1. 서론
공간정보 유형이 다양해짐에 따라 활용성이 증가하 여 데이터 구축에 대한 중요도가 부각되고 있다. 최근
에는 토지 이용 및 관리, 지도 서비스 제공 등 공공 부문 뿐만 아니라 민간 부문에서도 공간정보 활용이 증가하 고 있다. 특히 일상생활이나 특정 상황에서 행동을 판 단할 때 공간정보를 활용하면 중요한 기본정보 및 기준
https://doi.org/10.7780/kjrs.2020.36.5.4.7 ISSN 2287-9307 (Online)
Article
재난현장 모니터링을 위한 UAV 영상 신속 지오코딩
노현주 1)·신동윤1)·손홍규2)·김성삼 3)†
Fast Geocoding of UAV Images for Disaster Site Monitoring
Hyunju Nho
1)·Dong Yoon Shin
1)·Hong-Gyoo Sohn
2)·Seongsam Kim
3)†Abstract:
In urgent situations such as disasters and accidents, rapid data acquisition and processing is required. Therefore, in this study, a rapid geocoding method according to EOP (Exterior Orientation Parameter) correction was proposed through pattern analysis of the initial UAV image information. As a result, in the research area with a total flight length of 1.3 km and a width of 0.102 km2, the generation time of geocoding images took about 5 to 10 seconds per image, showing a position error of about 8.51 m. It is believed that the use of the rapid geocoding method proposed in this study will help provide basic data for on-site monitoring and decision-making in emergency situations such as disasters and accidents.Key Words:
UAVs, Drone Mapping, Image geocoding, Disaster management요약 : 재난·사고와 같은 긴급한 상황에서는 신속한 데이터 획득 및 처리가 필요하다. 이에, 본 연구에서는 UAV 영상 초기정보의 패턴분석을 통해 외부표정요소 보정에 따른 신속 지오코딩 방법을 제안하였다. 그 결과, 총 비행길이1.3 km, 넓이 0.102 km2의 연구지역에서1개의 GCP를 활용하였을 때, 지오코딩 영상의 생성시간은 1장당 약 5~10초가 소요되었고, 약 6.91 m의 위치오차를 나타내었다. 본 연구에서 제안하는 신속 지오코딩 방 법을 활용하면, 재난·사고 현장과 같은 긴급 상황에서 현장 모니터링 및 의사결정을 위한 기초자료 제공에 도 움이 될 것으로 판단된다.
Received October 2, 2020; Revised October 26, 2020; Accepted October 27, 2020; Published online October 28, 2020
1)
행정안전부 국립재난안전연구원 연구원 (Researcher, National Disaster Management Research Institute, MOIS)
2)
연세대학교 건설환경공학과 교수 (Professor, Civil and Environmental Engineering, Yonsei University)
3)
행정안전부 국립재난안전연구원 시설연구사 (Researcher Officer, National Disaster Management Research Institute, MOIS)
†Corresponding Author: Seongsam Kim ([email protected])
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License
(http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in
any medium, provided the original work is properly cited.
제시가 가능하다.
현재 공간정보 데이터 수집은LiDAR, 위성, UAV 등 다양한 플랫폼을 통해 이루어지고 있다. 이러한 플랫폼 중 특히UAV는, 실시간 데이터 획득이 가능하고 비용 및 투입 인력이 비교적 효율적일 뿐만 아니라 위험지역 및 난접근 지역에 투입 가능하여 고해상도 영상취득이 가능하다는 점 등을 통해 많은 관심을 받고 있다. UAV 에 카메라를 탑재하여 취득한 데이터를GPS/INS 센서 로부터 획득한 위치/자세 정보를 통해 지오레퍼런싱 과정을 거치면 다양한 공간정보 도출이 가능하며(Choi and Lee, 2009), 이는 농업, 산림, 토목, 환경, 재난관리 등 많은 분야에서 활용가능하다.
UAV 영상을 활용하여 공간정보를 생성하는 연구로 는SIFT와 SfM 기법을 이용해 UAV 항공사진측량방법 으로 소규모 지형에 대한 정사영상과 수치지도를 제작 한 연구(Lim, 2016), 임업 및 농업에 저가 UAV 시스템 사용의 잠재력을 확인하기 위하여GCP와 저가 GPS/
IMU로 획득된 위치/자세정보를 사용해 지오레퍼런싱 한 연구(Grensdorffer et al., 2008), UAV 영상과 기준 데이 터를 이용하여 정밀 정사영상을 생성하고 생성한 정사 영상으로부터 정보를 얻어 내진 평가에 활용한 연구 (Gao et al., 2017) UAV 영상을 이용하여 효율적으로 시 설물을 점검하기 위해 기준 영상 기반 개별 정사영상 생 성 방법을 제안하고 정확도를 검증한 연구(Kim, 2018) 등 이 진행되었다. 또한, 재난 분야에서는 실시간 모니터링 을 위한 소형 드론 기반 공중감시체계 제안(Zaheer et al., 2016.), 실시간 비디오 중계 장비를 탑재하여 모니터링 시스템 구축 및 감시, 구조 활동에 적용하는 연구(Sharma et al., 2016) 등 실시간 현장정보를 획득하기 위하여 UAV 기반의 연구들이 진행되고 있다.
선행연구들은 높은 정확도 확보를 통해 농업, 해양, 건축, 재난관리 등 다양한 분야에서 정밀한 분석에 활 용하는 것을 목적을 가지고 진행되었다. 본 연구에서는 UAV 활용성이 높게 평가되는 다양한 분야 중, 현장 모 니터링 및 신속한 초동조치가 필요한 재난관리 분야에 초점을 두고 외부표정요소 보정에 따른 신속UAV 영상 지오코딩 방법을 제안하고자 한다.
2. 연구방법
1) 연구 방법 및 연구지역
본 연구에서 제안하는UAV 영상 신속 지오코딩은 다 음과 같은 단계로 나누어 수행하였다. 첫 번째 단계로, 취득된 영상의 초기정보인GPS/INS 센서로부터 획득 한 위치/자세 정보의 패턴분석을 수행하여 정오차 성분 과 부정오차 성분으로 나누었고, 두 번째 단계로 보정 하는 성분을 다르게 하여 영상의 위치정확도를 분석하 였다. 마지막으로는 보정하는 성분에 따라 최소한의 지 상기준점을 활용하여 수행 결과를 분석하였다(Fig. 1).
해당 연구는Fig. 2와 같이 울산에 위치한 국립재난안 전연구원 주변을 대상으로 데이터를 취득하여 수행하
Fig. 1. Flowchart of fast geocoding processing.
Fig. 2. Research site.
였으며, UAV의 총 비행길이는 약 1.3 km이고 해당 지역 의 넓이는 약0.102 km2이다.
2) 활용장비
본 연구에서 활용한UAV은 DJI社의 Inspire 1 pro (Fig. 3)로, 사양은 Table 1에 나타내었다. DJI Inspire 1 pro 는 소형급 회전익UAV로 실내에서도 안정적인 비행이 가능하며, 스마트폰 앱을 활용한 경로지정 자동 비행이 가능하다. 항공촬영을 위하여 사용한 카메라는 해당 UAV에 장착 가능한 Zenmuse X5(Fig. 4)로, 4,608×3,456 pixel의 영상촬영이 가능하며 자세한 사양은 Table 2와 같다.
3) UAV Dataset
UAV 영상은 120m의 고도에서 53장의 영상을 획득
하였으며 이 때의GSD는 1.09 cm/pixel 이다. 그 중, GCP 측량을 위해 설치한 타겟이 촬영된 영상인26장의 영상 만 활용하였다. 각 영상은 EXIF(Exchangeable Image File) JPEG 전자 파일 포맷으로 저장되며, 영상의 메타 데이터에는 기본정보인 사진의 크기, 사진 촬영날짜, 조 리개, ISO, 카메라 모델명뿐만 아니라 영상촬영 시 초점 거리, UAV에 탑재된 GPS 위·경도 좌표, 비행고도, 자세 각에 대한 정보가 포함되어 있다.
4) 지상기준점 측량
지상기준점은 실험 수행 및 결과의 정확성을 평가하 기 위해 취득하였다. 실험 전 연구대상지에 UAV로 획 득한 영상에서 식별할 수 있는 타겟을 미리 설치하였으 며(Fig. 5), 실험에 사용된 타겟은 Fig. 6과 같다. 타겟 설 치 후, RTK(Real-Time Kinematic) 방식에 의한 고정밀
Table 1. Specification of Inspire 1 Pro
Max speed 18m/s (ATTI mode)
Max flight Time Approx. 15 minutes
Max service ceiling above sea level 4,500 m
Max tilt angle 35°
Hovering accuracy (P mode) Vertical : 0.5m / Horizontal : 2.5m
Weight 2870 g
Table 2. Specification of Zenmuse X5
Camera model Zenmuse X5
Lens DJI MFT 15 mm f/1.7 ASPH
Image sensor Sony EXMOR 1/23″ (W: 6.30 mm, H: 4.72 mm)
Focal length 15mm
Aperture F1.7 (Max) – F16 (Min)
Focus distance 0.2 m ~ ∞
FOV 72°
Mass 115 g
Fig. 4. Zenmuse X5.
Fig. 3. Inspire 1.
Fig. 6. Used groud targets.
Table 3. Coordinates of GCPs and CPs
Label Longitude (°) Latitude (°) Height (m) Precision (m)
Hori. Vert.
GCP1 129.3161069 35.56530898 89.686 0.007 0.010
GCP2 129.3164692 35.56542379 94.688 0.008 0.010
GCP3 129.3171091 35.56557195 95.711 0.006 0.009
GCP4 129.3156629 35.56557858 93.511 0.008 0.012
GCP5 129.3166514 35.56593533 96.9 0.008 0.012
GCP6 129.3167772 35.56632464 100.235 0.010 0.016
GCP7 129.3160451 35.56591322 96.893 0.005 0.008
GCP8 129.316522 35.56614306 113.031 0.005 0.008
GCP9 129.3157289 35.56617127 99.905 0.006 0.009
GCP10 129.3165824 35.56642865 101.105 0.004 0.006
GCP11 129.3156117 35.56638095 100.338 0.005 0.008
GCP12 129.316445 35.5666089 100.969 0.014 0.023
GCP13 129.3155051 35.56660127 105.116 0.005 0.008
GCP14 129.3160506 35.56688399 105.185 0.007 0.009
GCP15 129.315475 35.56688541 105.567 0.006 0.009
CHK1 129.3163104 35.56546821 90.535 0.006 0.009
CHK2 129.3168322 35.56550314 95.421 0.007 0.011
CHK3 129.316033 35.56566699 94.672 0.006 0.009
CHK4 129.3163481 35.56572201 96.156 0.007 0.010
CHK5 129.3169585 35.56606163 98.742 0.006 0.009
CHK6 129.3159106 35.56586854 96.855 0.005 0.007
CHK7 129.3162874 35.5660455 112.991 0.005 0.007
CHK8 129.3160567 35.56619615 100.172 0.006 0.009
CHK9 129.3158754 35.566452 100.69 0.009 0.014
CHK10 129.3158057 35.56678259 105.266 0.008 0.010
CHK11 129.3157785 35.56709049 106.717 0.004 0.007
Fig. 5. Location of GCPs survey.
GNSS 측량을 통해 총 26점을 획득하였다. Table 3은 GCP의 좌표를 나타내었다.
3. UAV 영상 신속 지오코딩
1) GPS/INS 센서 데이터 분석
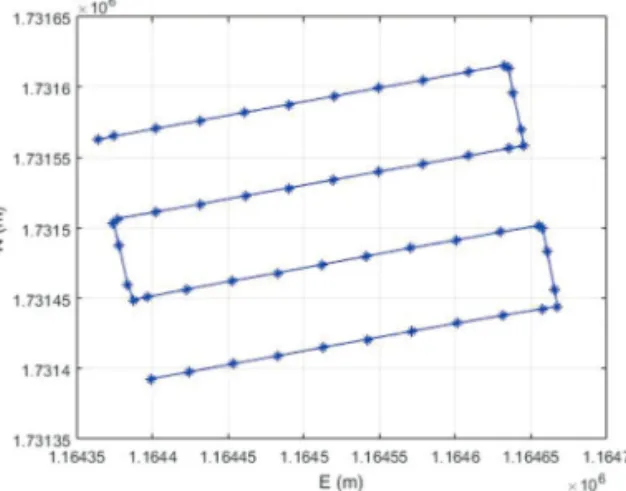
신속 지오코딩의 첫 번째 단계로, UAV 자체에서 제 공하는GPS/INS 센서 데이터 분석을 수행하였다. 아래 Fig. 7은 UAV 비행경로에 따른 영상촬영 위치(X, Y)를 나타낸다. Fig. 8은 x 및 y 방향으로의 회전량(roll, pitch) 을 나타내며, Fig. 9는 UAV의 높이와 z 방향으로의 회 전량(Z, yaw)으로, 카메라가 어느 방향을 향하고 있는 지 즉, 북쪽 방향으로부터 얼마나 틀어져 있는지를 나 타낸다.
취득한GCP를(GCP1~GCP15) 활용하여 번들조정을
수행하여 위의 초기EOP 보정을 실시하였다. 그 결과 Fig. 10, Fig. 11, Fig. 12와 같이 x, y축 회전량은 부정오차 (random error) 형태를 보인 반면 z, k는 정오차(systemetic error) 형태를 보였다. 이처럼 표정요소별 오차 패턴을 분석하여, 보정하는 표정요소를 다르게 하여 실험조건 을Table 4와 같이 설정하였다.
2) 보정요소별 정확도 분석
신속 지오코딩의 두 번째 단계로, 보정하는 내·외부 표정요소별 정확도 분석을 수행을 위해Table 4와 같이 총10개의 실험조건으로 나누었다. 각 실험조건별 이 론상 필요한GCP 개수는 최대 6개이며, 실험조건마다 8개의 GCP가 있다고 가정하여 실험하였다. 우선 한 영 상을 대상으로 결과를 도출하였고, 실험에 사용된 영상 은GCP가 8개 이상 찍힌 영상을 활용하였다.
Fig. 8. Roll and pitch. Fig. 9. Height and yaw.
Fig. 7. UAV flight trajectory (X, Y).
각 실험조건 별로Single Photo Resection을 수행하기 위해Taylor 급수를 사용하여 공선 조건 방정식을 선형 화하고 최소제곱법을 사용하였다. 아래 방정식은 Case 4에 해당하는 계산과정을 예시하고 있다.
(1)
y = Ax (2) x = (ATPA)-1ATPy (3) 실험조건별 각 요소들을 보정한 후, 검사점을 통해 Fig. 11. Roll, Pitch calibration. Fig. 12. Height, Yaw calibration.
Fig. 10. X, Y calibration.
Table 4. Corrected Parameters by each case and theoretically required number of GCPs
Parameters Theoretically required number of GCPs Case 1 EOP, f, xp, yp, k1, k2 6
Case 2 EOP, f, xp, yp 5
Case 3 EOP, f 4
Case 4 EOP 3
Case 5 X, Y, Z 2
Case 6 X, Y, Z, κ 2
Case 7 ω, φ, κ 2
Case 8 X, Y, κ 2
Case 9 X, Y 1
Case 10 Z, κ 1
확인한 최종 위치오차는Table 5과 같다. 아래 결과를 살 펴보면GCP를 3개 사용하여 EOP만 보정한 Case 4 경 우cm 단위의 오차를 가지는 것을 확인할 수 있었으며, 2개를 사용하여 값만 보정하여도 cm 단위의 오차를 가 지는 것을 확인하였다. 또한, GCP를 1개만 가지고도 값 을 보정하여 약3.7 m 정도의 오차를 보였다.
3) GCP 개수에 따른 정확도 분석
마지막 단계로, 재난현장에서 GCP 측량 작업량을 최 소화하기 위해GCP 개수에 따른 정확도를 분석하고자 하였다. Table 4의 이론상으로 필요한 GCP 개수가 3개, 2개, 1개에 해당하는 실험조건 중, Table 5에서 비교적 좋은 결과를 나타낸4, 6, 10 실험조건에 대해 전체 영상 에 대한 위치오차 결과를 살펴보고자 하였다. 재난·사 고 현장에서의 데이터 분석시간 단축을 위하여 모든 영 상을 보정하는 대신, 처음 기준영상(7번 영상)만 보정을 수행하고 계산된 보정량을 나머지 모든 영상에 일률적 으로 적용하였다. 적용 결과를 바탕으로 이중 선형보간
법으로 최종적인 지오코딩 영상 생성을 생성하였다. 생 성된 영상의 포맷은Geotiff, 크기는 7 mb, 한 장당 생성 시간은5~10초가 소요되었다.
GCP가 3개라고 가정한 Case4의 경우, GCP15, GCP13, CHK10을 사용하였고, 2개로 가정한 경우에는 GCP15, GCP13, 1개로 가정한 경우에는 GCP13이 사용되었으 며 각각의GCP의 위치는 Fig. 13과 같다.
Table 5. RMSE by each case
Case Parameters RMSE [x (m) / y (m)]
Case 1 EOP,f, xp, yp, k1, k2 rms = [ 0.183 / 0.312 ] Case 2 EOP, f, xp, yp rms = [ 0.106 / 0.249 ] Case 3 EOP, f rms = [ 0.059 / 0.086 ] Case 4 EOP rms = [ 0.070 / 0.091 ] Case 5 X, Y, Z rms = [ 2.324 / 1.908 ] Case 6 X, Y, Z, κ rms = [ 0.307 / 0.328 ] Case 7 ω, φ, κ rms = [ 90.272 / 83.737 ] Case 8 X, Y, κ rms = [ 445.405 / 119.905 ] Case 9 X, Y rms = [ 98.232 / 99.938 ] Case 10 Z, κ rms = [ 3.676 / 2.671 ]
(a) Case 4 (b) Case 6 (c) Case 10
Fig. 13. Location of GCPs by each case.Table 6. Correction by each parameter (Case 4)
Correction parameter Correction value
ΔX 6.6282 m
ΔY -0.7649 m
ΔZ 84.3671 m
Δω 0.3827 deg
Δφ -1.5689 deg
Δκ -5.1871 deg
Table 7. RMSE of geocoded images (Case 4)
#Image Error (m) #Image Error (m)
7 0.569 20 2.943
8 0.664 35 1.488
9 1.124 36 1.075
10 1.362 37 0.867
11 1.867 38 1.164
12 2.335 39 1.053
13 5.108 40 2.200
14 5.948 41 5.352
15 1.903 42 4.583
16 2.220 44 1.207
17 2.521 45 0.926
18 2.502 46 0.938
19 2.841 47 1.250
(1) Case 4의 정확도 분석
Case 4는 GCP 3개를 사용하여 영상의 외부표정요 소를 보정하였다. 외부표정요소의 보정량은 Table 6과 같으며 이를 다른 영상에 일률적으로 적용하였다. 생 성된 지오코딩 영상 상의 검사점을 활용하여 정확도를 평가한 결과, Table 7과 같이 약 2.154 m의 위치오차를 보였다.
(2) Case 6의 정확도 분석
Case 6은 GCP 2개를 사용하여 영상의 를 위와 같은 방법으로 보정하여 나머지 영상에 적용하였다. 각 파라 미터의 보정량은Table 8과 같으며 이를 다른 영상에 일 률적으로 적용하였다. 생성된 지오코딩 영상들을 검사 점으로 확인한 결과, Table 9와 같이 약 1.965 m의 위치 오차를 보였다.
(3) Case 10의 정확도 분석
Case 10은 GCP 1개를 사용하여 영상의 를 보정하여 나머지 영상에 일률적으로 적용하였다. 각 파라미터의
보정량은Table 10과 같으며 생성된 지오코딩 영상들을 검사점으로 확인한 결과, Table 11과 같이 약 6.911 m의 위치오차를 보였다.
Case 10의 과정을 통해 최종적으로 생성된 지오코딩 영상을QGIS Daum API 지도 위에 중첩하였으며 그 결 과는Fig. 14와 같다. Fig. 14에서도 볼 수 있듯이, GCP 한 점을 가지고Z, κ 값만을 보정하더라도 신속하게 재난 현장을 모니터링하거나 현장에서 의사결정을 위한 자 Table 8. Correction by each parameter (Case 6)
Correction parameter Correction value
ΔX 3.5512 m
ΔY 0.0057 m
ΔZ 84.4090 m
Δκ -5.1678 deg
Table 9. RMSE of geocoded images (Case 6)
#Image Error (m) #Image Error (m)
7 0.137 20 2.419
8 0.462 35 1.183
9 0.677 36 0.848
10 0.973 37 0.827
11 1.713 38 1.062
12 2.211 39 0.904
13 4.956 40 1.916
14 5.869 41 5.166
15 1.789 42 4.145
16 2.113 44 1.290
17 2.368 45 1.034
18 2.241 46 1.093
19 2.423 47 1.266
Table 10. Correction by each parameter (Case 10)
Correction parameter Correction value
ΔZ 96.4383 m
Δκ -19.2420 deg
Table 11. RMSE of geocoded images (Case 10)
#Image Error (m) #Image Error (m)
7 7.966 20 9.653
8 7.946 35 11.582
9 5.980 36 7.492
10 2.833 37 9.082
11 7.340 38 8.337
12 6.944 39 4.970
13 5.261 40 5.128
14 3.904 41 6.017
15 4.741 42 7.704
16 6.179 44 6.367
17 8.497 45 6.126
18 5.488 46 7.141
19 5.417 47 11.597
Fig. 14. Overlay of geocoded images on daum map.
료로 활용하기에 적절한 정확도를 확보하고 있음을 알 수 있었다.
4. 결론
최근UAV는 국내외 다양한 연구로 인해 공간정보 획득이 필요한 여러 분야에서 활용성이 높게 평가되고 있다. 특히 사람이 접근하기 어려운 지역에 투입 가능 하고, 광범위한 지역 데이터 획득이 가능하므로 재난관 리 분야에서도 그 활용성이 확대되고 있다.
본 연구에서는 이러한 재난관리 분야에서의 현장 모 니터링 및 의사결정 등 초동보고를 위한 기본자료 생성 에 목적을 두고, UAV 영상 신속 지오코딩에 대한 연구 를 수행하였다. 신속 영상 지오코딩을 위해 첫째, GPS/
INS 센서에서 얻은 UAV의 초기 위치/자세 정보를 분 석하였고, 둘째, 분석결과를 토대로 보정요소별 위치정 확도를 검토하였으며, 마지막으로 최소한의 GCP 개수 를 사용한 결과에 대해 정확도를 분석하였다. 그 결과, 총 비행길이1.3 km, 넓이 0.102 km2의 연구지역에 대해 지오코딩 영상의 생성시간은1장당 약 5~10초가 소요 되었고, 1개의 GCP를 사용하여 와 값만 보정 하더라도 약6.91 m의 정확도를 확보할 수 있음을 확인하였다. 이 러한 결과는 재난·사고 등 긴급한 상황에서 의사결정 및 현장 모니터링을 위한 기초자료로 활용 가능할 것으 로 판단된다. 향후 신속한 데이터 생성과 더불어 정확 도를 향상시키는 연구 및PPK, RTK 드론을 도입하여 최소한의GCP를 활용하거나 GCP 없이 UAV 영상을 지오코딩하는 연구가 필요하다고 판단된다.
사사
본 연구는 행정안전부 국립재난안전연구원의 주요 사업(재난원인 현장 감식 기술개발(NDMI-주요-2020- 06-01))의 지원으로 수행되었습니다.
References
Choi, K. A., and Lee, I. P., 2009. Image Georeferencing
using AT without GCPs for a UAV-based Low- Cost Multisensor System, Journal of the Korean Society of Surveying, 27(2): 249-260 (in Korean with English abstract).
Gao, M., Xu, X., Klinger, Y. Woerd, J. V. D., and Tapponnier, P., 2017. High-resolution mapping based on an Unmanned Aerial Vehicle(UAV) to capture paleoseismic offsets along the Altyn- Tagh fault, China, Scientific Reports, 7(1): 1-11.
Grensdorffer, G. J., Engel, A. and Teichert, B., 2008.
The Photogrammetric Potential of Low-cost UAVs in Forestry and Agriculture, International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, ISPRS, Beijing, China, 37: 1207-1213.
Kim, H. Y., Choi, K. A., and Lee, I. P., 2018. Drone Image-Based Facility Inspection – Focusing on Automatic Process Using Reference Images, The Korean Society for Geospatial Information Science, 26(2): 21-32 (in Korean with English abstract).
Lim, S. B., 2016. Geospatial Information Data Generation Using Unmanned Aerial Photogrammetry and Accuracy Assessment, Department of Civil Engineering, Graduate School Chungnam National University, Daejeon, Korea.
Seong, J. H., Lee, K. R., Han, Y. K., and Lee, W. H., 2019. Geometric Correction of None-GCP UAV Orthophoto Using Feature Points of Reference Image, Korean Society for Geospatial Information Science, 27(6): 27-34 (in Korean with English abstract).
Sharma, S., A. Muley, R. Singh, and A. Gehlot, 2016. UAV for Surveillanve and Environmental Monitoring, Indian Journal of Science and Rechnology, 9(4):
1-4.
Zaheer, Z., a. Usmani, E. Khan, and M.A. Qadeer, 2016.
Aerial surveillance system using UAV, 2016 Thirteenth International Conference on Wireless and Optical Communications Networks, pp. 1-7.




![Table 5. RMSE by each case Case Parameters RMSE [x (m) / y (m)]](https://thumb-ap.123doks.com/thumbv2/123dokinfo/5308623.381922/7.892.101.434.118.384/table-rmse-by-each-case-case-parameters-rmse.webp)

