JESK
http://jesk.or.kr eISSN:2093-8462Driving Performance of Adaptive Driving Controls using Drive-by-Wire Technology for
People with Disabilities
Younghyun Kim, Yongchul Kim
Rehabilitation Science and Technology, Daegu University, Gyeongsansi, 38453
Corresponding Author Yongchul Kim
Rehabilitation Science and Technology, Daegu University, Gyeongsansi, 38453 Mobile : +82-10-9686-4240
Email : [email protected]
Received : March 05, 2015 Revised : January 04, 2016 Accepted : January 15, 2016
Copyright@2016 by Ergonomics Society of Korea. All right reserved.
○ccThis is an open-access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://
creativecommons.org/licenses/by-nc/3.0/), which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Objective: The purpose of this study was to develop and evaluate high technology adaptive driving controls, such as mini steering wheel-lever system and joystick system, for the people with physical disabilities in the driving simulator.
Background: The drivers with severe physical disabilities have problems in operation of the motor vehicle because of reduced muscle strength and limited range of motion.
Therefore, if the remote control system with driver-by-wire technology is used for adaptive driving controls for people with physical limitations, the disabled people can improve their quality of life by driving a motor vehicle.
Method: We developed the remotely controlled driving simulator with drive-by-wire technology, e.g., mini steering wheel-lever system and joystick system, in order to evaluate driving performance in a safe environment for people with severe physical disabilities. STISim Drive 3 software was used for driving test and the customized Labview program was used in order to control the servomotors and the adaptive driving devices. Thirty subjects participated in the study to evaluate driving performance associated with three different driving controls: conventional driving control, mini steering wheel-lever controls and joystick controls. We analyzed the driving performance in three different courses: straight lane course for acceleration and braking performance, a curved course for steering performance, and intersections for coupled performance.
Results: The mini steering wheel-lever system and joystick system developed in this study showed no significant statistical difference (p>0.05) compared to the conventional driving system in the acceleration performance (specified speed travel time, average speed when passing on the right), steering performance (lane departure at the slow curved road, high-speed curved road and the intersection), and braking performance (brake reaction time). However, conventional driving system showed significant statistical difference (p<0.05) compared to the mini steering wheel-lever system or joystick system in the heading angle of the vehicle at the completion point of intersection and the passing speed of the vehicle at left turning. Characteristics of the subjects were found to give a significant effect (p<0.05) on the driving performance, except for the braking reaction time (p>0.05). The subjects with physical disabilities showed a tendency of relatively slow acceleration (p<0.05) at the straight lane course and intersection. The steering performance and braking performance were confirmed that there was no statistically significant difference (p>0.05) according to the characteristics of the subjects.
Conclusion: The driving performance with mini steering wheel-lever system and joystick control system showed no significant statistical difference compared to conventional system in the driving simulator.
Application: This study can be used to design primary controls with driver-by-wire technology for adaptive vehicle and to improve their community mobility for people with severe physical disabilities.
Keywords: Primary driving controls, Driving simulator, Drive-by-Wire
1. Introduction
According to statistical data of Road Traffic Authority (KoRoad), over 28 million people had driver's license based on 2012, and the population aged 20~younger than 70 were 33 million out of the total population (Statistcs Korea, 2012). Driver's license retention ratio of driver's license acquirable age was 84%. Among the registered 2.5 million people with physical disabilities (Employment Development Institute, 2012), the number of disabled people having driver's license was 136,000 (Road Traffic Authority, 2012).
Except people with disabilities such as visual impairment, intellectual impairment, autism, mental impairment and epilepsy who can have some difficulties in driving, about 2 million people can be potential owner drivers. However, only 9.5% of them have driver's license. Compared to normal people, they show just only 11% of driver's license retention ratio.
Upon looking into the standard of driver's license conditions revised in 2013, and the vehicles used for functional test and road test for people with disabilities, they can sit for the functional test or road test using the vehicles with devices to complement their impaired upper and lower limbs' functions including auto transmission, manual acceleration pedal, manual brake, left foot accelerator, right direction indicator or steering wheel turning device, and the vehicles manufactured and approved suitable for disabled people's physical disabilities. Especially, a vehicle manufactured and approved suitable for the physical disabilities of the disabled people is called specially manufactured vehicle for those who are admittedly cannot drive normally like they cannot manipulate steering apparatus or other devices as they wish. Actually, the relevant rule specifies that they can sit for the driver's license test with their specially manufactured vehicle suitable for themselves (Road Traffic Act, Articles 54, 61 and 70, 2013).
Although most Korean driver's license test courses are equipped with adaptive driving controls for people with relatively light physical disabilities, such as manual acceleration pedal, manual brake, left side acceleration pedal, right side direction indicators and steering wheel turning device, there is no driver's license test course equipped with adaptive driving controls for people with severe physical disabilities. Therefore, it is almost impossible for people with severe physical disabilities to sit for driver's license test using a vehicle modified for their own body status by spending lots of money under the uncertain situation of obtaining driver's license (Oh, 2010).
In the developed countries including the U.S., Canada, Germany and France, various adaptive driving controls, such as joystick system and mini steering wheel-lever system for people with severe physical disabilities who have limitations in muscle strength and joint movement, as well as devices to complement impaired physical functions, were developed. In this manner, those countries make people with a variety of disabilities drive (Jung and Kim, 2012). People with severe physical disabilities need more special adaptive devices like electronic drive-by-wire system. Because such a special device is very expensive, compared to general adaptive driving devices, it is suitable for the people with severe physical disabilities whose muscle strength severely lacks or the range of motion is limited. Most people with severe physical disabilities using the drive-by-wire system use both hands to drive: They control steering of a vehicle remotely by moving the mini steering wheel located close to their body with one hand, and control vehicle's acceleration and braking remotely with movement of the lever type device with the other hand. If a person with severe physical disabilities can use only one hand, he/she can control steering and acceleration and braking with movement of the joystick located close to their body with one hand, namely upward, downward, left and right movements (Electronic Mobility Control, Drive-Master, Mobility Engineering and Development Inc., Paravan GmbH).
Concerning the adaptive driving controls to which an electronic control system is applied, a suitable adaptive driving device is selected through physical capability evaluation of the people with severe physical disabilities, and they receive driving training.
For people with severe physical disabilities, relatively more driving training period is required, and therefore they are likely to be exposed to many accidents during the training using a real vehicle. More systematic analysis on the electronic driving system under the safer simulator environment is needed, because few studies on the mini steering wheel-level system and joystick system commercialized and used a lot by people with severe physical disabilities are found.
Existing studies on the usability evaluation of adaptive driving controls for disabled people are mostly related with brake reaction time concerned with sudden braking in an emergency situation in terms of the most important performance. Therefore, many studies on such a field have been conducted (Richter & Hyman, 1974; Koppa, 1980; Reger et al., 1981; Peters, 2001; Fowler, 2010).
For driving performance related with steering, steering performance is assessed through an analysis of such items as maintaining lane or lane error (Peters, 2001; Fowler, 2010). A comparative experiment is carried out targeting disabled people and normal people to verify that the disabled people can safely drive like normal people using the adaptive driving controls (Koppa, 1990).
This study developed an electronic mini steering wheel-lever system and a joystick system for people with severe physical disabilities, and aims to lay the foundation for quality of life improvement through driver's license acquisition and owner-driving through comparative evaluation with conventional vehicle's driving devices and steering and acceleration and braking performance between disabled people and normal people.
2. Method 2.1 Subjects
Major variables affecting driving performance can include the effects by the type of adaptive driving controls and the effects of driver's characteristics. This study considered driving experience in relation with driver's characteristics and whether a driver has disabilities. To check the electronic control system's drive-by-wire adaptive driving device performance, this study divided the subjects into three groups as follows in order to carry out an evaluation experiment: Group A with driver's license without disabilities (ten people), Group B without driver's license and without disabilities (ten people) and Group C that cannot drive currently without proper adaptive driving controls, due to disabilities (ten people). Table 1 shows the status of the subject groups and characteristics.
The subjects with disabilities (Group C) had cerebral palsy, stroke and spinal cord injury (SCI) as shown in Table 2, and five subjects acquired driver's license before an accident. To select adaptive driving controls suitable for driving possibility, a manual muscle test (MMT) was implemented. To the subjects that can use only one hand, a joystick remote system was applied, and a mini steering wheel-level system was applied to the subjects who can use both hands. To evaluate visual perception capability required for driving performance of brain-disabled people (Lee et al., 2002), this study evaluated using a visual perception test tool, MVPT (motor free visual perception test), and mostly they were revealed to belong to normal range.
2.2 Experimental setup
2.2.1 Hardware configuration of driving simulator
Because an evaluation of people with severe disabilities by applying electronic drive-by-wire adaptive controls (devices) to a real Table 1. Characteristics of subjects
Group A Group B Group C
Age (Average) 26.4±1.9 22.7±1.7 37.5±9.3
Sex M 50% 50% 100%
F 50% 50% 0%
vehicle costs a lot, and difficulties arise in terms of safety (Kim & Kim, 2012), a simulator for vehicle driving was built for them to conduct test driving in the virtual environment. The vehicle's body was manufactured by cutting middle-sized passenger car up to B pillar, and the original kinematics structure, such as steering device and pedal device, was maintained. The vehicle was designed to easily apply the electronic adaptive driving controls for people with severe physical disabilities developed in this study to an actual vehicle in the future (Figure 1). Through the electronic power supply device, peripheral manipulation devices such as left and right signal device and wipers can be manipulated. Inside of the vehicle's bonnet, a PC for the simulator and a PC for actuator control were installed. For the actuator of steering device, rotation motion can be delivered by gearing vehicle's steering wheel axis and motor axis. The control pedal is pressed through lever arm, when the actuator of the pedal device is operated in the clockwise direction, and the pedal is pressed by pulling the accelerator pedal inward through wire, when the actuator is operated in the anticlockwise direction. To give an order of motor operation, a Labview 2011 (National Instruments, USA) program and Table 2. Clinical evaluation results and adaptive driving control devices of disabled group C
No. Disability MVPT MMT Adaptive driving devices
1 Cerebral palsy 33 Both hands normal but low coordination Joystick
2 Stroke 20 Right hands normal Joystick
3 Stroke 31 Left hands normal Joystick
4 SCI (C5-6) 33 Right hands normal Joystick
5 Cerebral palsy 32 Right hands possible Joystick
6 SCI (T3-4) 30 Both hands normal Mini Steering - Lever
7 SCI (C5-6) 36 Both hands possible Mini Steering - Lever
8 SCI (T7-8) 31 Both hands good Mini Steering - Lever
9 SCI (C4-5) 35 Both hands good Mini Steering - Lever
10 SCI (T3-4) 36 Both hands normal Mini Steering - Lever
motion card (NI PCI-7390) were installed at the PC for control. As for display output device, a 120-inch high brightness screen was used with 16:9 ratio through a wide projector supporting HDMI. Concerning the program for driving performance, a straight road, a curved road and an intersection were designed in order to evaluate the performance of adaptive devices using STISIM Drive (System Technology Inc., USA) (Song and Kim, 2015).
2.2.2 Adaptive driving control devices with Drive-by-Wire system
The two electronic control drive-by-wire adaptive driving devices for people with severe physical disabilities developed in this study consist of a mini steering wheel-lever system and a joystick system. For the mini steering wheel-lever system, two hands are used for driving, and the system consists of a mini steering wheel operated remotely by one hand, and a lever for acceleration and braking operated by the other hand. Regarding the joystick system, it consists of a joystick that can move to two axes directions operated by one hand in terms of steering, and acceleration and braking.
(1) Mini steering wheel-lever driving system
For people with severe physical disabilities for whom conventional steering wheel is not suitable, this study developed a mini steering wheel-lever system as an adaptive driving device. To install the developed mini steering wheel-lever, a RAM mount holder that can hold the smart pad within a vehicle was used, and it was designed to fix the holder at location suitable for driving of user's various physical conditions. The diameters of the mini steering wheel are 8cm, 10m and 12cm, and can be changed, and rotation angle information is delivered to the PC for control through the installed encoder. The steering ratio of mini steering wheel and actual vehicle's steering wheel is 2:1, and the actual vehicle's steering wheel turns once, while the mini steering wheel turns twice (Figure 2).
The lever system was designed to press the brake pedal through a pedal control actuator, as the lever moves forward, and to press the accelerator pedal, as the lever moves backward (SAE J1903, 1997). The operation distance of the lever device is 10cm, and was designed as the same specifications as foreign commercial products. Meanwhile, the operation distance of accelerator pedal and brake pedal of the vehicle configured in the simulator was 10cm, respectively, and the response ratio of the lever system to actual vehicle was 1:2.
The lever system sends analog electric signal, and the signal is delivered to the PC for control through signal collection device.
The mini steering wheel is simply connected with bearing and encoder, and the encoder's counter signal is delivered to the PC for control. Based on the signal received from the LabVIEW program of NI Company, the steering and pedal devices of actual vehicle type hardware are operated (Figure 3).
(2) Joystick driving system
Because people with severe physical disabilities who can use only one hand cannot use the mini steering wheel-level system, the steering wheel and accelerator and brake pedals need to be controlled through a joystick. For a person who can move using an electric wheelchair to drive, this study manufactured adaptive driving controls with a joystick having the specifications used for electric wheelchairs generally. Although this study applied a hybrid joystick control method according to EMC Company's steering angle section, and a control method according to vehicle's speed proposed by Ostlund (1999), difficulties occurred in controlling steering. Therefore, this study proposed a new algorithm that complemented the two algorithms' merits, and developed an adaptive joystick.
The situations in which steering angle moves the most are parking and U-turn situations, because the steering wheel movement and vehicle's speed are closely related, when a person drives a vehicle generally. In such cases, the vehicle's speed is generally within 10km/h. General vehicle's speed upon right turning at an intersection is within 20km/h. Therefore, this study divided the range of joystick's motion into three areas, and developed algorithms controlling steering such as straight lane driving, curved lane driving, intersection driving and U-turn by applying the steering ratio change curve of the joystick-steering wheel as shown in Figure 4.
Lever signal : -31~31°
Pedal actuator position 0 (idle)
Pedal actuator run for acceleration (CW)
Angle > 3 or Angle < -3
T
F
Angle > 0
T
F
Pedal actuator run for brake (CCW)
Mini Steering signal
Angle > 0
T
F Rotational ratio (Mini: General=2:1)
Rotate steering wheel (CW)
Rotate steering wheel (CCW)
2.3 Experimental procedure
This study designed driving scenarios by each module, namely acceleration and braking performance, curved road driving performance and intersection passage performance, since simple road scenarios are necessary, if possible, in order to test the basic performance of vehicle driving (Fowler, 2010). All the roads' width was set as 3.5m, and vehicle's width as 1.6m, and real time road environment, vehicle's location, speed and operation device input values were recorded for driving data with 0.1 sec interval (Figure 5). The experiment participants drove all the scenarios using the operation devices in random sequence, and they were given time to adapt to the simulator environment through autonomous driving. They were also checked on whether simulator disease occurred. And then, three times of experiments were conducted, after two times of practice by each module.
2.3.1 Acceleration and braking performance test
The scenario for the acceleration and braking performance test of the electronic adaptive driving controls developed for people with severe physical disabilities required to increase vehicle's speed up to 80km/h upon road driving start on the two-lane road, maintain the speed, and stop as quickly as possible, if a stop sign is viewed on the center of the screen. The time spent to arrive at the target speed, and the time to completely operate the brake pedal from the stop event occurrence point were analyzed (Figure 6).
2.3.2 Curve performance test
The curved road driving performance test was carried out by dividing it into low speed (40km/h) and high speed (80km/h).
Four-lane road was configured in consideration of lane error (Figure 7). The test demanded the participants to maintain the target speed, and drive on lane 1, if possible. To evaluate the lane error, this study analyzed the error area (meters*seconds) in curved road driving.
2.3.3 Intersection test
The intersection driving test was carried out by dividing it into a left turn and a right turn. The road consisted of 6 lanes in consideration of lane error and intersection passage radius (Figure 8). Through voice information, the direction to pass was informed
at the next intersection, and the experiment participants were demanded to stop at the intersection, and then enter the lane 1 from the lane 1 for the left turn, and enter the lane 2 from the lane 2 for the right turn. This study analyzed the vehicle's lane error distance, vehicle's heading angle, and average speed of intersection passage at the passage completion point.
2.4 Data analysis
This study used a statistical analysis program, SPSS 20.0, to analyze the basic performance of a vehicle on three adaptive driving controls in the vehicle driving simulator (conventional steering wheel and pedal (Gs), mini steering wheel-level (MS) and joystick (JS)), and three groups (Group A: Group of normal people with driver's license, Group B: Group of normal people without driver's license and Group C: Group of people with disabilities).
To compare driving performance characteristics (acceleration and braking performance, curved road driving performance and intersection driving performance), which are dependent variables, with independent variables (adaptive driving controls and subject groups), two-way ANOVA was used. When p value is less than 0.05, this study defined there was statistical significance. If significance appears in the ANOVA, this study additionally carried out a statistical significance test among the groups using Turkey's test as a post-hoc test method.
3. Results
3.1 Acceleration and braking performance
Figure 9 shows the experiment result on the arriving time to target speed. As a result of two-way ANOVA, adaptive driving controls factors (p<0.05) and human performance factors (p<0.01) showed significant differences. According to the result of Tukey's post-hoc test, average arriving time to target speed increased 27.6% in using the joystick system, compared to the mini steering wheel system in the adaptive driving controls factors (p<0.05). In the human performance factors, average arriving time at the target speed increased 57.2% and 39.8% in the Group C of people with disabilities without driver's license, respectively, compared to the Group A of normal people with driver's license (p<0.01) and the Group B of normal people without driver's license (p<0.01). The Group C of people with disabilities tended to show they were cautious about accelerating the simulator vehicle overall.
Figure 10 shows the experiment result on the reaction time to braking to cope with an emergency situation. As a result of the two-Way ANOVA, statistically significant differences were not shown in both adaptive driving controls factors (p>0.05) and human
performance factors (p>0.05). There was no difference according to adaptive driving controls or the participant groups regarding average reaction time to braking.
3.2 Curve performance
The curved road driving performance at low speed of 40km/h was demonstrated through lane error area (Figure 11), and there was no significant difference in the adaptive driving controls factors (p>0.05), and there was a significant difference in human performance factors (p<0.01) as a result of two-way ANOVA. As a result of the Turkey's post-hoc test, average lane error area increased 17.8 times in the Group B of normal people without driver's license, compared to the Group A of normal people with
driver's license (p<0.05).
As for the curved road driving performance result at high speed of 80km/h, the lane error area was calculated equally as shown in the low speed curved road driving (Figure 12). As a result of two-way ANOVA, there was no significant difference in the adaptive driving controls factors (p>0.05), and there was a significant difference in the human performance factors (p<0.01). According to the result of Tukey's post-hoc test, average lane error area increased 17.7 times in the Group B of normal people without driver's license, compared to the Group A of normal people with driver's license (p<0.01).
3.3 Intersection performance
At the intersection, a left turn and a right turn were tested. This study set lane error distance, vehicle's heading angle at each completion point, and vehicle's average speed during the passing the intersection as dependent variables.
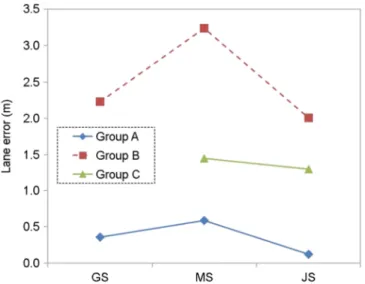
Figure 13 shows the lane error result at the left turn completion point. As a result of two-way ANOVA, there was no significant difference in the adaptive driving controls factors (p>0.05), and a significant difference was shown in the human performance factors (p<0.01). According to the result of Tukey's post-hoc test, the average lane error distance of the Group B of normal people without driver's license increased 6 times, compared to the group A of normal people with driver's license (p<0.01).
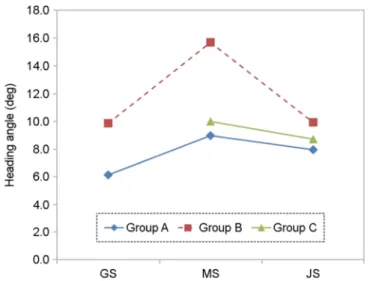
Figure 14 shows the result on the heading angle at the left turn completion point. As a result of two-way ANOVA, significant differences were shown in the adaptive driving controls factors (p<0.05), and also there were significant differences in the human performance factors (p<0.01). According to the result of Tukey's post-hoc test, general steering wheel's average heading angle dropped 30.8% at the left turn completion point, compared to the mini steering wheel system (p<0.05). It decreased 35.1% in the Group A of normal people with driver's license, compared to the Group B of normal people without driver's license (p<0.01).
Figure 15 shows the result on average driving speed upon a left turn. As a result of two-way ANOVA, there were significant differences in the adaptive driving controls factors (p<0.01), and also there were significant differences in the human performance factors (p<0.01). According to Tukey's post-hoc test, general steering wheel's average driving speed increased 57.3% upon left turn, compared to the joystick system (p<0.01). The mini steering wheel's average driving speed increased 37.7%, compared to the joystick system (p<0.01). Meanwhile, the average driving speed of the Group A of normal people with driver's license upon left turn decreased 12.3%, compared to the Group B of normal people without driver's license (p<0.05). The average driving speed of the Group C of people with disabilities without driver's license diminished 27.4%, compared to the Group B of normal people without driver's license (p<0.01).
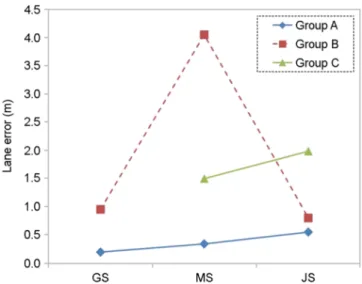
Figure 16 shows the lane error distance at the right turn completion point. As a result of two-way ANOVA, there was no significant
difference in the adaptive driving controls factors (p>0.05), and there were significant differences in the human performance factors (p<0.01). According to the result of Tukey's post-hoc test, the average lane error distance of the Group B of normal people without driver's license rose 4.4 times, compared to the Group A of normal people with driver's license (p<0.01).
Figure 17 shows the result of heading angle at the right turn completion point. As a result of two-way ANOVA, significant differences were shown in the adaptive controls factors (p<0.01) and the human performance factors (p<0.01), respectively.
According to the result of Tukey's post-hoc test, mini steering wheel system's average heading angle increased 66.4% upon right turn completion point, compared to the conventional steering wheel system (p<0.01). The joystick system's average heading angle increased 49.8%, compared to the conventional wheel steering system (p<0.05). It increased 54.3% in the Group B of normal
people without driver's license, compared to the Group A of normal people with driver's license (p<0.01). It increased 60.3% in the Group C of people with disabilities without driver's license, compared to the Group A of normal people with driver's license (p<0.01).
Figure 18 shows the result of average driving speed upon right turn. As a result of two-way ANOVA, no significant difference was shown in the adaptive driving controls factors (p<0.01), but significant differences were shown in the human performance factors (p<0.01). According to the result of Tukey's post-hoc test, the average driving speed of the Group A of normal people with driver's license diminished 16.3% upon right turn, compared to the Group B of normal people without driver's license (p<0.05).
The average driving speed of the Group C of people with disabilities without driver's license upon right turn fell 30.14%, compared
to the Group B of normal people without driver's license (p<0.01).
4. Conclusion
There were no statistical differences in the acceleration performance (arriving time to target speed, average passage speed upon right turn), steering performance (lane errors on the low speed curved road, high speed curved road and intersection upon left turn and right turn) and braking performance (reaction time to braking) in seven items between the mini steering wheel system and joystick system developed in this study in comparison with the conventional steering wheel system (p>0.05). However, the conventional steering wheel system improved, compared to the mini steering wheel system or joystick system, statistically significantly in vehicle's angle at the left turn/right turn completion point, and average speed upon passing through an intersection upon left turn (p<0.05).
Meanwhile, human performance factors, namely the experiment subject groups, affected driving performance the most. It was confirmed that whether a group had driver's license out of ten items had statistically significant effects on the nine items (p<0.05), except the item of reaction time to braking (p>0.05). The group of people with disabilities tended to accelerate relatively slowly in the straight lane acceleration, and intersection passage upon left turn/right turn (p<0.05). Actually, no statistically significant difference was shown in steering performance (lane errors on the low speed curved road, high speed curved road, and intersection upon left turn/right turn, and average vehicle's angle at the left turn/right turn completion point) and braking performance (reaction time to braking (p>0.05). Therefore, people with severe physical disabilities are judged to have the same driving performance as normal people, if they acquire driver's license through practices using proper adaptive driving controls.
The basic driving performance evaluation was carried out in the controlled environment. If driving performance evaluation is conducted using a real vehicle, instead of the driving simulator, the foundation through which more people with severe physical disabilities can drive will be laid. Such technologies and studies are conjectured to contribute to ensuring the mobility right and quality of life improvement for those who with severe physical disabilities.
Acknowledgements
This research was supported by the Daegu University Research Scholarship Grants.
References
Employment Development Institute, Survey on the employment status of the disabled in business, 2012, http://edi.kead.or.kr
Fowler, M.R., Testing and evaluation of a novel virtual reality integrated adaptive driving system, Master's thesis, University of South Florida, USA, 2010.
Jung, W. and Kim, Y., Development of smart driving system using iPod and its performance evaluation for people with severe physical disabilities in the driving simulator, Journal of the Ergonomics Society of Korea, 31(5), 637-646, 2012.
Kim, Y. and Kim, Y., Driving performance evaluation using bio-signals from the prefrontal lobe in the driving simulator, Journal of the Ergonomics Society of Korea, 31(2), 319-325, 2012.
Koppa, R.J., McDermott Jr, M., Raab, C. and Sexton, D.J., Human factors analysis of automotive adaptive equipment for disabled drivers, U.S. National Highway Traffic Safety Administration, 1980.
Koppa, R.J., State of the art in automotive adaptive equipment, Human Factors, 32(4), 439-455, 1990.
Lee, E.S., Park, S.W., Lee, B.S., Shin, O.S., Lee, J.H. and Kim, B.S., Evaluating driving ability of brain damaged subjects with MMSE and MVPT, Annals of Rehabilitation Medicine, 26(3), 268-272, 2002.
Oh, K.S., Problems and solutions in Korea driving system for the people with severe physical disabilities identified through literature review and Internet search, Journal of Vocational Rehabilitation, 20(2), 67-95, 2010.
Ostlund, J., Joystick-controlled cars for drivers with severe disabilities, VTI rapport 441A, Swedish National Road and Transport Research Institute, 1999.
Peters, B., Driving performance and workload assessment of drivers with tetraplegia: An adaptation evaluation framework, Journal of Rehabilitation Research and Development, 38(2), 215-224, 2001.
Reger, S.I., McGloin, A.T., Law, D.F., Spence, R.E. and Claus, C., Aid for training and evaluation of handicapped drivers, Bulletin of Prosthetics Research, 18(2), 35-39, 1981.
Richter, R.L. and Hyman, W.A., Research note: driver' brake reaction times with adaptive controls, Human Factors, 16(1), 87-88, 1974.
Road Traffic Act,Article 54, 61 and 70, 2013, http://law.go.kr
Road Traffic Authority, driver's License Examination Office, 2012, http://www.dla.go.kr
SAE J1903, Automotive adaptive driver controls, manual, 1997, Society of Automotive Engineers, Pennsylvania.
Song, J. and Kim, Y., Development and valuation of smart secondary controls using iPad for people with hemiplegic disabilities in the driving simulator, Journal of the Ergonomics Society of Korea, 34(2), 85-101, 2015.
Statics Korea, Survey of census population, 2012, http://www.kostat.go.kr
Author listings
Younghyun Kim: [email protected]
Highest degree: PhD, Department of Rehabilitation Science and Technology, Daegu University Areas of interest: Driver Rehabilitation, Rehabilitation Engineering
Yongchul Kim: [email protected]
Highest degree: PhD, Department of Mechanical Engineering, POSTECH
Position title: Associate Professor, Department of Rehabilitation Science & Technology, Daegu University Areas of interest: Biomechanics, Rehabilitation Engineering