1) Combined Master's and Doctoral Program Student, Department of Regional Infrastructure Engineering, Kangwon National University 2) Ph.D. Candidate, Department of Regional Infrastructure Engineering, Kangwon National University
영상정보를 활용한 사면 붕괴 토사량 산정 기법
Soil Volume Computation Technique at Slope Failure Using Photogrammetric Information
타망 비벡
1)
・ 임 현 택2)
・ 김 기 환3)
・ 장 석 현4)
・ 김 용 성†
Tamang Bibek ・ Hyuntaek Lim ・ Jihuan Jin ・ Sukhyun Jang ・ Yongseong Kim
Received: October 17
th, 2018; Revised: October 22
nd, 2018; Accepted: October 31
st, 2018
ABSTRACT : The uses of unmanned aerial vehicles (UAV) have been expanding in agriculture surveys, obtaining real time updates of dangerous facilities where human access is difficult, disaster monitoring, and 3D modeling. In reality, there is an upsurge in the application of UAVs in fields like, construction, infrastructure, imaging, surveying, surveillance and transportation. Especially, when the slope failure such as landslide occurs, the uses of UAVs are increasing. Since, the UAVs can fly in three dimensions, they are able to obtain spatial data in places where human access is nearly impossible. Despite of these advantages, however, the uses of UAVs are still limited during slope failure. In order to overcome these limitations, this study computes the soil volume change during slope failure through the computation technique using photogrammetric information obtained from UAV system. Through this study, it was found that photogrammetric information from UAV can be used to acquire information on amount of earthworks required for repair works when slope collapse occurs in mountainous areas, where human access in difficult.
Keywords : Unmanned aerial vehicle (UAV), Slope failure, Virtual survey tool (VST), Ground control points (GCP), Soil volume computation
요 지 : 최근 무인항공시스템의 활용으로 농작물 작황조사, 접근위험지역의 시설물 현황조사, 재해재난 모니터링 및 3차원 모델링 등 그 활용 분야가 확대되고 있는 실정이며, 건설, 인프라, 영상, 측량, 농업, 감시, 수송 등 실제로 여러 분야로 활용사례가 계속 늘어나고 있다. 특히, 산사태와 같은 사면 붕괴 발생 시 무인항공시스템 적용에 대한 시도가 많아지고 있으며, 무인항공시스템은 3차원 비행이 가능하기 때문에 접근하기 어려운 공간 정보를 확인할 수 있다. 하지만, 이러한 장점에도 불구하고 사면 붕괴 발생 시 무인항공시스템 활용은 아직도 제한적인 실정이다. 본 연구에서는 이러한 한계성 극복을 위하여 사면 붕괴로 인한 토사량을 무인항공시스템의 영상정보로 산정하는 기법을 고찰하였다. 본 연구를 통해 산악지역 등 접근이 어려운 지역에서 사면 붕괴 발생 시 복구공사에 필요한 토사량의 정보를 취득하는데 무인항공시스템 영상정보를 활용할 수 있을 것으로 판단된다.
주요어 : 무인항공기, 사면붕괴, 가상측량 프로그램, 지상관측점, 토사량 산정 Journal of the Korean Geo-Environmental Society
19(12): 65~72. (December 2018) http://www.kges.or.kr
ISSN 1598-0820 DOI https://doi.org/10.14481/jkges.2018.19.12.65
1. 서 론
무인항공시스템(Unmanned Aerial Vehicle System)은 그 활용성이 증가되고 있고, 공간데이터 수집 및 긴급 대응상 황에서 유용하게 사용될 수 있으며, 향후 재난 관리를 위한 모니터링과 농작물의 비료 배포와 작황조사 그리고 접근위 험지역의 시설물 현황조사와 3D 모델링 등 활용 분야가 확 대될 것으로 될 것으로 예상되고 있다.
최근 공간정보 산업의 급속한 발전에 따라 현실을 재현 한 3차원 공간정보 사업의 수요가 증대되고 있으나 공간정 보자료의 갱신에 의한 최신정보의 시간 및 비용 증가에 따
라 경제성 및 효율성의 문제가 대두되고 있다. 이에 따라 경제적이고, 효율적인 자료의 취득을 통하여 공간정보 서비 스의 질적인 향상을 위한 많은 연구가 진행되고 있다.
Kim et al.(2018)은 무인항공시스템을 활용하여 저수지 에 대해 촬영하고, 실영상과 열영상 자료를 취득하여 모델 저수지의 정밀안전진단 자료와 비교 분석한 결과 거의 일치 하였고, 저수지 제체 위험도 분석이 가능하여 효율적인 저 수지 현장조사 기법임을 확인하였다.
Park et al.(2015)는 무인항공기(Unmanned Aerial Vehicle, 이하 UAV)는 기존의 위성과 항공 영상으로 얻기 힘든 일 정 지역정보를 짧은 시간에 관측 가능하고 같은 장소를 반
Fig. 1. eBee (UAV) drone
Fig. 2. Sony WX RGB camera
복해서 주기적으로 관측이 가능하여 시간변화 파악이 가능한 장점을 활용하여 경북 영천에 위치한 괴연저수지를 대상 으로 UAV를 이용한 정밀지형도 작성 및 활용 방안을 제시 하였다.
Jeong(2014)은 저수부 하상 측정에 ADCP 센서를 장착한 무선조종 하천조사보트를 이용하여 3차원 저수부 하상지형 자료를 취득하고 고수부 지형자료 취득에 사진측량 장비를 장착한 UAV를 이용하여 구성된 3차원 하천지형으로 단절 부 없이 고수부와 저수부가 연결된 하천 종・횡단 정보를 추 출하였다.
Kim et al.(2014)는 무인항공기의 국토모니터링 분야 적 용가능성을 평가하였으며, 재난재해분야 적용 가능성을 확 인하기 위하여 그 정확도를 평가하였다.
Cho(2014)는 UAV를 이용한 정사영상제작의 정확도 평 가 및 경제성 분석을 연구하여 항공측량에 비해 UAV 측량 은 접근 불가 지역과 기후의 영향이 많은 소규모 지역에 대 하여 많은 이익이 있음을 확인하였다.
Tahar et al.(2011)는 UAV를 이용한 대축척 지도제작연구 를 수행하였으며, Lambers et al.(2007), Püschel et al.(2008) 등은 UAV를 이용하여 문화재 모델링 및 문화재 영상자료 취득관련 연구를 수행하였다.
현재 제공되고 있는 위성사진과 항공사진은 넓은 지역을 다룬다는 장점이 있지만, 소규모 사면 붕괴 또는 산사태 발 생 현장 등의 소규모 지역의 지형정보를 추출하기에는 쉽지 않은 것이 현실이다.
본 연구에서는 산악지역 등 접근이 어려운 지역에서 사 면 붕괴 발생 시 복구공사에 필요한 토사량 정보를 산정하 는데 무인항공시스템을 활용하기 위한 기법을 고찰하였다. 본 연구를 통해 무인항공시스템이 산사태 및 사면 붕괴 등 의 복구공사 시 필요한 정보 추출 등 재난관리에 신속하고 경제적으로 활용할 수 있을 것으로 기대된다.
2. 영상데이터를 활용한 데이터 추출
2.1 데이터 변환
본 연구에서 사용한 무인항공기는 Fig. 1과 같이 고정익 타입으로 크기는 950 × 630 × 70mm, 무게는 배터리와 카 메라가 없을 때 0.41kg이고 배터리와 카메라를 포함할 때 0.69kg이며 프로펠러는 1개로 구성되어 있다.
촬영 광학센서는 Fig. 2와 같이 Sony DSC-WX220_4.4_
4896x3672(RGB)(1,820만 화소)를 이용하였고, 좌표 취득 을 위하여 Sokkia사의 GRX2를 사용하여 지상기준점의 현 장측량을 실시하였다.
UAV는 자동 항로 설정 S/W인 eMotion 2를 이용하여 경 로를 설정하였고, 설정된 비행경로에 따라 대상 지역의 촬 영을 하였다.
촬영 진행 시 작업자는 USB 지상모뎀을 통해 노트북 화 면으로 UAV의 실시간 비행 현황을 파악하며, 현장 기상상 태에 따라 촬영 중첩도를 설정할 수 있다. USB 지상모뎀의 허용범위는 약 3km 범위이다.
취득영상의 왜곡 방지는 현장의 지상기준점 조사를 실시 하여 기준점의 좌표를 GPS 측량을 통하여 획득하고, 취득 한 각 점의 좌표를 기준으로 촬영 사진 접합 시 임의의 점 들의 좌표를 생성하게 되어 3D모델의 좌표를 보정하게 된 다. GPS 측량성과는 후처리방법을 통하여 3D모델의 오차 범위를 줄이는 데에 사용된다.
Pix4Dmapper와 Virtual Surveyor를 통해 2D 평면도 및 3D 지형도를 작성한다. 먼저, 전처리 과정에서는 eMotion2 소프트웨어로 UAV 측량 데어터와 비행 로그 파일을 결합 하여 .p4d 파일을 생성한다. Pix4Dmapper 소프트웨어는 전 처리된 .p4d 파일을 통해 후처리한다. 후처리 과정에는 3D 지형모델 생성과 Virtual Surveyor 소프트웨어에 필요한 DSM 파일과 모자이크 파일을 제작한다.
다음으로 Pix4Dmapper로 제작된 DSM 파일과 모자이크
Fig. 3. Data obtaining and processing flow chart
파일을 통해 Virtual Surveyor 소프트웨어로 3D지형모델을 생성한다. GEOID사의 Virtual Surveyor는 가상측량 프로그 램으로 여러 레이어들을 겹쳐서 볼 수 있으며, 정사영상의 TIF 이미지와 DEM 수치표고데이터를 결합한 상태에서 3 차원적 모델링 작업이 가능하다. 또한, 벡터라이징 작업도 3차원 뷰어기능을 이용하여 다각도로 영상화면을 실시간 상하좌우로 이동이 가능하기 때문에 현장에 있는 것과 동일 한 상황을 만들어 내고 일반 모니터에서도 3차원 입체 시 판독이 가능하므로 UAV를 활용한 지도 제작에 많이 사용 되고 있으며, 특히 처리과정이 신속하고 상당히 정확하게 표현할 수 있는 장점이 있다.2.2 데이터 취득 및 처리
본 연구에서 사면붕괴 시 토사량을 산정하는 과정은 Fig.
3에 나타낸 바와 같다. 먼저, 토사량 산정을 위해 UAV 촬 영이 가능한 지역을 선정한다. 대상지역 선정 후, 취득 영상 의 영상접합(모자이크)에 따른 영상왜곡 오차를 최소화하기 위한 측량 대상지역에 Sokkia사의 GRX2로 GCP(Ground Control Point) 측량을 실시하고, eBee UAV를 이용한 항공 영상을 취득한다. 취득한 항공영상의 자료 처리는 전처리와 후처리로 분리된다.
전처리는 UAV에 있는 비행 로그를 취득한 항공영상을 eMotion 2에 있는 Process Flight Data 기능으로 정리하고, 후처리는 eMotion 2에서 취득한 파일을 Pix4Dmapper를 이용하여 항공 영상의 자료 처리를 통한 정사영상 및 DSM(Digital Surface Model)을 생성한다. 이후 Pix4Dmapper와 Virtual Surveyor 로 3D 지형도를 통해 대상 현장의 체적을 산정한다.
3. 데이터 분석
3.1 대상지역 선정
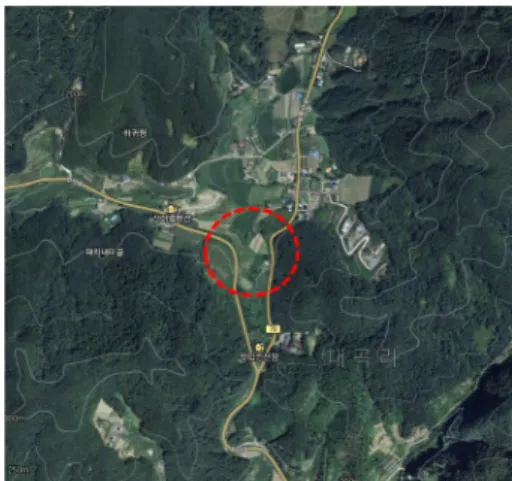
본 연구에서는 산사태 피해 조사 등에 무인항공기의 적 용성을 검토하기 위해 사면 붕괴 현장 실험이 용이한 현장 을 조사하였고, 사면 붕괴 전・후의 체적 산정이 가능하며 UAV 촬영이 용이한 강원도 홍천군 서면 대곡리 335-7일원 에 위치한 현장을 선정하였다(Fig. 4).
Fig. 4. Survey site location (daum maps, 2018)
3.2 대상지역 영상자료 추출
사면 붕괴 시 토사량 산정에 대한 UAV 촬영을 위해 사 면붕괴 실험현장이 포함되게 eMotion2에 비행 계획을 설정 하고 비행 전 경로 설정, 촬영 중첩도, 비행 시작점, 비행 착륙점, 촬영 범위 등을 eMotion 프로그램에 입력하였다.
촬영 중첩도가 높일수록 측량 오차가 최소화되기 때문에 촬영 중첩도는 종방향과 횡방향 각 80%로 설정하였다. 비 행 고도는 주변에 있는 산과 같은 장애물에 추락하지 않도 록 120.1m/ATO 높이로 비행하도록 하고, 지반 해상도는 3.4cm/px로 설정하였다.
본 현장에서의 촬영 시간은 1회당 평균 약 5분 6초였으 며 UAV 촬영 면적은 약 0.023km2로 소규모 현장이기 때문 에 1회 비행으로 대상 현장 촬영을 하였다.
eMotion2 프로그램에서 비행경로 설정은 Fig. 5에서 보 는 바와 같고, 세부적인 비행 정보는 Fig. 6과 같다.
Fig. 7은 GCP(Ground Control Points) 좌표측량을 위해 현 장에서 설정한 기준점을 나타내며 Fig. 8은 GPS 측량을 실 시한 전경을 나타낸다. Fig. 9는 항공영상 촬영을 위해 UAV 를 이륙시키는 장면을 보여준다.
GCP 측량 결과는 Table 1에 나타낸 바와 같다.
Fig. 5. Setting survey mission area in eMotion2 S/W
Fig. 6. UAV drone survey mission details
Fig. 7. GCP points selected in survey site
Fig. 8. GPS survey of GCP points
Table 1. Ground control point survey result from GPS Coordinate system Korea 2000/Central belt 2010
Division X Y Z
GCP1 257346.311 560771.487 191.044
GCP2 257309.765 560783.333 188.785
GCP3 257257.509 560795.968 186.502
GCP4 257331.776 560740.228 189.714
GCP5 257297.812 560748.814 191.423
GCP6 257305.733 560705.226 196.300
Fig. 9. eBee UAV drone take-off
3.3 Pix4Dmapper, Virtual Surveyor 분석 방법
Pix4Dmapper와 eMotion2는 Sensefly사에서 개발한 프로 그램이다. Pix4Dmapper 프로그램의 입력 파일은 eMotion2 의 전처리에서 취득한 파일이고, Pix4Dmapper는 포인트 클 라우드와 메쉬를 작성하여 UAV 측량 데이터를 분석한다.
UAV 측량 이미지를 분석하기 전에 크기, 밀도 및 메쉬 수 를 제어할 수 있다.
3D 텍스처 메쉬는 분석에 적합한 값으로 설정할 수도 있 다. DSM, Orthomosaic 및 Index 속성도 분석 전에 적절한 값으로 제어할 수 있다. Pix4D로 처리 후에 완벽한 3D 지형 모델을 취득하려면 삼각형 메쉬 수행이 필요하다.
타이 포인트는 볼륨 메뉴에서 설정해야 하며 타이 포인 트가 많을수록 체적 계산의 정확도가 높아진다. 타이 포인 트를 선택한 후 모든 타이 포인트의 위치는 Fig. 10과 같이 개별 이미지에서 제어할 수 있다. 이 과정은 GCP 포인트에 대해 수행된 Fig. 16과 동일하다. 이것은 사면의 체적을 계 산할 때 오류 발생을 최소화한다.
Virtual Surveyor의 경우 먼저 빠른 표면 메뉴에서 표면을 선택한다. 체적이 계산될 것으로 예상되는 물체 주위의 표 면, 사면 주위의 여러 가지 포인트를 Fig. 11과 같이 설정한 다. 그러나 3D 지형도면에서 선택된 포인트의 보정에 대한 조항이 없기 때문에 Virtual Surveyor보다 Pix4Dmapper가 좀 더 정확한 체적을 계산할 수 있다. 따라서 Pix4Dmapper
Fig. 10. Volume analysis by Pix4Dmapper
Fig. 11. Volume analysis by virtual surveyor
Fig. 12. Flight data manager in eMotion software
Fig. 13. UAV photos and flight log file selection in eMotion software
Fig. 14. Output coordinate system selection
Fig. 15. Processing options input
Fig. 16. Applying correct coordinates from GPS survey to GCP1 point in Pix4D
에서 취득한 체적을 오차율 계산 시 표준값으로 사용하였다.
3.4 비행 데이터 전처리 및 후처리
비행 데이터의 전처리는 Fig. 12와 같이 eMotion2 프로 그램의 Flight Data Manager 기능에서 수행되었으며, eBee UAV 무인항공 측량영상과 무인항공 로그 파일을 Fig. 13 과 같이 eMotion2에 삽입하여 전처리 과정을 진행하였다.
eMotion2로 전처리 후 취득한 .p4d 확장자의 출력 파일을 Pix4Dmapper 프로그램으로 활성화하였다.
Pix4Dmapper에서 첫째, 출력 좌표계는 Fig. 14와 같이
‘Geocentric datum of Korea’와 ‘Korea 2000 / Central Belt 2010’로 선택하였다. Fig. 15는 처리 옵션에 Initial Processing, Point Cloud and Mesh and DSM, Orthomosaic and Index 등 3개의 기능을 보여준다.
처리 옵션 메뉴에서는 분석 목적에 적합한 옵션을 선택하 고 Initial Processing(초기 처리)을 실행하였다. Initial Processing
Fig. 17. Orthographic image of site before failure
Fig. 18. Orthographic image of site after slope failure
Fig. 19. DSM of site before slope failure
Fig. 20. DSM of site after slope failure
Table 2. Slope volume change calculation before and after failure and comparison of result from two softwares
Classification
Volume calculation (Unit : m
3) Before slope
failure
After slope failure
Change in volume
Pix4Dmapper 1,291.41 1,285.72 5.69
Virtual Surveyor 1,271.92 1,266.03 5.89
Fig. 21. Soil volume calculation before slope failure by Pix4Dmapper software
Fig. 22. Soil volume calculation before slope failure by virtual surveyor software
Fig. 23. Soil volume calculation after slope failure by Pix4Dmapper software
Fig. 24. Soil volume calculation after slope failure by virtual surveyor software
이 완료된 후 GPS 좌표 값은 Fig. 14와 같이 GCP/MTP 매 니저 옵션을 선택하고 6개의 Ground Control Points(GCP) 에 측량된 값을 입력하였다. 이는 UAV 촬영으로 취득한 측 량좌표에서 발생할 수 있는 공간적인 오차를 최소화하기 위 함이다.
다음으로 Point Cloud and Mesh와 DSM, Orthomosaic and Index 옵션으로 최종 처리를 완료하였다. 최종 처리는 컴퓨 터의 성능에 따라 약 1~2시간이 소요된다. 데이터 처리가 완료됨에 따라 Fig. 17~Fig. 20과 같이 정사영상, 3D 지형 모델 및 DSM(Digital Surface Model)이 생성되었다. 다음으 로 Pix4Dmapper에서 최종 처리까지 실행된 DSM 정사영상 출력 파일을 Virtual Surveyor에서 3D 지형모델을 구축하였 다. 사면붕괴 전과 후에 촬영한 UAV 데이터를 가지고 동일 한 과정으로 최종 처리까지 하였다. 따라서 Pix4Dmapper와 Virtual Surveyor로 취득한 3D지형모델 사면붕괴 전과 후에 각각 2개의 결과를 취득하였다. 취득한 데이터로 길이, 높 이, 면적, 경사, 체적 등을 계산할 수 있다.
본 연구에서는 UAV를 활용한 사면 붕괴 전・후의 체적을 산정하여 분석 기법 비교에 따른 현장적용 가능성을 검토하 였으며, 그 결과는 Table 2와 같다.
Table 3. Specifications of 3D scanner
Particulars Details
Scanning range
0.6~330 m, Speed:976,000 pts/sec,
H:360°/V:330°
Scan resolution Spot size: 2.25 mm
Digital camera 70 megapixels
Interface SD & SDHC Memory card, WLAN Dimension 240 x 200 x 100 (mm), 5.2 Kg
Fig. 25. 3D scanning
Fig. 26. Using 3D scanner before slope failure
Fig. 27. Using 3D scanner after slope failure
Pix4Dmapper와 Virtual Surveyor 프로그램에서 취득한 결과를 비교하면 붕괴 전 체적값 차이는 19.49m3이고 붕괴 후는 19.69m3이다. Pix4Dmapper로 취득한 결과를 이용하여 Virtual Surveyor로 3D지형모델을 생성하기 때문에 Pix4Dmapper 로 취득한 결과를 기준으로 오차율은 붕괴 전이 약 1.51%
이고 붕괴 후는 약 1.53%이다.
붕괴 전과 후의 체적변화는 Pix4Dmapper를 이용할 때 5.69m3이며 Virtual Surveyor는 5.89m3로 분석되었다. 이 두 개의 프로그램으로 취득한 결과를 비교하면 체적값 차이의 오차율은 3.40%로 분석되었다.
3.5 3D 스캔 측량
3D 스캐너란 스캐너에서 방출되는 레이저 포인트가 대 상체에 반사되어 돌아오는 값을 취득하여 대상체의 표면에 대한 X, Y, Z의 3차원 좌표를 표현하는 측량 장비이다. 3D 스캐너는 초당 수십만 회의 레이저를 대상물체에 발사하여 취득한 점들의 자료들로 대상물체의 표면에 대한 공간적 위 치정보를 포함한 3차원 형상까지 표현해 낼 수 있다. 그러 므로 접근이 어려운 현장이나 면적이 넓어 시간과 인원 투 입이 많은 현장 등에 유리하며, 측량을 수행함에 있어 매우 높은 정확도를 보장하는 고정밀 측량 기법이다.
3D 스캐너는 측량용 무타겟 토탈스테이션과 동일한 원 리로 작동된다. 레이저를 송신하고 물체에 반사되어 돌아 오는 레이저를 수신하여 거리를 측정하고, 거리 측정과 동시에 레이저 빔의 수평, 수직각을 정밀히 측정하여 이 를 3차원 좌표 성분의 점군(Point Cloud)으로 환산하는 것 이다.
3D 스캔 측량 결과, 체적 변화량은 5.18m3이며, Pix4Dmapper 와 Virtual Surveyor 프로그램에서 취득한 결과와 비교하면 Pix4Dmapper 경우 +0.41m3, Virtual Surveyor 경우는 +0.61m3 로 나타났다. 체적값 차이의 오차율은 각각 7.92%와 11.78%
로 분석되었다. 이상 결과에서 Virtual Surveyor 프로그램보 다 Pix4Dmapper를 활용하는 것이 현실적으로 적용이 가능 하다고 판단할 수 있다.
3D 스캐너를 활용한 사면 붕괴 전후의 측량 내용은 Fig.
26~Fig. 27과 같다.
4. 결 론
본 연구는 무인항공시스템의 영상정보를 활용하여 3D지 형모델을 통해 두 개의 공간정보 소프트웨어를 이용하여 사 면 붕괴 전과 후 체적 변화를 산출하였으며 본 연구를 통해 얻은 결론은 다음과 같다.
(1) Pix4Dmapper와 Virtual Surveyor 프로그램에서 취득한 사면 붕괴 전후의 토사량 산정 값을 비교・검토한 결과 사면 붕괴 전의 오차율은 1.51%, 붕괴 후는 1.53%이고 토사량 변화값에 오차율은 3.40%였다.
(2) 사면붕괴 현장 실험을 통하여 3D지형모델링으로 계산 한 사면붕괴 전과 후 토사량 차이의 오차가 작으므로 산사태와 같은 자연 재해 발생 시 무인항공시스템을 활 용하여 3D지형모델을 생성하여 계산하면 토사량의 변 화를 효율적으로 검토할 수 있을 것으로 판단된다. (3) 3D 스캔 측량 결과를 기준으로 토사량의 오차율은
Pix4Dmapper 7.92%, Virtual Surveyor 11.78%로 분석 되어 Pix4Dmapper가 Virtual Surveyor보다는 토사량 산 정에 적용성이 높다고 판단된다.
(4) 무인항공시스템의 영상정보를 이용하는 기법은 신속 정 확하다는 장점을 가지고 있어 재난지역에 대한 대책 수 립에 기여할 수 있을 것으로 판단된다.
감사의 글
본 연구는 국토교통부 국토교통기술사업화지원사업의 연구비지원(과제번호 18TBIP-C144286-01)에 의해 수행되 었습니다.
References