email protected] ** 나로호체계종합팀/[email protected]
*** 나로호체계종합팀/ [email protected] **** 나로호체계종합팀/[email protected]
***** 나로호체계종합팀/[email protected]
나로호 상단 발사관제시스템 개발 및 발사운용 결과
서진호*, 윤원주**, 김광수***, 이수진****,정의승****
Development and Operations of LV PACS-II for the Launch Vehicle NARO
Jin-Ho Seo*, Won-Ju Yoon**, Kwang-Soo Kim***, Soo-Jin Lee****, Eui-Seung Chung*****
Abstract
The NARO is South Korea's first carrier launch vehicle, which made its flights from NARO Space Center on 25 August 2009 and 10 June 2010. LV PACS(Preparation Automated Control System) is a electrical ground support system to monitor and control the integrated launch vehicle during the launch preparation and operation in Launch Complex. As a subsystem of LV PACS, LV PACS-II was developed for launch preparation and operation of the NARO upper stage, and all the functions and requirements were verified successfully through NARO flight tests. In this paper the core technology and characteristics applied to LV PACS-II are described.
초 록
지난 2009년과 2010년 2회 비행시험을 수행한 나로호는 나로우주센터에서 발사준비 및 발사작업이 진행되었다. 발사관제시스템은 우주센터의 발사패드에 총조립된 상태로 장착 된 발사체에 대한 발사작업을 위하여 발사체, 발사대, 추진지상공급계 등 외부시스템에 대 한 명령을 전달하고 데이터를 실시간 모니터링하여 발사준비 프로세스를 총괄 운용한다.
발사관제시스템의 서브시스템인 상단 발사관제시스템은 나로호 상단에 대한 지상 발사작 업을 제어 및 감시할 수 있도록 개발되었으며 나로호 비행시험을 통해 발사준비 프로세스 자동 및 수동처리, RCS 충전, 상단 온도환경상태 감시 등의 요구 기능들이 모두 설계 기 준에 부합하는 것으로 확인되었다. 본 논문에서는 상단 발사관제시스템의 핵심 기술과 특 성을 기술하며 발사운용 결과를 분석하였다.
키워드 : 발사관제시스템(PACS), RCS 충전(RCS GN2 supply), 자동시퀀스(auto sequence), 삼중화 (triple redundancy), 환경제어(environmental control), 전원공급장치(electrical power supply)
1. 서 론
발사관제시스템은 로켓이나 우주왕복선 등 우 주비행체의 발사를 위하여 우주비행체 및 발사대 시스템의 발사작업을 총괄 운용하는 시스템이다.
NASA는 1970년대부터 우주왕복선 프로그램을 진행하면서 우주왕복선 발사대시스템 및 탑재시 스템을 자동화된 발사운용 작업이 가능하도록 개 발하였으며, 실시간 데이터 분석과 정보 전시, 상 용화 제품 적용, 모듈화 등의 특징들을 가지고 있다[1]. Ariane V 발사관제시스템은 발사체와 지상장비간의 모든 인터페이스를 관리하며 발사 카운트다운을 통제하는 가장 큰 지상장비로서 4 개 사이트에 분산된 실시간 시스템으로 구성되 며, 사이트 간에는 광케이블 네트워크로 연결되 어 있다. 또한 안전과 고가용성을 위해 Front-End 장비, 프로세싱 서버장비, 네트워크는 이중화되어 있으며 결함허용 기능이 있어 어느 하나의 장비에 고장이 발생하여도 발사작업의 중 단없이 온라인 수리작업과 수리작업 후 재투입이 가능하도록 개발되었다[2]. 국내 로켓 관련 발사 통제시스템은 KSR-I, KSR-II에서는 추진체가 고 체모터인 관계로 비교적 간단한 장치로 구성되었 으며, KSR-III 발사통제시스템은 액체로켓엔진 발 사준비 과정에서 연료 및 산화제 충전, 선가압, 가압 등의 과정을 자동 순차적으로 처리하기 위 한 장비로 개발된 바 있다[3]. 나로호 발사관제 시스템은 우리나라가 국제협력국인 러시아가 공 동으로 개발한 것으로 제어대상체의 개발주체에 따라 발사관제시스템의 개발책임을 구분하여 개 별적으로 개발 후 최종적으로 통합 연계시험을 통해 성능 인증시험 수행 후 발사운용에 사용되 었다[4]. 본 논문에서는 나로호 상단 발사관제시 스템을 중심으로 개발개념, 적용된 주요기술, 2차 에 걸친 발사운용 결과를 기술한다.
2. 나로호 발사관제시스템 구성
발사관제시스템의 제어대상은 발사체 탑재장
SC Upper
Stage First Stage
LV PACS-I
GMS
Ground Equipment TE ACS
ACS system dedicated to ILV (Launch Complex & LCC area)
LV PACS-II CTS
Launch Director Spacecraft
Manager
SC Checkout Equipment CT, UTC
CSGE Mission Director Center
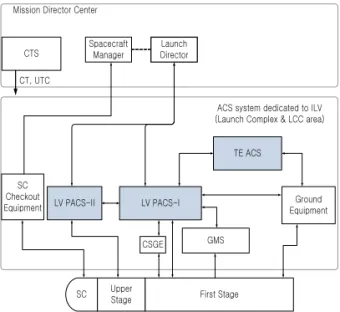
그림 1. 나로호 발사관제시스템 구성도 (CTS : Central Timing System, CT : Countdown Time, UTC : Universal Time Coordinated, ACS : Automated Control System, PACS : Preparation Automated Control System, SC : Spacecraft, , CSGE : Control System Ground Equipment, GMS : Ground Measurement System)
비와 지상장비가 되는데, 발사체 탑재장비는 이 륙 후의 주요 비행시퀀스 수행을 통해 탑재체를 궤도에 투입하기 위한 일련의 비행시퀀스 임무를 수행하는 것이며, 지상장비는 발사체의 발사대 장착/탈착, 발사체 기립/하강, 발사체 탑재장비 온도제어, 추진제 및 가스류 충전 등의 임무를 수행한다. KSLV-I 발사관제시스템의 간략한 구성 도를 그림 1에 나타내었다[4]. 상단 발사관제시스 템(LV PACS-II)은 명칭에서 의미하는 바와 같이 발사체 상단 탑재장비의 지상 발사작업을 수행하 며, 상단에 탑재된 롤추력기 자세제어시스템 (RCS)에 질소가스 충전 및 상단 온도제어를 위 해 필요한 명령 및 데이터 송수신을 위해 1단 발 사관제시스템(LV PACS-I)과 3중화 통신을 하게 된다. 1단 발사관제시스템(LV PACS-I)과 지상장 비제어시스템(TEACS)간 통신에 의해 지상장비에 서 발사체 상단으로 질소가스 공급 및 온도제어 를 위한 고압공기 공급이 수행된다. 또한 상단 발사관제시스템은 발사책임자에게 발사준비작업
J-06 J-05 J-04 J-03 J-02 J-01
422Ø Optic Converter 422Ø Optic
Converter
INGU SDUL Console RS-422
422Ø Optic Converter 422Ø Optic
Converter RS-422(INGU)
Launch Building (R129) LCC
T e rm in a l B lo ck
FTS Console F
D F
F D F
422Ø Optic Converter 422Ø Optic Converter 422Ø Optic Converter 422Ø Optic Converter
RS-422
RS-422
RS-422
RS-422 Fiber optic
Fiber optic
S/W
RCS Filling Console
INGU TLM GPIB Gateway
RCS TLM PDU TLM FTS TLM
LCTS TLM KM TLM TVC TLM GPS TLM
SVM Console UEW
Console TCP/IP
BB #1
MDC
LD AWS BB #2 UTP Communication
Room
SAM Acquisition
SPE Management
TCP/IP
RS-422
LDW TLM
K S L V - 1
422Ø Optic Converter 422Ø Optic Converter 422Ø Optic Converter 422Ø Optic Converter RS-422(PDU) RS-422(GPS) RS-422(TVC) RS-422(RCS) RS-422(INGU)
422Ø Optic Converter 422Ø Optic Converter LTLM
Fiber Optics for Network S/W, INGU, RCS, TVC, GPS, PDU
422Ø Optic Converter 422Ø Optic Converter
TLM 점검장비 LTLM
Functional Activation Bias FTS1 FTS2 RCS Signal
interface
S/W control GPIB
POWER SUPPLY PLC
TCP/IP
RCS Control Console
TVC Console
PDU Console GPS Console
LCTS Console
KM Console
LDW Console
EW Console
HMI(CCS) DRS
그림 2. 나로호 상단 발사관제시스템 구성도 진행상황을 실시간 보고하는 통신 체계를 가지고
있다.
3. 나로호 상단 발사관제시스템 개발
3.1 시스템 주요 기능 및 요구조건
상단 발사관제시스템의 주요 기능은 다음과 같다.
○ 상단 탑재장비에 대한 발사준비 프로세스 수행
○ 상단 탑재장비에 대한 명령전달 및 데이 터 수집
○ 발사 15분 전부터 자동시퀀스 수행
○ RCS에 고압 질소가스 충전
○ 상단 탑재장비 환경제어(온도,습도,압력)
○ 비정상상태 발생시 자동 복귀시퀀스 수행
○ 비행임무 발사통제시스템, 1단 발사관제시스 템과의 인터페이스 처리
○ 상단 시뮬레이터를 통한 상단 발사관제시스 템 기능 점검, 성능시험, 운용자 훈련
상기의 주요 기능을 구현하기 위하여 상단 발 사관제시스템의 기술적 요구사항은 다음과 같이 분석되었다[5].
○ 제어콘솔에서 생성된 명령은 500ms 이내에 상단 탑재장비에 전달되어야 한다.
○ 상단 탑재장비로부터의 데이터는 500ms 이 내에 제어콘솔에 전달되어야 한다.
○ 콘솔 데이터의 전시 갱신주기는 10Hz 이상 이어야 한다.
○ 상단 탑재장비와 상단 발사관제시스템에서 생성되고 획득된 모든 데이터는 실시간으로 저장되고 전시될 수 있어야 한다.(최대 100Hz).
○ 상단 발사관제시스템은 우주센터 표준시각시
(a) 발사관제소
(b) 발사시설
그림 3. 상단 발사관제시스템 장비 설치 현황 스템으로부터 세계표준시와 카운트다운시각 을 수신 처리할 수 있어야 한다.
○ 상단 발사관제시스템과 상단 탑재장비간 RS-422 통신은 각각 독립적으로 설치되어 혼선이 발생되지 않아야 한다.
○ 네트워크는 2중화, 상단 탑재장비에 대한 디 스크릿/아날로그 입출력 제어기는 3중화되 어야 한다.
○ 상단 탑재장비에 직류전원을 공급하는 전원 공급장치는 원격에 위치한 제어콘솔에서 제 어 및 모니터링이 되어야 한다.
3.2 상단 발사관제시스템 구성
3.1절에서 도출된 기능 및 요구사항들을 만족 하기 위하여 상단 발사관제시스템은 그림 2, 그 림 3과 같이 발사관제소(LCC)에 명령제어서버와
데이터저장 서버, 제어콘솔을 배치하고, 발사시설 (LB)에는 엄빌리컬을 통해 전기적인 인터페이스 를 수행하는 3중화 제어장비와 전원공급장치 등 으로 구성된다. 제어콘솔은 발사체 상단의 각 서브시스템을 지상에서 제어 및 모니터링하는 컴 퓨터로서 상단 탑재장비와 RS-422 통신기능을 가 지며, 명령제어서버는 발사체 상단에 대한 디스 크릿/아날로그 입출력 알고리즘 구현 및 발사체 상단 정보의 분배 기능을 수행한다. 데이터저장 서버는 발사체 상단 및 상단 발사관제시스템에서 생성되는 모든 데이터를 저장하고 실시간 전시한 다. 또한 상단 탑재장비에 대한 디스크릿/아날 로그 입출력 제어기는 3중화 제어장비(TMR PLC)로 구성하여 고신뢰도와 고가용성을 확보하 였으며, 발사체 상단에 대한 디스크릿/아날로그 입출력 알고리즘 구현 및 자동시퀀스/비상정지 시퀀스 내장하여 처리하도록 하였다. 데이터 통 신을 위한 네트워크는 그림에서 보는 바와 같이 이중화로 구성되었으며, 원격에서의 직류전원공 급장치 제어 및 모니터링을 위해 LAN/GPIB 게 이트웨이 장비가 사용되었다.
3.3 인터페이스
상단 발사관제시스템과 상단 탑재장비 간 인 터페이스 형태(입출력은 지상기준임)는 RS-422 통신, 아날로그 입력, 디스크릿 입력/출력, 텔레 메트리 PCM(Pulse Code Modulation) 데이터 수 신, 직류전원공급으로 분류할 수 있다. RS-422 통신은 엄빌리컬 케이블의 수량을 대폭 줄이면서 인터페이스 데이터의 고속처리 및 포맷 변경이 용이하다는 등의 장점이 있으며, 발사운용 결과 데이터 에러 발생 측면에서도 강인한 특성이 확 인되었다. 아날로그 입력은 파이로장치의 안전/
장전모드 상태 모니터링을 위해 4~20mA 입력모 듈이 적용되었으며 상단 환경상태 모니터링을 위 해서는 0~5V 입력모듈이 적용되었다. 디스크릿 입력/출력은 발사준비 이벤트 시퀀스를 처리하 기 위해 적용하였다.
3.4 상세 개발 결과 및 기술적 특징 3.4.1 명령제어서버 및 데이터저장서버
명령제어서버(CCS)는 상단 발사관제시스템의 중추적인 장비로서 제어콘솔 운용요원의 로그인 관리, 카운트다운 수신 및 분배, 발사시설에 설치 된 TMR PLC와의 인터페이스, 1단 발사관제시스 템과의 인터페이스, 발사통제시스템과의 인터페 이스를 처리하며 그림 4와 같은 소프트웨어 기능 으로 구성된다. 또한 명령제어서버의 다양한 인 터페이스 임무에 따른 중요도를 고려하여 하드웨 어 이중화 및 무정지 요건을 만족하기 위하여 Stratus사의 ftServer-4300 제품이 도입되었다./
그림 4. 명령제어서버 소프트웨어 기능도
데이터저장서버(DRS)는 상단 탑재장비에 전달 되는 명령, 상단 탑재장비로부터의 데이터와 상 단 발사관제시스템에서 생성되는 모든 데이터를 파라미터화하여 실시간 저장함과 동시에 발사운 용자가 요청할 시에는 실시간으로 데이터를 전시 할 수 있도록 개발되었으며 그림 5와 같이 소프 트웨어가 구성되었다. 데이터저장서버가 실시간 으로 데이터를 수신받기 위해서는 다양한 형태를 가지는 서브시스템과의 데이터 통신 프로그램이 필요하게 되며 이를 위해 입출력 서버 프로그램 을 별도로 개발하였다. 입출력 서버 프로그램에 는 컴퓨터의 상태정보(CPU 사용량, 하드디스크 사용량)를 전송하는 PCInfoServer, 상단 탑재장비 와의 RS-422 통신 데이터를 처리하는 PDU Server, RCS Server, TVC Server가 있으며, 지상
전원공급기를 제어하기 위한 GPIB Server, PACS-1.1 인터페이스를 처리하는 PACS 1.1 Server 및 PLC와의 통신을 위한 DDE Server가 있다. 데이터 저장 소프트웨어로는 Wonderware 사의 InSQL Historian 제품이 적용되었다.
그림 5. 데이터저장서버 소프트웨어 기능도
3.4.2 제어콘솔
제어콘솔은 상단 탑재장비의 종류와 발사준비 작업 임무를 고려하여 Wonderware사 InTouch 프로그램을 사용하여 개발되었다. 그림 6의 상 단 발사책임자 콘솔은 직접적인 제어는 수행하지 않으며 상단 탑재장비의 발사준비 관련 주요 상 태를 모니터링함으로써 상단 책임자에게 발사준 비작업에 필요한 중요 정보를 제공한다. 그림 7 은 PDU 제어콘솔의 상단 탑재장비의 전력분배 를 담당하는 PDU의 제어콘솔 화면이며, 그림 8 은 RCS 충전을 위한 제어콘솔로서 단계별 충전 작업과 상태모니터링이 가능하다.
그림 6. 상단 발사책임자 제어콘솔 화면
그림 7. 상단 전력분배장치(PDU) 제어콘솔 화면
그림 8. 롤추력기 자세제어시스템(RCS) 질소 충전콘솔 화면
3.4.3 TMR PLC
발사시설에 위치한 아날로그 및 디스크릿 입 출력 제어기(TMR PLC)는 Triple Modular Redundant 구조의 Triconnex사 Tricon 시스템을 적용하였다. 이 TMR PLC는 3중화에 기반한 강 인한 결함허용시스템으로서 높은 신뢰도와 더불 어 고장 전파를 차단하는 기능을 가지고 있으며 연속된 프로세스 처리를 위하여 2 of 3 다수결 보팅을 채택하고 있다. 또한 3중화된 프로세스 컨트롤러는 운전 중에도 고장난 컨트롤러를 장탈 착할 수 있으며, 3대의 컨트롤러 중 2대가 고장 나더라도 운전이 가능하다는 특성을 가지고 있어 고가용성이 요구되는 발사운용 임무에는 매우 적 합한 장비로 판단된다. 그림 9와 그림 10에 TMR PLC의 개념도 및 구성도를 나타내었다.
그림 9. Tricon TMR PLC 개념도
그림 10. Tricon TMR PLC 구성도
3.4.4 상단 시뮬레이터
상단 시뮬레이터는 상단 발사관제시스템의 개 발시험과 발사운용 사전 시험에 활용할 목적으로 개발되었다. 상단 발사관제시스템 개발시험 단 계에서는 개별적인 전기신호를 생성/수집하여 해당 단위 기능을 인증하는데 활용하였으며 상단 발사관제시스템 성능시험 단계에서는 시뮬레이터 의 모드를 명령지연, 수집지연, 저장주기로 구분 하여 각각에 대한 성능시험을 수행하는데 사용하 였다. 발사 운용 단계에서는 발사운용에 참여하 는 운용요원에 대한 정상시나리오와 비정상시나
리오 등을 선택하여 운용자 훈련 및 휴먼에러 요 소를 미연에 예방할 목적으로 시뮬레이터를 활용 하였다. 그림 11과 같이 시뮬레이터와 상단 발 사관제시스템의 인터페이스는 전기 엄빌리컬을 동일하게 모사하였으며, 그림 12는 시뮬레이터 운용화면을 보여준다. 시뮬레이터는 상단 탑재 장비 분류에 따라 독립적으로 화면을 구성하였으 며, 각각의 파라미터값을 운용자가 직접 입력하 여 출력할 수 있도록 구성되어 있어 상단 발사관 제시스템의 기능 점검, 정상 및 비정상 발사시퀀 스 점검, 운용자 훈련에 매우 유용하게 사용되었 다.
Upper Stage Simulator
(PXI)
LV PACS-II
DiscreteRS-422 Analog
PDU TVC RCS
그림 11. 시뮬레이터와 상단 발사관제시스템 연결도
그림 12. 시뮬레이터 운용화면
3.4.5 성능시험
상단 발사관제시스템 성능시험은 다음과 같은 항목에 대해 지연시간 및 주기의 요구사항을 만 족하는지 여부를 객관적으로 검증하기 위해 수행 되었다.
그림 13. 명령전달 지연시간 검증 구성도
그림 14. 데이터수집 지연시간 검증 구성도
○ 제어콘솔에서부터 상단 탑재장비까지의 명령 전달 지연시간 : 500ms 이내
○ 상단 탑재장비에서 제어콘솔까지 데이터 수 집 지연시간 : 500ms 이내
○ 데이터저장서버에서 데이터 저장 주기 : 최 대 100Hz
○ 제어콘솔에서 데이터 전시 갱신 주기 : 최소 10Hz
그림 13은 명령전달 지연시간 검증 구성도이 며, 그림 14는 데이터수집 지연시간 검증을 위한 구성도를 나타낸 것이다. 검증시험 결과는 표 1 과 같이 RS-422 관련 항목이 TMR PLC 항목에 비해 명령전달과 데이터수집 지연시간이 짧게 나 타나고 있는데, 이것은 TMR PLC 항목이 상대적
으로 연결지점이 다수이며 또한 TMR PLC의 스 캔타임이 70ms인 것이 반영된 것이라 할 수 있 다. 성능시험의 종합적 결과는 모든 요구사항을 만족함고 있음을 보여준다.
Test Item Type of signal Results Command delay
time PLC command 187ms
Serial(RS-422) Command 59ms Data delay time PLC data 259ms
Serial data 55ms Console display
cycle
PLC data 14.10Hz Serial data 23.52Hz Data storage PLC data 98.85%
Serial data 100%
표 1. 성능시험 결과
4. 발사운용 결과
상단 발사준비작업은 D-2 day에 총조립 발사 체를 발사대에 장착 후 수행하는 엄빌리컬 연결 점검, D-1 day에 수행하는 최종발사준비점검, 그 리고 최종 발사당일에 수행하는 발사당일 시퀀스 로 진행된다. 엄빌리컬 연결 점검에서는 온보드 장비 전원인가 및 상태, Line TLM 데이터 수신 상태 점검, Navigation Start 송수신 확인, INGU(Inertial Navigation and Guidance Unit) 및 FTS(Flight Termination System) Liftoff 송수 신 확인, 온보드 배터리 상태 점검, 내부전원/
외부전원 절환 점검이 수행되었다.
상단 최종발사준비점검에서는 엄빌리컬 연결 점검 단계의 수행내역 외에 상단과 우주센터 Range 시스템간 연동 기능을 점검하여 최종 발 사작업을 수행할 수 있는 준비가 되었는지를 확 인하였다. 발사당일에는 RCS 질소충전 시작, 상 단 탑재장비 전원인가, 파이로 점화선 점검, RCS 질소충전 완료, 파이로 장치 장전모드 전환, 발사 15분전 자동시퀀스 진행 순서대로 수행되었다.
2009년 8월 나로호 1차 비행시험과 2010년 6월 2
차 비행시험에서는 상단 발사관제시스템이 발사 운용에 필요한 명령생성 및 전달, 상단 및 상단 발사관제시스템 데이터 수집 및 저장, PLO 자동 시퀀스 수행 등의 모든 단위 기능 및 통합 기능 측면에서 안정적으로 운용되었음을 확인하였다.
3.1절에서 도출된 각각의 기술적 요구사항들에 대한 발사운용 결과를 다음에 정리하였다.
○ 명령전달지연시간 500ms 이내 : 상단 탑 재장비에는 제어콘솔로부터 전달되는 명령수신 시간정보를 붙이는 기능이 없어 발사운용 단계에 서는 실제적인 명령지연시간을 확인할 수 없었으 나, 1차와 2차 나로호 발사시험에서는 명령지연 에 따른 어떠한 문제도 발생하지 않았다.
○ 데이터수집지연시간 500ms 이내 : 상단 탑재장비에는 지상장비로 데이터 송신 시 시간정 보를 붙이는 기능이 없어 실제적인 데이터수집지 연시간을 확인할 수는 없었다. 명령전달지연시 간과 데이터수집지연시간은 성능시험 결과로 대 체할 수 있다.
○ 콘솔 데이터의 전시 갱신주기는 10Hz 이 상 : 콘솔에 표시되는 데이터의 전기 갱신주기는 발사운용 단계에서는 정량적으로 측정할 수 없었 으나 운용자들의 평가에 따르면 데이터 전시 갱 신의 지연에 따른 문제점은 없는 것으로 파악되 었으며 구체적인 수치는 성능시험 결과로 대체할 수 있다.
○ 데이터 저장 주기 최대 100Hz : 상단 발 사관제시스템 내부 데이터 전송량을 줄이기 위하 여 상단 탑재장비의 데이터는 그 값이 변했을 때 에만 저장하는 구조로 되어 있으므로 발사운용 시 상단 데이터의 변화주기가 100Hz가 아닌 경 우에는 본 요구사항의 만족여부를 정량적으로 판 단하기는 어려운 실정이다. 시뮬레이터에서 데 이터를 인위적으로 100Hz의 주기로 변화시키면 서 저장주기를 확인했던 성능시험 결과를 참고해 보면 발사운용 상단 데이터는 100Hz 이내로 변
LV Upper Stage
RS-422 케이블
RS-422 케이블
광케이블
RS-422/Optic Converter (발사관제소) RS-422/Optic Converter
(발사대 장비실)
...
...
제어콘솔
그림 15. RS-422 통신 계통도
화하므로 데이터 저장에는 문제가 없었을 것으로 사료된다.
○ 세계표준시(UTC)와 카운트다운시각(CT)을 수신 처리 : 시각정보 수신은 다음과 같이 정상 적으로 수행되었다.
- 데이터저장서버 : UTC(IRIG-B) - 명령제어서버 : UTC(IRIG-B), CT - 제어콘솔 : UTC(NTP)
- UEW(Underpad Engineering Workstation) : CT 정보 수신 처리후 TMR PLC에 전달하여 CT 에 맞추어 진행되는 발사자동시퀀스에 적용됨
○ 상단 발사관제시스템과 상단 탑재장비간 RS-422 통신 독립 : 양측간의 RS-422 통신은 그 림(15)와 같이 RS-422/Optic 변환기를 이용하여 독립적으로 운용될 수 있도록 구현하였다.
○ 네트워크는 2중화, 디스크릿/아날로그 입 출력 제어기는 3중화 : 그림 1의 시스템 구성도 와 같이 네트워크는 2중화가 되었으며, 그림 9와 그림 10의 TMR PLC 구성도에서 보는 바와 같
이 디스크릿/아날로그 입출력 제어기는 3중화되 었다.
○ 직류전원공급장치의 원격제어 : 상단 탑재 장비에 직류전원을 공급하는 장치는 그림 16과 같이 발사관제소 EW(Engineering Workstation) 에 구현되어 정상적으로 전원공급장치를 제어 및 모니터링하였다.
발사관제소 직류전원공급장치 제어화면
발사대 장비실에 위치한 직류전원공급장치 광케이블(4km)
LAN/GPIB Gateway GPIB 케이블
그림 16. 상단 탑재장비용 전원공급장치 제어화면
그림 17은 상단 탑재장비를 위한 직류전원공 급장치의 부하 소모전류 추이를 나타낸 것으로서 발사준비 단계에 따라 부하 소모전류의 편차가 크므로 직류전원공급장치에는 출력전압을 자동 조정할 수 있는 기능이 필수적임을 알 수 있다.
PDU 및 TCU 전원공급 시작 (0.79A)
상태점검 (15.99A)
Standby (6.4A)
최종작업시작 (7.04A)
PLO 구간 (16.04A)
그림 17. 직류전원공급장치 부하 소모전류 추이
5. 결 론
지난 2009년과 2010년 2회 비행시험을 수행한 나로호는 나로우주센터에서 발사준비 및 발사작 업이 진행되었다. 발사관제시스템은 우주센터의 발사패드에 총조립된 상태로 장착된 발사체에 대 한 발사작업을 위하여 발사체, 발사대, 추진지상 공급계 등 외부시스템에 대한 명령을 전달하고 데이터를 실시간 모니터링하여 발사가 당초 계획 대로 이루어지도록 한다. 발사관제시스템의 구 성 요소인 상단 발사관제시스템은 나로호 상단에 대한 지상 발사작업을 제어 및 감시할 수 있도록 개발되었으며 나로호 비행시험을 통해 발사준비 프로세스 자동 및 수동처리, RCS 충전, 상단 온 도환경상태 감시 등의 요구 기능들이 모두 설계 기준에 부합하는 것으로 확인되었다. 상단 발사 관제시스템 개발 및 나로호 발사운용을 통해 확 보된 다양한 기술적 경험과 분석 자료들은 향후 한국형발사체 발사관제시스템 개발에 있어 중요 한 토대가 될 것으로 사료된다.
참 고 문 헌
1. F.Byrne, G. V. Doolittle, R. W.
Hockenberger, "Launch Processing System", IBM J. RES. DEVELOP, pp.75-83
2. Jean-Louis Dega, "The Redundancy Mechanisms of the Ariane 5 Operational Control Center", IEEE Proceedings of FTCS-26, 1996, pp.382-386
3. 서진호,신명호,홍일희,이영호, “KSR-III 발사시험을 위한 지상제어계측시스템
운용결과”, 한국항공우주학회 추계학술발표회 논문집(II), 2003, pp.1179-1182
4. 문경록,안재철,장종태,정일형,서진호,라승호,
“KSLV-I 발사관제시스템 개요 및 구축 현황”, 제11회 우주발사체 심포지움 논문집, 2010, pp.298-305
5. Jin-ho Seo, et al, "Development of
Preparation Automated Control System for Upper Stage of Korea Space Launch Vehicle-I", IAC, 2007, D2.I.04