Copyright
Ⓒ2016 KSAE / 145-05 pISSN 1225-6382 / eISSN 2234-0149 DOI http://dx.doi.org/10.7467/KSAE.2016.24.6.649 Transactions of KSAE, Vol. 24, No. 6, pp.649-659 (2016)
주행거리 연장형 전기자동차의 차량제어 알고리즘 설계 및 운전성 확보를 위한 엔진 발전시스템 제어
박 용 국
*인하공업전문대학 자동차과
Design of Vehicle Control Algorithm and Engine-generator Control for Drivability of Range-extended Electric Vehicle
Youngkug Park
*Department of Automotive Engineering, Inha Technical College, Incheon 22212, Korea (Received 10 May 2016 / Revised 1 July 2016 / Accepted 1 August 2016)
Abstract : This paper describes control algorithm and control structure of vehicle control unit for range-extended electric vehicle equipped with engine-generator system, and specially presents methods which determine optimal operating points and decreases a vibration or a shock for operating the engine-generating system. The vehicle control algorithm is consisted of several parts which are sequence control, calculation of wheel demand torque, determination of operating points, and management of operating points and so vehicle controller has be made possible to efficiently manage calibration parameters. The control algorithm is evaluated by driving test modes, launching performance and operating engine-generator system and so on. In conclusion, this paper present methods for extending a mileage, improving a launching performance and reducing vibration or shock when the engine-generating system is starting or is stopping.
Key words : Range-extended electric vehicle(주행거리연장형전기자동차), Vehicle control unit(최상위제어기), Control algorithm(제어알고리즘), Control structure(제어구조), Engine-generating system(엔진 발전시스템), System efficiency(시스템효율), Operating point(운전점), Drivability(운전성), Vibration(진동)
Nomenclature 1) PE : electrical power
PM : mechanical power FRG : final gear ratio T : torque V : velocity η : efficiency
Subscripts dmd : demand
*
Corresponding author, E-mail: [email protected]
Mot : motor acc : accessory sys : system Bat : battery Chg : charge Dch : discharge
1. 서 론
최근 자동차 시장은 환경문제 및 에너지 문제에
효과적으로 대응하기 위하여 전기 동력을 이용하는
친환경자동차 개발이 급속하게 늘어나고 있다. 순
박용국
수 전기자동차(Electric Vehicle, EV)는 고가의 대 중 량 배터리로 인하여 주행거리에 대한 강한 압박을 가지고 있는 것이 현실이다.
이러한 문제를 효과적으로 해결하기 위하여 연구 개발되고 있는 것이 주행거리 확장형 전기자동차 (Range-extended Electric Vehicle, Re-EV)이며, 이는 엔진 발전시스템의 전기에너지를 이용하여 고전압 배터리를 충전 혹은 구동 모터에 공급함으로써 비 슷한 중량의 배터리를 장착한 순수 EV의 주행거리 보다 확장시킬 수 있는 장점을 갖는다.
1)하지만 엔진 발전시스템의 기동 혹은 정지 시 발 생되는 진동 및 발전을 수행할 때 발생되는 부밍소 음(booming noise)으로 인한 이질감 등으로 차량 운 전성이 나빠질 수 있으며, 특히 엔진 발전시스템의 운전점을 효율적으로 관리하지 못하게 되면 주행거 리를 연장할 수 있다는 Re-EV의 최대 장점을 극대 화 할 수 없게 된다.
이러한 이유로 본 연구에서는 진동 및 소음으로 인한 Re-EV의 운전성 악화 요인을 최소화할 뿐만 아니라 효율적인 엔진 발전시스템의 운전점을 관리 할 수 있도록 차량 최상위제어기의 알고리즘을 개 발하고 차량성능 제어변수를 효과적으로 관리할 수 있는 제어구조를 도출하여, 최종적으로 실제 차량 을 통하여 제어기능을 시험・평가하였다.
2. Re-EV 시스템
본 연구에 사용된 차량은 한국산업기술진흥원
“Re-EV SUV 통합 플랫폼 기술개발”과제에서 개발 된 것으로써,
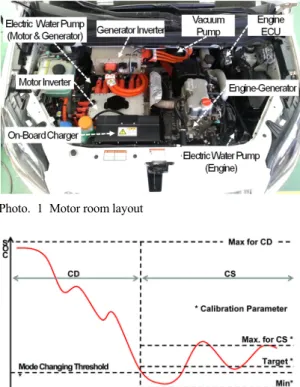
2)Photo. 1과 같이 기존 양산차량의 엔 진룸에 엔진 발전시스템, 구동 모터 시스템, 충전시 스템, 냉각시스템 및 브레이크 작동을 위한 진공펌 프 등을 탑재하고 있다.
한편, 차량에 전기에너지를 공급하는 고전압 배 터리는 차량하부에 장착되어 있으며, 이들 각 시스 템들은 CAN(Controller Area Network)및 Pin-Pin 통 신방식으로 최상위제어기(Vehicle Control Unit, VCU)와 연결 된다.
일반적으로 Re-EV의 운전모드는 배터리 충전상 태(State Of Charge, SOC)의 변화에 따라 Fig. 1과 같 이 CD(Charge Depleting)모드와 배터리 충전상태를
Photo. 1 Motor room layout
Fig. 1 System operating modes with respect to SOC
관리하는 CS(Charge Sustaining)모드로 구분된다.
3)CD모드는 순수 전기자동차와 같이 주행하는 상 태이며, CS모드는 차량에 탑재된 발전시스템을 이 용하여 구동에 필요한 에너지를 공급하거나 고전압 배터리를 충전하여 주행거리를 연장하도록 하는 운 전 상태이다.
따라서 Re-EV의 장점을 극대화하기 위해서는 CS 모드 상태에서 엔진 발전시스템의 효율적인 운전으 로 배터리 SOC를 관리하고 이질감을 최소화할 수 있는 차량 운전제어 알고리즘이 요구된다.
2.1 제어알고리즘
Re-EV는 전 운전영역에서 전기동력을 이용하는
구동모터를 통하여 휠 요구토크를 실현하여야 하
며, 특히 Fig. 1의 CS모드에서는 엔진 발전시스템을
구동시켜 휠(wheel) 요구토크 뿐만 아니라 배터리
관리가 필요하기 때문에 엔진 발전시스템의 운전점
은 기계적 동력(mechanical power)관점이 아닌 전기
적 동력(electrical power)기반으로 해석되는 것이 타
당하다.
3)주행거리 연장형 전기자동차의 차량제어 알고리즘 설계 및 운전성 확보를 위한 엔진 발전시스템 제어
Fig. 2 Schematic diagram for determinating engine-generator operating points
이러한 이유로 본 연구에서는 Fig. 2와 같은 엔진 발전시스템의 운전제어 알고리즘을 도입하였다.
현재 차량시스템의 전체 전기적 요구동력은 식 (1)과 같이 현재 요구토크와 차속으로부터 실험을 통한 모터효율을 찾아 이를 현재 모터의 기계적 동 력과의 관계로부터 모터에 공급되어야 되는 전기적 동력을 구한 뒤, 이를 현재 차량의 부가적인(acce- ssory)전기적 동력을 합한 것이다.
×
(1) 식 (1)의 전기적 요구동력으로부터 배터리의 부 하관리(load leveling)를 통하여 최종 엔진 발전시스 템에 요구되는 동력이 계산되고, 이를 바탕으로 엔 진 발전시스템의 최적 작동곡선(Optimal Operating Line, OOL)으로부터 엔진 발생토크 및 엔진속도를 각각 계산하게 된다.
2.2 제어구조
일반적으로 제어기의 소프트웨어 설계분야에서 중요한 것은 제어기능을 제대로 구현되어야 하며, 특히 제어흐름을 명확하게 함으로써 제어기능 의 디버깅(debugging)뿐만 아니라 차량성능을 조정하 는 등 기타 후속작업의 편의성을 고려할 수 있도록 기능별 제어구조를 갖도록 하는 것이다.
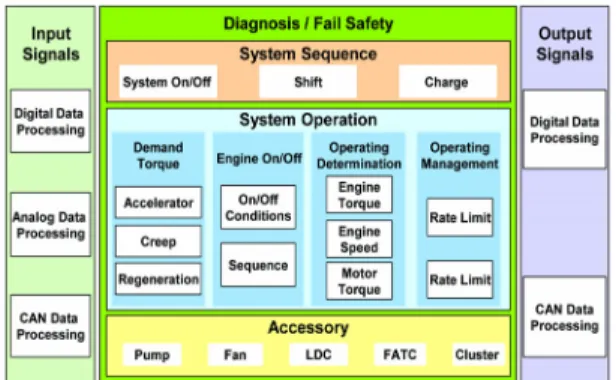
4)이러한 이유로 본 연구과정에서 제안하고자 하는 제어구조는 Fig. 3과 같다. 제어구조는 입력 및 출력 신호를 처리하는 부분, 운전자의 차량 기동의지에 따른 차량시스템 시퀀스를 담당하는 부분(system sequence), 엑셀페달, 브레이크 및 변속레버의 위치 변화 등과 같이 운전자 의지에 의한 휠 요구토크 계 산부(driver demand torque), 엔진 발전시스템의 기동
Fig. 3 Schematic diagram of software structure
판단 및 기동시퀀스(engine on/off)를 제어하는 부분, 엔진 발전시스템 및 휠 요구토크를 바탕으로 구동 모터의 운전점을 결정하는 부분(operating determi- nation), 이로부터 운전성 및 응답특성을 고려하여 최종적으로 이를 관리하는 부분(operating management), 기타 차량 부가장치(accessory)들을 제어하는 부분 으로 구성된다.
한편, 차량으로부터 입력되는 각종 신호들에 대 한 진단 및 고장판단 기능이 구동될 수 있도록 하였다.
2.2.1 시스템 시퀀스제어
이는 시동 버튼조작에 따른 시스템 기동 및 종료 를 담당하는 부분, 변속레버 조작에 따른 변속 단 판 단부분 및 충전케이블 연결 유무에 따라 충전 시 시 스템을 제어하는 부분으로 구성된다.
일반적으로 EV는 시스템 기동 및 충전 시에는 고 전압 배터리 측의 릴레이들을 먼저 연결하고 이들 이 완전히 연결되었다는 신호를 확인 하고, 저전압 보조배터리 관리를 위한 DC-DC변환기 및 OBC (On-Board Charger)등이 구동되도록 되어있다.
Fig. 4는 시스템 기동을 위한 시퀀스 제어부의 개 략도를 나타낸 것이다.
2.2.2 휠 요구토크
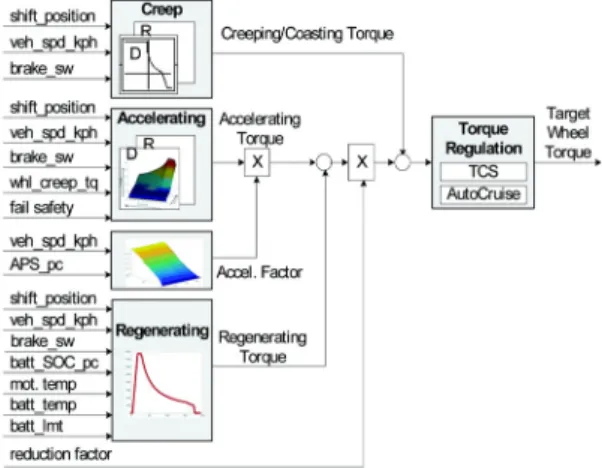
휠 요구토크 계산 부분은 Fig. 5와 같이 크게 차속
에 따른 크립핑(creeping) 및 코스팅(coasting)토크를
계산하는 부분(creep), 운전자의지 즉 변속레버 위
치, 액셀페달 및 차속 변화에 따른 토크를 계산하는
부분(accelerating) 및 운전자의 브레이크 페달, 차속에
따른 회생제동 토크를 계산하는 부분(regenerating)으
로 크게 구성된다.
Youngkug Park
Fig. 4 Control sequence of system start up
Fig. 5 Schematic diagram for determinating wheel demand torque
2.2.3 운전점 결정
본 연구에 적용된 구동용 모터는 감속기를 통하 여 차량의 바퀴와 연결되는 구조이다. 따라서 구동 용 모터의 운전점(operating point)은 식 (2)와 같이 간단하게 표시된다.
÷ (2) 한편, 엔진 발전시스템의 최적 운전점은 엔진 및 발전기의 단품 효율 시험데이터로부터 Fig. 6과 같 이 계산된다.
엔진 발전시스템의 시스템효율은 엔진과 발전기 가 직렬로 연결되어 엔진 출력 동력을 발전기가 흡 수하여 발전하기 때문에 식 (3)과 같이 표시할 수 있
Fig. 6 Flowchart for calculating optimal operating points
Fig. 7 Schematic diagram of iteration method for finding optimal operating points
고, 시스템의 전기적 동력은 식 (4) 및 식 (5)와 같이 각각 정의된다.
×
(3)
×
(4)
×
×
(5)
따라서 엔진 발전시스템의 운전점은 상기 식들을 이용하여 오프라인 상에서 Fig. 7과 같은 방법으로 최종적으로 시스템 요구동력에 따라 엔진 발생토크 와 발전기 속도가 계산된다.
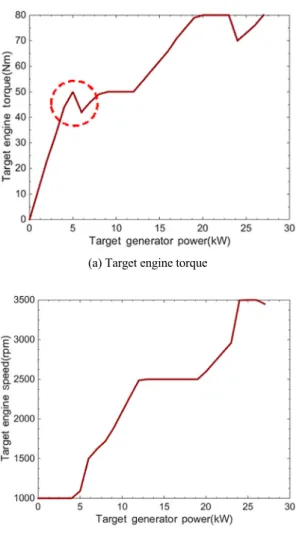
Fig. 8은 상기의 방법으로 계산된 운전점 결과를
나타낸 것으로써, 이는 2.2절에서 설명한 운전점 결
정부에 제어 맵(control map)으로 적용되며, 적용된
제어 맵은 향후 차량성능시험을 통하여 운전성을
고려하여 보정될 수 있도록 하였다.
Design of Vehicle Control Algorithm and Engine-generator Control for Drivability of Range-extended Electric Vehicle
(a) Target engine torque
(b) Target generator speed
Fig. 8 Results of optimal operating point with respect to target generator power
한편, Fig. 8에서 각 운전점 연결선이 부드럽지 못 한 이유는 정적상태(static state)의 엔진 및 발전기 단 품 효율시험 데이터를 근거로 작성되었으며, 또한 시험데이터에 오류가 있는 것으로 판단된다.
따라서 제어알고리즘 개발 안에 따라 엔진 및 발 전기의 단품성능 시험에 대한 요구사양이 제시 되 어야 될 필요성이 있다.
엔진 발전시스템의 운전점을 최종적으로 결정하 기 위해서는 Fig. 2에서와 같이 먼저 배터리 부하관 리가 이루어져야한다.
식 (6) 및 식 (7)은 배터리 부하관리를 위한 지배방 정식으로써, 각각 충전영역 및 방전영역에서의 시 스템효율을 나타낸 것이다.
×
(6)
×
(7)
where,
: Battery power, design variable
: Demand power, design variable
: Equivalent factor
각 운전영역에서의 시스템효율은 앞서 구한 엔진 및 발전기의 시스템 효율 관계식을 이용하여 구한 각 운전점에서의 연료소비율(brake specific fuel consumption)에 대하여 배터리 동력(
)후보군과 전기동력 기반 시스템 요구동력(
) 후보군을 입 력하여 배터리를 포함한 최대 시스템 효율 운전점 을 찾는다.
식 (6)의 분자의 배터리 동력부분을 마이너스로 표시한 이유는 시스템효율을 계산하기 위한 소스코 드(Fig. 9)에서와 같이 충전영역의 배터리 후보군을 음의 값으로 표시하였기 때문이다.
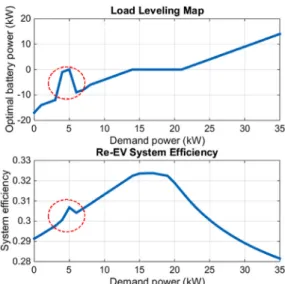
이러한 관계를 이용하여 최종적으로 요구동력변 화에 따른 배터리 부하관리 및 이에 따른 시스템 효 율관계는 Fig. 10과 같다.
그림에서 배터리 부하관리 맵은 Fig. 2의 엔진발 전 시스템 제어알고리즘에 적용되어 최종적으로 엔 진발전 시스템의 운전점 결정에 이용된다.
엔진 발전시스템 작동 시 배터리를 포함한 시스 템 효율 결과를 살펴보면, 전 운전영역에서 시스템 효율은 28 % ~ 32 % 범위를 나타내고 있는데, 이는 Fig. 9의 소스코드에서 알 수 있듯이 엔진 및 발전기 단품의 효율뿐만 아니라 배터리 평균효율 및 연료・
전기에너지 등가치(equivalent factor)의 영향을 받는다.
따라서 전체 시스템의 효율을 향상시키기 위해서
는 시스템의 단품 효율을 증가시켜야 하며, 오구동
력에 따른 시스템 효율을 정확하게 파악하기 위해
서는 배터리 평균효율 및 연료・전기에너지 등가치
를 정확하게 시험해야 될 것으로 판단된다.
박용국
Fig. 9 Source code for calculating system efficiency
하지만 계산을 통하여 얻어진 시스템 전체효율의 경향을 살펴보면, 요구동력이 비교적 증가됨에 따 라(약 20 kW이상) 배터리 충전 요구량이 점차 증가 하게 되어 시스템효율의 감소율이 급격히 감소되는 전형적인 직렬형(series)전기자동차의 효율 특징을 갖는다고 할 수 있다.
3)Fig. 10 Results of Schematic diagram of iteration method for finding optimal operating points
한편, Fig. 10에서 점선으로 표시된 부분은 엔진 및 발전기 시험결과의 측정오류로 발생되는 것으로 판단된다. 이러한 이유는 Fig. 8의 엔진발생 토크 운 전점 결정부에서도 같은 위치에서 이상 현상이 나 타나기 때문이다.
2.2.4 운전점 관리
이 부분은 앞서 결정된 운전점을 최종적으로 각 제어기로 전송하기 전에 급격한 운전점 변화로 발 생되는 진동 또는 충격 등 운전성 악화요인을 최소 화하기 위하여 변화율을 조정하는 부분이다.
운전점 변화율 결정인자는 구동모터의 경우에 차 속 혹은 구동용 모터의 회전수이며, 엔진토크의 경 우는 발전기의 회전수로 하였다.
이 영역은 운전성과 밀접한 관계를 갖기 때문에 차량시험을 통한 보정 작업이 제일 많이 이루어지 는 부분이다.
3. 엔진 발전시스템 제어
앞 절의 운전점 관리부에서 최종적으로 결정된 엔진 발전시스템의 운전점은 엔진 발생 토크와 엔 진 발전시스템의 속도이다.
엔진 발생토크는 엔진 제어기로 송부되어 공기
량, 연료량 및 점화시기 등을 통하여 구현된다.
주행거리 연장형 전기자동차의 차량제어 알고리즘 설계 및 운전성 확보를 위한 엔진 발전시스템 제어
한편, 엔진 발전시스템의 속도는 비례적분기를 이용하여 목표속도와 발전기의 현재 속도의 오차를 감소시키는 방향으로 발전기 제어기에 토크지령을 변화시켜 제어하게 된다.
3.1 시스템 작동조건
엔진 발전시스템 구동조건은 Fig. 1에서 설명한 바와 같이 SOC변화에 따른 운전모드 변화뿐만 아 니라 차속에 따른 배터리 및 시스템 요구동력, 엔진 의 예열 요청에 대한 허가 및 운전자요구로 Fig. 11 과 같이 구성된다.
그림에서 알 수 있듯이 차량의 속도가 일정속도 이하로 운행되고, CS운전모드에 진입하거나, SOC 가 배터리 내구성에 영향을 미치는 값 이하로 낮아 지거나, 현재 배터리 제어기로부터 제공되는 방전 가능 전력이 시스템 요구동력보다 작거나, 엔진제 어기의 예열요청을 최상위제어기가 허가 하거나, 운전자가 임의로 엔진발전을 필요로 할 때 엔진 발 전시스템은 구동된다.
특히 운전자의 요구에 의하여 엔진 발전시스템을 기동 시킬 수 있도록 하였는데, 이는 현재 비슷한 구조 의 양산차량에서도 적용되어있으며, 이는 주행 중 운 전자가 임의로 엔진 발전시스템을 기동시켜 배터리 를 관리하거나 운전성을 향상시킬 수 있도록 한 것이다.
이렇게 함으로써 차량 시스템 및 운전자의 요구 를 만족시킬 수 있다고 판단되며, 차량시험을 통하 여 상세 구동조건을 조정할 수 있도록 하였다.
Fig. 11 Control logic of engine-generator on conditions
3.2 기동 및 정지 시퀀스제어
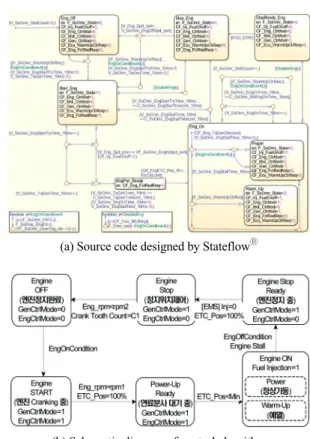
이 부분은 앞 절의 엔진 발전시스템 가동조건에 의하여 일련의 과정을 통하여 시스템을 가동 혹은 정지 시키는 부분으로써 Fig. 12와 같이 설계되었다.
Fig. 12(a)는 Stateflow
Ⓡ를 이용하여 작성된 소스코 드이고 Fig. 12(b)는 이를 간략화하여 표시한 것이다.
시스템정지 상태에서는 엔진 및 발전기의 제어모 드(control mode)는 각각 0인 상태로서 어떠한 제어 동작도 이루어지지 않음을 의미한다.
앞 절 3.1에서 설명된바와 같이 엔진 발전시스템 의 작동조건이 되어 발전기에 의한 엔진 크랭킹 (cranking)상태에 진입하면, 엔진 및 발전기는 토크 제어모드로 변환됨과 동시에 차량제어기는 엔진제 어기에 전자식 쓰로틀 밸브(electrical throttle valve) 는 전개(wide open)시킬 것을 요구한다.
이는 엔진기동 시 펌핑 손실(pumping loss)을 최소 화함으로써 불필요한 발전기 전력손실을 방지할 수 있을 뿐만 아니라 기동 시 발생되는 진동을 줄일 수
(a) Source code designed by StateflowⓇ
(b) Schematic diagram of control algorithm Fig. 12 Control of engine-generator system
Youngkug Park
있기 때문이다.
발전기에 의하여 엔진속도가 증가되어 운전점 결 정 부분(2.2.3절)에서 결정된 목표속도 부근까지 도 달하게 되면 엔진은 연료분사 대기상태가 되고, 이 때 엔진제어기는 전자식 쓰로틀 밸브를 제어하여 엔진 발생토크 목표치에 해당되는 값으로 유지한다.
전자식 쓰로틀 밸브가 정상적으로 목표 엔진발생 토크 제어되었고 엔진회전수가 목표회전수에 도달 되면, 차량제어기는 엔진제어기에 연료분사 허가를 함으로써 엔진은 정상상태 운전을 하게 된다.
만약 엔진이 정상상태로 진입하였으나 엔진스톨 (stall)현상이 몇 번 이상 발생되거나 혹은 엔진작동 조건이 해제된 경우에는 엔진정지 준비상태로 진입 하게 된다.
이 상태에서 차량제어기는 연료분사허가를 취소 하고 전자식 쓰로틀 밸브를 전개할 것을 요구함과 동시에 발전기 토크제어를 통하여 엔진속도를 점차 낮추면서 엔진 크랭크각 센서값이 일정한 각도 범 위 내에 올 수 있도록 엔진정지 위치제어를 수행하 게 된다.
이러한 제어를 하는 이유는 엔진 재 기동 시 일관성 있는 운전성을 확보할 수 있는 장점이 있기 때문이다.
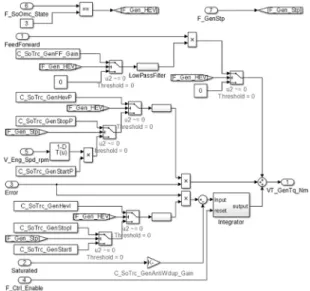
5)3.3 속도제어
엔진 발전시스템은 엔진과 발전기가 기계적으로 직결된 상태이기 때문에 최상위제어기에서 결정된 운전점 중 엔진 발생토크는 엔진제어기로 전송되 고, 시스템의 속도는 Fig. 13과 같이 운전점 결정부 에서 결정된 목표속도와 현재 발전기 속도차에 의 한 비례적분기의 출력 토크가 발전기 제어기로 전 송되어 제어된다.
그림에서 상수 값으로 표시된 부분은 각 운전상 태 및 현재 시스템 회전수에 따라 속도제어기의 게 인(gain)을 나타낸 것으로써, 이는 운전상태 별 시스 템에서 발생되는 진동을 최소화 할 수 있을 뿐만 아 니라 응답성을 보정(calibration)하기 위한 것이다.
4. 시험결과
앞 절과 같이 Matlab/Simulink
Ⓡ구성된 제어 알고 리즘을 Photo. 2와 같이 임베디드 시스템에 탑재하
Fig. 13 Control logic of engine-generator speed
Photo. 2 Specification of embedded controller for Re-EV
여 실제 차량상태에서 모드주행, 발진성능 및 엔진 발전시스템 기동 시험을 실시하였다.
4.1 주행모드 시험
차량주행은 도심주행(FUDS, Federal Urban Driving Schedule) 및 고속도로주행(HWFET, HighWay Fuel Economy Test)모드에 대하여 Fig. 14와 같이 각각 시 행 되었다.
시험은 초기 고전압 배터리 완충상태에서 진행되 었으며, 그림과 같이 차량이 시험모드를 완벽히 주 행하고 있는 것을 확인 할 수 있다. 이는 앞서 설명한 차량제어기가 원활하게 작동하고 있음을 의미한다.
또한 주행시간이 경과됨에 따라 고전압 배터리
방전이 지속적으로 이루어지기 때문에 엔진 발전시
스템이 정상적으로 작동되고 있는 것을 확인할 수
있다.
Design of Vehicle Control Algorithm and Engine-generator Control for Drivability of Range-extended Electric Vehicle
(a) FUDS mode
(b) HWEFT mode Fig. 14 Results of vehicle test modes
특히 엔진 발전시스템의 최초 기동은 고속도로 주행모드에서 보다 빨리 이루어짐을 알 수 있다. 이 는 고속도로 주행모드에서 상대적으로 많은 시스템 요구동력이 필요하여 배터리의 방전량이 증가되었 기 때문이다.
한편, 엔진 발전시스템이 기동되면 Fig. 10에서와 같이 요구동력이 증가될수록 시스템효율은 현저하 게 낮아지는 특성이 있기 때문에 차량의 총 주행거 리를 확보하기 위해서는 최대한 엔진 발전시스템의 작동빈도를 낮추면서 적정 범위 내에서 고전압 배 터리 전력을 유지・관리할 수 있는 추가 방안이 필요 하다.
4.2 발진성능 시험
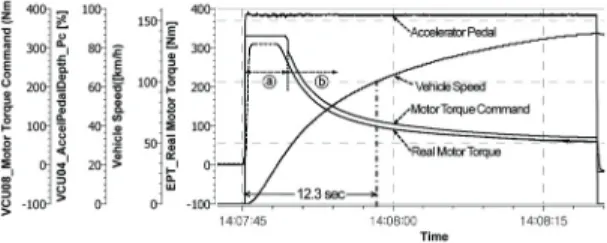
정지상태에서 차속이 100 km/h 도달하는 시간을 평가하기 위하여 Fig. 15와 같이 차량제어기의 토크 명령값(motor torque command) 및 구동 모터 제어기 의 현재 토크 실현값(real motor torque)에 따른 차량 속도(vehicle speed)를 각각 계측하였다.
정지 상태에서 차속이 100 km/h 도달하는 시간은 약 12.3초가 달성되었는데, 이는 차량개발 목표 성 능보다 약 1.3초 초과되었다.
이는 그림에서 명확히 알 수 있듯이 모터의 정 토크
Fig. 15 Launching performance of vehicle
구간ⓐ 및 정파워 구간ⓑ에서 차량제어기의 명령 보다 실제 모터토크 값이 작게 실현되었기 때문이다.
이러한 이유는 차량에 탑재된 모터제어기에서 모 터를 자체보호하기 위하여 토크증가율을 제한하는 불필요한 기능을 탑재하였기 때문이며, 향후 이를 수정하면 차량 개발목표를 만족시킬 수 있을 것으 로 판단된다.
4.3 엔진 발전시스템 기동시험
엔진 발전시스템은 고전압 배터리의 전력을 유 지・관리하기 위하여 반드시 필요하지만, 시스템특 성 상 기동 혹은 종료 시 진동이 발생되기 쉬운 구조 로 되어있다. 이러한 이유로 Fig. 16과 같이 시스템 기동 및 종료 시 특성시험을 진행하였다.
엔진 발전시스템의 기동조건(3.1절)에 의하여 시 스템 기동이 시작되면 기동시퀀스(3.2절)에 따라 정 확하게 구동되고 있는 것을 확인 할 수 있을 뿐만 아 니라 시스템 기동 시 전자식 쓰로틀은 기동 초기에 는 펌핑 손실을 최소화하기 위하여 전개되고 연료 분사 직전에는 목표 토크를 발생하기 위한 위치로 제어되고 있다.
발전기 토크(generator torque)는 차량제어기의 연 료분사 허가(injection on)시점을 기준으로 정(+)토 크에서 부(-)토크로 변화된다.
이는 엔진 크랭킹 영역부터 목표 엔진속도 도달 전까지 발전기의 구동력에 의하여 엔진이 회전하 며, 연료가 분사되어 엔진에서 토크가 발생되기 시 작하면 발전기가 엔진 발생토크를 흡수하여 발전하 기 때문이다.
엔진 발전영역은 그림에서와 같이 분사초기 연소 불안정 영역을 거쳐 안정영역으로 각각 구분할 수 있다.
연소 불안정영역에서 발생되는 발전기토크의 변
박용국
(a) Start sequence
(b) Off sequence
Fig. 16 Driving characteristic of engine-generator system
화는 차량에서 진동현상으로 나타나 운전성에 나쁜 영향을 미칠 수 있다.
이러한 이유로 Fig. 13에서 제시한 바와 같이 엔 진작동 상태에 따라 발전기 제어 게인을 각각 구성 한 것이다.
한편, Fig. 16(b)는 엔진발전기 시스템이 종료될 때의 제어결과를 나타낸 것으로써, 연료분사 종료 명령 전에는 안정적으로 발전이 이루어지고 있는 것을 확인할 수 있다.
하지만 그림에 점선으로 표시된 영역에서 발전기 속도가 급격하게 변화되는 것을 확인 할 수 있다. 이 로 인하여 엔진정지 시 진동이 발생되는 것을 확인 하였다.
이는 Fig. 12에서 설명된 엔진정지 위치제어 때문 에 발생되는 것으로 판단된다. 엔진정지 위치제어 는 엔진에 장착된 크랭크 센서신호를 이용하여 항 상 일정한 위치범위 내 엔진이 정지되도록 발전기
를 제어하여 이루어진다.
하지만 차량에서 엔진 크랭크센서 신호가 CAN 을 이용하여 차량제어기로 전달되기 때문에 실제 값과 시간지연이 존재하게 된다. 이러한 이유로 제 어가 원활하게 되지 않은 것으로 판단된다.
따라서 엔진 발전시스템 정지 시 발생되는 진동 을 저감하기 위하여 크랭크 신호를 차량제어기가 Pin-Pin방식으로 직접 받아 현재와 같이 엔진정지 위치제어를 유지하는 방안 혹은 엔진의 흡배기 밸 브의 전자화 방안 등이 고려되어야 될 것으로 판단 된다.
5. 결 론
1) Re-EV에 적용 가능한 운전제어 알고리즘 및 엔 진 발전시스템의 효율을 증가시키기 위한 부하 관리 및 최적 운전점 도출방안을 제시하였다.
2) 명확한 제어흐름의 시스템 제어구조를 제시하 고, 이를 바탕으로 차량제어로직을 개발하였으 며, 차량성능에 영향을 미치는 제어변수를 도출 하였다.
3) 주행모드시험을 통하여 차량제어로직의 타당성 을 검증하였다.
4) 엔진 발전시스템 기동 및 정지 시퀀스의 적정성 을 확인하였으며, 진동 발생 원인을 분석하여 이 를 억제할 수 있는 방안을 제시하였다.
이상의 결과를 바탕으로 향후 제어기능에 대한 비교시험을 통하여 차량의 주행거리를 효과적으로 확대할 수 있는 방안을 제시하고자 한다.
References
1) Y. Y. Ham, S. H. Song, B. M. Min, T. S. No, J.
W. Lee, H. D. Lee and C. S. Kim, “A Control Algorithm for Highly Efficient Operation of Auxiliary Power Unit in a Series Hybrid Elec- tric Bus,” Transactions of KSAE, Vol.11, No.5, pp.170-175, 2003.
2) T. C. Jeong, J. W. Kim, S. M. Kim, D. W. Kang
and Y. J. Noh, “A Study on Strategy of Battery
SOC for Extended Range EV as Vehicle Cruising
Test,” KSAE Annual Conference Proceedings,
pp.1757-1761, 2013.
주행거리 연장형 전기자동차의 차량제어 알고리즘 설계 및 운전성 확보를 위한 엔진 발전시스템 제어