Virtual Hill 및 Sink 개념 기반의 군집 로봇의 직선 대형 주행 기법
Cluster Robots Line formatted Navigation Based on Virtual Hill and Virtual Sink
강 요 환 1 , 이 민 철 † , 김 지 언 2 , 윤 성 민 1 , 노 치 범 1
Kang Yo-Hwan 1 , Lee Min-Cheol † , Kim Chi-Yen 2 , Yoon Sung-Min 1 , Noh Chi-Bum 1
Abstract Robots have been used in many fields due to its performance improvement and variety of its functionality, to the extent which robots can replace human tasks. Individual feature and better performance of robots are expected and required to be created. As their performances and functions have increased, systems have gotten more complicated. Multi mobile robots can perform complex tasks with simple robot system and algorithm. But multi mobile robots face much more complex driving problem than singular driving. To solve the problem, in this study, driving algorithm based on the energy method is applied to the individual robot in a group. This makes a cluster be in a formation automatically and suggests a cluster the automatic driving method so that they stably arrive at the target. The energy method mentioned above is applying attractive force and repulsive force to a special target, other robots or obstacles. This creates the potential energy, and the robot is controlled to drive in the direction of decreasing energy, which basically satisfies lyapunov function. Through this method, a cluster robot is able to create a formation and stably arrives at its target.
Keywords: cluster robot, navigation, line formation, potential field, virtual hill
1. 서 론
1)로봇기술의 성능향상과 기능의 다양화로 많은 영역에 서 로봇이 활용되면서 로봇이 인간의 작업을 대신하는 범위가 넓어지고 있다. 하지만 요구되는 성능과 기능이 늘어남에 따라 개별 기능과 성능을 위한 HW 및 SW 시 스템이 점층되면서 점점 시스템이 복잡해지고 운용도 어려워지는 문제가 발생하게 되었고 이를 해결하기 위 해 센서 융합기술이나 운용 기술의 부차적인 연구가 진 행되고 있다.
[1,2]
또 이러한 문제를 해결하는 다른 방법으 로 하나의 로봇에 모든 기능과 성능을 집중시키지 않고Received : Mar. 31. 2011; Reviewed : May 24. 2011; Accepted : Jun. 9. 2011
※ 본 연구는 한국과학기술원 국방무인화기술 특화연구센터를 통한 방위 사업청과 국방과학연구소 연구비 지원으로 수행되었습니다.
† 교신저자 : 부산대학교 기계공학부 교수
1 부산대학교 기계공학부 석사과정
2 영남이공대학 기계계열 전임강사
전문화된 기능과 성능을 가진 별개의 로봇에 역할을 분 담시켜 군집으로 처리 하는 방식이 연구되고 있다.
[3,4]
그 러나 이러한 군집 로봇이 자동 주행을 할 경우에는 한 대의 로봇에서 나타날 수 있는 장애물이나 주행 시 문제 점 발생 가능성이 로봇 수만큼 늘어나고 그와 더불어 로 봇간의 충돌 같은 동적 환경 변화의 어려움이 발생하게 된다. 이를 해결하고자 군집 로봇을 비전을 이용한 기법이나 Virtual Structure등을 이용해 특정 모형으로 대형을 형성하고, 형성된 대형의 군집로봇 전체를 마치 하나의 단일 로봇처럼 주행을 시키며 기존의 여러 주행 알고리즘을 적용하는 방법이 연구되었다.[5,6]
본 연구에서는 군집 로봇의 개별 로봇에 에너지 법을 근간으로 하는 주행알고리즘을 적용하여 군집의 대형 형성이 자동적으로 이루어지면서 동시에 군집 로봇의 목표물에 안정적으로 도달할 수 있도록 자율 주행 기법
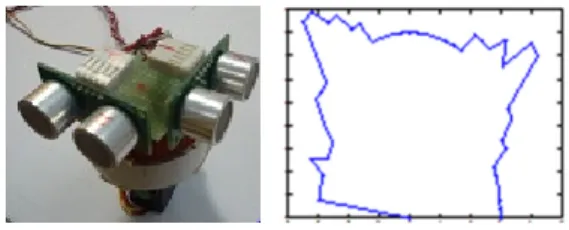
그림 1. 논문에서 사용하는 초음파 스캐너와 데이터 을 제안한다. 여기서 에너지 법이라 함은 공간상의 목표
나 다른 로봇 및 장애물에 인력과 척력을 적용하여 위치 에너지를 형성하고 에너지가 감소하는 방향으로 주행하 도록 하여 근본적으로 lyapunov 함수를 충족한다는 것 이며, 이를 통해 대형 형성과 목표물에 도달이 안정적이 면서도 자동적으로 이루어지도록 하는 것이다. 또한 센 서 및 환경인식 노이즈를 감안하여 환경 인식 데이터의 평균값을 lyapunov 함수에 적용하여 안정화된 알고리즘 과 동시에 환경인식 오차나 센서 성능 저하 등의 문제점 에 대해서도 강인하게 극복할 수 있도록 하였다. 그리고 물체의 상대적인 거리정보와 각도 정보만을 이용하기 때문에 주행 알고리즘도 간단하고 계산 처리양도 적어 프로세서가 빠르다.
일반적으로 군집로봇은 고가의 시스템으로 구성되어 있으나 본 연구에 적용된 시스템은 초음파 센서로써, 비 록 오차가 있지만 저전력, 저비용의 시스템을 구성할 수 있는 장점을 때문에 대부분의 이동 로봇이 충돌회피를 위한 말초 신경기능으로 사용하고 있다. 또 적외선 센서 를 이용하여 각 로봇에 ID를 부여하여 로봇간의 통신없 이 동료 로봇에 대한 위치인식을 가능하게 하였다.
초음파 센서는 비록 오차가 있지만 저가여서 대부분 의 이동 로봇이 충돌회피를 위한 말초 신경기능으로 사 용하고 있다. 따라서 본 논문에서는 기본적이면서도 최 저 사양인 로봇 센서를 기반으로 오차에 대해 강인하면 서 군집 로봇의 진형 유지와 목표물 도달을 안정적으로 동시에 가능하게 하는 알고리즘을 제안한다.
본 연구는 potential field method와 virtual hill을 이용 하여 로봇이 기초 센서를 기반으로 직선 대형을 유지하 고 목표지점에 도달하도록 하는 알고리즘을 제안한다. 제안된 알고리즘의 성능 평가를 위해 시뮬레이션과 로 봇을 이용한 실험으로 검증을 수행하였다. 2장에서는 로 봇 시스템의 모델링에 대해 정리하고 3,4장에서는 본 연 구에서 제안하는 알고리즘에 관한 설명을, 5장 에서는 제안된 알고리즘의 성능을 평가하기 위해 시뮬레이션과 로봇을 이용한 실험을 수행하며 6장에서는 연구결과를 정리하여 결론을 기술하였다.
2. Robot modeling
우선 본 연구에서 제안되는 알고리즘을 적용하기 위 해 필요로 하는 로봇의 요구조건을 본 절에서 로봇 모델 링을 통해 정리하도록 한다. 군집 로봇 형성을 위해 3대
이상의 이동 로봇이 군집을 형성하도록 모델링 한다. 그 리고 주행을 위해 환경인식은 서론에서 소개하였듯이 초음파 센서에 기반을 두도록 한다. 일반적인 자율 이동 로봇의 환경 인식에는 Vision이나 Laser, 초음파 등의 센 서가 이용되고 있다. Vision센서는 카메라로부터 입력되 는 2차원 영상정보의 영상처리를 통해 물체 인식과 2대 이상의 스테레오 기법을 통해 거리 정보를 동시에 획득 할 수 있지만, 영상처리 기법이나 스테레오 기법 등 많 은 연산이 요구되는 문제가 있다. 그에 비해 Laser scanner는 정밀하면서도 정확한 거리 정보를 측정할 수 있지만 가격이 고가라는 단점이 있다. 본 연구에서는 초 음파를 센서만을 사용하여 거리정보를 획득한다. 일반적 으로 초음파 센서를 이용하여 로봇 주변의 거리 정보를 획득 하는 방법으로는 로봇 본체 주변에 여러 개의 초음 파 센서를 부착하여 인식을 하는 방법과 Laser scanner 와 같은 메커니즘으로 그림 1과 같이 센서를 회전시켜 거리정보를 획득하는 방법이 있다.
[7]
본 연구에서는 알 고리즘의 성능 평가를 위한 시뮬레이션과 실험은 후자 의 모델을 사용한다.초음파 센서는 거리 정보만을 제공하지만 군집 로봇 의 주행을 위해서는 목표점이나 다른 로봇에 대한 인식 이 필요하다. 초음파 센서의 거리 정보만으로 다른 로봇 이나 목표점 혹은 장애물을 구분 하는 방법이 여러 연구 에서 개발되었다.
[8,9]
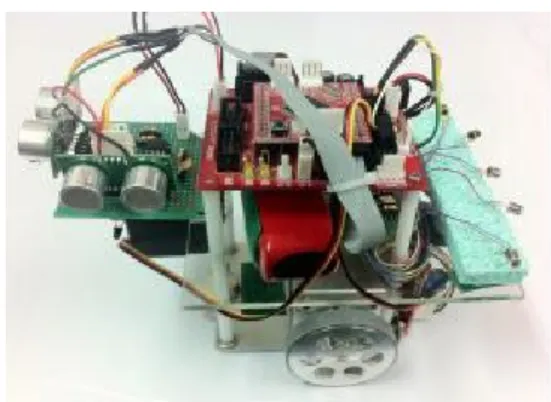
하지만 본 연구에서는 주행 알고리 즘의 개발에 초점을 두고 있으므로 로봇과 목표물 인식 은 IR센서를 이용한다. 그림 2와 같이 후방에 부착된 적 외선 발광부를 통해 로봇의 ID를 송출하고 로봇의 초음 파 센서 하부에 장착된 IR 수신 모듈을 통해 ID를 인식 할 수 있도록 설계하였다. 또 Goal에서도 발광부가 부착 되어 동료 로봇과 다른 적외선 ID를 주어 로봇이 Goal 에 대한 정보를 얻을 수 있게 하였다. 따라서 위와 같은 로봇 모델링을 통해 로봇은 3대 이상의 군집 로봇이 있 고, 각 로봇은 회전 스캐닝을 통해 주변 로봇이나 목표 물을 인식 할 수 있으며 주변 환경에 대해 각도 별 거리 를 측정 할 수 있다.그림 2. 실험용 마이크로 로봇
Potential field method를 사용하기 위해서는 공간상의 거리와 각도 등의 공간 정보와 어떠한 물체인지에 대한 물체 정보를 모두 필요로 하고 앞서 모델링한 방식으로 거리와 물체 정보를 설정할 수 있다. 하지만 물체 인식 에 대한 ID 인식 오차와 거리 측정에 대한 오차에 대해 강인성을 가지기 위해 입력 정보 데이터를 평균화시킨 다. 즉, 그림 1과 같이 초음파의 매 각도 별 나타나는 거 리정보를 파악되는 ID에 따라 데이터를 묶어서 평균을 구하는 방식을 제안한다. 물체로부터의 평균 거리 과 평균 각도 를 수식으로 표현하면 식(1)과 식(2)와 같이 표현된다.
/
( )
N m m ID
sequence
r
r = N ID ∑ (1)
/
( )
N m m ID
sequence
N ID θ
θ = ∑ (2)
여기서
N(ID sequence
)는 동일한 ID가 인식되는 모든 구간의 샘플 개수를 뜻하며
m / ID는 해당 ID로 인식될 때
의 데이터 번지를 의미한다. 따라서 다른 로봇이나 목표 물이 여러 각도에서 동일한 ID로 들어온다면 ID가 인식 되는 처음 위치부터 시작하여 마지막 ID까지 전체 sequence의 데이터를 합산하고 평균을 취한다. 이때 sequence 중간에 ID가 인식되지 않는 영역이 있더라도 최종 ID가 인식되는 지점까지 중간의 모든 데이터를 취 합하기 때문에 인식 오류나 초음파 센서의 거리 오류 등 에 대해서도 충분히 강인성을 가지도록 설정하였다.평균화 데이터가 획득되면서 포텐셜 필드의 척력 관 계식에 따라 양쪽 바퀴의 속도를 제어하는데, 이는 로봇 진행 방향에 대한 물체의 위치에 따라 2가지 방법 (0°~90°, 90°~180°)으로 나누어지고 그 식은 다음과 같다.
i) 0 <
θ < 900 0 2 (90 )
L
V V V k
r θ
⎛ ⎞
= + ⎜ ⎝ − ⎟ ⎠
(3)0 0 2 (90 )
R
V V V k
r θ
⎛ ⎞
= − ⎜ ⎝ − ⎟ ⎠
(4)i) 90 <
θ < 1800 0 2 ( 89)
L
V V V k r θ
⎛ ⎞
= − ⎜ ⎝ − ⎟ ⎠
(5)0 0 2 ( 89)
R
V V V k r θ
⎛ ⎞
= + ⎜ ⎝ − ⎟ ⎠
(6)여기서
V R
은 오른쪽 바퀴의 속도이고V L
은 왼쪽 바퀴 의 속도이다. V0
는 초기속도이고r과 θ
는 측정된 평균 거리와 평균 각도이다. 그림 3은 양쪽 바퀴의 속도값과 측 정된 물체의 거리와 각도를 모니터링하는 프로그램이다.그림 3. 측정된 데이터의 모니터링
3. Potential field method
이동로봇의 주행 알고리즘은 여러 가지 방식이 있지
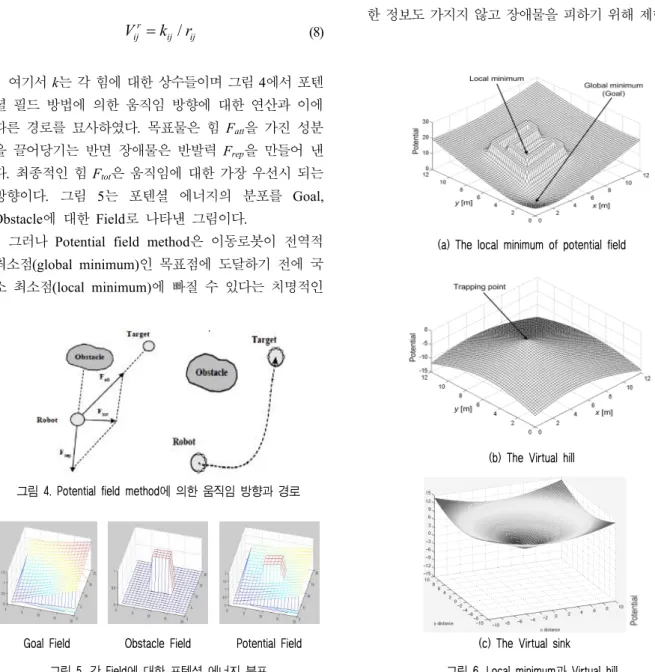
그림 4. Potential field method에 의한 움직임 방향과 경로
Goal Field
Obstacle Field
Potential Field 그림 5. 각 Field에 대한 포텐셜 에너지 분포
(a) The local minimum of potential field
(b) The Virtual hill
(c) The Virtual sink 그림 6. Local minimum과 Virtual hill 만 본 연구에서는 공간상의 위치에 따라 위치에너지를
임의로 생성하고 에너지가 감소하는 방향으로 주행토록 하는 Potential field method를 사용한다. Potential field method에서 에너지는 목표지점으로 이끌리는 인력(attr- active force)과 장애물로부터 반발되는 척력(repulsive force)의 합으로 구성된다.
[10]
i물체와 j물체 사이에 거리 를r ij
이라고 하고 만약 이 두 물체 사이에 인력이 작용한 다면 식 (7)과 같이 표현되고 척력이 나타나면 식 (8)와 같이 표현된다.1/ 2 2 a
ij ij ij
V = k r
(7)r /
ij ij ij
V = k r
(8)여기서 k는 각 힘에 대한 상수들이며 그림 4에서 포텐 셜 필드 방법에 의한 움직임 방향에 대한 연산과 이에 따른 경로를 묘사하였다. 목표물은 힘 F
att
을 가진 성분 을 끌어당기는 반면 장애물은 반발력F rep
을 만들어 낸 다. 최종적인 힘 Ftot
은 움직임에 대한 가장 우선시 되는 방향이다. 그림 5는 포텐셜 에너지의 분포를 Goal, Obstacle에 대한 Field로 나타낸 그림이다.그러나 Potential field method은 이동로봇이 전역적 최소점(global minimum)인 목표점에 도달하기 전에 국 소 최소점(local minimum)에 빠질 수 있다는 치명적인
단점을 가지고 있다. Local minimum이 발생하는 이유는 전체 포텐셜의 가중치에 의해 로봇의 경로를 구해내므 로 인력에 의한 포텐셜 에너지 보다 척력에 의한 포텐셜 에너지가 더 크게 될 때 로봇은 강한 척력의 포텐셜 에 너지 사이에 빠져 들어 목표 지점에 이르지 못하는 것이 다. 이를 회피하기 위해 그림 6과 같이 선행연구에서는 가상의 위치 에너지를 부가하여 가중치를 높이는 방법 을 채택하여 local minimum 문제를 해결하였다.
[11]
이렇 듯 가상의 에너지를 부가하는 방법인 virtual hill 개념과 이와 반대로 에너지를 최저로 만드는 virtual sink라는 개념을 본 연구에서는 사용하여 대형을 유지하고 장애 물을 회피하며 주행한다. 미지의 환경에서 로봇은 어떠 한 정보도 가지지 않고 장애물을 피하기 위해 제한된 범그림 9. 두 번째 follow 로봇의 potential field 생성법 위를 센싱하면서 주행한다.
4. Line formation
군집 로봇의 자율주행에서 다수의 로봇이 하나의 그 룹으로 행동하기 위해서 대형 유지는 필수이다. 대형 유 지의 접근방식으로 Leader-Following과 Behavioral-based 등이 있다.
[12]
그림 7과 같이 군집 로봇을 일렬로 배치하는 Virtual hill을 생성시키면 대형이 직선으로 형성됨과 동시에 로 봇간의 간격도 인력과 척력이 나타나 거리 유지가 형성 되어 자동적으로 대형 유지 및 자율 주행이 이루어지게 된다. 이러한 virtual hill을 생성하여 Leader-Following 기법을 이용한 알고리즘을 본 절에서 제안한다.
로봇들과 goal이 혼재된 상황에서 로봇은 goal의 ID 를 획득할 때까지 random 주행하고 센서를 통해 전방의 물체까지 각도 별 상대 거리와 물체의 ID가 파악이 된다 면, 직선 대형 형성을 위한 상황 별 개별 로봇의 주행은 3가지 경우에 대해 주행 법칙을 만들 수 있다. 첫 번째 경우는 로봇의 주변엔 다른 로봇이 파악되지 않고 목표 점만 나타났을 경우와 다른 로봇 1대와 목표점을 동시에 검출할 경우, 마지막으로 다른 2대의 로봇을 검출할 경 우이다. 각 경우 별 주행 법칙은 다음과 같다.
그림 7. Line formation을 위한 virtual hill 생성
4.1 목표점만 감지할 경우
로봇의 스캐닝 시 다른 로봇은 감지하지 못하고 goal 만 인식할 때 그 로봇은 leader가 되어 goal을 향해 주행 한다. 그리고 나머지 2대의 로봇들은 아래의 4.2와 4.3의 경우로 적용될 수 있다.
4.2 목표점과 1대의 로봇을 감지할 경우
만약 goal과 다른 로봇이 동시에 인지되었을 경우 두 로봇 사이에서 leader와 follower를 결정하여야 한다. 이
때 골과의 상대거리가 짧은 로봇이 leader로 결정되게 된다. 골과의 상대거리는 각각의 거리와 각도를 가지고 cosine 제 2법칙을 이용하여 계산할 수 있다. 거리가 짧 은 로봇이 leader가 되고 다른 한 대는 follower가 되게 된다. goal과의 거리가 멀어 follower가 된 로봇은 그림 8과 같은 virtual hill과 virtual sink를 생성한다. 하나의 virtual hill은 goal에 대한 방향으로 leader와의 거리만큼 을 띄워 배치하고 다른 Virtual hill은 leader와 대칭되는 각도와 Goal까지의 거리만큼 위치시켜 배치한다. 그리 고 leader를 virtual sink로 설정한다.
그림 8. 첫 번째 follow 로봇의 potential field 생성법
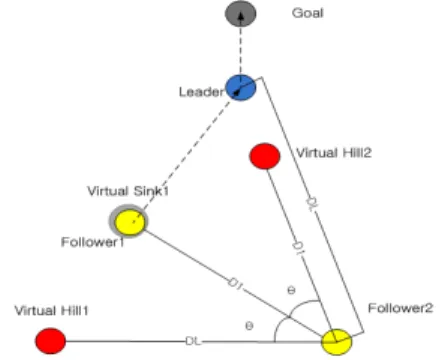
4.3 목표점과 2대의 로봇을 감지할 경우
로봇 2대 이상의 로봇이 탐지 되었을 경우 가까이 있 는 2대의 로봇에서 1차적인 판별을 수행한다. 2대의 로 봇 중 하나는 leader가 되고 다른 한 대에 대해서 우선 leader의 follower1이 될지 거리 비교를 통해 결정한다.
만약 follower1이 되면 4.2절에서의 방식으로 추종을 시 작한다. 만약 follower2가 되는 상황이 된다면 그림 9와 같이 hill을 생성되도록 한다. 이때 leader 로봇이 아닌 follower1을 virtual sink로 설정하여 목표추종을 하고 potential field 생성을 위해 하나의 virtual hill은 leader 방향으로 follower1까지 거리만큼 위치시킨다. 또 다른
virtual hill은 virtual sink의 반대 방향으로 앞서 설정한 사이각과 거리만큼 대칭되도록 설정한다.
그림10 은 virtual hill의 생성에 대한 알고리즘을 순서 도로 정리한 것이다.
그림 10. 직선 대형 생성 알고리즘 순서도
5. Experiments
본 장에서는 제안된 알고리즘의 성능평가를 위해 시 뮬레이션과 로봇을 이용한 실험을 수행한다.
5.1 Simulation test
본 연구에서 제안된 알고리즘을 구현할 경우 발생할 수 있는 환경 변수로는 다른 로봇이나 goal에 대한 인식 하는 과정에서 ID 신호를 송출하는 주기와 ID신호를 인 식할 수 있는 범위가 하나의 요소가 된다. IR신호를 이 용할 경우 노이즈나 반사등에 의해 넓은 영역에서 ID가 검출되거나 혹은 ID를 인식하지 못하는 경우가 발생하 지만 이는 2장의 로봇 모델링에서 제안하였듯이 데이터 의 평균값으로 설정하므로 강인성을 유지토록 제안하였 다. 또 다른 환경 변수로는 초음파 측정 정도와 초음파 거리 측정시 scanning 각도 분해능이 하나의 변수가 되 며 마지막으로 이러한 환경 인식과정의 빈도가 변수가
될 수 있을 것이다. 이러한 변수들 중 초음파 측정 정도 는 입력 변수의 데이터화 처리과정 중 평균화를 수행하 여 극복이 될 것이다. 제안된 알고리즘의 성능 평가를 위한 시뮬레이션 구현은 환경 인식을 위한 scanning 각 도 분해능과 초음파 센서의 정도 변화 및 환경 인식 간 격 조정에 변화를 주어 수행하였다. 시뮬레이션 평가는 구현 로봇의 실제 크기와 로봇의 주행 성능 및 초음파 센서의 범위를 그대로 적용하였고, 공간의 크기는 4m x 4m로 설정하여 matlab에서 수행하였다.
그림 11은 시뮬레이션 구현과정을 보여주고 있다. 그 림11(a)는 공간상에 임의 배치된 3대의 로봇과 goal을 보여주며 각각의 로봇에서 인식되는 초음파 환경이 색 깔 별로 그림과 같이 획득되는 것을 보여준다. 그림 11(b)는 초음파 scanning 각도 분해능마다 로봇이 직선 대형을 형성하며 목표점에 도달하는 과정을 보여준다.
그림 12(a)는 로봇이 주변 환경을 인식을 위해 초음파 scanning 각도 분해능과 초음파 센서의 측정 정도에 따 른 도달 시간을 보여준다. 결과를 보면 1°, 3°, 5° 까지는 목표점까지 주행이 성공함을 확인 할 수 있다. 하지만 분해능이 떨어짐에 따라 도달하는데 까지 걸리는 시간 은 점차적으로 증가되는 것을 알 수 있다. 또 다른 결과 는 초음파 센서의 측정 정도가 1mm일 때 보다 10mm 일 경우가 더 빨리 goal에 도달하는 것을 확인할 수 있 었다. 이는 potential energy 결정이 거리에 기본을 두고 있고 10mm로 양자화가 되어 있어서 일부 구간에서는 반올림된 크기의 에너지 변화량만큼의 속도가 나타나서 발생한 결과로 분석된다. 그림 11(b)는 주행 중 환경인 식 시간 간격에 따른 주행성을 보여주는 결과이다. 주행 중 scanning하는 시간 간격을 2s에서 400ms까지 작아져 도 목표 도달이 성공적이었고 400ms 보다 더 빨리 스캐 닝 할 때는 목표점 추종까지 걸리는 시간이 너무 많이 걸리거나 오히려 실패하는 경우가 발생함을 볼 수 있다.
이는 과도한 계산과 동시에 변동성이 크게 나타난 것이 원인으로 분석된다.
5.2 Experimental test
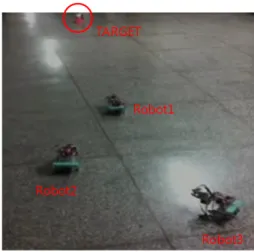
앞서 제안된 알고리즘 성능을 3대의 마이크로 로봇을 이용하여 실내 환경과 실외 환경에서 실험적으로 평가 하였다. 로봇의 사양은 표 1과 같다. 그림 13은 초기상태 의 사진으로 3대의 로봇이 GOAL의 위치를 나타내고 있 고 그림 14의 로봇이동 경로는 실제 실험결과를 동영상 으로 촬영한 후 개략적으로 도시화 한 것이다. 그리고
(a) 출발 전 초기 상태와 로봇이 인식하는 초음파 환경
센서 각도분해능 1˚와 거리분해능 1mm, 10mm에서의 주행
센서 각도분해능 3˚와 거리분해능 1mm, 10mm에서의 주행
센서 각도분해능 5˚와 거리분해능 1mm, 10mm에서의 주행
센서 각도분해능 7˚와 거리분해능 1mm, 10mm에서의 주행 (b) 직선 대형을 형성하며 Goal까지 가는 과정
그림 11. Simulation test
0 1 2 3 4 5 6 7 8 9 10
0 50 100 150 200 250 300 350 400
Arriv ed T ime(s )
Sensing Angular Resolution
1mm 10mm Distance Resolution
(a) 초음파 scanning 각도 분해능에 따른 도달 시간
(b) 초음파 scanning 간격에 따른 도달 시간 그림 12. 조건별 시뮬레이션 실험 결과
분류 내용
로봇의 수 3
로봇크기 150x200x200 (mm)
로봇의 최대 속도 0.2 m/s
초음파, 적외선센서 측정반경 180 degrees Scanning 주기 4.5 sec
구동부 SE-SM243 Stepping motor
Processor ATmega 128
초음파 센서의 종류 SRF-05
적외선 센서의 종류 EL-1KL2, ST-1KLA
전원부 11.1V, 850mAh 리튬 폴리머
배터리
표 1. Specification of real multi robot system
그림 5.6은 실내 환경에서 로봇을 이용해 실험 결과 영 상을 2초 간격으로 구현한 것으로 바닥면이 평탄하지 않 지만 무난히 직선을 형성하여 목표점에 도달하는 결과 를 보여주고 있다. 그러나 실외 환경에서는 필터 설계에 도 불구하고 적외선 센서가 태양과 같은 광학 노이즈에 매우 취약한 문제점이 있었다.
[Time : 0 sec] [Time : 2.5 sec] [Time : 5 sec]
[Time : 7.5 sec] [Time : 10 sec] [Time : 12.5 sec]
[Time : 15 sec] [Time : 17.5 sec] [Time : 20 sec]
[Time : 22.5 sec] [Time : 25 sec] [Time : 27.5 sec]
그림 15. 로봇의 주행 실험 모습 그림 13. 로봇의 주행 초기 모습
그림 14. 로봇의 주행 실험 결과 개략도
6. 결 론
본 논문에서는 군집 로봇의 개별 로봇에 주행 알고리 즘을 적용하여 군집의 직선 대형 형성이 이루어지면서 목표물에 안정적으로 도달할 수 있는 자율 주행기법을 제안, 확인하였다. 그리고 기본적이면서 최저 사양의 로 봇 센서를 이용하여 로봇의 말초 신경기능으로 사용함 으로 상대적인 거리정보와 각도 정보만을 이용하기 때 문에 주행 알고리즘이 간단하고 계산 처리양도 적어 프 로세서가 빨랐다. 또 센서 및 환경인식 노이즈를 감안하 여 환경인식 데이터를 평균값으로 처리함으로 환경인식 오차나 센서 성능저하 등의 문제점에 대해 강인함을 가 질 수 있었다. 시뮬레이션 실험을 통해 여러 가지 환경 변수에 대해 테스트 할 수 있었고 실제 실험에 적용한 결과 어두운 실내 환경에서 만족할만한 성능을 얻을 수 있었다.
비록 실제 구현 실험은 태양광과 형광등과 같은 광학 노이즈에 대해 적외선 센서가 매우 취약한 한계가 있었 지만 IR이 아닌 다른 ID 측정 센서를 통해 이 부분만 해 결한다면 시뮬레이션과 같은 강인성을 충분히 나타낼 것으로 생각된다. 향후 직선 대형이 아닌 여러 편대 모 형에 대한 추가 기법에 대해 연구가 필요할 것이다.
참 고 문 헌
[1] G. L. Foresti and C. S. Regazzoni, “Multisensor Data Fusion for Autonomous Vehicle Navigation in Risky Environment”, IEEE Transaction on Vehicular Technology, Vol.51, pp.1165-1185, Sep, 2002.
[2] H. Baltzakes, A. Argyros, and P. Trahanias,
“fusion of Laser and Visual Data for Robot Motion Planning and Collision Avoidance”, Conf. on Machine Vision and Applications, Vol.15, pp.92-100, 2003.
[3] Esha D, Nerurkar, Stergios I. Roumeliotis, and Agostino Martinelli, “Distributed Maximum A Posteriori Estimation for Multi-robot Cooperative Localization”, IEEE International Conference on Robotics and Automation, 2009.
[4] L. E. Parker, “Current state of the art in distributed autonomous mobile robotics”, Distri- buted Autonomous Robotic Systems, Vol.4, pp.3 –12, 2000.
[5] P. Urcola, L. Riazuelo, M. T. L´azaro and L.
Montano, “Cooperative navigation using environment compliant robot formations”, IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems, pp.2789-2794, Sep. 2008.
[6] Y. Q. Qin, D. B. Sun, N. Li and Y. G. Cen,
“Path planning for mobile robot using the particle swarm optimization with mutation operator”, Machine Learning and Cybernetics, Proceedings of 2004 International Conference on, Vol.4, pp.2473-2478, 2004.
[7] J. G. Lyu and M. C. Lee, “The map building based on ultrasonic sensors for a mobile robot”, Department of mechanical and Intelligent systems engineering PNU, 2004.
[8] K. Ohtani and M. Baba, “A Simple Identi- fication Method for Object Shapes and Materials Using an Ultrasonic Sensor Array”, IMTC 2006.
Instrumentation and Measurement Technology Con- ference, pp.2138-2143, apr, 2006.
[9] J. P. Qria, and A. G. Gonzalez, “Object recognition using ultrasonic sensors in robotic applications”, Proceed. of IECON'93, Hawai.
USA, 1993.
[10] P. Song and V. Kumar, “A Potential Field Based Approach to Multi-Robot Manipulation”, IEEE International Conference on Robotics and Automation 2002, Vol.2, pp.1217-1222, 2002.
[11] M. G. Park and M. C. Lee, “Artificial Potential Field Based Path Planning for Mobile Robots Using a Virtual Obstacle Concept”, 2003 IEEE/
ASME International Conference on Advanced Intelligent Mechatronics, Vol.2, pp.20 - 24. July.
2003.
[12] J. Spletzer, A. K. Das, R. Fierro, C. J. Taylor, V. Kumar, and J. P. Ostrowski, “Cooperative Localization and Control for Multi-Robot Manipulation”, IEEE/RSJ International Conference on Intelligent Robots and Systems, Vol.2, pp.631-636, 2001.
[13] Y. H. Kang, M. C. Lee, C. Y. Kim, S. M.
Yoon and C. B. Noh, “A Study about Cluster Robot of Line formatted Navigation Using Potential Field Method”, Conference on The Korea Institute of Military Science and Technology, June, 2011.
강 요 환
2009 한국해양대학교 제어자 동화공학과(공학사) 2009~현재 부산대학교 기계
공학부 석사과정 관심분야 : 군집제어, 메카트
로닉스
이 민 철
1983 부산대학교 기계공학과 (공학사)
1988 일본 쯔쿠바대학교 이공 학 연구과(공학석사) 1991 동대학 물리공학 연구과
(공학박사) 1991~현재 부산대학교 기계공학부 교수 관심분야 : 시스템 규명, 로봇 제어, 의료로봇제어
김 지 언
1999 부산대학교 기계공학부 (공학사)
2001 부산대학교 지능기계공 학과(공학석사)
2008~현재 부산대학교 기계 공학과 박사과정 2011~현재 영남이공대학 기계계열 전임강사 관심분야 : 의료로봇, 의료 메카트로닉스
윤 성 민
2010 부경대학교 기계공학과 (공학사)
2010~현재 부산대학교 기계 공학부 석사과정 관심분야 : 로봇제어, 의료로봇
노 치 범
2010 동의대학교 메카트로닉 스공학과(공학사) 2010~현재 부산대학교 기계공
학부 석사과정 관심분야 : 기계제어, 마이컴