Copyright
Ⓒ2016 KSAE / 144-01 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2016.24.5.495 Transactions of KSAE, Vol. 24, No. 5, pp.495-503 (2016)
자율주행 자동차 임시운행 허가를 위한 안전 성능 평가 시나리오
채 흥 석1)․정 용 환1)․이 경 수*1)․최 인 성2)․민 경 찬2)
서울대학교 기계항공공학부1)․교통안전공단 자동차안전연구원 자율주행연구팀2)
Safety Performance Evaluation Scenarios for Extraordinary Service Permission of Autonomous Vehicle
Heungseok Chae1)․Yonghwan Jeong1)․Kyongsu Yi*1)․Inseong Choi2)․Kyongchan Min2)
1)
Department of Mechanical & Aerospace Engineering, Seoul National University, Seoul 08826, Korea
2)
Autonomous Vehicle R&D Team, Korea Automobile Testing & Research Institute, Korea Transportation Safety Authority, 200 Samjon-ro, Songsan-myun, Hwaseong-si, Gyeonggi 18247, Korea
(Received 10 June 2015 / Revised 13 November 2015 / Accepted 11 July 2016)
Abstract : Regulation for the testing and operation of autonomous vehicles on public roadways has been recently developed all over the world. For example, the licensing standards and the evaluation technology for autonomous vehicles have been proposed in California, Nevada and EU. But specific safety evaluation scenarios for autonomous vehicles have not been proposed yet. This paper presents safety evaluation scenarios for extraordinary service permission of autonomous vehicles on highways. A total of five scenarios are selected in consideration of safety priority and real traffic situation. These scenarios are developed based on existing ADAS evaluation and simulation of autonomous vehicle algorithm. Also, Safety evaluation factors are developed based on ISO requirements, other papers and the current traffic regulations. These scenarios are investigated via computer simulation.
Key words : Autonomous vehicle(자율주행 자동차), Evaluation scenarios(평가 시나리오), Extraordinary service permission(임시운행 허가), Safety evaluation factors(안전성 평가항목)
1. 서 론
1)
세계 곳곳에서 자율주행 자동차의 시범 주행 및 법규를 개발하고 있다. 최근에 구글, 폭스바겐, 아우 디, BMW, 다임러-벤츠 등이 일반 도로 상에서의 자 율주행 자동차 시험 주행을 실시하고 있으며, 캘리 포니아 주나 네바다 주와 같은 일부 지역에서는 자 율주행 자동차 시험 운행 면허를 공식적으로 발급 하고 있다. EU에서는 2014년부터 Adaptive라는 자 율주행 평가 기술 프로젝트 개발을 시작하였다. 그 러나 현행 자율주행 자동차 시험 운행 면허 발급 기
*
Corresponding author, E-mail: [email protected]
준은 실 도로 상에서 주행하게 될 자율주행 자동차 안전성 검증에 대한 부분은 미비하다. 따라서 자율 주행 자동차가 실 도로를 주행함에 있어서 발생할 수 있는 여러 상황에 대한 안전성 확보 여부를 확인 할 수 있는 평가 방안이 요구되는 상황이다.1-3)
본 논문은 자율주행 자동차의 임시운행 허가를 위한 안전성 평가 시나리오와 평가 항목을 제시하 려고 한다. 자율주행 자동차가 자동차 전용 도로에 서 안전하게 운행하기 위한 최소한의 요건을 확인 하는 시나리오를 제안한다. 또 각 시나리오에서 평 가해야할 요구 사항을 구체적으로 제시하여 현실적 인 안전 성능 평가방안을 구성하였다.
채흥석․정용환․이경수․최인성․민경찬
2. 자율주행 자동차 임시운행 및 평가 기술 현황 및 개별 요소 기술 규정
2.1 자율주행 자동차 임시운행 및 평가 기술 현황 2.1.1 캘리포니아 주
2012년 9월에 개정된 캘리포니아 주의 자율주행 자동차 임시운행 허가 기준은 운전자와 운행 중 발 생하는 사고 대응에 관한 내용으로 이루어져 있다.
먼저 운전자는 자율주행 자동차의 한계를 명확히 인식하고 차량 제어 권한을 전달 받을 수 있어야 한 다. 이를 위해 주에서 마련한 훈련 프로그램을 받아 야 한다. 운행 중 발생한 사고는 캘리포니아 주 차량 관리부에 보고되어야 하고 사고자는 사고로 인해 발생한 인적, 물적 손실에 대해 보상해야 한다. 결론 적으로 캘리포니아 주에서 임시운행 허가 요건은 개발했지만 자율주행 차량의 안전성 평가 방안이 구체적으로 제시되지 않았다는 점은 개선이 필요하다.4)
2.1.2 네바다 주
네바다 주의 자율주행 임시 허가 기준의 경우, 운 전자 및 운행 중 발생한 사고에 대한 부분은 캘리포 니아 주와 유사하다. 이에 더하여 네바다 주는 1만 마일 자율주행 시험운행 결과, 시스템에 대한 설명 보고서, 시험 시 안전성 확보에 대한 계획, 그리고 자율주행 자동차 시연을 개발자에게 요구한다. 또 한 임시운행 허가 발급 면허는 6개로 분류된 도로조 건과 5개로 분류된 환경조건에 대해 개별적으로 발 급된다. 네바다 주는 캘리포니아 주의 허가 기준을 좀 더 보안하였으나 여전히 안전성 평가 시나리오 를 구체적으로 제시하지 않았다. 따라서 안전성 평 가 시나리오의 개발이 필요하다.5)
2.1.3 EU 자율주행 평가 기술 개발 프로젝트 EU에서는 2014년부터 Adaptive라는 자율주행 평 가 기술 프로젝트 개발을 시작하였다. Adaptive에서 는 법적 요소, human factors에 대한 반영을 고려하 고 있다. 또한, 평가 시나리오에 대해 주차장 같은 근접 거리 상황 시나리오, 도심 시나리오, 자동차 전 용도로 시나리오로 분류를 하고 있다. 하지만, 이에 대한 구체적 내용은 아직 개발되지 않았다. 예를 들 어, 자동차 전용도로 시나리오의 경우, 속도 기준 130 km/h 고려, 제한 속도 표지판 고려, 합류 차량에
대응해서 속도를 적응해야 된다는 정도의 간단한 언급만 한다. 또한 fault, take over, V2V에 대한 평가 의 필요성만 언급하고 있다. 따라서 구체적 안전성 평가 시나리오의 개발이 필요하다.6)
2.2 개별 요소 기술 국제 규정
본 논문의 대상인 자동차 전용도로에서의 자율주 행 자동차는 개별 ADAS 요소 기술인 ACC, AEB, 그 리고 LKAS의 통합 시스템이다. ADAS의 통합 시스 템인 자율주행 자동차 시스템의 성능 평가를 위해 요소 시스템의 성능 평가 규정을 조사했다.
2.2.1 적응형 순항 제어 장치(ACC)
ISO에서 규정하고 있는 ACC 성능 평가는 직선로 인지 거리 성능, 선행 차량 식별 성능, 그리고 곡선 로 선행 차량 식별 성능으로 구성되어 있다. 직선로 인지 거리 성능 평가는 2초 이내에 인지 가능한 최 대 거리를 평가한다. 선행 차량 식별 성능 평가는 직 선로에서 자차선과 옆차선에 존재하는 각각의 선행 차량의 인지여부를 평가한다. 이는 복수의 선행차 량이 존재하는 경우, 다른 차선의 차량을 오인식 하 지 않고 정상 추종하는지 검증하는 테스트이다. 곡 선로 선행 차량 식별 성능 평가는 곡선로에서 전방 선행차량에 대한 정상적 인지 여부를 평가한다. 또 한 곡선로에서 선행 차량이 감속했을 때 자차량의 거동도 평가대상이다.7)
Fig. 1 Straight road perception length test of ISO ACC
2.2.2 자동 긴급 제동 시스템(AEBS)
Euro NCAP에서 규정하고 있는 AEBS 성능 평가 는 City와 Inter-Urban 두 가지 경우로 나누어진다.
City 시나리오의 경우, 자차량 속도 10 km/h ~ 50 km/h 영역에 대해 정지 타겟에 대한 AEBS 성능 평가를 다
자율주행 자동차 임시운행 허가를 위한 안전 성능 평가 시나리오
루고 있다. Inter-Urban 시나리오의 경우, 자차량 속 도 30 km/h ~ 80 km/h 영역에 대해 정지 타겟, 이동 타 겟, 감속 타겟에 대한 AEBS 성능 평가를 다루고 있 다.8) ISO에서 규정하고 있는 AEBS 성능 평가는 2가 지 테스트 시나리오가 있다. 하나는 정지 전방차량 에 대한 고속 접근으로 선행차량의 속도가 0 km/h이 고 자차량 초기 속도가 80 km/h, 선행차량과의 초기 차간거리가 120 m인 경우이다. 두 번째는 정지 저속 차량에 대한 고속 접근으로 선행차량 속도는 30 km/h, 자차량 초기속도는 80 km/h, 선행차량과의 초 기 차간거리는 120 m인 경우이다. 테스트 시나리오 에서 평가하는 기준안은 다음과 같다. 자동긴급제동 1.4초 이전에 1개 이상의 경고를 제공, 0.8초 이전에 2 개 이상의 경고를 제공, 충돌시점에서 10 km/h 이상 의 속도감소, TTC 3초 이전에 긴급제동이 발생하지 않을 것. 이 조건들의 만족여부를 평가한다.
2.2.3 차선 유지 보조 시스템(LKAS)
ISO에서 규정한 LKAS 성능 평가는 반경 800 m의 곡선 구간에서 72 km/h ~ 108 km/h의 속도 범위 내에 서 가속도, LKAS 작동 범위 등을 평가한다.9) NHTSA 에서 규정한 시나리오의 경우 72 km/h에서 진행하 는 차량에 대해 0.6 m/s 이상의 횡방향 속도에서부 터 차선 이탈 방지 성능이 유지되는 최대 속도까지 성능 테스트를 실시한다.
Fig. 2 AEB test scenario of Euro NCAP
3. 자율주행 자동차 운행 기준 및 안전 성능 평가 시나리오
3.1 자율주행 자동차 운행 기준
자율주행 자동차의 안전 성능을 평가하기 위한 시나리오를 제안하기에 앞서 자율주행 자동차 운행
을 위한 최소한의 기준이 제시되어야 한다. 앞의 북 미의 임시운행 허가 기준을 참고해서 본 논문은 자 율주행 자동차, 운전자, 그리고 사고 책임의 3가지 기준을 제시하였다.10)
먼저 자율주행 자동차는 고장이 발생했을 때 대 비가 가장 중요하다. 따라서 차량 상태 모니터링 및 고장 알림 기능, 비상정지 스위치, 운전자 오버라이 드 기능, 주요 sensor/actuator 고장에 대한 진단, 기록 및 알림 기능, 사고 데이터 저장 장치, 그리고 주변 차량에 대한 자율주행 상태 알림 장치를 확보해야 할 것으로 생각된다.
운전자는 자율주행 자동차 시스템의 성능적 한계 를 충분히 인지하고 필요 시 차량 제어 권한을 전달 받을 수 있어야한다. 이를 위해 캘리포니아 주와 같 이 운전자 훈련 프로그램이 필요하다고 생각된다.
사고가 발생 시 책임은 임시 운행 주관 및 자율주행 자동차 개발 기관이 지어야 한다.
3.2 자율주행 자동차 안전 성능 평가 시나리오 자율주행 자동차 안전 성능 평가 시나리오는 Table 1과 같다. 자율주행자동차 임시허가 테스트를 받는 차량을 고려해봤을 때, 기본적인 개별 운전자 지원 제어 시스템(ADAS)의 성능은 충족한다고 판 단하였다. 현재 양산화 단계의 시스템인 ACC, AEB, LKAS 시스템 단독으로 구현이 가능한 시나리오를 제외하고 자율주행의 기본이 되는 종횡방향 통합 제어를 평가하는 시나리오로 구성했다. 자율주행 자동차의 임시허가 시나리오로써 자동차 전용도로 에서 최소한의 주행인 차선 유지 여부를 평가하는 시나리오로 구성되어 있다. 각 시나리오는 기존의 ADAS 평가 시나리오와 많은 양의 자율주행 시뮬레 이션을 통해서 결정하였다.
Table 1 Evaluation scenarios of autonomous vehicle 시나리오 No.1
일반 주행 모드
시나리오 No.2 정지-서행
주행모드
시나리오 No.3 Cut-in/out 주행모드 시나리오 No.1-1
자차선 단독주행
시나리오 No.2-1 선행차량 정체주행
시나리오 No.3-1 Cut-in 차량
대응주행 시나리오 No.1-2
자차선/옆차선 선행차량 대응주행
시나리오 No.3-2 Cut-out 차량
대응주행
Heungseok Chae․Yonghwan Jeong․Kyongsu Yi․Inseong Choi․Kyongchan Min
3.2.1 자차선 단독주행
자차선 단독주행은 종방향 제어와 횡방향 제어가 통합적으로 이뤄지는지 평가하는 시나리오이다.
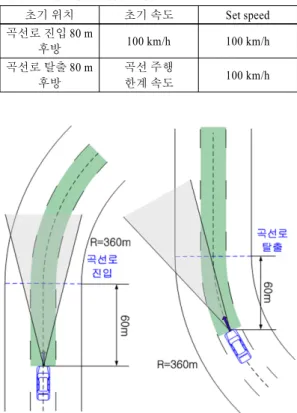
Fig. 3과 같이 직선-곡선 변화도로에서 곡선로 진입, 탈출 시에 차량이 차선을 잘 유지하는지 평가한다.
곡선로 진입과 탈출 시 초기 위치는 상용화 단계 센 서의 성능을 고려해서 각각 80 m 후방으로 정하였 다. 곡선부의 곡률은 대한민국 고속도로에서 급격 한 상황인 360 m로 정하였다. 곡선부 진입 시 초기 속도는 통상적인 고속도로 속도인 100 km/h이다. 곡 선부에 진입 시, 자동으로 차선유지를 위해 속도를 감속하는지 여부를 통해 종횡방향 통합제어를 평가 한다. 곡선부 탈출 시, 차선을 유지 여부와 곡선에서 의 한계속도에서 직선부에 도달했을 때, 다시 Set speed로 회복여부를 판단한다.
Table 2 Test No. 1-1 scenario
초기 위치 초기 속도 Set speed
곡선로 진입 80 m
후방 100 km/h 100 km/h
곡선로 탈출 80 m 후방
곡선 주행
한계 속도 100 km/h
Fig. 3 Test scenario No. 1-1
3.2.2 자차선/옆차선 선행차량 대응주행
자차선/옆차선 선행차량 대응주행은 앞의 자차 선 단독주행에 옆차선, 앞차선 선행차량이 추가된
Table 3 Test scenario No. 1-2
초기 위치 자차량 속도 선행 차량 속도
곡선로 진입 80 m 후방
Set speed >
80 km/h 80 km/h 곡선로 탈출
80 m 후방
곡선 주행
한계 속도 80 km/h
Fig. 4 Test scenario No. 1-2
시나리오이다. Fig. 4와 같이 직선-곡선 변화도로에 서 두 선행차량들 중 자차선 선행차량을 구분하고 차선을 유지하면서 자차선 선행차량을 추종하는지 를 평가한다.11) 기본적인 상황은 1-1 시나리오와 같 다. 선행차량의 속도는 자동차 전용도로에서 중저 속인 80 km/h로 정하였다. 자차량의 Set speed를 80 km/h보다 큰 값을 정하여서 자차선 선행차량을 따 라 잡은 후 추종여부를 평가한다.
3.2.3 선행차량 정체주행
선행차량 정체주행은 혼잡구간 주행지원 시스템 (TJA) 기능을 평가하는 시나리오이다. Fig. 5와 같이 정지, 출발을 반복하는 앞 차량을 추종하면서 자동 차 전용도로에서 빈번하게 발생하는 정체상황을 대 응하는지 평가한다. 자차량과 선행차량의 횡방향 초기위치는 횡방향 위치 ±50 cm이내, 헤딩 각도 오 차 ±1.5 deg 이내로 설정한다. 자차량의 초기 속도는 50 km/h로 200 m 전방에 서행하는 선행차량을 발견 한 후 감속 여부를 판단한다. 그 후 선행차량을 추종
Safety Performance Evaluation Scenarios for Extraordinary Service Permission of Autonomous Vehicle
Table 4 Test scenario No. 2-1 자차량
초기 속도 선행 차량 속도 초기 차간
거리
50 km/h
초기 속도: 12 km/h 추종 상태 도달 이후 0 km/h ~ 20 km/h 정체 상황
200 m
Fig. 5 Test scenario No. 2-1
하면서 정체상황에 대응한다. 선행 차량의 가속도 는 -1.5 m/s2 ~ 2.5 m/s2의 범위를 사용한다. 선행차량 의 속도는 0 km/h ~ 20 km/h 사이 속도로 정체 상황 을 연출한다.12)
3.2.4 Cut-in 차량 대응주행
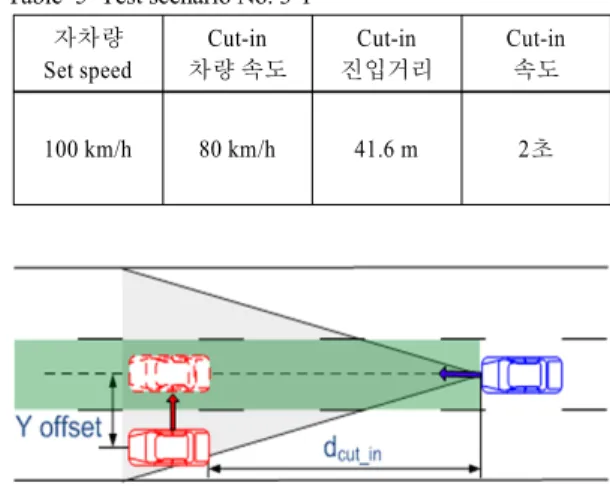
Cut-in 차량 대응주행은 자동차 전용도로에서 빈 번하게 발생되는 Cut-in 차량에 대응하는 시나리오 이다. Fig. 6과 같이 옆차선에서 자차선으로 앞 차량 이 Cut-in할 때 이를 인지하고 속도를 감속해서 차간 거리 유지 여부와 차선 유지 여부를 평가한다. 자차 량의 속도는 통상적인 고속도로 직선 구간 속도인 100 km/h이다. 시나리오의 위험성을 더하기 위해서 Cut-in 차량 속도는 자차량 보다 낮은 80 km/h이다.
Cut-in 진입거리는 ACC ISO에 있는 아래의 차간 거 리 식 (1)을 이용했다.
×
min
(1) where
: 권장 차간 거리(m)
: 일반적 반응 속도(sec)
: Set 속도(m/s)
min : 최소 차간 거리(m)위의 식에 일반적 반응 속도는 1.8초, 자차량 속도 100 km/h, 최소 차간 거리 2 m를 넣고 계산한 권장 차간 거리는 52 m이다. 시나리오의 위험성을 더하 기 위해 시뮬레이션 반복 결과, 권장 차간 거리의 80 % 가 위험성과 실험 가능성을 확보하는 거리로 판단
Table 5 Test scenario No. 3-1 자차량
Set speed
Cut-in 차량 속도
Cut-in 진입거리
Cut-in 속도
100 km/h 80 km/h 41.6 m 2초
Fig. 6 Test No. 3-1 scenario
하였다. 따라서 옆차선 차량의 Cut-in 진입거리는 권 장 차간 거리의 80 %인 41.6 m로 정하였다. Cut-in 속 도(선행 차량 차선 변경)는 위험성을 더하기 위해 빠른 Cut-in 속도인 2초로 정하였다.
3.2.5 Cut-out 차량 대응주행
Cut-out 차량 대응주행은 자동차 전용도로에서 빈번하게 발생되는 Cut-out 차량에 대응하는 시나리 오이다. 자차량의 속도는 통상적인 고속도로 직선 구간 속도인 100 km/h이다. 선행차량 속도는 중저속 인 80 km/h이다. Fig. 7과 같이 자차량이 선행차량을 ACC로 추종하다가 선행차량이 Cut-out하는 경우, 이를 인지하고 속도를 Set speed로 상승하는지 여부 와 차선 유지 여부를 평가한다. Cut-out 시작 차간 거 리는 후방의 자율주행 차량 ACC 알고리즘의 추종 차간 거리에 따라 결정된다.
Table 6 Test scenario No. 3-2
자차량 속도 선행차량 속도 Cut-out 시작 차간 거리
100 km/h 80 km/h 자율주행 알고리즘
ACC 차간 거리
Fig. 7 Test scenario No. 3-2
채흥석․정용환․이경수․최인성․민경찬
4. 자율주행 자동차 안전성 평가항목 앞서 제안한 시나리오를 기반으로 자율주행 자동 차의 임시허가를 위해서는 허가의 조건으로 시나리 오별 안전성 평가항목 개발이 필요하다. 임시운행 허가 여부를 정하기 위한 평가항목이므로 점수가 아닌 통과 여부를 정하는 임계값을 정하였다. 평가 항목은 운전자 지원 제어 시스템(ADAS) 개별 ISO 기술 규정, 논문, 국내 자동차 전용도로 규정을 근거 하여 제안하였다.
4.1 횡방향 거리
횡방향 거리는 자차량의 차선 유지를 평가하기 위해 필요한 항목이다. 위에서 제안한 5가지 모든 시나리오에서 평가해야하는 항목이다. 차량의 Yaw 각이 크지 않다고 가정하면 단순히 횡방향 거리를 이용해서 차선유지 여부를 판단할 수 있다. 횡방향 거리, 차량의 폭, 차선의 너비를 통해 아래 식 (2)와 같이 차선 유지 여부를 평가할 수 있다.
≤
(2) where
: 횡방향 거리(m)
: 차선의 폭(m)
: 차량의 폭(m)4.2 종방향 속도
종방향 속도는 시나리오 No.1-1, No.1-2, No.3-1, No.3-2에서 평가해야할 항목이다. 시나리오 No.1-1, No.1-2에서 곡선 진입 시 자차량의 속도가 감소됨이 예상된다. 이때, 안정적인 곡선 주행을 위해 종방향 속도를 과도하게 낮추면 후방차량과 충돌 위험이 있다. 따라서 종방향 속도의 최솟값을 50 km/h로 정 하였다. 이는 일반적인 고속도로 주행속도 기준인 최대 110 km/h, 최소 50 km/h를 기준으로 했다. 시나 리오 No.3-1의 경우, Cut-in 차량에 대응해서 자차량 이 감속해야 한다. 이때, 충돌을 피하기 위해 속도를 과도하게 낮추면 후방차량과 충돌 위험이 있다. 따 라서 종방향 속도의 최솟값을 50 km/h로 정하였다.
시나리오 No.3-2의 경우, 선행차량이 Cut-out후, 자 차량이 Set speed로 속도를 회복하는지 여부를 평가 항목으로 정하였다.
4.3 종방향 가속도
종방향 가속도는 차량의 ACC 성능 평가를 위해 필요한 항목이다.13) 위에서 제안한 5가지 모든 시나 리오에서 평가해야하는 항목이다. 종방향 가속도의 경우 ISO의 ACC 성능 평가 규정을 따랐다. ISO에 따르면 ACC의 평균 감속도는 20 m/s 이상의 속도에 서는 3.5 m/s2 (2초간 평균)을 초과하지 않을 것, 평균 가속도는 20 m/s 이상의 속도에서는 2.0 m/s2을 초 과하지 않을 것이라는 기준이 있다. 자율주행 자동 차의 종방향 주행은 ACC가 기반이기 때문에 ISO ACC 규정을 따라서 평가항목을 정하였다.
4.4 횡방향 가속도
횡방향 가속도는 차량의 차선유지를 평가하기 위 해 필요한 항목이다. 차량의 LKAS 성능과 관련 있 는 횡방향 가속도는 곡선 주행이 포함된 시나리오 No.1-1, No.1-2에서 평가해야하는 항목이다. 횡방향 가속도의 경우 ISO의 LKAS 기준을 따랐다. ISO에 따르면 LKAS에서 횡방향 가속도가 3 m/s2을 초과하 지 않아야 한다는 기준이 있다. 자율주행 자동차의 횡방향 주행은 LKAS를 기반이기 때문에 ISO LKAS 규정을 따라서 평가항목을 정하였다.
4.5 차간 거리
차간 거리는 앞 차량과의 충돌 위험을 평가하기 위해 필요한 항목이다.14) 위에서 제안한 시나리오 No.2-1의 경우 정체상황에서 앞 차량과의 일정 차간 거리를 계속 유지해야 한다. 정체 주행상황 ACC에 관해 연구한 논문을 보면 정체상황에서 최소로 유 지해야하는 권장 거리는 1 m ~ 3 m이다.15) 따라서 정체 상황일 때 선행 차량과의 거리가 최소 1 m 이상 인지 여부를 차간 거리 평가항목으로 정하였다.
위에서 제안한 시나리오 No.3-1의 경우 옆 차선 차량이 Cut-in했을 때, 안정적으로 차간거리를 유지 하는지 평가가 필요하다. ISO ACC기준에 따르면 차량의 최소 안전 거리를 2 m로 정하였다. 이를 따 라서 주행 시 차간거리의 최솟값을 2 m로 정하였다.
5. 시뮬레이션 결과
제안된 시나리오의 타당성을 확인하기 위해
자율주행 자동차 임시운행 허가를 위한 안전 성능 평가 시나리오
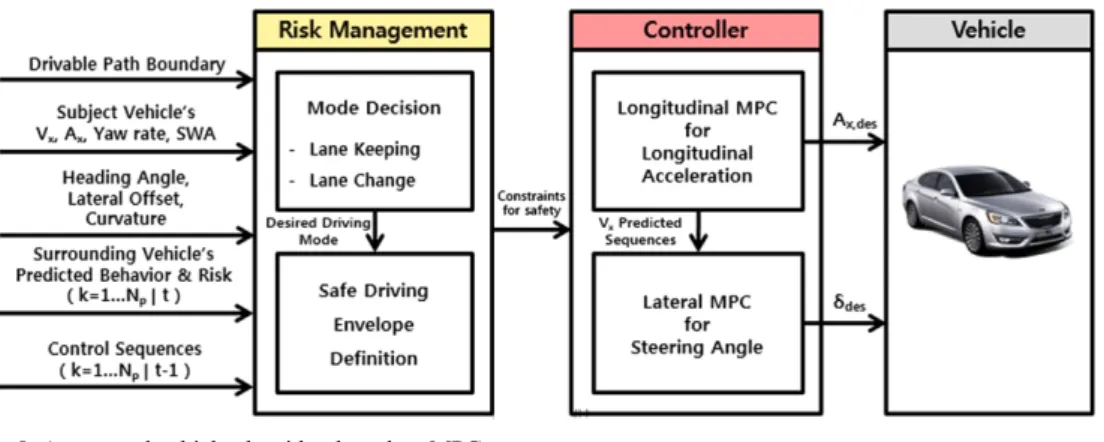
Fig. 8 Automated vehicle algorithm based on MPC MATLAB/Simulink와 Carsim을 이용하여 시뮬레이 션을 진행하였다. 위에서 제안한 시나리오 중에서 시나리오 No.1-1, No.3-1에 대해 자율주행 알고리즘 을 이용하여 시뮬레이션을 수행하였다.
5.1 자율주행 알고리즘 및 시뮬레이션 환경 앞서 제안한 시나리오에 대한 시뮬레이션을 진행 하기 위해서는 자율주행 알고리즘이 필요하다. 본 논 문에서는 자율주행을 위해 모델 예측 제어 기법을 이 용한 종/횡방향 통합 제어 알고리즘을 이용하였다.
본 알고리즘은 전방향 주변 차량의 현재 상태로 부터 미래의 잠재적인 거동을 예측한다. 예측된 정 보를 바탕으로 차선 유지/차선 변경 모드를 결정한 다. 결정된 모드에 따라 예측된 잠재적 주행 환경에 대하여서도 안전을 확보할 수 있는 안전 주행 영역 을 생성한다. 이를 바탕으로 주행 영역 내에서 차량 이 거동되도록 종방향 MPC, 횡방향 MPC를 이용해 서 제어하는 자율 주행 알고리즘이다.16)
시뮬레이션 환경은 다음과 같다. 사용된 차량 모 델은 Carsim에서 제공하는 E-Class, Sedan모델을 이 용하였다. 도로 노면 마찰계수는 일반적인 아스팔 트인 0.85이다. 사용된 차량의 크기는 일반적인 승 용차를 고려해 차폭 1.9 m, 길이 4.946 m이다. 도로 의 폭은 고속도로의 평균적 도로 폭인 3.6 m이다. 시 뮬레이션의 샘플링 타임 0.001초이다.
5.2 자차선 단독주행 시나리오 시뮬레이션 시나리오 No.1-1 자차선 단독주행에 대한 시뮬레 이션 결과는 Fig. 9와 같다.
(a)
(b)
(c)
(d)
Fig. 9 (a) lateral offset, (b) longitudinal velocity, (c) longi- tudinal acceleration and (d) lateral acceleration of Test No. 1-1 scenario
Heungseok Chae․Yonghwan Jeong․Kyongsu Yi․Inseong Choi․Kyongchan Min
곡선로 진입 전에 자율주행 자동차가 도로 곡률 변화를 인지하여 감속을 진행한다. 그리고 감속된 속도로 곡률반경을 돈다. 이때 횡방향 거리는 약 35 cm 수준까지 발생했다. 종방향 속도는 고속도로 최 소 주행속도 기준인 50 km/h 이상이므로 안전성 평 가항목을 만족한다. 종방향 가속도의 2초간 평균의 가장 큰 절댓값은 -0.95 m/s2이다. 횡방향 가속도의 가장 큰 절댓값은 -2.08 m/s2이다. 이는 앞에서 규정 한 안정성 평가항목을 모두 만족한다.
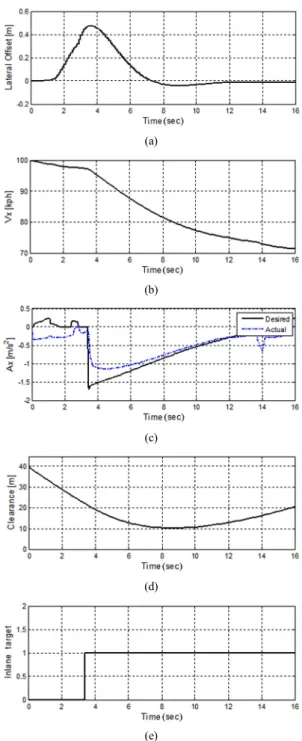
5.3 Cut-in 차량 대응주행 시나리오 시뮬레이션 시나리오 No.3-1 Cut-in 차량 대응주행에 대한 시 뮬레이션 결과는 Fig. 10과 같다.
옆 차선의 선행차량이 자차선으로 Cut-in할 때, 자율주행 차량은 Cut-in 차량에 반응해서 횡방향 거 리가 약 47 cm 수준까지 발생했다. 다소 횡방향 거 리가 크나 차선 범위는 벗어나지 않으므로 횡방향 거리 안전성 평가항목을 만족한다. 종방향 속도가 고속도로 주행속도 기준인 최소 60 km/h 이상이므 로 안전성 평가항목을 만족한다. 종방향 가속도의 2 초간 평균의 가장 큰 절댓값은 -1.11 m/s2이다. 최소 차간거리는 약 10 m이다. 따라서 앞에서 규정한 안 전성 평가항목을 모두 만족한다.
6. 결 론
본 연구의 결과를 요약하면 다음과 같다.
1) 현재 제정되어 있는 자율주행 자동차 임시운행 및 평가 기술 현황과 ISO, Euro NCAP, NHTSA 등 에서 나온 운전자 지원 제어 시스템(ADAS)의 개 별 시스템인 ACC, LKAS, AEB의 기술 규정을 분 석하였다.
2) 현재 제정된 자율주행 자동차 임시운행 허가 규 정에 근거해서 자율주행 자동차 운행기준을 제 안하였다. 또한 자동차 전용도로에서의 자율주 행 자동차 임시운행 허가 평가를 위한 시나리오 를 제안하였다.
3) 자율주행 자동차 임시운행 허가를 위한 안전성 평가항목을 운전자 지원 제어 시스템 개별 ISO 기술 규정, 국내 자동차 전용도로 규정을 근거로 개발하였다. 임시운행 허가여부를 판단하기 위해
(a)
(b)
(c)
(d)
(e)
Fig. 10 (a) lateral offset, (b) longitudinal velocity, (c) longi- tudinal acceleration, (d) clearance and (e) inlane target of Test No. 3-1 scenario
최소한의 안전성 보장 항목으로 횡방향 거리, 종 방향 속도, 종방향 가속도, 횡방향 가속도, 차간 거리의 기준을 개발하였다.
Safety Performance Evaluation Scenarios for Extraordinary Service Permission of Autonomous Vehicle
4) 제안된 시나리오의 타당성을 확인하기 위해 MATLAB/Simulink와 Carsim을 이용하여 시뮬레 이션을 진행하였다. 시뮬레이션을 통해 각 시나 리오의 타당성과 안전성 평가항목의 통과 여부 를 통해 임시운행 허가 여부를 검증하였다.
본 연구의 향후 연구 계획은 다음과 같다. 현재 차 선 유지 상황만 고려했으므로 고속도로 내 차선 변 경, 합류점, 톨게이트 구간도 고려한 시나리오를 연 구할 계획이다. 또한 국내 연간 강수일이 30 % 이상 이므로 기상환경을 고려하여 노면 마찰계수에 의한 영향 시뮬레이션도 검토할 예정이다. 마지막으로 자동차 전용도로에 국한하지 않고 좀 더 복잡한 시 내 도로나 교차로에 대한 평가 등에 대한 후속 연구 를 계획하고 있다.
후 기
본 연구는 국토교통부 및 국토교통과학기술 진흥 원의 연구비 지원(15PTSI-C054118-07)으로 수행된 연구임.
References
1) K. S. Yi, “Vehicle Dynamics Control Appli- cations to Automobiles: Survey and Some New Trends,” Journal of Institute of Control, Robotics and Systems, Vol.20, No.3, pp.298-312, 2014.
2) K. Bengler, K. Dietmayer, B. Farber, M. Maurer, C. Stiller and H. Winner, “Three Decades of Driver Assistance Systems: Review and Future Perspectives,” IEEE Intelligent Transportation Systems Magazine, Vol.6, No.4, pp.6-22, 2014.
3) P. Ioannou, Development and Experimental Evaluation of Autonomous Vehicles for Road- way/Vehicle Cooperative Driving, UCB-ITS- PRR-98-9, 1998.
4) Adopted Regulations for Testing of Autonomous Vehicles by Manufacturers, California Depart- ment of Motor Vehicles, 2014.
5) Autonomous Vehicle Testing License, Nevada
Department of Motor Vehicles, 2013.
6) F. Fahrenkrog, Evaluation of Automated Driving Functions, ITS Europe, 2014.
7) ISO 15622 Intelligent Transport Systems - Adaptive Cruise Systems - Performance Require- ments and Test Procedures, ISO, 2010.
8) Euro NCAP AEB Test Protocol, Euro NCAP, 2013.
9) ISO 11270 Intelligent Transport Systems - Lane Keeping Assistance Systems - Performance Requirements and Test Procedures, ISO, 2014.
10) Y. H. Jeong, An Evaluation Scenario of Safety Performance for Extraordinary Service Permis- sion of Autonomous Vehicle, KASA Spring Conference Proceedings, p.44, 2015.
11) J. H. Bak, K. H. Lee and C. H. Lee, “Synch- ronous Interfusion of the Compensatory Filters Based on Multi-rate Sensors for the Control of the Autonomous Vehicle,” Transactions of KSAE, Vol.22, No.3, pp.220-227, 2014.
12) P. Ioannou and M. Stefanovic, Evaluation of the ACC Vehicles in Mixed Traffic: Lane Change Effects and Sensitivity Analysis, UCB- ITS-PRR-2003-3, 2003.
13) H. G. Kim, K. S. Oh and K. S. Yi, “Deve- lopment of Speed Control Algorithm for Auto- nomous Vehicle,” KSAE Spring Conference Proceedings, pp.709-714, 2012.
14) D. W. Kim and K. S. Yi, “Design of a Path for Collision Avoidance and Path Tracking Scheme for Autonomous Vehicles,” KSAE Spring Con- ference Proceedings, pp.1268-1277, 2010.
15) J. Schindler, Autonomous Traffic-jam Clearance Using a Frugal Adaptive Cruise Control Stra- tegy, Conference on Agent-Based Modeling in Transportation Planning and Operations, 2013.
16) J. Y. Lee, Robust Model Predictive Control based Automated Driving Control Algorithm for Improvement of Safety and Ride Comfort, Ph. D. Dissertation, Seoul National University, Seoul, 2015.