노천 채광장의 적재-운반 작업을 위한 시뮬레이션 소프트웨어 개발
최요순1)*
New Software for Simulating Truck-Shovel Operation in Open Pit Mines
Yosoon Choi
*Abstract : This paper presents new software for simulating truck-shovel operation in open pit mines. The GPSS/H simulation language was used to develop a simulator, and Windows programing using Visual Basic.NET was carried out to create a graphical user interface that allows to generate input data files for the simulator, to run the simulator and to show simulation results. A case study showed that the software can determine the optimal number of trucks assigned to a truck-shovel operation system by considering different loading types (i.e., single-sided loading and double-sided loading). A sensitivity analysis revealed that effects of trucks’ initial dispatch intervals are not significant to the truck-shovel operation system rather than the number of trucks. It is expected that the method for interfacing GPSS/H simulation language and Windows programing can be widely used in the mining industry to develop new software for mining simulations.
Key words : Open pit mines, Truck-shovel operation, Simulation, GPSS/H, Software
요 약 : 본 연구에서는 노천 채광장의 적재-운반 작업을 시뮬레이션 할 수 있는 새로운 소프트웨어를 개발하였 다. 시뮬레이터 개발을 위해 GPSS/H 시뮬레이션 언어를 사용하였고, Visual Basic.NET을 이용한 윈도우즈 프로 그래밍을 수행하여 사용자가 그래픽 인터페이스를 통해 시뮬레이터에 입력될 파일을 생성하고, 시뮬레이션을 실행하며, 시뮬레이션 결과를 효과적으로 확인할 수 있도록 하였다. 개발된 소프트웨어를 사용하여 사례연구를 수행한 결과 적재장비의 공간 활용 유형에 따라 채광장에 투입되어야할 최적의 트럭 수를 결정할 수 있었다.
채광장에 투입되는 트럭의 수가 최적화되면 트럭들의 초기 배차시간 간격이 시스템의 효율에 미치는 영향은 크지 않은 것으로 나타났다. 본 연구에서 제안한 GPSS/H 시뮬레이션 언어와 윈도우즈 프로그래밍 기법의 연계 기술은 추후 광업 분야의 다양한 시뮬레이션 소프트웨어 개발을 위해 유용하게 활용될 수 있을 것으로 기대한다.
주요어 : 노천광산, 적재-운반 작업, 시뮬레이션, GPSS/H, 소프트웨어
2011년 6월 2일 접수, 2011년 7월 16일 심사완료 2011년 8월 17일 게재확정
1) 부경대학교 에너지자원공학과
*Corresponding Author(최요순)
E-mail; [email protected]; [email protected] Address; Department of Energy Resources Engineering,
Pukyong National University, Busan, Korea
서 론
수학적 분석 방법을 이용한 경영 관리(Operations Research, OR) 기술은 제 2차 세계대전 당시 레이더망 배치, 호송 선단 편성, 잠수함 수색활동 등 군사적 문제들을 과학적 인 체계적으로 분석하기 위해 등장하였다. 이후 OR 기 술은 제조업과 서비스업뿐만 아니라 농업, 수산업, 임업, 광업 등과 같은 1차 산업분야로도 확산되어 발전하였으 며, 오늘날 산업 전 분야에서 광범위하게 활용되고 있다.
특히, 광업 분야에서는 생산계획(production planning), 장 비선택 및 유지관리(equipment selection and maintenance), 광물처리(mineral processing), 중장기 개발계획 최적화 (long-term optimization for scheduling) 등의 과정에서 채광 시스템을 구성하는 다양한 장비와 인력들의 복잡한 상호작용을 이해하고, 작업 공정을 최적화하기 위해 OR 기술이 활용되고 있다(Topuz and Duan, 1989; Osanloo et al., 2008; Newman et al., 2010). 본 연구에서는 OR 기 술을 활용하여 노천 채광장의 적재-운반 작업을 시뮬레 이션 할 수 있는 새로운 소프트웨어를 개발하고자 한다.
최근까지 노천 채광장의 적재-운반 작업을 시뮬레이션 할 수 있는 소프트웨어가 많은 연구자들에 의해 개발되 었다(Hauck, 1979; Bonates, 1996; Temeng, 1997; Blackwell, 1999; Aksoy and Yalcin, 2000; Alarie and Gamache, 2002; Niemann-Delius and Fedurek, 2004; Oraee and Asi, 2004; Yan and Lai, 2007; Krause and Musingwini, 연구논문
Table 1. A comparison between GPSS/H and FORTRAN to implement a simulator (modified from Sturgul, 2000)
GPSS/H FORTRAN
Time to implement a simulator few days many months
Line of computer code 300-400 20,000-50,000
Ease of changing program trivial up to a week
Execution time <1 minute 3-4 hours
2007; Zhang, 2008; Ercelebi and Bascetin, 2009). 기존 의 연구에서 시뮬레이션 소프트웨어를 개발하기 위해 사 용한 접근 방법은 크게 두 가지로 구분할 수 있다. 첫째, GPSS/H(http://www.wolverinesoftware.com), GPSS World (http://www.minutemansoftware.com), SIMAN(http://www.
arenasimulation.com), SIMSCRIPT(http://www.simscript.com) 등의 전문적인 시뮬레이션 언어를 사용하는 방법이다.
전문적인 시뮬레이션 언어를 사용하면 OR 기술 분야에 서 개발된 다양한 기법들을 시뮬레이터(simulator) 개발 을 위해 활용할 수 있으며, 소프트웨어의 유지보수 단계 에서 시뮬레이터의 기능을 확장하는 것이 용이하다. 그 러나 전문적인 시뮬레이션 언어를 사용하기 위해서는 프 로그래밍에 대한 전문적인 지식이 필요하기 때문에 현장 의 광산 기술자들이 쉽게 활용하기 어려운 한계가 있다.
SIMAN과 같은 일부 시뮬레이션 언어는 사용자가 시뮬 레이터를 쉽게 개발할 수 있도록 그래픽 인터페이스를 제공하고 있으나, 이는 일반적인 시뮬레이터 설계 도구 로서 광업 분야에 활용될 수 있는 시뮬레이션 소프트 웨어 개발을 위해 특화된 기능을 제공하지 않는다. 둘 째, FORTRAN, C, C++, BASIC 등 일반적인 프로그래 밍 언어를 사용하여 시뮬레이션 소프트웨어를 개발하는 방법이다. 최근에 사용되고 있는 일반적인 프로그래밍 언어들을 대부분 윈도우즈 프로그래밍 방식을 지원하므 로 사용자 편의의 그래픽 인터페이스를 시뮬레이터와 함 께 개발하여 광산 기술자에게 제공할 수 있는 장점이 있 다. 그러나 전문적인 시뮬레이션 언어와 비교할 때 시뮬 레이터 개발시 많은 시간과 노력이 요구되며, 시뮬레이 터의 처리속도가 느린 것이 단점이다(Table 1).
본 연구의 목적은 노천 채광장의 적재-운반 작업을 시 뮬레이션 할 수 있는 새로운 소프트웨어를 개발하는 것 이다. 시뮬레이션 소프트웨어 개발을 위해 기존의 연구 에서 사용되었던 두 가지 접근 방법들을 상호 보완할 수 있도록 전문적인 시뮬레이션 언어인 GPSS/H와 일반적 인 윈도우즈 프로그래밍 언어인 Visual Basic.NET을 연 계(interfacing)할 수 있는 방법을 제안하고, 효율적인 시 뮬레이터와 사용자 편의의 그래픽 인터페이스 함께 갖춘 소프트웨어를 개발하고자 한다.
적재-운반 작업의 시뮬레이션 이론
노천 채광장에서는 많은 양의 폐석과 광석들이 상대적 으로 길고 가파른 경로를 통해 채광장 외부로 운반되며, 운반작업에 투입되는 비용은 일반적으로 전체 광산 운영 비용의 50% 이상을 차지한다(Hays, 1990; Bonates, 1996;
Temeng, 1997; Alarie and Gamache, 2002; Niemann-Delius and Fedurek, 2004; 최요순 등, 2007). 운반작업에는 트 럭, 철도, 컨베이어 벨트 등 다양한 장비들이 활용될 수 있으며, 그 중 트럭과 적재장비(shovel)로 구성된 적재- 운반 시스템(truck-shovel operation system)이 노천광산 현장에서 가장 일반적으로 활용되고 있다(Bonates, 1996;
Temeng, 1997; Cardu et al., 2004).
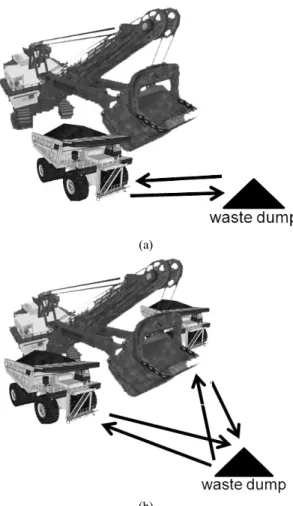
Fig. 1은 한 대의 적재장비, 한 곳의 폐석장(waste dump), 다수의 트럭들로 구성된 노천 채광장의 적재-운 반 시스템을 나타내는 개념도이다. 적재장비가 폐석을 트럭에 적재하면, 트럭은 폐석장으로 이동하여 폐석을 쏟아 버린 후 다시 적재장비가 위치한 곳으로 돌아온다.
적재장비는 한 번에 한 대의 트럭에 대하여 서비스를 제 공할 수 있다. 따라서 트럭이 적재지점으로 돌아왔을 때 적재장비가 다른 트럭에 대하여 서비스를 제공하고 있다 면, 적재지점으로 돌아온 트럭은 대기행렬(queue)에 합 류하여 적재장비의 활용이 가능해 질 때까지 기다려야 한다. Fig. 1(b)와 같이 적재장비가 좌우 측면 공간을 모 두 활용할 수 있는 경우에는 적재장비가 한 쪽 측면 공 간에서 작업을 수행하는 동안, 다른 트럭이 반대쪽 측면 공간으로 미리 접근하여 적재작업을 준비할 수 있다. 적 재-운반 작업이 지속되는 동안 트럭들은 적재지점과 폐 석장 사이를 지속적으로 왕복하며 시스템을 벗어나지 않 는다. 트럭에 적재되는 물질이 폐석이 아닌 광석일 경우 에는 적재-운반 시스템에서 폐석장은 광석 적치장(ore stockpile)이나 파쇄기(crusher)로 대체될 수 있다.
Suboleski(1975)는 노천 채광장의 적재-운반 시스템을 구성하는 적재장비와 트럭들의 상호작용을 이산적인 사 건(discrete event)들이 발생하는 시간을 이용하여 설명 할 수 있는 트럭 순환시간(Truck Cycle Time, TCT)을 다음과 같이 제안하였다.
(a)
(b)
Fig. 1. Conceptual view of a truck-shovel operation system.
(a) Single-sided loading. (b) Double-sided loading.
(1) 여기서 STL은 대기 열에서 나온 트럭이 적재장비까지 접근시간(Spotting Time at Loader), LT는 적재 작업시 간(Loading Time), TL은 폐석을 실은 트럭이 적재지점 에서 폐석장까지 이동하는 시간(Travel time of a Loaded truck), STD는 폐석장에 도착한 트럭이 폐석의 투하지점 까지 접근시간(Spotting Time at Dumping area), DT는 트럭의 폐석 투하 작업시간(Dumping Time), TE는 트럭 이 폐석장에서 적재지점까지 돌아오는데 걸리는 시간 (Travel time of an Empty truck), AD는 적재지점으로 돌아온 트럭이 적재장비의 활용이 가능해 질 때까지 대 기행렬에서 기다려야 하는 지연시간(Average Delay time) 을 의미한다.
트럭 순환시간을 구성하는 이산적인 사건들의 소요시 간은 다양한 요인들의 영향을 받아 결정된다. STL, STD, DT는 트럭 운전자의 작업 숙련도에 따라 달라질 수 있 으며, LT는 적재장비의 성능과 장비기사의 작업 숙련도 에 영향을 받는다. TL과 TE는 적재지점과 폐석장을 연 결하는 트럭의 운반경로에 따라 결정되며, 트럭 이동시 간의 단축을 위해서는 운반경로의 지형, 장비성능, 도로 표면 조건 등이 고려되어야 한다(Choi et al., 2009; Choi and Nieto, 2011). AD는 채광장에 투입되는 트럭의 수에 따라 달라질 수 있다. 적재-운반 시스템에 너무 많은 트 럭이 투입될 경우에는 적재장비의 서비스를 기다리는 트 럭의 대기행렬 길이가 길어지면서 AD가 증가할 수 있기 때문이다. 반면, 너무 적은 수의 트럭이 투입될 경우에는 AD는 단축될 수 있으나 트럭들이 적재지점과 폐석장 사 이를 이동하고 있는 동안 적재장비가 사용되지 않는 시 간(idle time)이 증가하므로 효율적인 시스템 운영이 어 렵다. 따라서 노천 채광장에서 적재-운반 작업을 효율적 으로 수행하기 위해서는 AD를 단축하면서 동시에 적재 장비의 활용률을 높일 수 있도록 시스템에 투입되는 트 럭의 수를 결정할 필요가 있다.
노천 채광장의 적재-운반 시스템에 투입될 트럭의 수 를 최적화하기 위한 방법으로 OR 기술의 대기행렬 이론 (queueing theory)이 적용될 수 있다. 대기행렬 이론은 서비스를 처리할 수 있는 개체수와 소요시간 등의 자료 를 기반으로 각각의 개체들이 서비스를 받기 위해 기다 려야 하는 시간을 계산하고, 서비스 시설의 적정 규모를 연구하는 이론이다(Sturgul, 2000). 대기행렬 이론을 노 천 채광장의 적재-운반 시스템에 적용하면 투입되는 트 럭들의 수에 따라 나타날 수 있는 대기행렬의 변화를 예 측할 수 있으며, 트럭이 대기행렬에 도착하는 빈도와 대 기행렬에서 발생하는 AD를 분석할 수 있다(Newman et al., 2010). 대기행렬 이론은 수학적 모델을 정의하여 적 재-운반 시스템에 적용될 수도 있으나, 트럭 순환시간을 구성하는 이산적인 사건들은 항상 일정한 빈도와 간격으 로 발생하는 것이 아니기 때문에 수학적 모델만으로는 시스템의 효율을 극대화할 수 있는 트럭 수를 결정하는 것이 어렵다(Sturgul, 2000). 따라서 수학적으로 정확한 해를 찾기 보다는 트럭의 수를 다양하게 고려하여 적재- 운반 작업을 시뮬레이션하고, 시뮬레이션 결과로부터 시 스템 운영의 경제성 등을 비교하여 최적의 트럭 수를 결 정하는 방법이 일반적으로 사용되고 있다.
GPSS/H 시뮬레이션 언어
본 연구에서는 노천 채광장의 운반-적재 시스템을 분
석할 수 있는 시뮬레이터를 개발하기 위해 전문적인 시 뮬레이션 언어인 GPSS/H를 사용하였다. GPSS/H는 다 양한 버전의 GPSS 시뮬레이션 언어 중에서 가장 발전된 버전이다(Sturgul, 2000). GPSS/H는 어셈블러(assembler) 언어로서 기계어의 명령과 일대 일의 대응 관계를 가지 며, 비절차적(nonprocedural) 언어이기 때문에 시뮬레이 션이 수행되는 동안 시스템의 상태를 나타내는 값들을 자동으로 저장/갱신하고 시뮬레이션이 끝날 때 그 값들 을 결과물로 제공한다. GPSS/H는 이산적인 사건들로 구 성된 실세계의 시스템을 효과적으로 모델링할 수 있으므 로, 노천 채광장의 적재-운반 시스템을 트럭 순환시간을 기준으로 시뮬레이션 하는데 유용하게 활용될 수 있다.
추가적으로 GPSS/H 시뮬레이션 언어가 가지는 장점들 은 다음과 같다(Sturgul, 2000).
(1) 프로그램의 논리를 이해하기 쉽다.
(2) 프로그램을 빠르고 간결하게 작성할 수 있다.
(3) 프로그램의 실행시 연산속도가 빠르다.
(4) PC에서도 이용이 가능하다.
(5) 광업 분야를 포함한 많은 산업분야에서 그 성능이 이미 검증되었다.
GPSS/H 시뮬레이션 언어는 GPSS/H Professional, Personal GPSS/H, Student GPSS/H의 세 가지 버전으로 구분된다 (http://www.wolverinesoftware.com/GPSSHProducts.htm).
이중 Student GPSS/H 버전은 교육용으로 제공되는 셰 어웨어(shareware) 버전으로서 무료로 사용이 가능하다.
Student GPSS/H 버전은 다른 버전들과 동일하게 GPSS/H 시뮬레이션 언어의 모든 기능을 제공하지만, 시뮬레이터 의 개발시 다음과 같은 제약이 있다.
(1) 하나의 시뮬레이터에서 GPSS/H 언어의 함수 사용 이 최대 125개까지 가능하다.
(2) 하나의 시뮬레이터에 사용될 수 있는 프로그래밍 코드의 길이는 최대 250줄까지 가능하다.
(3) 병렬처리는 최대 300 트랜잭션(transactions)까지 가능하다.
본 연구에서는 시뮬레이터의 개발을 위해 Student GPSS/H 버전을 사용하였다. Student GPSS/H 버전은 상업용 버 전들과 비교할 때 몇 가지 제약사항이 있으나, 노천 채광 장의 운반-적재 시스템을 시뮬레이션 하는데 있어서는 큰 문제가 되지 않기 때문이다. 또한, Student GPSS/H 버전을 사용할 경우 본 연구에서 개발한 시뮬레이션 소 프트웨어를 교육용 목적의 셰어웨어로서 사용자들에게 무료로 제공할 수 있다.
시뮬레이터 개발
본 연구에서는 노천 채광장의 적재-운반 시스템에 투 입되는 트럭의 수에 따라 상이하게 나타나는 시스템의 효율성을 비교/분석할 수 있는 시뮬레이터를 개발하였 다. 시뮬레이터 개발시 사용된 가정은 다음과 같다.
(1) 시스템은 한 대의 적재장비, 한 곳의 폐석장, 한 개 의 운반경로(적재지점-폐석장 왕복), 한 개의 대기 행렬, 다수의 트럭들로 구성되며, 적재-운반 작업 이 진행되는 동안 구성요소들은 시스템을 벗어나 지 않는다.
(2) 시스템에서 발생하는 사건들은 트럭 순환시간을 구성하는 요소들의 이산적인 흐름으로 표현될 수 있다.
(3) 트럭 순환시간을 구성하는 요소들의 시간은 현장 에서의 시간연구를 통해 측정될 수 있다. 측정된 값들은 통계적으로 정규분포를 따르며, 평균과 표 준편차를 산정할 수 있다.
(4) 폐석장에서는 트럭의 대기행렬이 생성되지 않는 다. 따라서 트럭 순환시간을 구성하는 요소들 가 운데 STD와 DT는 연속적인 사건으로 가정할 수 있으며 하나의 값으로 표현이 가능하다.
(5) 적재장비가 좌우 측면 공간을 모두 활용하여 적재 작업을 수행할 수 있는 경우에는 적재장비가 한 쪽 측면에서 작업을 수행하는 동안 대기행렬에 있던 다른 트럭이 적재장비의 반대쪽 측면으로 미리 접 근하여 다음 적재작업을 준비할 수 있다. 그러나 적재장비가 한쪽 측면 공간만을 활용할 수 있는 경 우에는 적재장비가 작업을 수행하는 동안 대기행 렬의 트럭들은 계속해서 기다려야 한다.
(6) 적재-운반 시스템의 효율성은 적재장비의 활용률, 대기행렬의 길이, AD, 경제성 등을 고려하여 평가 할 수 있다.
(7) 시뮬레이션은 충분한 기간을 고려하여 반복적으로 수행된다.
Fig. 2는 개발된 시뮬레이터의 입출력 자료들을 보여 준다. 시뮬레이터에는 투입될 트럭의 수(대), 트럭의 초 기 배차시간 간격(분), 적재장비의 공간 활용 유형, 현장 에서의 시간연구 자료, 하루 작업시간(분), 시뮬레이션을 반복적으로 수행할 작업일 수, 경제성 평가를 위한 인자 값들이 입력된다. 입력자료 가운데 현장에서의 시간연구 자료는 STL, LT, TL, STD와 DT의 합, TE의 다섯 가지 항목들로 구성되며, 각 항목은 평균(분) ± 표준편차(분)
Fig. 2. Input and output data for the simulator developed in this study.
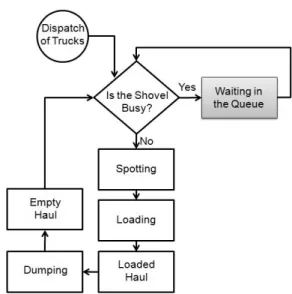
Fig. 3. Procedure for simulating truck-shovel operation (type: single-sided loading).
형식으로 표현된다. 경제성 평가를 위한 인자 값들로는 1회 적재-운반 작업으로 얻을 수 있는 이익(원), 적재장 비의 운영비와 적재장비 운전자의 인건비 등을 포함한 (트럭과 관련된 비용은 제외) 적재-운반 시스템 운영에 필요한 고정비(원/일), 트럭 한 대당 운영비(원/일), 트럭 운전자 인건비(원/일)가 필요하다. 시뮬레이터가 출력하 는 값들은 시뮬레이션 기간 동안 시스템에서 발생한 하 루 평균 적재-운반 작업 횟수, 적재장비의 평균 활용률 (%), 트럭 대기행렬의 최대 길이(대), 트럭 대기행렬의 평균 길이(대), 대기행렬에서 발생한 AD, 적재-운반 작 업을 통해 시스템에서 발생한 수익의 하루 평균치(원/일) 로 총 6가지이다.
적재장비의 공간 활용 유형이 한쪽 측면 공간만을 활 용하는 것으로 선택되었을 때 시뮬레이터가 자료를 처리 하는 절차는 Fig. 3과 같다. 시뮬레이션이 시작되면 시뮬 레이션 시계(simulation clock)가 작동되며, 시뮬레이터 에 입력된 값들을 기준으로 트럭들이 시스템에 순차적으 로 투입된다. 투입된 트럭들은 적재장비의 상태를 먼저 확인한다. 적재장비의 사용이 가능할 경우에는 적재장비 로 바로 접근하여 작업을 시작하며, 이후 실차(loaded truck)의 이동, 폐석의 투하, 공차(empty truck)의 이동의 사건들이 순차적으로 발생한다. 적재장비가 다른 트럭에 대한 서비스를 진행하고 있어서 사용이 불가능할 경우에 는 트럭은 적재장비로 바로 접근하지 못하고 대기행렬로 합류하여 기다려야 하며, 이때 발생한 트럭의 AD가 시 뮬레이터에 기록된다. 대기행렬의 트럭들은 선입·선출법 (First In First Out, FIFO)에 따라 먼저 대기행렬에 합류 한 트럭이 적재장비의 서비스를 먼저 받을 수 있다. 한 번의 적재-운반 사이클을 마치고 다시 적재지점으로 돌
아온 트럭은 적재장비의 상태를 다시 확인하여 적재장비 로 접근하거나 대기행렬에 합류한다.
시뮬레이터는 입력된 시간연구 자료를 기반으로 시스 템에서 발생하는 사건들의 소요시간을 정규분포에 따라 확률적으로 생성(generation)하며, 생성된 시간들은 시뮬 레이터 시계에 반영된다. 시뮬레이션은 입력된 정해진 기간(즉, 1일 작업시간 × 시뮬레이션을 수행할 작업일 수)까지 반복적으로 수행되며, 시뮬레이션의 반복 횟수 가 증가함에 따라 확률적 분포를 따르는 값을 이용한 시 뮬레이션 결과가 수학적으로 계산한 값과 유사해진다(Sturgul, 2000). 시뮬레이션이 수행되는 동안 시뮬레이터는 시간 에 따른 적재장비의 활용 상태, 대기행렬의 길이, 대기행 렬에서의 AD, 시뮬레이션 기간 동안의 총 적재-운반 작 업 횟수 등을 분석하여 그 결과를 저장/갱신한다. 시뮬레 이션이 종료되면 시뮬레이터는 저장된 값들을 출력자료 의 형태로 제공하며, 출력되는 자료 중 적재-운반 작업으 로 시스템에서 발생하는 수익의 하루 평균치(Daily Profit, DP, 원)는 다음의 식에 의해 산정된다.
×× (2)
여기서 NH는 시뮬레이션 기간 동안의 총 적재-운반 작업 횟수(Number of Haulage operations), P는 1회 적 재-운반 작업으로 얻을 수 있는 이익(Profit, 원), NT는 시스템에 투입된 트럭의 수(Number of Trucks, 대), TC 는 트럭 한 대당 운영비(Truck’s operation Cost, 원/일), W는 트럭 운전자 인건비(Wage, 원/일), FC는 적재장비
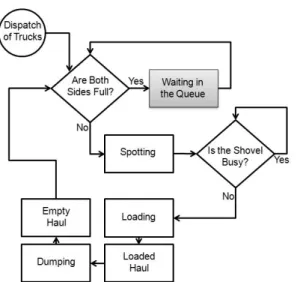
Fig. 4. Procedure for simulating truck-shovel operation (type: double-sided loading).
Fig. 5. Software architecture for simulating truck-shovel operation.
의 운영비와 적재장비 운전자의 인건비 등을 포함한 적 재-운반 시스템 운영에 필요한 고정비(Fixed Cost, 원/
일)를 의미한다.
적재장비가 좌우 측면 공간을 모두 활용하는 경우 시 뮬레이터가 자료를 처리하는 절차는 Fig. 4와 같다. 시스 템에 트럭이 새로 투입되거나 폐석의 투하를 마치고 트 럭이 적재지점으로 다시 돌아왔을 때, 시뮬레이터는 적 재장비의 좌우 측면 공간이 모두 사용되고 있는지를 먼 저 확인한다. 만약, 적재장비의 좌우 측면 공간 모두 트 럭들이 정차해 있는 경우 시뮬레이터는 새로 투입된 트 럭을 대기행렬로 합류시킨다. 반면, 좌우 측면 공간중 사 용이 가능한 공간이 존재할 경우에는 트럭이 미리 적재 장비의 비어있는 측면 공간으로 접근하는 것을 허용하여 이후 작업을 준비할 수 있도록 한다. 트럭이 적재장비에 미리 접근하여 대기할 경우, 대기행렬에 합류해 있는 동 안 발생할 수 있는 AD중 일부를 STL로 전환하여 사용할 수 있으므로 트럭 순환시간을 단축할 수 있다.
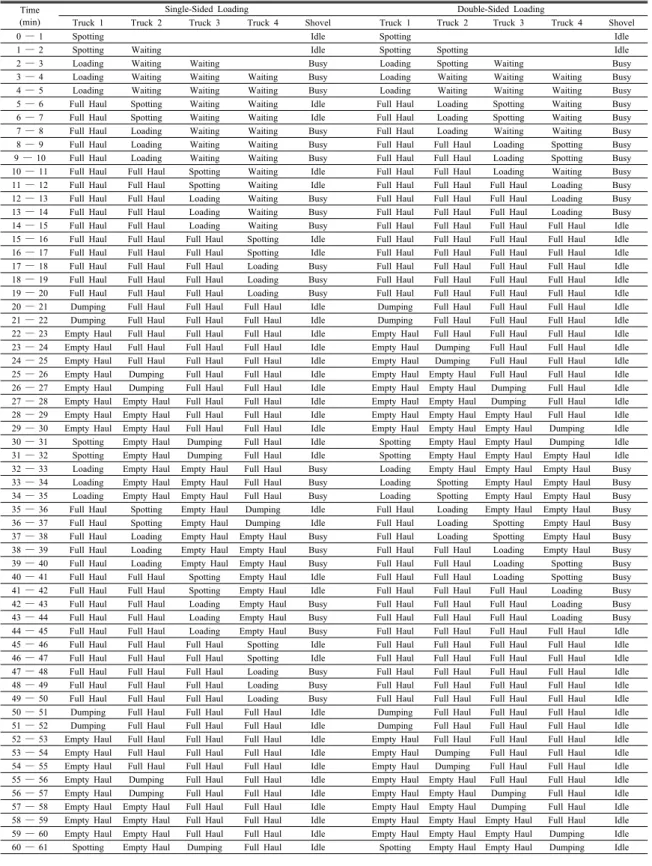
Table 2는 노천 채광장의 적재-운반 시스템에 4대의 트럭이 1분 간격으로 투입되었을 때 시간의 흐름에 따라 발생할 수 있는 이산적인 사건들을 정리한 예이다. 시뮬 레이션의 편의를 위해 시간연구의 결과인 STL은 2 ± 0 분, LT은 3 ± 0분, TL은 15 ± 0분, STD와 DT는 합산하 여 2 ± 0분, TE는 8 ± 0분으로 투입된 4대의 트럭에 대 하여 동일하게 가정하였다. 적재장비가 한쪽 측면만 활 용하는 경우를 살펴보면, 초기에 트럭이 시스템에 투입 되었을 때 15분까지 트럭들의 대기행렬이 생성되며 AD 가 발생하는 것을 볼 수 있다. 적재장비는 3분 동안의 작
업을 진행한 후 다음 트럭이 적재장비로 접근하는 동안 2분간 휴식하는 사이클을 반복한다. 적재장비가 좌우 측 면 공간을 모두 활용할 경우에는 트럭이 시스템에 처음 투입되었을 때와 트럭이 폐석 투하를 마치고 적재장비로 다시 돌아왔을 때 대기행렬에서 발생하는 AD중 일부가 STL로 사용된다. 그 결과 트럭 순환시간이 2분 단축되며 적재장비의 활용률도 개선된 것을 볼 수 있다. 61분까지 트럭이 폐석을 투하한 총 횟수는 이산적인 사건을 기준 으로 적재장비가 한쪽 측면만 활용하는 경우 6.5회이며, 적재장비가 좌우 측면 공간을 모두 활용할 경우 8회로 나타났다. 시뮬레이션 기간이 길어지면 폐석 투하 횟수 의 차이는 더 커질 것으로 판단된다.
소프트웨어 개발
본 연구에서 개발된 소프트웨어의 구조는 Fig. 5와 같 다. 개발된 소프트웨어는 Visual Basic.NET 2008을 이 용하여 작성되었으며 마이크로소프트 윈도우즈 운영체 제(i.e., XP, Vista, 7)가 설치된 PC에서 사용이 가능하 다. 소프트웨어는 크게 그래픽 사용자 인터페이스 부분 과 시뮬레이터 부분으로 구성된다. 시뮬레이션을 수행하 기 위한 전처리 과정으로서 사용자는 그래픽 인터페이스 를 통해 시뮬레이션 조건을 설정하고 시뮬레이터에 입력 될 파일을 생성할 수 있다. 시뮬레이터에 입력될 파일이 생성되면 소프트웨어는 GPSS/H 시뮬레이션 엔진을 호 출하여 시뮬레이션을 수행한다. 시뮬레이션이 완료되면 GPSS/H 시뮬레이션 엔진은 텍스트 문자열로 구성된 시 뮬레이션 결과 파일을 생성하며, 소프트웨어는 자동으로
Table 2. Example of simulating a truck-shovel operation system with 4 trucks and a shovel
Time (min)
Single-Sided Loading Double-Sided Loading
Truck 1 Truck 2 Truck 3 Truck 4 Shovel Truck 1 Truck 2 Truck 3 Truck 4 Shovel
0 ― 1 Spotting Idle Spotting Idle
1 ― 2 Spotting Waiting Idle Spotting Spotting Idle
2 ― 3 Loading Waiting Waiting Busy Loading Spotting Waiting Busy
3 ― 4 Loading Waiting Waiting Waiting Busy Loading Waiting Waiting Waiting Busy
4 ― 5 Loading Waiting Waiting Waiting Busy Loading Waiting Waiting Waiting Busy
5 ― 6 Full Haul Spotting Waiting Waiting Idle Full Haul Loading Spotting Waiting Busy
6 ― 7 Full Haul Spotting Waiting Waiting Idle Full Haul Loading Spotting Waiting Busy
7 ― 8 Full Haul Loading Waiting Waiting Busy Full Haul Loading Waiting Waiting Busy
8 ― 9 Full Haul Loading Waiting Waiting Busy Full Haul Full Haul Loading Spotting Busy
9 ― 10 Full Haul Loading Waiting Waiting Busy Full Haul Full Haul Loading Spotting Busy
10 ― 11 Full Haul Full Haul Spotting Waiting Idle Full Haul Full Haul Loading Waiting Busy
11 ― 12 Full Haul Full Haul Spotting Waiting Idle Full Haul Full Haul Full Haul Loading Busy 12 ― 13 Full Haul Full Haul Loading Waiting Busy Full Haul Full Haul Full Haul Loading Busy 13 ― 14 Full Haul Full Haul Loading Waiting Busy Full Haul Full Haul Full Haul Loading Busy 14 ― 15 Full Haul Full Haul Loading Waiting Busy Full Haul Full Haul Full Haul Full Haul Idle 15 ― 16 Full Haul Full Haul Full Haul Spotting Idle Full Haul Full Haul Full Haul Full Haul Idle 16 ― 17 Full Haul Full Haul Full Haul Spotting Idle Full Haul Full Haul Full Haul Full Haul Idle 17 ― 18 Full Haul Full Haul Full Haul Loading Busy Full Haul Full Haul Full Haul Full Haul Idle 18 ― 19 Full Haul Full Haul Full Haul Loading Busy Full Haul Full Haul Full Haul Full Haul Idle 19 ― 20 Full Haul Full Haul Full Haul Loading Busy Full Haul Full Haul Full Haul Full Haul Idle 20 ― 21 Dumping Full Haul Full Haul Full Haul Idle Dumping Full Haul Full Haul Full Haul Idle 21 ― 22 Dumping Full Haul Full Haul Full Haul Idle Dumping Full Haul Full Haul Full Haul Idle 22 ― 23 Empty Haul Full Haul Full Haul Full Haul Idle Empty Haul Full Haul Full Haul Full Haul Idle 23 ― 24 Empty Haul Full Haul Full Haul Full Haul Idle Empty Haul Dumping Full Haul Full Haul Idle 24 ― 25 Empty Haul Full Haul Full Haul Full Haul Idle Empty Haul Dumping Full Haul Full Haul Idle 25 ― 26 Empty Haul Dumping Full Haul Full Haul Idle Empty Haul Empty Haul Full Haul Full Haul Idle 26 ― 27 Empty Haul Dumping Full Haul Full Haul Idle Empty Haul Empty Haul Dumping Full Haul Idle 27 ― 28 Empty Haul Empty Haul Full Haul Full Haul Idle Empty Haul Empty Haul Dumping Full Haul Idle 28 ― 29 Empty Haul Empty Haul Full Haul Full Haul Idle Empty Haul Empty Haul Empty Haul Full Haul Idle 29 ― 30 Empty Haul Empty Haul Full Haul Full Haul Idle Empty Haul Empty Haul Empty Haul Dumping Idle 30 ― 31 Spotting Empty Haul Dumping Full Haul Idle Spotting Empty Haul Empty Haul Dumping Idle 31 ― 32 Spotting Empty Haul Dumping Full Haul Idle Spotting Empty Haul Empty Haul Empty Haul Idle 32 ― 33 Loading Empty Haul Empty Haul Full Haul Busy Loading Empty Haul Empty Haul Empty Haul Busy 33 ― 34 Loading Empty Haul Empty Haul Full Haul Busy Loading Spotting Empty Haul Empty Haul Busy 34 ― 35 Loading Empty Haul Empty Haul Full Haul Busy Loading Spotting Empty Haul Empty Haul Busy 35 ― 36 Full Haul Spotting Empty Haul Dumping Idle Full Haul Loading Empty Haul Empty Haul Busy 36 ― 37 Full Haul Spotting Empty Haul Dumping Idle Full Haul Loading Spotting Empty Haul Busy 37 ― 38 Full Haul Loading Empty Haul Empty Haul Busy Full Haul Loading Spotting Empty Haul Busy 38 ― 39 Full Haul Loading Empty Haul Empty Haul Busy Full Haul Full Haul Loading Empty Haul Busy 39 ― 40 Full Haul Loading Empty Haul Empty Haul Busy Full Haul Full Haul Loading Spotting Busy 40 ― 41 Full Haul Full Haul Spotting Empty Haul Idle Full Haul Full Haul Loading Spotting Busy 41 ― 42 Full Haul Full Haul Spotting Empty Haul Idle Full Haul Full Haul Full Haul Loading Busy 42 ― 43 Full Haul Full Haul Loading Empty Haul Busy Full Haul Full Haul Full Haul Loading Busy 43 ― 44 Full Haul Full Haul Loading Empty Haul Busy Full Haul Full Haul Full Haul Loading Busy 44 ― 45 Full Haul Full Haul Loading Empty Haul Busy Full Haul Full Haul Full Haul Full Haul Idle 45 ― 46 Full Haul Full Haul Full Haul Spotting Idle Full Haul Full Haul Full Haul Full Haul Idle 46 ― 47 Full Haul Full Haul Full Haul Spotting Idle Full Haul Full Haul Full Haul Full Haul Idle 47 ― 48 Full Haul Full Haul Full Haul Loading Busy Full Haul Full Haul Full Haul Full Haul Idle 48 ― 49 Full Haul Full Haul Full Haul Loading Busy Full Haul Full Haul Full Haul Full Haul Idle 49 ― 50 Full Haul Full Haul Full Haul Loading Busy Full Haul Full Haul Full Haul Full Haul Idle 50 ― 51 Dumping Full Haul Full Haul Full Haul Idle Dumping Full Haul Full Haul Full Haul Idle 51 ― 52 Dumping Full Haul Full Haul Full Haul Idle Dumping Full Haul Full Haul Full Haul Idle 52 ― 53 Empty Haul Full Haul Full Haul Full Haul Idle Empty Haul Full Haul Full Haul Full Haul Idle 53 ― 54 Empty Haul Full Haul Full Haul Full Haul Idle Empty Haul Dumping Full Haul Full Haul Idle 54 ― 55 Empty Haul Full Haul Full Haul Full Haul Idle Empty Haul Dumping Full Haul Full Haul Idle 55 ― 56 Empty Haul Dumping Full Haul Full Haul Idle Empty Haul Empty Haul Full Haul Full Haul Idle 56 ― 57 Empty Haul Dumping Full Haul Full Haul Idle Empty Haul Empty Haul Dumping Full Haul Idle 57 ― 58 Empty Haul Empty Haul Full Haul Full Haul Idle Empty Haul Empty Haul Dumping Full Haul Idle 58 ― 59 Empty Haul Empty Haul Full Haul Full Haul Idle Empty Haul Empty Haul Empty Haul Full Haul Idle 59 ― 60 Empty Haul Empty Haul Full Haul Full Haul Idle Empty Haul Empty Haul Empty Haul Dumping Idle 60 ― 61 Spotting Empty Haul Dumping Full Haul Idle Spotting Empty Haul Empty Haul Dumping Idle
Fig. 6. Graphical user interface of the software developed in this study.
(a)
(b)
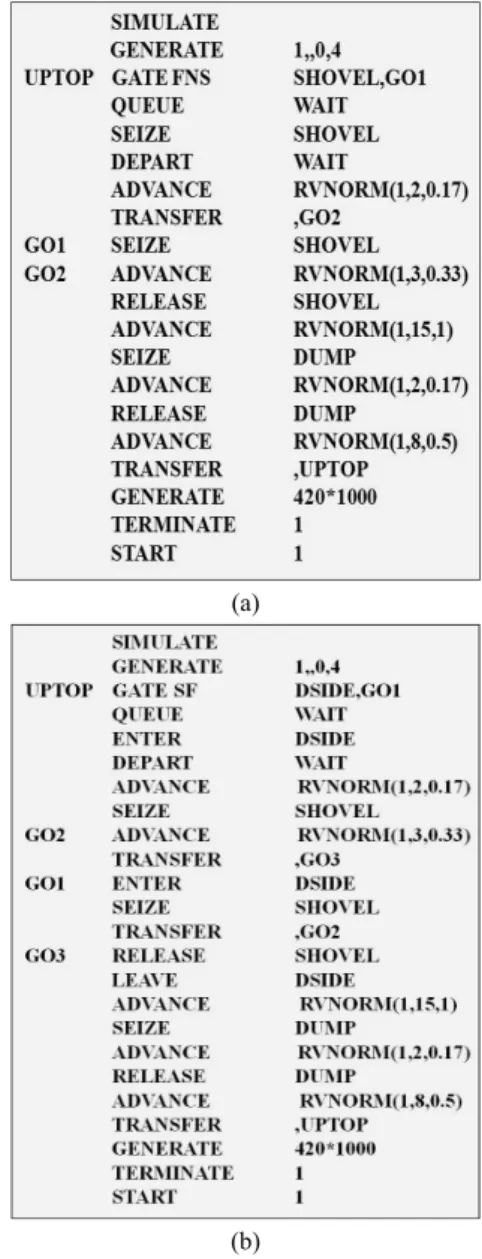
Fig. 7. A part of the GPSS/H input file for simulating truck-shovel operation. (a) Single-sided loading. (b) Double- sided loading.
결과 파일을 분석하여 그래픽 사용자 인터페이스를 통해 정보를 출력한다.
Fig. 6은 개발된 소프트웨어의 그래픽 사용자 인터페 이스를 보여준다. Simulation 버튼을 클릭하면 Fig. 7과 같이 텍스트 문자열 형식의 명령어들로 구성된 GPSS/H 시뮬레이션 입력파일이 생성되며, 생성된 입력파일과 함 께 시뮬레이션 엔진이 호출된다. 시뮬레이션이 종료되면 그 결과는 그래픽 사용자 인터페이스의 우측에 출력된다.
사례 연구
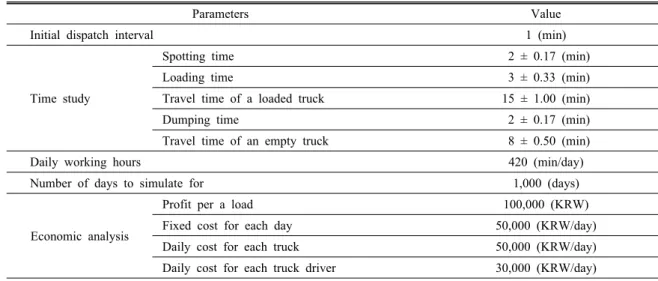
본 연구에서는 개발된 소프트웨어를 활용한 사례연구 결과를 제시한다. 노천 채광장의 적재-운반 작업을 시뮬 레이션 하여 채광장에 투입해야 하는 트럭의 수를 최적 화하는 것이 사례연구의 목적이다. Table 3은 적재-운반 작업의 시뮬레이션을 위해 소프트웨어에 입력된 값들을 보여준다. 하루 작업시간은 7시간(420분)으로 가정하였 고, 1000일 동안의 작업 기간에 대하여 시뮬레이션을 수 행하였다. 적재장비의 공간 활용 유형에 따른 시뮬레이 션의 결과를 비교하기 위하여 적재장비가 한쪽 측면만 활용하는 경우와 좌우 측면을 모두 활용하는 경우를 모 두 고려하였다. 투입되는 트럭의 수를 4대부터 시작하여 한 대씩 증가시켜 가면서 시뮬레이션을 반복적으로 수행 하였고, 시뮬레이션 결과를 비교하여 적재-운반 작업으 로 시스템에서 발생하는 수익의 하루 평균치(원/일)를 최대로 할 수 있는 트럭의 수를 최적해로 결정하였다. 시 뮬레이터 개발시 사용된 가정이 사례연구에도 동일하게 적용되었다. 실제 현장에서는 운반거리가 고정되어 있지 않기 때문에 Table 3에 제시된 트럭 이동시간과 관련된 값들이 시간에 흐름에 따라 달라질 수 있다. 그러나 본
연구에서는 현장의 조건을 단순화하기 위하여 시뮬레이 션 기간 동안 트럭 이동시간에 대한 값들이 동일한 확률 분포를 유지한다고 가정하고 사례연구를 수행하였다.
시뮬레이션 결과 적재장비가 한쪽 측면 공간만을 사용 할 경우 시스템에 7대의 트럭을 투입하는 것이 경제성 측면에서 가장 유리한 것으로 나타났다(Table 4, Fig. 8).
8대 이상의 트럭이 투입될 경우 적재장비의 활용률은 100%로 일정하게 유지되지만, 트럭의 수가 증가함에 따
Table 3. Parameter settings for simulating truck-shovel operation as a case study
Parameters Value
Initial dispatch interval 1 (min)
Time study
Spotting time 2 ± 0.17 (min)
Loading time 3 ± 0.33 (min)
Travel time of a loaded truck 15 ± 1.00 (min)
Dumping time 2 ± 0.17 (min)
Travel time of an empty truck 8 ± 0.50 (min)
Daily working hours 420 (min/day)
Number of days to simulate for 1,000 (days)
Economic analysis
Profit per a load 100,000 (KRW)
Fixed cost for each day 50,000 (KRW/day)
Daily cost for each truck 50,000 (KRW/day)
Daily cost for each truck driver 30,000 (KRW/day)
Table 4. Simulation results from the truck-shovel operation system (type: single-sided loading)
Number of trucks
Average loads dumped per a day
Average utilization of
shovel (%)
Maximum queue length
Average queue length
Average waiting time in
queue (min)
Average profit per a day
(KRW)
4 55 66.01 3.00 0.04 1.25 5,174,200
5 68 81.77 4.00 0.09 1.35 6,418,500
6 80 95.89 5.00 0.24 1.69 7,525,300
7 84 100.00 5.00 1.00 4.98 7,790,800
8 84 100.00 6.00 2.00 9.98 7,710,900
9 84 100.00 7.00 3.00 14.98 7,630,900
Fig. 8. Simulation results when 7 trucks are assigned to the truck-shovel operation system (type: single-sided loading).
라 대기행렬의 길이가 길어지고, 트럭 순환시간을 구성 하는 AD가 증가하게 되므로 적재-운반 작업의 경제성이 떨어진다. 6대의 트럭을 투입하는 경우에는 대기행렬의 길이는 짧아지지만, 적재장비의 활용률이 약 96% 정도 로 낮아지는 것을 확인할 수 있다.
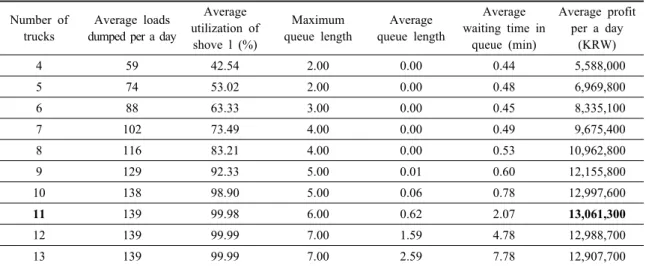
적재장비가 좌우 측면 공간을 모두 활용할 경우에는 11대의 트럭을 투입하는 것이 최적인 것으로 분석되었 다(Table 5, Fig. 9). 트럭의 수가 11대로 증가했음에도 불구하고 적재장비의 활용률은 100%에 가깝게 유지하 면서 대기행렬의 길이는 0.62대로 짧게 나타났다. 시스 템에 트럭을 12대 이상 투입할 경우에는 적재장비의 활 용률은 100%에 가깝게 유지되지만 트럭 대기행렬의 길 이가 길어지면서 경제성이 떨어지는 것을 볼 수 있다. 따 라서 시뮬레이션 결과를 종합적으로 분석할 때, 시뮬레 이터의 가정과 Table 3의 입력 값들을 반영한 적재-운반
Table 5. Simulation results from the truck-shovel operation system (type: double-sided loading)
Number of trucks
Average loads dumped per a day
Average utilization of
shove l (%)
Maximum queue length
Average queue length
Average waiting time in
queue (min)
Average profit per a day
(KRW)
4 59 42.54 2.00 0.00 0.44 5,588,000
5 74 53.02 2.00 0.00 0.48 6,969,800
6 88 63.33 3.00 0.00 0.45 8,335,100
7 102 73.49 4.00 0.00 0.49 9,675,400
8 116 83.21 4.00 0.00 0.53 10,962,800
9 129 92.33 5.00 0.01 0.60 12,155,800
10 138 98.90 5.00 0.06 0.78 12,997,600
11 139 99.98 6.00 0.62 2.07 13,061,300
12 139 99.99 7.00 1.59 4.78 12,988,700
13 139 99.99 7.00 2.59 7.78 12,907,700
Fig. 9. Simulation results when 11 trucks are assigned to the truck-shovel operation system (type: double-sided loading).
작업 환경에서는 적재장비가 좌우 측면 공간을 모두 활 용하고 11대의 트럭을 채광장에 투입하는 것이 최적의 운영 방안이라고 판단된다.
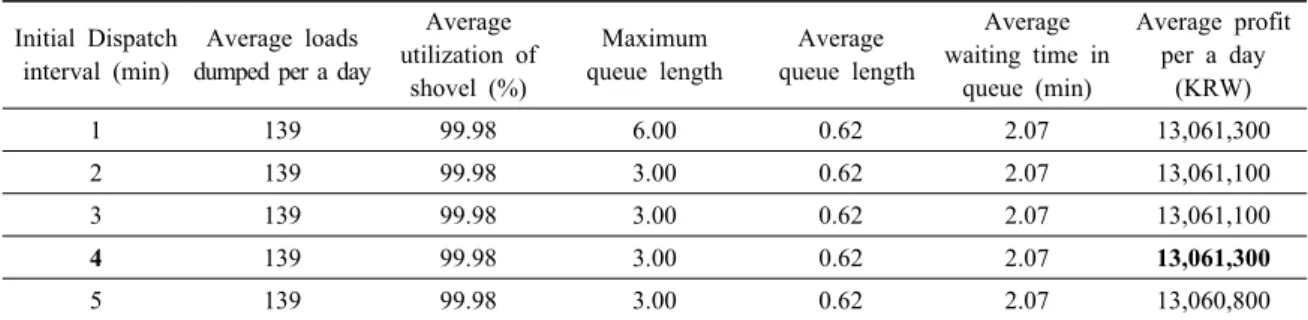
트럭이 시스템에 최초 투입될 때의 배차시간 간격이 시 뮬레이션 결과에 미치는 영향을 알아보기 위하여, 적재장 비가 좌우 측면 공간을 모두 활용하고 11대의 트럭을 적 재-운반 시스템에 투입하는 경우에 대해 Table 6과 같이 민감도 분석을 수행하였다. 배차시간 간격을 1분부터 5 분까지 고려하여 시뮬레이션을 수행한 결과 4분 간격으 로 트럭을 배차하는 것이 경제성 측면에서 가장 유리한 것으로 나타났다. 그러나 다른 배차시간 간격에 대한 시 뮬레이션 결과들과 비교할 때 그 차이는 크지 않았다. 시
뮬레이션 기간을 1,000일로 충분히 길게 고려하여 사례 연구를 수행하였기 때문에 최초 트럭 배차시간 간격이 시 뮬레이션의 최종 결과에 미치는 영향이 크지 않았던 것으 로 판단된다. 민감도 분석 결과를 볼 때 적재-운반 작업의 효과적인 운영을 위해서는 시스템에 투입되는 트럭 수를 최적화하는 것이 보다 중요하며, 트럭들의 초기 배차시간 간격은 상대적으로 영향이 크지 않음을 알 수 있다.
본 사례연구의 결과는 시뮬레이터 개발시 사용된 다양 한 가정과 Table 3의 입력 값들에 근거하여 도출되었다.
따라서 실제 현장의 상황을 보다 정확히 반영하기 위해 서는 다음과 같은 조건에 대한 추가적인 고려가 필요하 다. 첫째, 실제 현장에서는 적재장비가 트럭 적재 작업뿐 만 아니라 파쇄물 정리 및 집적 등에도 사용되기 때문에 전체 작업시간 중 트럭 적재 작업에 활용될 수 있는 시 간은 50-60% 정도이다. 따라서 시스템에 11대의 트럭을 투입할 경우 적재장비의 활용률이 100% 가깝게 유지된 다는 결론은 실제 현장의 상황을 고려할 때 과대 평가되 었다고 판단된다. 이를 개선하기 위해서는 시뮬레이터가 트럭 순환 시간뿐만 아니라 적재장비의 작업 사이클까지 함께 고려할 수 있도록 기능을 확장할 필요가 있다. 둘 째, 사례연구에서는 1,000일 간의 시뮬레이션 기간 동안 시스템 내의 장비의 가동률이 100% 유지된다고 가정하 였다. 그러나 실제 현장에서는 장비의 고장 및 수리, 유 지관리 작업 등으로 1,000일 동안 시스템의 가동률을 100%로 지속하는 것이 어렵다. 따라서 향후 연구에는 트럭의 고장, 수리, 유지관리에 필요한 시간들도 시뮬레 이터가 고려할 수 있도록 개선하는 작업이 필요할 것으 로 판단된다.
Table 6. Sensitivity analysis about trucks’ initial dispatch intervals for simulating the truck-shovel operation system. 11 trucks are assigned to the system where a shovel uses the double-sided loading method
Initial Dispatch interval (min)
Average loads dumped per a day
Average utilization of
shovel (%)
Maximum queue length
Average queue length
Average waiting time in
queue (min)
Average profit per a day
(KRW)
1 139 99.98 6.00 0.62 2.07 13,061,300
2 139 99.98 3.00 0.62 2.07 13,061,100
3 139 99.98 3.00 0.62 2.07 13,061,100
4 139 99.98 3.00 0.62 2.07 13,061,300
5 139 99.98 3.00 0.62 2.07 13,060,800
결 론
본 연구에서는 GPSS/H와 Visual Basic.NET을 이용하 여 노천 채광장의 적재-운반 작업을 시뮬레이션 할 수 있는 새로운 소프트웨어를 개발하였다. GPSS/H 시뮬레 이션 언어가 가지고 있는 사용자 편의성의 문제를 극복 하기 위해 Visual Basic.NET과 GPSS/H를 연계할 수 있 는 방법을 제안하였다. 그 결과 효율적인 시뮬레이터와 사용자 편의의 그래픽 인터페이스 함께 갖춘 시뮬레이션 소프트웨어를 개발할 수 있었다. 이 방법은 향후에도 광 업 분야에 필요한 다양한 시뮬레이션 소프트웨어 개발을 위해 유용하게 활용될 수 있을 것이라 판단된다. 개발된 소프트웨어를 이용하여 7시간(420분)의 하루 작업 시간 과 1,000일 동안의 작업 기간에 대하여 시뮬레이션을 수 행한 결과, Table 3에 제시된 작업 조건에서는 적재장비 가 좌우 측면 공간을 모두 활용하고 11대의 트럭을 시스 템에 투입하는 것이 경제성 측면에서 최적의 운영 방안 인 것으로 분석되었다. 반면, 적재장비가 한쪽 측면 공간 만을 사용할 경우에는 시스템에 7대의 트럭을 투입하는 것이 경제성 측면에서 가정 유리한 것으로 나타났다. 트 럭의 배차시간에 대한 민감도 분석을 수행한 결과 트럭 의 초기 배차시간 간격은 적재-운반 작업의 효율성에 크 게 영향을 주지 않은 것을 알 수 있었다.
본 연구에서 개발된 시뮬레이션 소프트웨어는 다음과 같은 장점을 가진다.
1. 사용자 편의의 그래픽 인터페이스를 제공하므로 광 산 기술자들이 쉽게 활용할 수 있으며, GPSS/H 시뮬레 이션 엔진을 활용하였기 때문에 적재-운반 시뮬레이션 을 효과적으로 수행할 수 있다.
2. 셰어웨어로 제공되는 Student GPSS/H 버전을 시뮬 레이션 엔진으로 사용했기 때문에 교육 및 연구의 목적 으로는 무료로 사용이 가능하며, 광산 현장에서는 가격 이 저렴한 Personal GPSS/H 버전의 시뮬레이션 엔진을 구비할 경우 사용이 가능하다.
3. 많은 응용분야에서 그 성능이 입증된 GPSS/H 시뮬 레이션 언어를 사용했기 때문에 시뮬레이션 결과를 신뢰 할 수 있으며, 필요에 따라 시뮬레이터의 기능을 쉽게 확 장할 수 있는 장점이 있다.
개발된 소프트웨어는 현재 한 개의 적재장비, 한 곳의 폐석장, 단일 종류의 트럭들로 구성된 단순한 형태의 적 재-운반 시스템만을 시뮬레이션 할 수 있다. 그러나 소 프트웨어가 노천광산 현장에서 실질적으로 활용되기 위 해서는 다수의 적재장비, 다수의 폐석장(또는 광석 적치 장), 다양한 종류의 트럭들로 구성된 보다 복잡한 형태 의 적재-운반 시스템도 시뮬레이션 할 수 있어야 할 것 이다. 사용자 인터페이스 측면에서는 적재-운반 시스템 에 투입될 최적의 트럭 수를 결정하기 위해, 사용자가 트럭의 수를 변경하면서 반복적으로 시뮬레이션을 수행 하고 최종적으로 시뮬레이션 결과를 종합하여 분석해야 하는 불편함이 있다. 교육 및 연구의 목적에서는 사용자 가 시뮬레이션 과정을 직접 확인할 수 있도록 소프트웨 어를 개발하는 것이 도움이 될 수 있으나, 광산 현장의 실무 활용 목적에서는 시뮬레이션 조건만 입력하면 소 프트웨어가 자동으로 트럭의 수를 변경하면서 시뮬레이 션을 수행하고, 최적의 트럭 수를 결정하여 출력할 수 있도록 소프트웨어를 개발하는 것이 보다 유용할 것이 다. 시뮬레이터와 사용자 인터페이스의 개선을 위한 추 가적인 연구가 필요하다고 판단된다. 또한, 향후 연구를 통해 인터넷상에서 사용이 가능한 온라인 버전의 적재- 운반 시뮬레이션 소프트웨어를 개발할 경우, 소프트웨 어를 보다 효과적으로 유지/관리할 수 있으며 교육기관 이나 광산현장에서의 소프트웨어 활용성을 높일 수 있 을 것으로 기대한다.
사 사
본 연구는 부경대학교 환경 ․ 해양대학 2011년 신진교 수 연구력 강화 사업의 지원으로 수행되었다.
최 요 순
현재 부경대학교 환경해양대학 에너지자원공학과 전임강사 (本 學會誌 第48券 第2号 參照)
참고문헌
최요순, 선우춘, 박형동, 2007, “대규모 노천광산의 운반 효율성 향상을 위한 덤프트럭의 최적 운반경로 분석,”
한국지구시스템공학회지, 제44권 6호, pp. 477-491.
Aksoy, M. and Yalcin, E., 2000, “A computer program for open pit mine equipment selection: TruckMac,” In: Panagiotou, G.N. and Michalakopoulos, T.N. (eds), Mine Planning and Equipment Selection 2000, Balkema, Rotterdam, Netherlands, pp. 499-503.
Alarie, S. and Gamache, M., 2002, “Overview of solution strategies used in truck dispatching systems for open pit mines,” International Journal of Surface Mining, Reclamation and Environment, Vol. 16, No. 1, pp. 59-76.
Blackwell, G.H., 1999, “Estimation of large open pit haulage truck requirements,” CIM Bulletin, Vol. 92, No. 1028, pp.
143-149.
Bonates, E.J.L., 1996, “Interactive truck haulage simulation program,” In: Hennies, W.T., Ayres Da Silva, L.A. and Chaves, A.P. (eds), Mine Planning and Equipment Selection 1996, Balkema, Rotterdam, Netherlands, pp. 51-57.
Cardu, M., Sacerdote, I., Magro, A. and Crosa, M., 2004,
“Analysis of possible alternatives for the exploration and hauling system in a marl mine (Tavernola BG, Italy),”
In: Hardygora, M., Paszkowska, G. and Sikora, M. (eds), Mine Planning and Equipment Selection 2004, Taylor
& Francis Group, London, UK, pp. 543-551.
Choi, Y. and Nieto, A., 2011, “Optimal haulage routing of off-road dump trucks in construction and mining sites using Google Earth and a modified least-cost path algorithm,”
Automation in Construction, in-press, http://dx.doi.org/10.1016/
j.autcon.2011.03.015.
Choi, Y., Park, H.D., Sunwoo, C. and Clarke, K.C., 2009,
“Multi-criteria evaluation and least-cost path analysis for optimal haulage routing of dump trucks in large scale open-pit mines,” International Journal of Geographical Information Science, Vol. 23, No. 12, pp. 1541-1567.
Ercelebi, S.G. and Bascetin, A., 2009, “Optimization of shovel-truck system for surface mining,” The Journal of the Southern African Institute of Mining and Metallurgy, Vol. 109, pp. 433-439.
Hauck, R.F., 1979, “Computer-controlled truck dispatching in open-pit mines,” In: Weiss, A. (eds), Computer Methods for the 80’s in the Mineral Industry, Society of Mining
Engineers of the American Institute of Minning, Metallurgical, and Petroleum Engineers, New York, USA, pp. 735-742.
Hays, R.M., 1990, “Truck,” In: Kennedy, B. A. (eds), Surface Mining, Society for Mining, Metallurgy, and Exploration, Littleton, USA, pp. 672-691.
Krause, A. and Musingwini, C. 2007, “Modelling open pit shovel-truck systems using the machine repair model,”
The Journal of the Southern African Institute of Mining and Metallurgy, Vol. 107, pp. 469-476.
Newman, A.M., Rubio, E., Caro, R., Weintraub, A. and Eurek, K., 2010, “A review of operations research in mine planning,” Interfaces, Vol. 40, No. 3, pp. 222-245.
Niemann-Delius, C. and Fedurek, B., 2004, “Computer-aided simulation of loading and transport in medium and small scale surface mines,” In: Hardygora, M., Paszkowska, G.
and Sikora, M. (eds), Mine Planning and Equipment Selection 2004, Taylor & Francis Group, London, UK, pp. 579-584.
Oraee, K. and Asi, B., 2004, “Fuzzy model for truck allocation in surface mines,” In: Hardygora, M., Paszkowska, G. and Sikora, M. (eds), Mine Planning and Equipment Selection 2004, Taylor & Francis Group, London, UK, pp. 585-591.
Osanloo, M., Gholamnejad, J. and Karimi, B., 2008, “Long- term open pit mine production planning: A review of models and algorithms,” International Journal of Mining, Reclamation and Environment, Vol 22, No. 1, pp. 3-35.
Sturgul, J.R., 2000, Mine Design: Examples using Simulation, Society for Mining, Metallurgy, and Exploration, Littleton, USA, pp. 7-32.
Suboleski, S.C., 1975, Mine Systems Engineering Lecture Notes, The Pennsylvania State University, University Park, Pennsylvania, USA.
Temeng, V.A., 1997, A Computerized Model for Truck Dispatching in Open Pit Mines, PhD dissertation, Michigan Technological University, Michigan, USA.
Topuz, E. and Duan, C., 1989, “A survey of operations research applications in the mining industry,” CIM Bulletin, Vol. 82, No. 925, pp. 48-40.
Yan, S. and Lai, W., 2007, “An optimal scheduling model for ready mixed concrete supply with overtime consider- ations,” Automation in Construction, Vol. 16, No. 6, pp.
734-744.
Zhang, H., 2008, “Multi-objective simulation-optimization for earthmoving operations,” Automation in Construction, Vol. 18, No. 1, pp. 79-86.