기상 및 교통 자료를 이용한 교통류 안전성 판단 지표 개발
박현진․주신혜․오철*
한양대학교 교통․물류공학과
Development of an Evaluation Index for Identifying Freeway Traffic Safety Based on Integrating RWIS and VDS Data
PARK, Hyunjin․JOO, Shinhye․OH, Cheol*
Department of Transportation and Logistics Engineering, Hanyang University, Gyeonggi 426-791, Korea
Abstract
This study proposes a novel performance measure, which is referred to as Hazardous Spacing Index (HSI), to be used for evaluating safety of traffic stream on freeways. The basic principle of the proposed methodology is to investigate whether drivers would have sufficient stopping sight distance (SSD) under limited visibility conditions to eliminate rear-end crash potentials at every time step. Both Road Weather Information Systems (RWIS) and Vehicle Detection Systems (VDS) data were used to derive visibility distance (VD) and SSD, respectively.
Moreover, the K-Nearest Neighbors (KNN) method was adopted to predict both VD and SSD in estimating predictive HSIs, which would be used to trigger advanced warning information to encourage safer driving. The outcome of this study is also expected to be used for monitoring freeway traffic stream in terms of safety.
본 연구는 도로 기상정보 시스템(RWIS : Road Weather Information System)에서 수집되는 시정거리와 차량검지 기(VDS : Vehicle Detection System)에서 수집되는 속도 자료를 이용하여 교통류 안전성을 판단하였다. 교통류의 안 전성 측면에서 시정거리(VD : Visibility Distance)가 정지시거(SSD : Stopping Sight Distance)보다 길어야 이벤트 발생 시 안전하게 정지하거나 위험한 상황을 회피할 수 있다. 운전자에게 사고예방을 위한 능동적 대응이 가능하도 록 하는 가치있는 정보를 제공하기 위해 최근접이웃 예측기법(KNN : K-Nearest Neighbors Method)을 활용하였다.
또한, 교통류 안전성에 대한 운전자의 이해도 증진 및 객관성을 위하여 안전성 지표(LOHSI : Level of Hazardous Spacing Index)를 제시하였다. 본 연구결과는 교통류의 안전성 향상을 위한 효율적인 교통운영을 지원 할 수 있을 것이다.
Keywords
k nearest neighbors, road weather information system, visibility distance, stopping sight distance, traffic safety 최근접이웃예측기법(KNN), 도로기상정보시스템(RWIS), 시정거리, 정지시거, 교통안전
* : Corresponding Author Received 24 June 2014, Accepted 3 October 2014
[email protected], Phone: +82-31-400-5158, Fax: +82-31-400-4239
Ⓒ Korean Society of Transportation
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Article
서론
센서 및 통신 기술 발전은 과거에 비해 보다 신뢰성 있고 다양한 교통자료 및 기상자료 등의 취득을 가능하 도록 하였다. 이러한 첨단 시스템의 발전에 따라 수집된 자료를 이용하여 교통상황과 기상상황에 대한 다양한 연 구가 활발히 진행되고 있다. 특히 강우, 강설, 안개등의 기상상태변화는 운전자의 주행환경에 영향을 미치는 요 인으로 교통정체 및 사고 유발과 관계가 있다(Andery et al.(2003), Lee et al.(2006)). 도로의 운영 효율을 저하시키는 요소로 작용하는 기상악화는 차량의 차두간 격과 속도에 영향을 미치게 되어 도로용량을 감소시키는 요인으로 작용하며, 교통사고 발생으로 인한 차로감소 등의 상황을 유발한다(FHWA(2000)). 또한 고속도로 에서는 일반도로보다 기상상태에 따른 통행속도 변화 민 감도와 교통사고 심각도가 높게 나타나는 경향이 있다 (Garber N. J. et al.(1989)). 따라서 본 연구에서는 고속도로에서의 기상상태에 따른 시정거리와 교통조건인 속도에 따른 교통류의 안전성 판단 알고리즘 개발을 목 적으로 하였다.
실제 도로 기상과 기상청에서 제공하는 날씨 는 시간 적 공간적 차이가 있기 마련이며, 도로 운영․관리 관점 에서 기상정보 수집은 일반 기상 예보와는 다른 중요한 의미를 가진다. 따라서 본 연구에서는 도로노면에서 직접 수집되는 도로 기상정보 시스템(RWIS : Road Weather Information System) 자료와 차량검지기(VDS : Vehicle Detection System) 자료를 활용하였으며, 분석 대상은 구간은 2012년 서울-춘천고속도로 서종대교의 RWIS와 VDS자료를 사용하였다. VDS에서 수집되는 속도 자료를 이용하여 산출된 정지시거(SSD : Stopping Sight Distance)와 RWIS에서 수집되는 시정거리(VD : Visibility Distance)의 관계를 분석하여 교통류 안 전성을 판단하였다. 운전자에게 사고예방을 위한 능동적 대응이 가능하도록 가치있는 정보 제공을 위하여 예측 정보를 이용하였다. 교통류 안전성 판단은 SSD보다 VD 가 길어야 안전하다는 기본 개념을 적용하였으며, 속도 를 예측하여 SSD를 산출하고 RWIS에서 수집되는 VD 를 예측하였으며, 이때 최근접이웃 예측기법(KNN : K-Nearest Neighbors Method)을 적용하여 예측을 실시하였다. 교통류 안전성의 객관적인 상대비교 평가를 위하여 정규화 과정을 거쳐 위험성 지표(LOHSI : Level of Hazardous Spacing Level Index)를 도출
하고 이를 활용할 수 있는 방안에 대하여 제시하였다.
본 논문의 구성은 다음과 같다. 2장에서는 기상조건 과 교통조건의 관계 및 교통 예측 관련 기존문헌을 고찰 하였다. 3장에서는 자료에 대하여 소개하였으며, 4장에 서는 연구 방법론을 제시하였다. 5장에서는 교통류 안전 성을 적용한 방안에 대한 결과를 나타내었으며, 6장에서 는 결론을 제시하였다.
선행연구 고찰 1. 기상과 교통조건
Jeon et al.(2004)는 강우, 강설, 안개 등의 이상기 상은 운전자 시인성 저하에 큰 영향을 미치며, 노면의 미 끄럼 현상이 증대되어 차량의 단독사고와 치사율이 높아 지는 것으로 분석하였다. Kathy et al.(2007)은 드라 이빙 시뮬레이터를 이용하여 안개의 농도(맑음, 보통안개, 짙은 안개 3종류로 구분)에 따른 차량추종 선택에 대한 분석을 실시하였으며, 안개의 농도가 짙어 질수록 차두 거리가 증가하는 것으로 나타났다. Sim et al.(2009) 은 고속도로에서의 다양한 기상요인의 영향정도에 따른 속도변화를 분석하였으며, 교통상황에 영향을 주는 기상 요인으로 날씨, 온도, VD로 나타났다. Jung et al.(2011)는 노면 위 수막 두께에 따라 달라지는 노면 마찰력을 도출 후, 이를 제동거리 산출 시 사용되는 감속 도에 적용하여, 강우량에 따라 달라지는 노면마찰력을 산출하는 방법을 제시하였다. Jung et al.(2013)은 도 로 기상정보 시스템 자료와 검지기 자료를 이용하여 강 우량에 따른 속도 감소 패턴을 분석하고 강우량에 따른 속도 감소량 산출결과를 통해 강우수준을 분류하는 기준 을 제시하였으며, 강우수준별 통행속도 예측 특성을 분 석하였다.
2. 기상과 교통안전
Edwards(1998)는 사고 심각도와 기상상태의 상관 관계에 대한 분석을 수행하였다. 강우, 안개, 강풍의 기 상조건과 정상기상을 비교․분석한 결과, 교통사고와 상 관관계가 가장 높은 기상 조건은 안개로 나타났으며, 안 개 시 사고가 발생할 경우 사고심각도 또한 높게 나타났 다. Kim et al.(2007)는 안개 발생 일수와 교통사고 현황을 분석한 결과, 다른 기상상태에 비하여 안개 낀 날
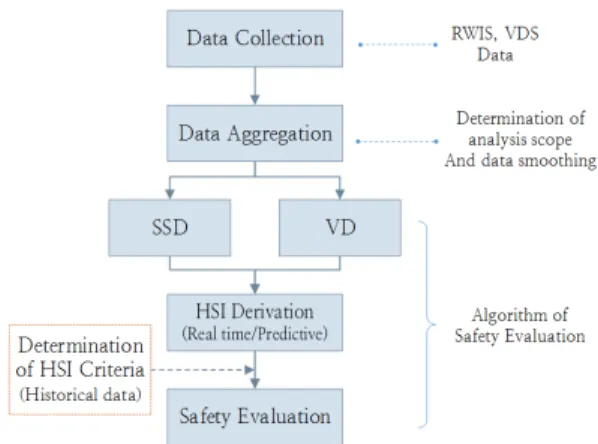
Figure 1. Research framework
Figure 2. Section of analysis
은 사고 건수 대비 사망자 수가 많아 치사율이 높은 것으 로 나타났다. Qiu et al.(2008)은 Meta-Analysis를 이용하여 사고변화율을 분석하였다. 분석결과, 젖은 노 면상태에서 사고 심각도가 300% 증가한다고 하였다.
Kang et al.(2009)는 드라이빙 시뮬레이터를 이용하여 안개농도에 따른 운전자의 반응을 분석하였으며, 운전자 는 안개의 농도가 짙은 경우 운전자는 시인성이 저하되 고 전방차량의 속도변화에 둔감하게 만들어 후미추돌사 고의 위험이 증가하는 것으로 분석하였다. Choi et al.(2012)는 기상 및 교통조건이 고속도로 교통사고 심 각도에 미치는 영향을 분석하였으며, 이상기상 시에는 운전자의 시인성 저하 및 노면마찰력 감소로 인하여 차- 시설사고 및 추돌사고의 건수가 높고, 사고심각도 또한 높게 나타나 것으로 분석되었다.
3. 교통예보 관련
Smith et al.(1997)은 이력자료평균법, 시계열모 형, 신경망모형, KNN 방법을 이용하여 교통량을 예측 한 결과 KNN 방법의 예측 정확도가 높은 것으로 나타 났다. Vanajakshi(2004)는 SVM(Support Vector Machine)을 이용한 예측 통행시간과 실시간 데이터와 과거 통행시간 패턴자료를 이용한 예측 통행시간을 비교 하였다. Tom et al.(2009)는 실시간 통행시간 예측 방 법을 비교․분석하였으며, 그 결과 KNN 방법이 가장 우수한 것으로 분석되었다. Lim(2011)은 KNN 방법, 이력자료평균방법, 가중이동평균방법을 이용하여 향후 20분 동안의 교통량 및 속도를 예측한 결과 KNN 방법
의 예측 정확도가 가장 우수한 것으로 분석되었다. Lim et al.(2013)은 구간검지기 자료를 활용하여 일반국도 를 대상으로 통행시간 예측 방법을 개발하고자 하였다.
그 결과 MAPE 분석에서 모든 도로유형, 교통상태에서 KNN 방법이 우수한 것으로 분석되었다.
4. 기존 연구와의 차별성
기존 연구에서 기상조건과 교통조건의 안전성 관계에 대한 연구가 활발히 이루어지고 있으나, 도로노면에서 실시간으로 수집되는 자료를 이용하여 안전성을 판단하 는 알고리즘 개발에 관한 사례는 부족하다. 또한 통행시 간과 같은 교통정보 예측에 관한 연구도 활발히 진행 중 이지만, 대부분 다양한 예측기법의 성능평가 연구에만 초점이 맞추어져 있다. 이에 본 연구에서는 VD와 SSD 의 관계를 RWIS자료와 VDS자료를 이용하여 분석한 후, 교통류 안전성 판단 알고리즘을 제시하고, 예측정보 를 활용하여 신뢰성 있는 교통류 안전성 정보를 제공하 기 위한 기반을 마련한다는데 기존 연구와 차별성을 가 진다. 연구의 흐름은 Figure 1에 나타내었다.
자료
본 연구에서는 VD와 SSD의 관계 분석을 위한 분석 구간으로 서울-춘천 고속도로의 서종대교로 선정하였다.
자료 수집은 RWIS와 VDS에서 관측 및 검지된 시정거 리 및 속도 자료를 사용하였다. RWIS 자료는 기온, 습 도, 풍속, 풍향 등의 기본 기상정보, 강우상태, 강우강도 등의 강우정보, 노면온도, 노면상태 등의 도로정보, 시거 등이 포함되어 있으며, 검지기는 RWIS와 가장 가까운 서울방향의 하류부 검지기(060VDS01951C0)를 이용
Descriptive Statistics
Mean 436.024 Kurtosis -0.558 S.E. 11.572 Skewness 0.401
Median 443 Range 770
Mode 460.333 Min. 124.333
S.D 196.389 Max. 894.333
Variance 38568.562 30th% 755.333
Sample 288 50th% 216.667
Table 1. Descriptive statistics for VD
(a) Safe Traffic Conditions(VD>SSD)
(b) Unsafe Traffic Conditions(VD≤SSD) VD : Visibility Distance
SSD : Stopping Sight Distance
Figure 5. Conceptual illustration of methodology Figure 3. Decision criteria for data selection
Figure 4. Example of visibility distance profile
하였으며, 속도, 교통량 등의 교통정보가 수집된다.
Figure 2에 분석구간의 RWIS와 검지기의 공간적 배경 을 나타내었다.
1년(2012년) 동안 기록된 기상자료와 차량검지기 자 료를 이용하였으며, 분석대상은 다음과 같은 선정기준을 적용하여 선별하였다. 첫째, 자료의 신뢰도를 위하여 일 일 데이터 중 결측비율이 10%이내인 자료를 선정하였 다. 둘째, 하루 동안 VD가 SSD보다 클 때와 작을 때가 뚜렷하게 나타나는 날을 선정하기 위하여 최소 VD가 100m이상, 최대 VD가 500m이상인 날을 선정하였다.
셋째, VD의 변화가 일정시간동안 연속되어 유지되는 날 을 택하여 분석하였다. 이는 VD와 SSD의 관계분석이 용이한 날을 선정하기 위함이며, Figure 3에 제시한 바 와 같이 분석대상 선정기준을 적용하여 전체 5일을 선정 하였다. Training Data Set은 8월 24일, 8월 29일, 9 월 17일, 9월 21일을 택하여 예측분석 시 적용할 최적 파라미터를 도출하였으며, Test Data Set은 9월 23일을
선택하여 도출한 최적 파라미터를 적용하여 분석을 실시 하였다. Test Data Set(9월 23일)의 VD 변화는 Figure 4와 같으며 기술통계량은 Table 1에 제시하였다.
방법론
1. 개념
본 연구에서는 다음과 기본사항을 전제로 분석을 실시 하였다. 먼저 수집된 RWIS의 시정거리는 실제 운전자의 시정거리와 같으며, 인지반응시간(PRT : Perception Reaction Time)은 연속교통류이므로 2.5초를 적용하 였다. 모든 차량의 성능은 동일하며(타이어 접지 마찰 력, 가감속도 성능 등), 또한 과거 t-n시간부터 현재 t시 간동안 집계된 자료는 현재 t 시간대의 교통상황 및 도 로환경을 대표한다.
Figure 5-(a)와 같이 VD가 SSD보다 긴 경우, 갑 작스런 돌발상황에서 운전자는 전방의 상황을 충분히 인 지하고 정지할 수 있는 시간과 거리를 가지게 되므로 안
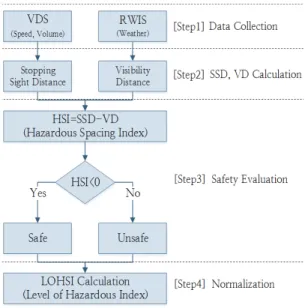
Figure 6. Proposed methodology
전한 교통류 상태라고 할 수 있다. 반면에 Figure 5-(b) 와 같이 VD가 SSD보다 짧을 경우, 갑작스런 돌발상황 발생 시 운전자는 SSD를 확보하지 못하여 사고의 직접 적 원인이 되거나 2차사고 발생 개연성이 커지는데, 이를 불안전한(위험한) 교통류 상태로 정의 할 수 있다. 따라서 VDS에서 수집된 속도자료로 SSD를 산출하고 RWIS 에서 수집된 VD자료를 이용하여 Figure 6에 제시한 알 고리즘에 따라 교통류의 안전성을 판단하게 된다. 이 때, 교통류 안전성을 판단하기 위한 식은 식(1)과 같이
(1)
교통상황
여기서, HSI : Hazardous Spacing Index SSD : Stopping Sight Distance(m) VD : Visibility Distance(m)
정의하였다. 여기에서 SSD는 운전자가 전방의 장애물을 인지하고 위험하다고 판단하여 제동장치를 작동시키기까 지의 주행한 거리(공주거리)와 운전자가 브레이크를 밟기 시작하여 자동차가 정지할 때까지의 거리(제동거리)를 이 용하여 나타낼 수 있으며 식(2)와 같다.
×
(2)
여기서,
SSD : 정지시거(Stopping Sight Distance)(m) V : 차량속도(kph)
tr : 인지반응시간(sec) f : 타이어-노면 마찰계수
s : 경사(m/m, 오르막(+), 내리막(-))
Do(2005)은 공주거리는 운전자 개개인의 경험 및 숙 련 정도, 위기대처능력 등이 다양하기 때문에 운전자가 장애물을 발견한 후 브레이크를 밟을 것인가를 판단하고 나서 브레이크를 밟을 때까지의 동작시간에 대하여 각종 실험이 실시되고 있지만, 그 결과가 매우 다양하다고 교 통공학원론에 제시하고 있다. 본 연구에서는 국토해양부 의 도로설계기준(2012)에 따라 인지반응시간을 2.5초로 하여 주행거리를 산정하였다. 운전자의 반응시간의 범위 는 일정하지는 않지만 보통 0.4-0.7초 정도이나, 혼잡한 도로상황 및 예기치 못한 상황 등을 고려하여 2.5초를 반 응 시간으로 사용할 경우 90% 이상의 운전자가 위기에 대응할 수 있는 적당한 시간으로 판단하고 있다.
제동거리는 운전자가 브레이크를 밟아 자동차를 정지 시킬 때 필요한 거리로 자동차의 브레이크 성능, 포장 종 류 및 노면상태, 타이어 재질 및 상태 등 다양한 조건에 따라 달라진다. 본 연구에서는 VD가 SSD보다 짧아지는 경우가 일반적으로 이상기상(강우, 강설, 안개 등)에서 발생한다는 점을 고려하여, 젖은 노면에서의 마찰계수를 도로설계기준에서 제시하는 값을 적용하였다.
2. 예측기법(KNN)
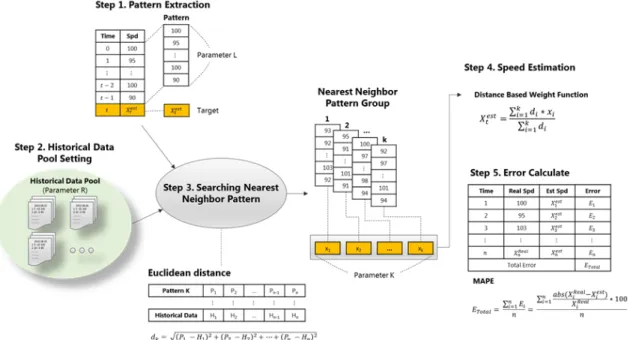
본 연구에서 사용한 예측기법은 분류기법 중 하나로 임의의 점이 어떤 집단에 속하는지 확률적으로 구분하는 최근접이웃 예측기법(KNN : K Nearest Neighbors Method)을 활용하였다. 과거 이력자료의 시간적 변화 패턴을 이용하여 미래의 값을 예측하는 방법으로, 과거 의 이력자료 집합에서 현재 시간대의 패턴과 거리가 가 장 가까운, 즉, 교통상태가 가장 유사한 이웃(Nearest Neighbor)을 탐색하여 미래를 예측하는 방법이다 (Lim, 2011). 본 연구에서 사용한 KNN기법은 다음 단계에 따라 진행된다. 1단계, 하나의 패턴은 몇 개의 데 이터로 구성할 것인가를 결정한다. 2단계, 과거 이력자 료의 분석 범위를 결정한다. 3단계, 현재와 가장 유사한 데이터 패턴 K개를 찾아낸다. 이때 유사한 패턴이란, 패
Figure 7. Procedure for KNN-based prediction
Parameters Description
K number of similar data patterns expressed L the number of uniform time interval of data in a
pattern expressed
R the range of historical data expressed Table 2. KNN parameters
턴간의 거리를 유클리디언 거리 계산법을 이용하여 산출 한 값들 중, 가장 작은 순서로부터 K개의 패턴을 말한 다. 4단계, 거리에 따라 가중치를 계산한 후, 예측 값을 도출한다. 5단계, 실제 값과 예측 값을 비교하여 예측력 을 측정한다. Figure 7에 개념도를 나타내었으며, KNN 예측기법에서 사용되는 대표적인 파라미터들은 Table 2 에 제시하였다.
KNN 예측 시, 각각의 파라미터의 값에 따라 예측 값 이 달라진다. 이는 예측력 즉, 예측 정보의 신뢰성과 연 결되어 있기 때문에, 적정 파라미터 값을 찾는 것 또한 중요한 연구사항이다. 예측력 산정 시 식(3)과 같이 MAPE(Mean Absolute Percentage Error)방법을 사용하였다.
×
× (3)여기서, At : 실제값 Ft : 예측값 n : 관측수
3. 위험도 정규화
본 연구에서는 SSD와 VD를 이용하여 교통류의 위험
도를 수치로 0-1 사이 값으로 정규화하고 이를 LOHSI (Level of Hazardous Spacing Index)로 정의하였다.
이는 교통류 상황에 대한 단순한 이분법적 판단(안전 or 위험)이 아니라, 교통정보센터 운영자 관리자가 위험 상 황의 심각도 수준을 보다 쉽게 이해할 수 있도록 객관적 으로 표현하기 위함이다. 즉, LOHSI를 이용하여 운영 관리자는 교통류 안전성 향상을 효율적이며 능동적인 교 통류 관리가 가능할 것이다.
t시간부터 t+n시간 동안 관측된 자료(예측값)에 의 해 산출된 HSI와 교통량(q)의 곱의 합에서 관측된 HSI 와 교통량(q)의 값 중 최대값(Exposure)으로 나눠주어 0-1 사이 값으로 정규화 하였으며, 산출 식을 식(4)에 나타내었다.
Exposure HazardousSpacingI ndex
××m ax×
×
(4)
Application 1 (Real-Time Based) Application 2 (Prediction Based) Using real-time data(5min aggregation) Using predicted data(KNN)
Expired Traffic information More useful and signifiant information
For traffic monitoring For active traffic management
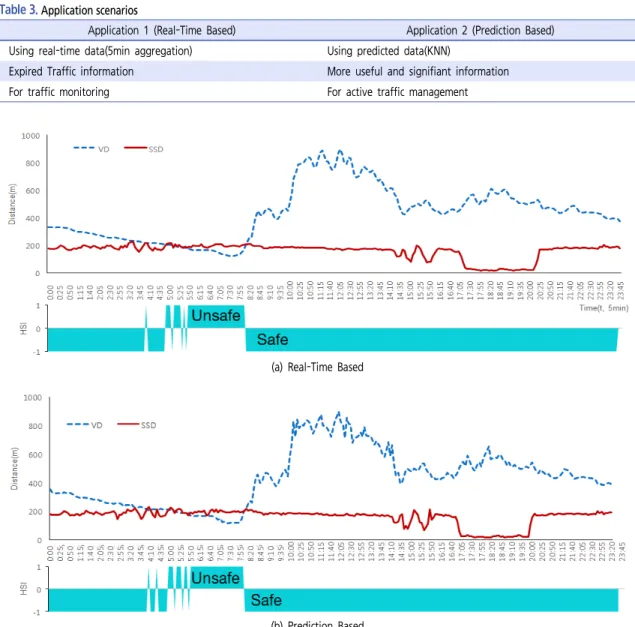
Table 3. Application scenarios
(a) Real-Time Based
(b) Prediction Based Figure 8. Comparison of SSD and VD
여기서,
× : t시간에서 t+a시간 동안 관측
된 자료들에 의해 산출된 HSI 와 교통량(q)의 곱의 합 (단, HSIt>0 의 경우(unsafe)만을 대상으로 함)
×m ax : 관측된 HSI×q의 값 중 최대값,
×m ax
: 분석기간 Step 수
: 차로수
4. 적용방안
본 연구에서는 교통류의 안전성을 판단 기법을 적용 하기 위한 방안으로 다음의 두 가지 적용방안을 Table 3에 제시하였다. 첫 번째 적용방안은 과거 1step이전의 시간(t-1)부터 현재 시간(t)까지 수집된 5분 집계자료 를 이용하는 것이다. 이 방안은 운영관리자 관점에서 이 상기상 발생 시 교통상황 및 안전성 판단 모니터링으로 적용할 수 있을 것으로 판단된다. 두 번째 적용방안은 예 측기법을 적용하여 운영자관리자가 미래 시점(t+n)의 상황을 인지할 수 있도록 지원하는 것이다. 운영관리자
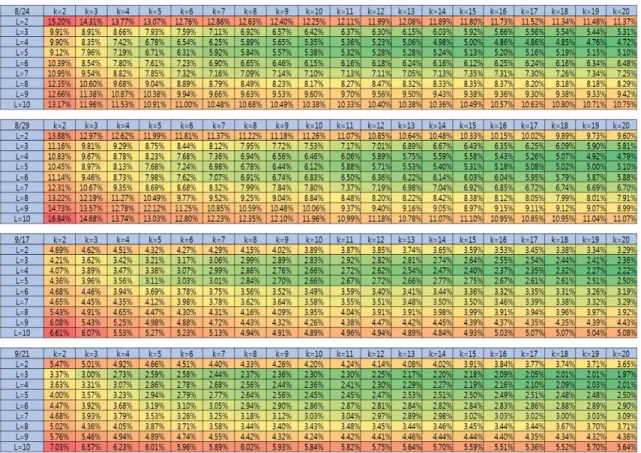
Table 4. Result of parameter analysis of VD prediction (MAPE) 가 안전성 판단 및 운영관리 시, 교통류 안전성 예보 및 사고예방을 위한 능동적 대응이 가능할 것이다. 따라서 예측된 정보의 신뢰성 확보가 전제되어야 유용한 교통 정보로서의 가치가 크게 나타날 것으로 판단된다.
적용결과 1. 교통류 안전성 판단
본 연구에서는 VDS에서 수집되는 속도자료를 이용하 여 산출한 SSD와 RWIS에서 수집되는 VD를 이용하여 교통류 안전성을 평가한 두 가지 적용 안을 제시하였다.
먼저 현재자료기반의 적용 안은 Figure 8-(a)와 같으며 SSD가 VD보다 길어질 때 위험한 상황으로 판단하였다.
현재기반의 VDS와 RWIS에서 수집되는 자료는 실시간 기반 자료를 사용하지만 가공․처리과정을 거쳐 운전자 에게 정보가 제공되는 시점에서는 이미 지나간 과거의 정보로써 정보의 정시성 의미가 떨어지는 단점을 가지고 있다. 따라서 예측기반의 적용 안이 이용자에게는 정보
로써의 가치가 있다고 말할 수 있다. 그러나 예측 기반의 정보는 예측 기법에 따라 예측된 자료의 신뢰성 확보가 전 제되어야만 정보로써의 의미를 가질 수 있다고 판단된다.
본 연구에서는 예측기법으로는 KNN방법을 사용하여 t+1(5분)시간대 예측 분석을 실시하였다. 과거 이력 자료 분석범위 R은 1년 자료(2012년)를 이용하였다. Training Data Set(2012년 8월 24일, 8월 29일, 9월 17일, 9월 21일)의 RWIS자료인 VD를 이용하여 K값과 L값에 대한 최적 파라미터를 분석하였다. 그 결과, L값은 3-6사이, 그리고 K값은 증가할수록 예측력이 높아지는 경향을 보였다.
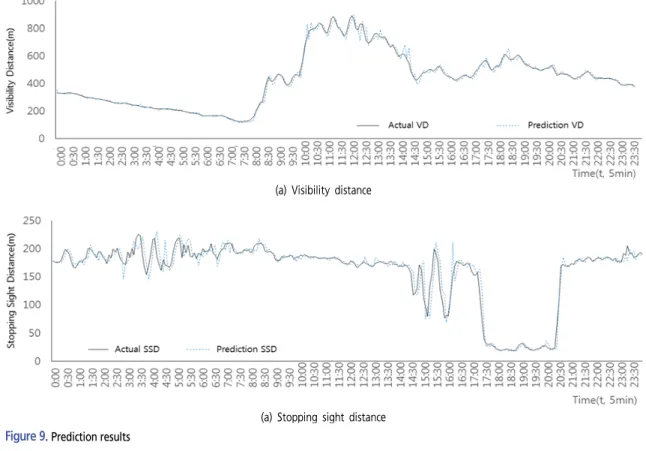
각 파라미터 값의 변화에 따른 시정거리 예측력 변화 결과 는 Table 4에 제시하였다. 예측력의 변화본 연구에서 는 L=3, K=10(K:유사한 패턴 개수, L:하나의 패턴의 구성하는 자료의 수)을 최적 파라미터로 선정하여 Test Data Set(9월 23일)에 적용하여 분석하였으며, VD와 SSD를 예측한 결과는 Figure 9에 제시하였다. 예측력 (MAPE)은 VD가 3.26%, SSD가 6.61%로 상당히 높은 결과를 보였다. 이러한 예측 결과를 바탕으로 교통류의 안전성 판단을 한 결과를 Figure 8-(b)에 나타내었다.
(a) Visibility distance
(a) Stopping sight distance Figure 9. Prediction results
Figure 10. LOHSI profile
2. LOHSI 산출
본 연구에서는 VD와 SSD를 이용하여 교통류 안전성 을 판단하는 ‘안전하다’ 또는 ‘위험하다’ 라는 단순한 이분 법적 판단이 아니라 운전자에게 위험도 상황에 대해 ‘얼 마나 위험한가’ 라는 부분에 있어서, 이해도 증진과 각 도로의 구간별 위험도 정보의 객관성을 위하여 HSI를 이용하여 교통류 위험도를 0-1 사이 값으로 정규화하여 LOHSI(Level of Hazardous Spacing Index)로 정 의하였다. 그 결과는 Figure 10과 같이 나타낼 수 있다.
약 7:30분에 SSD와 VD의 차이가 최대이지만, 약 8시 에 LOHSI가 최대값을 가지는 결과를 보였다. SSD, VD의 차이와 교통량이 LOHSI에 미치는 영향력에 대해 서는 Figure 11에 제시하였다. Figure 11의 구간 2-ⓐ
에서 SSD와 VD의 차이가 커지면서 LOHSI가 증가함 을 보인다. 구간 2-ⓑ에서 SSD와 VD의 차이의 변화가 크지 않지만 LOHSI가 증가함을 보이는데, 이것은 구간 3-ⓑ에서와 같이 교통량이 증가했기 때문이다. 따라서
동일한 위험조건1)에서는 교통량이 많을수록 교통사고의 위험이 커진다고 할 수 있다. 예를 들어, 동일 구간에서 동일한 위험조건일 때, 차량이 5대 있을 경우보다 10대 있을 경우, 연쇄추돌 확률이 높아지기 때문에 더욱 위험 하다고 할 수 있다.
1) 동일한 VD, SSD 조건
Figure 11. SSD-VD, volume and LOHSI profile
결론 및 향후연구
본 연구는 VDS에서 수집되는 속도 자료를 이용하여 산출된 정지시거와 RWIS에서 수집되는 VD의 관계를 분석하여 교통류 안전성을 판단하는 알고리즘을 제시하 였으며, 운전자에게 사고예방을 위한 능동적 대응이 가 능하도록 하는 유용한 정보를 제공하기 위해 최근접이웃 예측기법(K Nearest Neighbors Method)을 사용하였 다. 또한, 교통류 안전성의 객관적인 비교․분석을 위하 여 정규화 과정을 거쳐 안전성 지표(Safety Level Index)의 기준을 제시하였다.
특히, 예측기반의 정보를 활용하는 적용방안 2의 경 우, 예측된 자료의 신뢰성 확보를 위하 다양한 파라메터 들을 적용하여 분석을 실시하였다. 그 결과, 파라메터 L=3, K=10(L:하나의 패턴의 구성하는 자료의 수, K:유사한 패턴 개수)으로 적용하였다. K는 커질수록 예 측력이 우수한 것으로 나타났으나, 유사패턴의 개수가 많아질수록 계산이 복잡지고 산출시간이 오래 걸리는 점 을 고려하여 K=10으로 적용하였다. 또한 이용자에게 위험도 상황에 대한 이해도 증진을 위하여 교통류 위험 도를 0-1 사이 값으로 정규화하여 LOHSI(Level of
Hazardous Spacing Index)로 정의하였으며, 분석결 과, LOHSI의 변화는 SSD와 VD의 차이가 클수록 교통 량이 증가할수록 LOHSI값이 더욱 크게 나타났다.
본 연구결과를 활용할 경우, 이용자 관점에서는 교통 류의 안전성 향상을 위한 효율적인 교통운영을 지원 할 수 있을 것으로 기대된다. 특히, 적용방안 2의 경우, 기상 조건 및 도로조건에 따른 가변제한속도를 적용하는 등, 능동적 교통류 관리(Active Traffic Management) 관 점에서 보다 효과적일 것으로 기대되다. 그러나, 본 연구 를 발전시키기 위해서는 다음과 같은 사항에 대한 추가 연구가 필요하다. 첫째, 본 연구에서는 시정거리와 정지 시거만을 고려하였다. 그러나 실제 이상기상에서 교통류 안전성을 판단하기 위해서는 운전자특성, 교통상황, 도 로조건, 기상환경 등 다양한 조건이 고려되어야한다. 특 히 교통량의 경우, 차두시간과 관련성이 크기 때문에 이 에 대한 분석이 필요하다. 둘째, 인지반응 시간을 2.5초 로 적용하였다. 그러나 일반적인 교통상황에서는 인지반 응시간이 보다 짧게 나타날 수 있다. 따라서 실제 알고리 즘의 현장 적용 시, 다양한 범위의 인지반응시간을 사용 하면서 위험도 판단 결과와 교통사고와의 관계를 장기적 으로 모니터링 할 필요가 있다. 셋째, KNN 예측기법에 사용된 파라미터는 특정 날에 대한 오류 최소화 값이 사 용되었다. 일반적으로 KNN 방법의 경우 과거 데이터가 충분할 경우 K=1인 경우에 에러가 최소화되거나, 또는 K 값이 특정 값 근처로 에러가 최소화되는 경향이 있다.
본 연구에서 K값이 증가할수록 예측력이 높아진다는 결 과는 과거 데이터가 부족하여, KNN 방법으로는 충분히 예측할 수 없는 상태임을 나타낼 수 도 있다고 판단된다.
따라서 보다 객관적인 파라미터 값을 도출하기 위하여 데이터를 보완하여 연구가 필요하다. 마지막으로, LOHSI의 기준 설정이 필요하다. 현재는 0-1사이 값으 로 정규화하여 분석하는데 그쳤는데, 실제 교통사고 자 료와 매칭을 통하여 정규화된 LOHSI 값들이 의미하는 위험도 정도에 대한 분석과 효과 검증이 필요하다.
ACKNOWLEDGEMENT
This research was supported by a grant (12transportation system-intelligence01) from Transportation & Logistics Research Program funded by Ministry of Land, Infrastructure and Transport Affairs of Korean Government.
REFERENCES
Andery J., Mills B., Leahy M., Suggett J. (2003), Weather as a Chronic Hazard for Road Transportation in Canadian Cities, Natural hazards, 28(2-3), 319-343.
Broughton K. L. M., Switzer F., Scott D. (2007), Car following decisions under three visibility conditions and tow speed tested with a driving simulator, Accident Analysis and Prevention 39(1), 106-116.
Choi S., Lee G. Y., Oh C., Kim D. G. (2012), Effects of weather and traffic conditions on accident severity on freeways , The Joural of Korean Society of Civil Engineers, 33(3), 1105-1113.
Do C. W. (2005), Principle of Transportation Engineering.
Edwards J. B. (1998), The Relationship Between Road Accident Severity and Recorded Weather, Journal of Safety Research, 29(4).
FHWA (2000), Highway Capacity Manual
Garber N. J., Gadiraju R. (1989), Factors Affecting Speed Variance and its Influence on Accidents, TRR, 1213, 64.
Jeon W. H., Cho H. J. (2004), Revised Guideline for Roadside Safety Facilities on Adverse Weather, Proceeding of Korean Society of Road Engineers, 429-434.
Jeong E. B., Oh C., Hong S. M. (2013), Prediction of Speed by Rain Intensity using Road Weather Information System and Vehicle Detection System data, The Journal of The Korea Institute of Intelligent Transport Systems, 12(4), 44-55.
Jung S.y., Qin X., Noyce D. A. (2011), Modeling Highway Safety and Simulation in Rainy Weather, TRB, 2237, 134-143.
Kang J. J., Ni R., Andersen G. J. (2008), The effects of reduced visibility from fog on car following performance, TRR, 2069, TRB, 9-15
Kim J. M., Lee S. G. (2007), The Study of Guide System about Vehicle Speed and Gap in Fog, The 56th Conference of Korean Society of Transportation, Korean Society of Transportation,
451-455.
Lee H. Y., Choi J. S. (2006), A Study on Safety Improvement of Highway Design in A High Frequency Fogging Area, Proceeding of Korean Society of Road Engineers, 301-306.
Lim S. H. (2011), Travel Time Prediction Simultaneously using Point and Interval Detector Data, University of Seoul.
Lim S. H., Lee H. M., Park S. L., Heo T. Y. (2013), A Study of Travel Time Prediction using K-Nearest Neighborhood Method, The Korean Journal of Applied Statistics, 26(5), 835-845.
Ministry of Land, Transport and Maritime Affairs (2012), Fundamentals of Road Design.
Shim S. W., Choi K. C. (2009), Classification of Freeway Traffic Condition by the Impacts of Road Weather Factors, The Journal of Korea Society of Civil Engineers, 29(6), 685-691.
Smith B. L., Demetsky M. J. (1997), Traffic flow forecasting: Comparison of modeling approaches, Journal of Transportation Engineering ASCE, 123, 261–266.
Tam M. L., Lam W. H. K. (2009), Short-term Travel Time Prediction for Congested Urban Road Networks, Transportation Research Board 88th Annual Meeting 2009 Paper 9–2313.
Vanajaskshi L. (2004), Travel Time Prediction Using Support Vector Machine Technique, Texas A&M University College Station.
♧ 주 작 성 자 : 박현진
♧ 교 신 저 자 : 오철
♧ 논문투고일 : 2014. 6. 24
♧ 논문심사일 : 2014. 8. 6 (1차) 2014. 9. 26 (2차) 2014. 10. 3 (3차)
♧ 심사판정일 : 2014. 10. 3
♧ 반론접수기한 : 2015. 2. 28
♧ 3인 익명 심사필
♧ 1인 abstract 교정필