191
학 술 논 문힙업기능이 적용된 기립보조의자의 생체역학적 평가
배주환·문인혁
동의대학교 메카트로닉스공학과
Biomechanical Assessment of Lifting Chair with Hip-up Function
Ju-Hwan Bae and Inhuyk Moon
Department of Mechatronics Engineering, Dong-Eui University, Busan, Korea (Received January 26, 2011. Accepted May 25, 2011)
Abstract: Lifting chair is a typical assistive product to aid for standing up and sitting down for persons with disability.
It is particularly useful for the elderly persons whose muscular system is weakened by degenerative joint disease.
This paper describes biomechanical assessments of lifting chair with hip-up function. In experiments we measured 3D motion and electromyographic(EMG) signal on the femoral muscle when subject performs the standing motion on the predetermined seat height. Based on assessment of the standing motion, we select the hip-up angle as 15 degrees to cover the relative femoral angle when EMG peak value is appeared. Using an implemented prototype lift- ing chair with hip-up function we perform standing experiments with five subjects. The experimental results show that the lifting and hip-up functions are effective to assist for standing up motion with less muscle force.
Key words: Lifting Chair, Standing up, Hip-up function, Assessment, EMG
I. 서 론
일어서기(standing)와 앉기(sitting) 동작은 일상생활(activity of daily living, ADL) 에 있어서 가장 기본적인 동작이다. 그 러나 하지의 근력이 약화되거나 근골격계에 장애를 가진 고 령자나 장애인은 이러한 일상생활 동작에 있어서 어려움이 있다. 그래서 간병인이나 가족과 같은 보조자의 조력에 의해 일상생활하는 것이 일반적이다. 하지만 보조자가 일어서기와 같은 동작을 보조하는 것도 간단한 일은 아니며, 수발(care) 행위중 불안정한 자세로 인해 보조자의 근골격계 부상우려도 상존하고 있다[1]. 보조기기(assistive product)[2]는 노인이 나 장애인의 자립생활을 지원하거나 간병인이나 보조자를 조 력할 수 있는 기기로, 최근 사회고령화에 따라 수요가 커지
고 있으며, 관련 제품의 개발과 연구도 활발히 진행되고 있다.
일어서기와 앉기와 같은 자세의 전환이나 기립보조와 관 련한 연구는, 휠체어 연구에서 쉽게 찾아 볼 수 있다. 휠체 어의 좌면(seat plate)을 사용자의 시선방향으로 회전시킴으 로써 사용자를 기립시키는 연구[3]와, 기립을 보조하고 자세 전환이 가능한 휠체어 연구[4,11]가 있었다. 그리고 휠체어 등판(back-rest) 각도를 조절하거나, 다리판(leg-rest)을 들어 올리는 눕기 기능(reclining function)에 관한 연구[5]도 있 었다. 그러나 이러한 연구는 휠체어 탑승자가 의자에 고정된 채 자세전환이 되는 것을 전제로 하였다.
침대에서의 기립지원에 관한 연구도 있었다. Hirata[10]
는 침대의 높이를 조절하여 사용자가 침대에서의 기립을 지 원하는 방법을 제안하였다.
일상생활에서 기립 및 자세전환을 보조할 수 있는 의자에 관한 연구도 있었다[6,7]. 기립 동작시 의자의 좌면을 사용자 의 시선방향으로 회전시키면서 상체를 밀어 올리는 기능(본 논문에서는 힙업기능(hip-up function)이라고 함)을 구현한 의자가 제안되었다[6]. 힙업기능은 어떠한 의자에도 부착할 수 있다는 장점이 있다. Komura[7]는 한국이나 일본과 같
Corresponding Author : 문인혁(614-714) 부산광역시 부산진구 가야3동 동의대학교 메카트로닉스 공학과
TEL: +82-51-890-2261 / FAX: +82-51-890-2883 E-mail: [email protected]
본 연구는 보건복지가족부 보건의료기술진흥사업의 지원에 의하여 이루어진 것임(과제고유번호 : A084996).
192
이 실내 좌식생활에서 적용할 수 있도록 좌면이 바닥까지 내려 가는 승강의자(본 논문에서는 기립보조의자라고 함)를 개발하였다.
기립보조의자(lifting chair)는 노인이나 장애인이 실내 일 상생활에서 신체적인 부담을 경감할 뿐 아니라, 앉거나 일어 설 때 발생할 수 있는 전도 위험도 방지할 수 있다. 특히 휠 체어 사용자의 경우 실내의 바닥에서 휠체어로의 이승보조 (transfer assist) 도 가능하다. 최근에는 기립보조의자에 눕기 및 기울기 기능, 그리고 힙업기능까지 구현하여 생활의 편의 를 고려한 다양한 제품이 출시되고 있다. 그러나 이러한 기립 보조의자에 대한 인체공학적인 근거나, 생체역학적인 해석 등 을 고려하지 않고 개발되었으며, 또한 사용자에 대한 인체 영 향이나 효과 등과 같은 분석도 없었다.
본 논문에서는 기립보조의자에 대한 생체역학적인 평가를 기반으로 힙업기능을 가진 기립보조의자에 대한 설계기준을 제시하고, 기능이 구현된 의자를 이용하여 5명의 피험자와 실험을 통해 기립보조의자에 대한 효과를 분석한다. 2장에서 는 프로토타입 기립보조의자를 제작하고, 3차원 동작 측정시 스템과 근전도 측정시스템을 이용하여 피험자를 대상으로 기 립시의 대퇴 각도와 대퇴 근전도를 측정한다. 3장에서는 2장 에서 측정한 대퇴 각도와 대퇴 근전도를 분석하고, 이에 따 라 힙업기구(hip-up mechanism)의 힙업각도를 선정 후, 힙 업기구를 설계한다. 4장에서는 피검자가 설정된 의자의 높이 에서 기립동작을 수행시, 대퇴 근전도의 측정을 통해 힙업기 능의 효과에 대해 평가를 수행한다. 이러한 실험결과로부터 본 연구에서 제시한 힙업기능을 가진 기립보조의자가 기립 동작시 하지 근력을 감소시키고, 기립을 보조에 유용하다는 것을 보인다.
II. 기립동작 분석
1. 기립보조의자의 설계
본 논문에서는 먼저 승강이 가능한 프로토타입 기립보조의 자를 설계하였다(그림 1(a). 참조). 기립보조의자는 승강기구 (lifting mechanism), 좌면기구(seat mechanism), 끼임감지 기구(entrapment sensing mechanism), 제어시스템(control system) 으로 구성하였다(그림 1(b)).
좌면 프레임(seat frame)을 올리고 내리는 승강기능은 기 립보조의자의 기본 기능이기 때문에 승강기구의 설계는 중요 하다. 본 논문에서는 좌면의 지지강도를 높이면서도 승강시 마찰을 최소화할 수 있도록 승강기구는 좌면프레임을 지지하 는 지지프레임(support frame)과, 지지프레임에 고정된 승강 기구의 컬럼(column)과 컬럼에 끼워져 컬럼을 따라 이동하는 리니어부쉬(linear bush), 그리고 좌면프레임의 승강 동작을 위한 선형구동기(linear actuator)로 구성하였다(그림 1(a)).
여기서 리니어부쉬는 좌면프레임과 컬럼을 연결하고, 이동 시에 마찰을 최소한으로 줄이는 역할을 한다. 일반적으로 인 체의 앉은 자세에서 상체와 대퇴사이의 각도는 105도 이상 이 되는 것이 바람직하기 때문에 등판각도는 수평에서 75도 를 유지하는 것이 좋다[8]. 본 연구에서 제안하는 기립보조 의자는 앉은자세에서 기립동작을 지원하는 것이 주 목적으로 하므로, 컬럼의 지지각도는 75도보다 높은 80도로 설계하였 다(그림 1(a)).
좌면의 최대 상승높이는 인체의 앉은 오금높이를 고려하여 선정하였다. 한국인 인체표준정보DB[15]에 의하면, 50대에 서 70대 사이의 연령대의 최대 앉은 오금높이는 428 mm이 다. 따라서 본 연구에서는 신체구조에 관계없이 모든 사람이 기립보조의자를 사용할 수 있도록 승강기구의 최대 상승높이 를 450 mm가 되도록 설계하였다. 최저 하강높이는 좌면의 하부 구조물의 높이를 고려하여 80 mm로 설계하였다.
2. 실험 방법
인체의 동작은 근육의 수축에 의해 발생하는 근력에 의해
그림 1. 프로토타입 전동식 기립보조의자 (a) 설계, (b) 제작된 기립 보조의자Fig. 1. Prototype electric lifting chair (a) design, (b) developed lifting chair
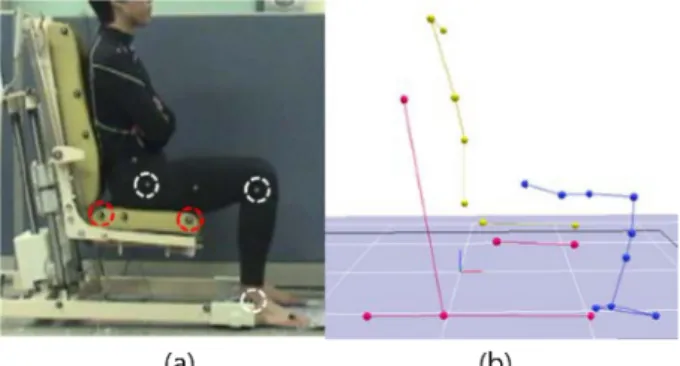
그림 2. 3차원 동작 측정 (a) 마커 위치, (b) 3차원 측정 결과 Fig. 2. 3D motion capture (a) marker positions, (b) measured 3D data
193 이루어진다. 따라서 기립동작(standing motion) 분석은 기
립시 사용하는 주요 근육의 근전도로부터 근력이나 관절의 모 멘트를 추정, 또는 상체와 하체의 관절각도를 측정함으로써 가능하다[12]. 그러나 본 논문에서는 좌면의 힙업각도(hip-up angle)에 따른 기립동작에 주안점을 두었기 때문에, 별도의 인체운동 해석은 수행하지 않고, 단지 좌면의 높이에 따른 기 립시의 대퇴각도 변화와 슬관절의 신전(extension)에 관여하 는 대퇴직근(Rectus femoris)의 근전도를 분석하였다[13].
본 연구에서는 피험자로서 대퇴근육에 병리학적 이상이 없 는 건강한 남성 5명(26세, 169 ± 5.5 cm, 76 ± 6 kg)을 선정 하였다. 대퇴각도는 6개의 고속 적외선 카메라로 구성된 3차 원 동작 측정시스템(HWK-200, MotionAnalysis Co.)으로 측정하였고, 대퇴직근의 근전도는 동적 근전도 측정시스템 (Bagnoli-4, Delsys Co.) 으로 측정하였다.
먼저 좌면의 높이에 따른 기립동작을 측정하였다.
Hutchinson 의 연구에서는 기립시 하체의 골격 각도를 파악 하기 위해 다양한 방법을 제안하였으나[14], 본 연구에서는 고관절과 슬관절 그리고 의자의 각 모서리에 적외선 반사 마 커를 부착하였다. 그림 2는 부착된 마커의 위치와 측정된 3 차원 동작 데이터를 보여준다.
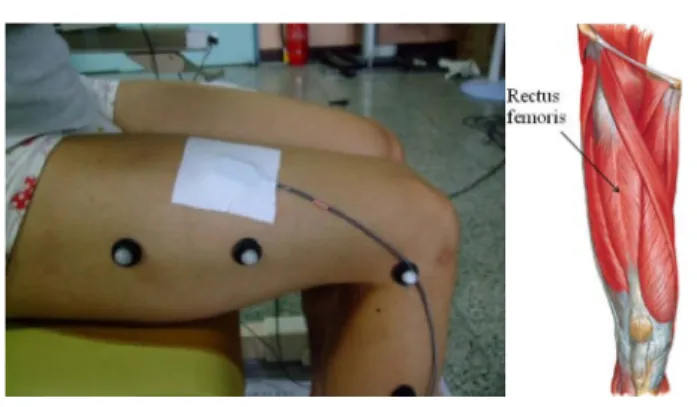
대퇴직근의 근전도는 그림 3과 같이 건식형 능동 전극 (dry-type active electrode) 인 DE-2.1(Delsys Co.)을 부착 하고, 1차적으로 20dB 증폭한 신호를 근전도 측정시스템에 입력하였다. 그리고 근전도 측정시스템은 20Hz ~ 450Hz 사이의 신호만을 다시 60dB 증폭함으로써 원근전도(raw EMG) 신호를 80dB(10,000 배) 증폭하였다. 이 신호는 3차 원 측정데이터와 동기화되고 1KHz로 샘플링 된다. 입력된 근전도는 60Hz 대역제거필터(band rejection filter, BRF) 에 의해 전원 잡음이 제거되고, 전파정류(full rectification) 을 취한 후 평활화 필터(smoothing filter)에 의해 최종적으 로 근전도의 진폭신호(envelope EMG)가 출력된다. 그림 4 는 원근전도 신호에서부터 진폭신호 출력까지의 신호처리 과 정을 보여준다. 기립동작 분석시 측정된 근전도와 3차원 기 립동작 데이터간의 시간지연이 발생하면 해석이 어렵기 때문 에, 본 연구에서는 진폭신호 생성시, 미분 알고리즘을 적용 하여 이동평균을 위한 데이터의 간격을 시간당 데이터의 특 성에 따라 가변하는, 적응 평활화 필터(adaptive smoothing filter)[9] 를 사용하였다.
피험자는 미리 설정된 초기높이(initial height)에서 기립 동작을 수행한다. 그러나 피험자마다 신체적 구조는 차이가
그림 4. 근전도 신호처리 Fig. 4. EMG signal processing 그림 3. 근전도 센서 부착 위치
Fig. 3. Electrode position for measuring EMG
그림 5. 초기대퇴각도에 의한 좌면 초기높이 (a) 7도, (b) 14도, (c) 21도 Fig. 5. Initial height of seat plate based on initial femoral angle (a) 7 degree, (b) 14 degree, (c) 21 degree
194
있으므로, 이 초기높이는 피험자가 의자에 앉았을 때 대퇴와 수평면과 이루는 각도가 설정된 초기각도(초기대퇴각도라고 함)가 될 때의 높이로 정하였다. 본 연구에서는 초기대퇴각 도는 7도, 14도, 21도를 기립동작의 초기높이로 설정하였다 ( 그림 5 참조). 여기서 초기대퇴각도 21도는 사용자의 발 뒤 꿈치가 바닥에서 떨어지지 않았을 때의 최대 좌면 높이에 해 당한다. 그리고 초기대퇴각도 7도는 대퇴의 위쪽 면이 수평 면과의 평행한 상태가 될 때의 좌면 높이에 해당한다. 본 연 구에서는 이 두 각도의 중간인 14도를 초기대퇴각도로 선정
하였다. 각 피험자는 초기대퇴각도, 즉 초기높이에서 각각 5 회씩 기립동작을 수행하였으며, 3차원 동작 측정데이터와, 대퇴직근의 근전도를 동시에 측정하였다.
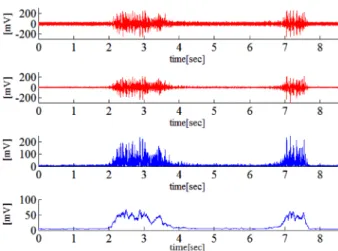
그림 6은 피험자가 기립동작 시 측정된 대퇴직근의 근전 도를 나타내었다. 첫 번째 그래프는 근전도 측정시스템의 출 력을 1KHz 샘플링하여 입력한 근전도 신호이며, 두 번째는 60Hz BRF(band rejection filter) 에 의해 전원 잡음이 제 거된 신호이고, 세 번째는 전파정류(full rectification)된 신 호이다. 마지막으로 적응 평활화 필터에 의해 근전도의 진폭 신호(envelope EMG)를 얻었다. 본 연구에서는 근전도 진 폭이 최대값(peak value)이 되는 시점에서의 기립동작 상 태를 분석 및 평가를 수행하였다.
3. 결과 및 분석
그림 7은 피험자별로 좌면의 초기높이, 즉 초기대퇴각도 에 따른 기립동작 시 측정된 근전도 진폭의 최대값에 대한 평균과 표준 편차를 나타내었다. 대퇴의 초기각도가 클수록 근전도의 최대값은 작아짐을 알 수 있다. 또한 분산분석법 (ANOVA test) 을 이용하여 좌면 높이(초기대퇴각도)에 따른 대퇴 근전도와의 유의성 분석을 하였다. 피험자 C 경우, 다 른 피험자에 비해 상대적으로 근전도의 최대값이 작고, 각 초기상태에 따른 근전도의 차이도 미약하여 현격한 차이 (p < 0.005) 는 도출하지는 못하였다. 그러나 초기대퇴각도가 7 도와 21도일 경우에는 모두 p < 0.05로 유의한 차이가 있 음을 확인할 수 있었다. 다만, 7도와 14도 간의 분석결과와, 14도와 21도 간의 분석결과는, 피험자 마다 차이가 있었다.
그림 6. 기립동작시 측정된 근전도의 신호처리 결과 (a) 입력 EMG, (b) 60Hz 잡음 제거, (c) 전파정류, (d) 출력 진폭신호
Fig. 6. Results of EMG signal processing measured on femoris muscle when standing (a) input EMG, (b) 60 Hz noise rejection, (c) full rectification, (d) output envelope
그림 7. 초기 대퇴각도에 따른 근전도 최대값의 분산분석 결과(*:p < 0.05, **:p < 0.005)
Fig. 7. Results of ANOVA test of EMG peak value by initial femoral angle(*:p < 0.05, **:p < 0.005)
195 피험자 D, E는 7도-14도 비교와, 14도-21도 비교에서 모두
유의한 차이를 나타내었지만, 피험자 A, B, C는 하나만 유 의한 차이를 나타내었다. 이러한 결과로부터 우리는 좌면이 높아짐에 따라, 즉 대퇴각도가 커짐에 따라 근전도의 최대 값은 작아지며, 기립보조에 효과적이라는 것을 알 수 있다.
특히 대퇴각도가 14도 이상 차이가 날 경우, 피험자 모두에 게 유의한 차이가 있음을 확인 할 수 있었다.
III. 힙업기구 설계
1. 힙업각도 설정
힙업기능의 구현을 위해서는 좌면 하부에서 좌면을 들어 올릴 수 있는 힙업기구의 설계가 필요하다. 그러나 좌면의 하강 최저 높이에 따라 힙업기구를 설치할 수 있는 공간(높 이와 간격)은 제한된다. 따라서 설계할 수 있는 최대 힙업각
도 역시 제한될 수 밖에 없다. 본 연구에서는 좌면의 힙업용 구동기로는 별도의 전기장치가 필요 없는 가스 스프링(gas spring)(Free lock gas oil, ICSN Co.) 을 사용하였다. 그러 나 본 연구에서 사용한 가스 스프링은 직경 27 mm, 길이 200 mm 이며, 최대 스트로크는 50 mm의 사양을 가지고 있 기 때문에, 좌면 하부의 공간 제약과 스트로크의 한계에 의 해 가능한 최대 힙업각도는 제한된다. 가급적 높은 힙업각도 가 기립보조에 효과적이라고 판단되지만, 기구의 제한조건을 고려하여 힙업각도를 설정할 필요가 있다.
따라서 본 연구에서는 2장에서 측정한 5명의 피험자에 대 한 기립동작시 대퇴직근의 근전도를 분석하여 힙업각도를 정 하였다. 특히 이 측정결과에서 최대 근전도가 나타날 때의 대퇴각도를 분석하였다. 그림 8은 피검자가 초기대퇴각도 7 도에서 기립시 측정한 대퇴각도와 근전도 진폭의 변화를 보 인다. 그리고 그림 9는 2장의 실험에서 설정한 7도, 14도, 21 도의 초기대퇴각도에 대한 근전도의 최대값이 나타났을 때의 상대적 대퇴 각도를 나타내었다. 이 데이터는 5명의 측정데 이터를 평균한 결과이고, 근전도의 최대값의 평균은 초기대
그림 8. 초기각도 7도에서 기립시 측정 결과 (a) 대퇴각도, (b) 근전 도 진폭Fig. 8. Measured results when subject stands up (a) femoral angle, (b) EMG envelope
그림 9. 기립시 근전도 최대값이 나타나는 상대적 대퇴각도 Fig. 9. Relative femoral angle when EMG peak value is appeared
그림 10. 힙업기구 (a) 설계, (b) 프로토타입 힙업기구
Fig. 10. Hip-up mechanism (a) design, (b) prototype hip-up mechanism
196
퇴각도에 대한 상대적 대퇴각도가 15도 이하에서 나타났다.
따라서 본 연구에서는 기립보조의자의 힙업각도를 15도로 설 정함으로써, 근전도의 최대값이 나타나는 대퇴각도에서는 힙 업 보조가 될 수 있도록 하였다.
2. 힙업기구 설계
그림 10은 힙업기구의 설계와 제작된 프로토타입 힙업기 구를 보여준다. 가스 스프링은 좌면프레임에 고정되고 스프 링 반발력으로 좌면을 위로 들어올린다. 그리고 힙업된 좌면 은 사용자의 체중에 의해 내려지게 된다. 따라서 본 연구에 서는 힙업보조와 사용자 체중에 의한 복원이 가능하도록 60 kgf 반발력의 가스 스프링을 선정하였다. 힙업기구의 초기 각 도는 수평축과 평행하게 설치하고, 그림 10(b)에서 보이는 것 과 같이 힙업이 되었을 때 좌면의 각도는 수평면에서 15도
상승하였다.
IV. 실험 및 결과
힙업기구를 기립보조의자에 적용한 후, 피험자의 동작에 대한 생체역학적 평가를 수행하였다. 이를 위해 5명의 피험 자는 기립보조의자의 초기높이에서 힙업보조가 있을 때와 없 을 때 각각 5회씩 기립동작을 수행하였다. 3차원 동작 측정 과 대퇴직근의 근전도 측정 등의 실험환경은 2.2와 동일하게 설정하였다.
표 1과 그림 11은 초기대퇴각도에서 기립동작 수행시, 힙 업보조의 유무에 따라 근전도 진폭의 최대값의 평균과 표준 편차를 나타내었다. 결과에서 보듯이 힙업보조가 있을 때의 최대값은 힙업보조가 없을 때보다 감소하는 것을 알 수 있
표 1. 힙업보조에 따른 근전도의 최대값 [mV] (평균 ± 표준편차) Table 1. EMG peak value by hip-up assist [mV] (Mean ± SD)
subject 7 degree 14 degree 21 degree
Non-assist Assist Non-assist Assist Non-assist Assist
A 63.87± 4.68 50.82± 4.46 46.05± 4.81 35.64± 2.72 40.3± 5.35 30.82± 4.64 B 73.27± 10.69 59.14± 8.27 66.29± 11.52 52.42± 6.41 50.18± 5.89 42.91± 3.53 C 27.89± 2.41 22.84± 2.42 26.44± 1.98 22.97± 2.13 17.53± 0.80 15.96± 2.24 D 63.32± 7.50 41.67± 4.70 45.41± 5.71 30.07± 4.44 22.08± 2.37 14.66± 1.11 E 58.68± 11.74 48.12± 3.66 43.87± 4.83 36.16± 2.55 29.71± 9.63 22.91± 3.45
그림 11. 힙업보조에 따른 근전도의 최대값과 분산분석 결과(*:p < 0.05, **:p < 0.005) (a) 피험자 A, (b) 피험자 B, (c) 피험자 C, (d) 피 험자 D, (e) 피험자 E
Fig. 11. EMG peak value and ANOVA test results by hip-up assist and non-assist(*:p < 0.05, **:p < 0.005) (a) subject A, (b) subject B, (c) subject C, (d) subject D, (e) subject E
197 다. 그리고 분산분석을 수행한 결과, 힙업보조가 있을 때는
좌면의 초기높이(초기대퇴각도)에 관계없이 힙업보조가 없을 때보다 근전도의 최대값은 작았으며, 그 차이도 유의하다는 것을 보여 준다. 다만, 초기대퇴각도가 21도일 때는, 피험자 C 와 피험자 E의 경우 p-value가 0.05보다 크게 나타났다. 이 것은 좌면의 초기 위치가 높을 때에는 힙업기능에 의한 기립 보조보다는, 좌면 높이에 따른 기립보조가 되고 있다는 것을 의미하며, 다른 한편으로는 개인의 근육이나 기립동작의 자 세의 특성에도 의존한다고 볼 수 있다. 그러나 근전도의 최 대값은 평균적으로 감소되는 경향을 보였다. 따라서 본 연구 에서 제안한 힙업기능은 기립보조에 효과적이라고 판단된다.
또한 힙업기능에 대한 기립보조효과를 보다 더 명확히 평 가하기 이해, 좌면의 초기 위치와 그리고 힙업보조를 두 변 수로 하는 2-way ANOVA를 실시하였다. 이 결과 p < 0.05 로 모두 유의한 차이가 있음을 확인할 수 있었다.
V. 결 론
본 논문에서는 의자의 좌면 높이와 힙업기능에 의한 기립 보조를 실험하고 평가하였다. 먼저, 좌면 높이조절을 위해 기 립보조의자를 제작하고 힙업보조가 없는 상태에서 기립동작 시의 대퇴직근의 근전도 최대값을 측정하였다. 동시에 3차 원 동작 측정시스템을 이용하여 대퇴각도를 측정하였다. 이 결과, 좌면의 초기 위치가 높을수록 근전도의 최대값은 감소 하는 것을 보였고, 기립보조에 효과적인 것도 알 수 있었다.
두번째로 대퇴의 초기각도가 7도, 14도, 21도로 하는 좌 면의 초기높이에 따라, 기립시 근전도의 최대값이 나타나는 대퇴각도를 분석하였다. 이 결과 초기높이에 관계없이 대퇴 의 상대각도가 15도 이하에서 근전도의 최대값이 나타났다.
따라서 본 연구에서는 힙업기능을 위한 힙업기구의 좌면 상 승각도는 15도로 설정하고, 설계 및 제작하였다.
세번째로 힙업기능을 적용하였을 때 기립보조에 대한 생체 역학적 분석을 시도하였다.그 결과, 힙업 기능은 기립보조에 효과적이다는 것을 알 수 있었다. 다만, 일부 피험자에 있어 서 초기 대퇴각도가 21도일 때는 유의한 차이는 나타나지 않 았다. 이것은 좌면의 초기 위치가 높을 때 기립보조의 효과 보다는 개인의 신체특성이나 기립동작의 자세에 의존성이 크 기 때문이라고 판단된다. 그러나 근전도의 최대값은 평균적 으로 감소하는 것을 확인 할 수 있었다.
결론적으로 높이조절이 가능한 기립보조의자는 기립 동작 시, 보다 적은 근력으로 기립보조가 가능하며, 힙업기능도
기립보조에 효과적인 것을 알 수 있었다.
본 논문에서는 높이조절을 3단계로만 설정하여 기립보조 에 대한 평가를 수행하였다. 향후에는 다양한 높이에서 힙업 기능과 연동하였을 때의 기립동작을 분석할 필요가 있다. 이 를 바탕으로 사용자의 기립동작의 특성을 고려한 최적의 기 립보조의자에 대한 연구를 진행할 예정이다.
참고문헌
[1] B. Garrett, D. Singiser, and S.M. Banks, “Back injuries among nursing personnel: The relationship of personal char- acteristics, risk factors, and nursing practices,” J. AAOHN, vol. 40, no. 11, pp. 510-516, 1992.
[2] ISO, ISO 9999 Assistive products for persons with disability - Classification and terminology, 2007.
[3] K. Fogg, “Stand-aid invalid wheel-chair,” United States Patent, no. 4119164, 1978.
[4] E. Perry, “Power stand-up and reclining wheelchair,” United States Patent, no. 53366036, 1994.
[5] C.C. Auel, “All-purpose rocking, swiveling, reclining, and lifting chair,” United States Patent, no. 5,024,486, 1991.
[6] E.D. Hendreson, “Elevator chair apparatus,” United States Patent, no. 5165753, 1992.
[7] S. Komura, T. Kaneda, K. Yanashia, K. Adachi and I.
Mizuseki, “Elevation chair,” United States Patent, no.
6783179-B2, 2004.
[8] J. Keegan, “Alterations of the lumbar curve related to posture and seating,” J. Bone Joint Surg. Am., 53-A, pp. 589-603, 1953.
[9] E.A. Clancy, “Electromyogram amplitude estimation with adaptive smoothing window length,” IEEE Trans., Biomed.
Eng., vol. 46, no, 6, pp. 717-729, 1999.
[10] Y. Hirata, J. higuchi, T. Hatsukari and K. Kosuge, “Sit-to- stand assist system by using handrail and electric bed moving up and down,” Proc. IEEE/RAS-EMBS Int’l. Conf. on Biomed. Rob. and Biomech., pp. 187-192, 2008.
[11] J.H. Bae, G.S. Kim, J.C. Ryu, and I. Moon, “Design and Con- trol of Seat Mechanism for Multi-postures Controllable Wheelchair,” J. the KSPE, Vol. 27, No. 5, pp. 102-111, 2010.
[12] A. Cappozzo, F. Catani, A. Leardini, M.G. Benedetti, U. Del- laCroce, “Position and orientation in space of bones during movement: experimental artifacts,” J. Clin. Biomech., vol.
11., no. 2, pp. 90-100, 1996.
[13] D.B. Jenkins, Hollinshead’s Functional Anatomy of the Limbs and back 8/e, Philadelphia, Pa: Saunders, pp. 423-437, 2002.
[14] E.B. Hutchinson, P.O. Riley, and D.E. Krebs, “A dynamic analysis of the joint forces and torques during rising from a chair,” IEEE Trans. on Rehab. Eng., vol. 2, no. 2. pp. 49-55, 1994.
[15] http://sizekorea.kats.go.kr.