선박의 저항 및 자항성능 해석을 위한 수치기법 개발
김 진1․ 박일룡2,†․ 김광수1․ 반석호1․ 김유철1 한국해양연구원 해양시스템안전연구소1 동의대학교 조선해양공학과2
Development of a Numerical Method for the Evaluation of Ship Resistance and Self-Propulsion Performances
Jin Kim
1․ Il-Ryong Park
2,†․ Kwang-Soo Kim
1․ Suak-Ho Van
1․ Yoo-Chul Kim
1Maritime and Ocean Engineering Research Institute, KORDI
1Department of Naval Architecture and Ocean Engineering, Dongeui University
2Abstract
A RANS(Reynolds averaged Navier-Stokes) based numerical method is developed for the evaluation of ship resistance and self-propulsion performances. In the usability aspect of CFD for the hull form design, the field grid around practical hull forms is generated by solving a grid Poisson equation based on the hull surface grid generated from station offsets and centerline profile. A body force technique is introduced to model the effects of the propeller in which the propeller loads are obtained from potential flow analysis using an unsteady lifting surface method. The free surface is captured by using a two-phase level-set method and the realizable k-ɛ model is used for turbulence closure. The hull attitude in vertical plane, i.e., trim and sinkage, is calculated by using a quasi-steady method and then considered in the computation by translating and rotating the grid system according to the values. For the validation of the proposed method, the numerical results of resistance tests for KCS, KLNG, and KVLCC1 and of self-propulsion test for KCS are compared with experimental data.
Keywords : CFD(전산유체역학), Resistance performance(저항성능), Self-propulsion performance(자항성능), Grid generation(격자생성), Hull attitude(선체자세), Validation(검증)
1. 서 론
선형의 수정과 설계된 선형에 대한 유체성능 확인 과정은 일 반 상선의 선형설계 단계에서 빈번히 이루어지는 작업이다. 최 근 유체성능 검증 과정에서 시간과 비용의 측면에서 모형시험의 횟수를 줄이면서 CFD(Computational Fluid Dynamics)기법을 활발히 활용하고 있다(Kim et al., 2007a; Kim et al., 2008;
Park et al., 2008; Park et al., 2009; Seo et al., 2009; Yang et al., 2010). 한국해양연구원 해양시스템안전연구소, MOERI 에서 개발한 WAVIS (Wave and VIscous flow analysis System for hull form development) 1 버전은 최종 선형이 결정되기까지 요구되는 빈번한 저항성능 평가를 용이하도록 한 수치계산 수행 능력에 초점을 두고 있다. WAVIS의 경우 격자계 생성 작업에 익숙하지 않은 사용자라도 주어진 기본 오프셋(offset)으로부터 선박 주위 유동 해석에 필요한 선체 표면격자 및 공간격자를 PC에서 몇 분 안에 생성할 수 있는 알고리즘을 제공하고 있다 (Kim & Van 1999; Kim et al., 1999). 유동 해석법으로는 선수 선형 저항성능 개선에 필요한 파형분석을 위한 포텐셜유동 해석
법과 추진기 설계와 관련하여 반류(wake) 및 압력분포 분석으로 선미 선형을 개선하기 위한 난류 점성유동 해석법을 각각 도입 하고 있다. 이들 유동 해석법들의 경우도 격자 생성법과 마찬가 지로 PC에서 비교적 짧은 시간 내 해를 제공한다는 장점을 가 진다. 반면 실제 모형시험 조건인 선체의 자세변화를 고려한 점 성 자유수면 유동 해석과 프로펠러 영향을 고려해야 하는 자항 성능 해석은 수행할 수 없다. 최근 설계된 선형들에 대한 보다 정확한 유동정보와 유체성능 우열을 보다 확실하게 결정지을 수 있는 실제 모형시험 조건과 동일한 저항 및 자항시험 수치 시뮬 레이션에 대한 관심이 커지고 있다. 이와 관련하여 수행되고 있 는 연구들을 소개하면 다음과 같다: Kim et al.(2005), Kim et al.(2007b), Kim et al.(2009), and Choi et al.(2010). 상기 요 구에 대응하여 한국해양연구원 MOERI는 기존 WAVIS 1 버전의 사용자 편의성이 고려된 격자 생성 방법을 도입하고 점성 자유 수면 유동을 해석하면서 선체의 자세변화와 자항성능 계산이 가 능한 새로운 WAVIS 2 버전을 개발하였다.
본 논문은 선박의 저항 및 자항성능 해석을 위해 자유수면을 포함한 선체 주위 난류유동 해석법을 기반으로 MOERI에서 개발
된 WAVIS 2 버전에 도입된 수치기법과 그 검증 내용을 소개하고 있다. WAVIS 2 버전은 기존 1 버전이 가진 강점을 확장하여 기 본 오프셋으로부터 자유수면 유동 해석에 필요한 공간 격자계를 쉽게 생성할 수 있도록 개발되었다. 또한 선체의 자세변화인 트 림(trim)과 침하(sinkage)량을 두 가지 접근법으로 구할 수 있도록 하였다. 자항성능 해석에 필요한 프로펠러 영향은 포텐셜유동 기 반의 양력면이론(Lifting Surface Theory, LST)으로 작성된 프로 그램과 WAVIS의 점성유동 해석법을 연동하는 방식으로 고려된 다. 여기서, 기존에는 사용자에 의해 수동으로 수행되던 상기 연 동 해석 과정을 해 탐색 알고리즘을 도입하여 자동화 시켰다. 개 발된 본 수치기법을 검증하기 위해 KCS, KLNG, KVLCC1 세 선 형의 저항시험과 KCS선형의 자항시험에 대한 수치 시뮬레이션을 수행하고 그 결과를 각각의 모형시험 결과와 비교하였다.
2. 수치해석 방법
2.1 지배방정식
자유수면과 함께 선박 주위 점성유동 해석에 도입된 좌표계는 선체의 진행방향과 반대방향을 x, 중력과 반대방향인 연직 상방 향을 z,그리고 우현을 양의 값으로 취하는 y의 직교 Cartesian 좌 표계이다. 좌표계의 원점은 선체 중심면(center plane)과 중앙면 (midship), 그리고 정수면(calm free surface)이 만나는 점에 있다.
공기와 물을 모두 포함하는 비압축성 난류 유동에 대한 지배방정 식인 연속방정식과 표면장력의 영향을 제외한 RANS(Reynolds averaged Navier-Stokes)방정식의 적분형태는 다음과 같다.
(1)
(1)
(2)
여기서 는 S의 경계면을 가지는 검사체적(control volume)이 며, ni는 단위 법선벡터 (nx, ny, nz)를 나타낸다. ρ는 유체밀도이 며, ui는 각 좌표축 방향의 유체속도 성분 (u, v, w)을 나타낸다.
τij는 점성과 난류에 의한 유효응력이며, p는 압력을 나타낸다. 그 리고 bi는 각 좌표 축 xi방향의 단위 질량당 체적력을 나타낸다.
지배방정식의 모든 변수는 선속 U, 선체 길이 Lpp, 그리고 물의 밀도로 무차원화되었다.
상기 서술한 지배방정식을 풀기 위한 수치해석법으로 유한체 적법(finite volume method)을 사용하였다. 1차 정도의 암시적 (implicit) Euler법(Ferziger & Perić 1996)을 이용하여 시간적분을 수행하였으며, 지배방정식의 대류항과 확산항은 3차 정도의 MUSCL(Monotonic Upstream centered Scheme for Convection Laws, van Leer 1979)법과 2차 정도의 중앙차분법(central difference
scheme)을 이용하여 각각 이산화하였다. 연속방정식을 만족시키 기 위한 속도-압력의 연성은 SIMPLE(Ferziger & Perić 1996)알 고리즘을 통해 수행되었다. 본 논문에서 지면상 제한으로 언급 하지 못하는 상세한 수치 이산화기법은 Kim et al.(2000), Kim et. al.(2002), 그리고 Ferziger & Perić(1996)의 문헌에 자세 히 수록되어 있다.
2.2 난류 모델링
지배방정식 (2)에 포함된 유효응력 τij는 Boussinesq의 등와점 성모델(isotropic eddy viscosity model)을 사용하여 다음과 같이 나타낼 수 있다.
(3)
여기서 δij는 Kronecker's delta를 나타내고, k는 난류의 운동에 너지 그리고 μe는 난류 와점성계수(turbulent eddy viscosity) μt와 유체의 점성계수 μ를 합한 유효점성계수(effective viscosity)를 나 타낸다. 난류 와점성계수 μt 를 계산하기 위해 realizable k-ε 난 류모델(Shih et al., 1995)과 Launder & Spalding(1974)의 벽함 수(wall function)기법을 사용하였다.
2.3 자유수면 모델링
선체 주위 자유수면 변화를 해석하기 위해 Sussman et al.(1997)이 제안한 LS(Level-Set)법을 도입하였다. LS함수 이송 방정식(advection equation)에 대한 이산화 방법은 유한체적법을 이용한 지배방정식의 시간적분 및 대류항에 대한 이산화 방법과 동일하다(Park et al., 2004).
2.4 수치격자계 생성
본 논문에서 소개하는 WAVIS 2 버전은 기존 1버전이 도 입하는 방식과 동일한 선박의 기본 오프셋을 바탕으로 하여 선체 표면 및 공간 격자계를 짧은 시간에 만들 수 있는 기법 을 사용한다. 이 방법은 별도의 격자 생성 프로그램을 이용 할 때 소비되는 노력과 시간을 상당히 감소시킬 수 있고, 숙 련도에 의존된 격자 품질 변화를 감소시킬 수 있는 장점이 있다(Kim & Van 1999). 본 논문이 도입하는 선체에 대한 수치 격자계를 만드는 절차와 기법은 앞선 두 논문(Kim &
Van 1999; Kim et al., 1999)에 자세하게 소개되어 있다.
본 논문은 이에 대한 간단한 정리와 함께 기존 WAVIS 버전 이 지원하지 못했던 점성유동 해석에 필요한 자유수면과 선 체의 자세변화를 고려한 공간 격자계 생성법을 자세하게 기 술하고자 한다.
2.4.1 조밀한 오프셋 생성
주어진 기본 오프셋은 선체 표면 격자 생성에 적합한 조밀한 (fine) 오프셋을 만들기 위한 입력 파일로 변환된다. 기본 오프셋 은 퍼거슨 기본함수(Ferguson basis function)를 이용한 구간별 허미트 내삽법(piecewise Hermite interpolation)(Kim & Van 1999)을 통해 충분히 많은 점들로 구성된 선박의 횡단면(body plan)과 선수-선미 윤곽선(hull profile)을 생성하는데 이용된다.
다음으로 임의의 높이에서 수선(waterline)을 구한 후, 주어진 선 체의 종방향 임의 위치의 각 수선 높이에서 구한 반폭들을 이용 하여 새로운 스테이션(station)에서의 오프셋을 생성한다. 이는 형상 변화가 큰 선수부와 선미부의 선형을 정확히 표현하고, 선 체 표면 격자를 매끄럽게 하기위해 새로운 스테이션들을 사용하 여 조밀한 오프셋을 만드는 작업이다.
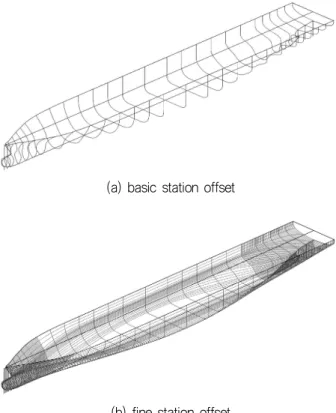
Fig. 1은 상기 설명한 작업을 통해 생성된 KCS선형에 대한 조 밀한 스테이션의 오프셋을 기본 오프셋과 비교하여 보여주고 있 다. 참고로 조밀한 오프셋 생성은 다양한 선형 설계용 CAD프로 그램에서도 제공될 수 있다.
(a) basic station offset
(b) fine station offset
Fig. 1 Initial basic offset(a) and fine offset with waterlines(b)
2.4.2 선체 표면 격자계 생성
선수부와 선미부의 새로 생성된 조밀한 스테이션을 포함하 여 배의 전체 구간에 걸쳐 충분히 많은 점들로 구성된 각 스 테이션에서 선저부의 중심선부터 정해진 수선까지의 점들만을 구하여 선체를 표현하는 기본 바탕 곡면을 이룬다. 그리고 횡
방향 격자계 분포 함수를 결정하고, 각 스테이션에서 단면 곡선 의 길이를 구하여 격자계의 횡방향 길이 분포에 해당되는 점들을 결정한다. 이때 격자 분포 함수의 기본형을 등비급수로 하고 횡 방향 양 끝단으로의 격자 밀집도를 임의의 비(ratio)를 입력하여 변경하도록 하였다.
각 스테이션 위에 격자계의 횡방향 분포에 해당되는 점들이 결정되면, 동일한 분포에 해당되는 점들을 종방향으로 연결하 여 격자선을 구할 수 있다. 이렇게 얻어진 격자선 위에 종방향 길이 분포 함수를 따르는 점들이 구해지고 그 점들을 연결하면 원하는 격자계가 완성된다. 종방향 격자 분포 함수로 횡방향과 동일한 등비급수를 이용하였으며, 특히 선수와 선미부 끝단으 로의 종방향 격자 조밀도를 조정하도록 하였다.
WAVIS의 경우 고정된 격자계를 바탕으로 하는 이상유동 (two-phase flow) 해석기법의 일종인 LS법을 사용하여 자유 수면의 움직임을 계산하기 때문에, 자유수면 근처로 잘 집중 된 그리고 가능한 일정한 두께가 유지되는 격자층이 필요하 다. 이를 위해 정수 중 자유수면의 위치를 기준으로 주어진 속도에서 설계된 선형이 만들 수 있는 최대 파고의 높이를 예 상하고 이 높이를 기준으로 일정 두께의 격자층을 만든다. 이 때 격자층내 격자의 밀집도를 조절할 수 있도록 앞서 사용한 등비급수 함수를 수정하여 사용하였다. 선박의 길이를 무차 원화하여 단위길이로 하였을 때 자유수면을 둘러싸는 격자층 내 격자 간격이 10-3정도이면 실제 선형설계 단계에 요구되 는 자유수면 유동에 대한 적절한 정확도의 해석결과를 얻을 수 있다.
Fig. 2는 상기 설명한 과정으로 KCS선형에 대해 생성한 표면 격자계(180×80; 길이방향×둘레방향) 예를 보여주고 있다.
(a) fore body
(b) after body Fig. 2 Hull surface grid
2.4.3 공간 격자계 생성
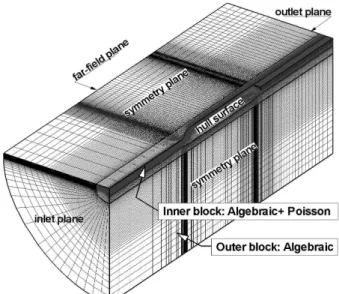
Fig. 3에 보인 바와 같이 점성 자유수면 유동해석을 위해 WAVIS는 O-H형 격자계를 도입하고 있다. 공간 격자계의 경계 면은 선수 상류의 유입면(upstream inlet-plane), 그리고 선미 하류의 유출면(downstream outlet-plane), 바닥 중앙면(keel centerplane), 정수면(calm free surface) 위쪽 공기 영역에 위치 한 상부면(upper plane), 선체 표면(hull surface)을 포함한 대칭 면(symmetry plane), 그리고 바깥면(far-field plane)으로 구성된 다. 모든 경계면은 기본적으로 TFI(Trans-Finite Interpolation)법 (Kim et al., 1999)을 적용하여 대수학적으로 생성된다. 선체와 인접하는 면의 경우 선체에 접하는 격자의 간격과 격자선이 이 루는 각도 기반의 Sorenson(1980) 방법의 격자계 조절 함수를 사용하는 2차원 Poisson방정식과 TFI기법을 혼용하여 격자의 집중도 및 직교성을 유지하도록 하였다. 실제 이 방법은 3차원 공간 격자점들을 구성하는 데도 동일하게 확장되어 적용된다.
상세한 수치해석 전개와 설명은 Kim et al.(1999)의 문헌에서 찾을 수 있다.
선체 표면 격자계 생성에서 설명하였듯이 자유수면 움직임 을 적절하게 해석하기 위해서는 자유수면을 감싸는 균일한 간 격의 격자층이 필요하다. 문제는 선체에 근접된 영역에서 선체 의 형상변화와 난류 경계층을 잘 해상할 수 있도록 격자의 조 밀도와 직교성을 유지해야 하며, 또한 자유수면을 위한 균일한 격자층의 특성이 크게 흐트러지지 않는 공간 격자계를 만들어 내는 것이다.
이를 구현하기 위해 본 논문에서는 공간 격자계를 선체근 방의 내부 블록(inner block)과 선체의 형상 변화 영향이 작은 외부 블록(outer block)으로 나누고, 각 블록의 지배적인 유 동 특성에 맞는 공간 격자계를 생성하였다. 외부 블록의 경우 선체 표면에서 발달된 난류 경계층의 밖에 위치하고 선체 곡 률의 영향에서 벗어나 있다. 이 영역에서는 주로 선체에서 유 기된 파가 선체의 횡방향 및 하류로 전달되는 현상이 주로 발 생하기 때문에 자유수면을 감싸는 균일한 격자층만 잘 생성 하면 된다. 이 때 격자는 3차원 Poisson방정식을 풀 필요 없 이 대수학적인 방법으로 간단하게 생성된다. 내부블록의 경 우 공간 내 격자점들이 선체 곡률 영향과 자유수면을 위한 균 일한 격자층 특성을 유지해야 하기 때문에 다음과 같은 절차 로 생성된다.
(1) TFI법 기반의 대수학적 방법으로 초기 공간 격자점들을 생성한다.
(2) Thomas & Middlecoff(1980) 방법의 격자 조절함수를 이용한 3차원 Poisson방정식을 풀어 초기 격자계의 자유수면 격자층의 흐트러짐 현상을 감소시키면서 일차적으로 선체 곡 률 특성이 반영된 x, y, z방향으로 새롭게 업데이트된 격자계 를 생성한다.
(3) 생성된 격자계의 선체 종방향을 따라 선체에 접하는 모 든 2차원 단면내 각 격자점들의 x좌표는 업데이트하지 않고,
선체 법선 방향의 격자 조밀도를 향상시키기 위해 자유수면 격 자층의 흐트러짐 현상이 크지 않은 Thomas-Middlecoff법 기 반의 격자 조절함수를 사용하여 2차원 Poisson방정식을 풀고 새로운 y와 z좌표값을 구한다.
(4) 다시 동일한 2차원 단면들내 난류 경계층이 발달되는 선 체에 근접한 일부영역에 대해 선체 형상 변화가 잘 반영되고 선 체 법선 방향의 각 격자 직교성을 높이기 위해 Sorenson방법의 격자계 조절함수를 사용하는 2차원 Poisson방정식을 풀어 최종 y와 z 좌표값을 업데이트 한다.
Fig. 3 Grid topology and boundary surfaces
Fig. 4 Schematic view of the process of field grid generation
Fig. 4는 (2), (3), (4)의 과정을 실제 생성된 격자 단면을 들어 설명하고 있다.
Fig. 5는 KCS선형에 대해 생성된 공간 격자계 내부를 보여주 고 있다. 선수부, 중앙 횡단면 및 선미부의 형상이 복잡한 주요 단면들에서 선체에 근접한 영역과 자유수면과 연결되는 영역들에 서 본 방법의 격자 품질을 볼 수 있다.
Fig. 5. Inner grids generated at several longitudinal locations
2.5 선박의 자세변화 계산
선박이 항주하는 상태에서는 트림과 침하의 변화가 일어난다.
트림 계산에 필요한 선체에 작용하는 종동요 모우멘트(pitching moment) 계수는 다음과 같이 계산된다.
′
′ ′ ′
′(4)
여기서 NB는 선체 표면 격자 요소수, Cpi는 압력계수, S'wi는 i번째 격자요소에서의 침수표면적, nx와 nz는 선체 표면에서의 x 및 z방향의 법선벡터 성분, 그리고 xci' 와 zci' 는 i번째 격자요 소의 계산점, x'F 는 선체 수선면(waterplane)에 대한 도심의 x좌 표를 의미한다. 본 계산에서 점성으로 인한 전단력의 영향은 미 소하다고 가정하고 무시하였다. 모우멘트 계수가 구해지면 트림 각은 아래와 같은 식으로 구할 수 있다.
′
′
′
′
(5)
여기서 IL' 은 수선면의 도심, x'F 에 대한 2차 모우멘트이며, Fn은 Froude수를 나타낸다. 선체 침하량을 계산하기 위한 선체 에 작용하는 z방향의 힘은 다음과 같이 계산된다.
′
′
(6)z방향의 힘이 계산되면 x'F 에서의 침하량은 다음의 식과 같이 계산된다.
′
′
′
(7)
여기에서 Aw는 수선면적이다. 이상의 계산을 통해 θ, zs' 이 구해지면 선체 중심에서의 침하량, zso' 와 선수, 선미에서의 침 하량 zsFP', zsAP'를 각각 다음과 같이 구할 수 있다.
′
′
′
′
′
′
′
(8)
개발된 WAVIS 2 버전은 구해진 zso', θ 만큼 선체 표면 격자 를 이동시키고 회전시킨 후 새로운 공간 격자계를 생성하거나 (method-1), 자세변화 없이 생성한 공간 격자계 전체를 주어진 트림과 침하량에 따라 움직이는 방법(method-2)을 통해 자세변 화를 계산할 수 있다. 두 방법에 대한 결과는 다음 장 수치해석 결과에 비교되어 있다. 수렴된 선박의 자세변화를 얻기 위한 반 복계산은 zso', θ 가 변하지 않을 때까지 매 시간 수행되어야 하 지만, 실질적으로 한 저항성능 계산에서 4~5번 정도의 자세변화 계산이면 적절한 수렴 결과를 얻을 수 있다.
2.6 프로펠러 모델링
자항성능 수치해석에 필요한 프로펠러 영향을 고려하기 위해 격 자 모델링을 통한 직접적인 점성유동 해석은 피하고 양력면이론 (LST)으로 작성된 별도의 포텐셜유동 해석 프로그램(Kerwin & Lee 1987)과 연동하는 방식을 취하였다. 점성유동 해석에서 프로펠러는 선체 주위 점성유동 해석결과에서 얻은 유효반류(effective wake)를 유입조건으로 사용하는 상기 포텐셜유동 해석프로그램에서 제공하는 프로펠러 하중을 체적력(body force) 분포로 변환하고, 이를 선미 격 자의 프로펠러 작용 영역 안에 분포하는 방식으로 모델링될 수 있다.
Fig. 6(a)는 다음 장, 수치해석 결과에서 프로펠러 유동 해석 에 이용된 KCS선형의 허브를 포함한 KP505프로펠러의 표면 격 자분포를 보여주고 있다. Fig. 6(b)는 선체 표면격자 일부와 프로 펠러 유동에서 얻어진 하중이 분포되는 추진기가 작용하는 영역 안의 격자점들을 보여주고 있다.
(a) (b)
Fig. 6 Lifting surface panels(a) and field grid points in the propulsion region(b)
2.7 자항해석 알고리즘
수치해석을 이용한 선박의 자항해석 절차는 선형시험수조에서 이루어지는 실제 자항성능 추정을 위한 모형시험과 비슷하다. 설 계된 선형에 대한 자항점을 예측하기 위해서 1978년 ITTC에 의 한 추력일치(thrust identity) 알고리즘을 이용하였다. 이는 선체 저항에서 설계속도에서 모형선과 실선사이의 마찰력 차이를 보상 하는 FD값을 추정한 후 그 외 부가적인 저항은 프로펠러의 추력 (T)이 감당하는 것으로 하여 다음 식과 같은 조건을 만족하는 자 항점을 구하는 방법이다.
×
(9)
여기서 CFM과 CFS는 각각 모형선과 실선의 마찰저항계수를 나 타내고, CA는 각 선형시험수조들이 가지는 고유값인 상관관계 (correlation allowance)계수이다. 두 번째 식에서 RT(SP)는 자항 점에서 선체에 작용하는 전저항을 나타낸다. 관련된 자항 매개변 수(parameter)들은 구해진 추력을 설계 프로펠러의 POW(propeller open water)시험결과에 대응시킨 후 해당되는 전진비(advance ratio), 효율(efficiency)과 토오크(torque)를 찾은 후 계산된다.
점성유동과 포텐셜유동 해석간의 반복계산은 식 (9) 조건이 완 벽히 만족할 때까지 수행되어야 하지만, 수치해석적으로 0.5ρ U2Sw의 값으로 무차원화된 우변의 값이 10-6이하이면 충분히 수렴된 자항점을 얻은 것으로 판정할 수 있다. 보다 상세한 해석 절차는 참고문헌, Kim et al.(2008)에서 찾아볼 수 있다.
상기 두 프로그램간 반복계산 절차 수행에 있어 기존방식의 현 실적 문제점은 매 반복계산 시점에서 사람이 컴퓨터를 떠나지 못 하고, 점성유동 해석에서 얻은 선체 저항값에 해당하는 프로펠러 추력을 산출하기 위해 전진비의 요소항목인 프로펠러 회전수(rps) 를 시행착오 과정을 통해 찾아야 했다. 이는 설계 선형에 대한 한 자항점을 찾는데 약 2~3일이 소요되는 시간적 부담은 물론 두 프로그램을 별도로 각각 실행해야하는 번거로움을 주는 작업이었 다. 본 논문에서는 이러한 문제점을 두 프로그램을 하나로 통합 하고 증분탐색(incremental search method) 알고리즘을 내장시켜 상기 자항해석 과정을 자동화하는 것으로 해결하였다. 이럴 경우 5백만 격자수일 때 20개 정도의 CPU를 사용한다면 자항계산 시 간은 1일 이내로 감소된다.
Fig. 7은 자항성능 해석 과정에서 전체 5번의 반복계산 중 각 단계에서 점성유동 해석에서 구한 선체의 저항값에 해당하는 추 력계수 KT와 프로펠러 프로그램(LST)에서 제공된 값이 일치하는 전진비(JS)의 값을 내재된 증분탐색법으로 찾아가는 과정의 예를 보여주고 있다.
Fig. 8은 지금까지 설명한 저항 및 자항성능 수치해석에 대한 WAVIS가 보유하고 있는 수치계산 알고리즘을 설명하고 있다. 자
항성능 해석시 자세변화를 매번 함께 연성하여 고려할 수 있 다. 그러나 계산시간 감소를 위해 일반적으로 저속비대선의 경우 상대적으로 자세변화가 작다는 상황을 고려하여, 자세변화에 따 른 저항계산을 먼저 수행하고 그 결과를 바탕으로 자항성능 해석 을 수행하는 방법을 취하였다.
Fig. 7 Convergence history of a self-propulsion computation
Fig. 8 Computation strategy
3. 수치해석 결과
3.1 저항성능 해석결과
선박의 저항성능 해석기법을 검증하기 위해 MOERI 선형시험 수조의 모형시험 결과가 있는 KCS, KLNG, KVLCC1, 세척의 대 상 선형들을 선정하였다. 본 논문은 저항값을 주로 비교하고 있 으며, WAVIS에 도입된 수치모델들에 의한 선미 반류 및 파형에 대한 자세한 특성은 앞서 게재된 논문(Kim et al., 2009)에서 볼 수 있다. 각 선형에 대한 오프셋 및 주요 모형시험 정보는 Fig. 9, 10, 11과 Table 1, 2 그리고 3에 각각 나타냈었다. 특별히 CFD 결과를 검증하기 위한 목적으로 자세변화 유무에 따른 세 선형에 대한 모형시험이 수행된 바 있으며 그 결과는 공개 자료로 제공 되고 있다. 수치계산을 위해 본 논문에서 개발된 격자 생성법을 이용하였으며, 유동의 대칭성을 고려해 선체의 우현 유동 영역에 대해 Table 4에서 볼 수 있듯이 격자수 조밀도 비(ratio)가
인 세 가지 격자계(coarse, medium, fine)를 구성하였다. 선체 벽 면으로부터 무차원 거리 50<y+(=uτΔy/ν)<150 조건을 만족시키 기 위해 KCS와 KLNG의 모든 격자에서 Δy=0.0004를 사용하였 다. 상대적으로 두꺼운 난류 경계층을 가지는 KVLCC1에 대해서 는 Δy=0.00025의 낮은 값을 사용하여 벽면 근방의 격자 집중도 를 높였다. 여기서 uτ(=
)는 마찰속도(friction velocity), ν 는 동점성계수(kinematic viscosity) 그리고 τw는 벽면 전단력 (wall shear stress)를 나타낸다. 계산영역은 -1.5≤x/Lpp≤2.0, 0.0≤y/Lpp≤1.0, -0.03≤z/Lpp≤1.0이며 선체의 F.P.와 A.P.는 정수면(z/Lpp=0.0)의 x/Lpp=-0.5와 0.5에 각각 위치하고 있다.Fig. 9 Body plan for KCS
Fig. 10 Body plan for KLNG
Fig. 11 Body plan for KVLCC1
Table 1 Principal particulars of KCS
KCS Ship Model
Scale ratio 31.6
L
pp(m) 230.0 7.2786
B(m) 32 .2 1.019
T(m) 10.8 0.3418
Speed(m/s) 12.3466 (24.0kts) 2.197
Fn 0.26
Re 2.58x109 1.40x107
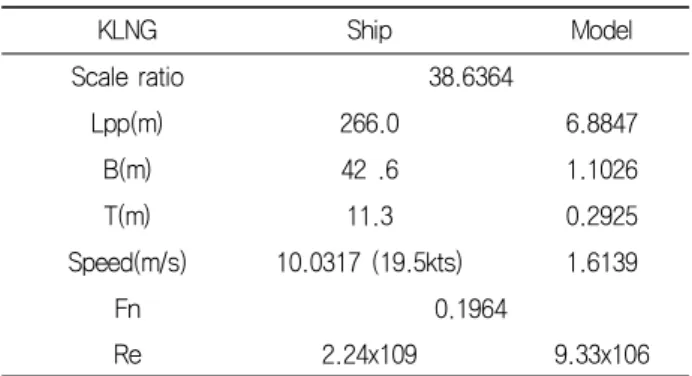
Table 2 Principal particulars of KLNG
KLNG Ship Model
Scale ratio 38.6364
Lpp(m) 266.0 6.8847
B(m) 42 .6 1.1026
T(m) 11.3 0.2925
Speed(m/s) 10.0317 (19.5kts) 1.6139
Fn 0.1964
Re 2.24x109 9.33x106
Table 3 Principal particulars of KVLCC1
KVLCC1 Ship Model
Scale ratio 58.0
Lpp(m) 320.0 5.5172
B(m) 58 .0 1.0
T(m) 20.8 0.3586
Speed(m/s) 7.9737 (15.5kts) 1.047
Fn 0.1423
Re 2.13x109 4.60x106
Table 4 Grid variation
Grid Hull surface
(longi.×girthwise)
No. of field grid
points
Δy*Coarse 80 × 55 0.82M 0.0004 Medium 113 × 78 2.33M 0.0004 Fine 160 × 110 6.51M 0.0004
*Δy=0.00025 for KVLCC1
3.1.1 저항계수 비교(1): 자세변화 없는 경우
Table 5, 6, 7은 선체의 자세변화가 없는 경우 KCS, KLNG, KVLCC1선형에 대한 저항값을 모형시험의 결과와 각각 비교하고 있다. KLNG의 fine격자의 경우를 제외하고 전체적으로 약 80만 격자점의 coarse격자에서 약 3%, medium격자이상에서 약 1%에 가까운 차이들을 보여주고 있다. 본 논문은 설계된 선형들에 대 한 저항성능 평가를 위한 수치계산은 약 200만 격자점의 medium 격자 수준에서 수행하기를 권장한다.
Table 5 Comparison of resistance coefficients for KCS in fixed running condition
KCS (fixed) C
Fx10
3C
Px10
3C
Tx10
3Coarse 2.773 0.877 3.650 ( 2.6%D)
Medium 2.789 0.792 3.581 ( 0.7%D)
Fine 2.801 0.736 3.537 (-0.6%D)
Exp. 2.832
(ITTC) 0.725 3.557
Table 6 Comparison of resistance coefficients for KLNG in fixed running condition
KLNG (fixed) C
Fx10
3C
Px10
3C
Tx10
3Coarse 2.953 1.026 3.979 ( 2.1%D)
Medium 2.948 0.933 3.881 (-0.5%D)
Fine 2.961 0.849 3.810 (-2.3%D)
Exp. 3.036
(ITTC) 0.863 3.899
Table 7 Comparison of resistance coefficients for KVLCC1 in fixed running condition
KVLCC1(fixed) C
Fx10
3C
Px10
3C
Tx10
3Coarse 3.259 0.962 4.221 ( 3.3%D) Medium 3.230 0.877 4.107 ( 0.5%D)
Fine 3.236 0.822 4.058 (-0.7%D)
Exp. 3.450
(ITTC) 0.638 4.088
3.1.2 저항계수 비교(2): 자세변화 있는 경우
Table 8, 9, 10, 11은 앞서 선체 자세변화가 없는 경우의 결과 에서 선형의 저항성능 평가에 적절한 격자크기로 판단되는 medium격자를 이용하고, 자세변화를 고려한 수치해석 결과를 모 형시험 결과와 비교하고 있다. Fig. 12는 앞서 설명한 대로 선체 자세변화 고려에 도입된 두 가지 접근법으로 계산된 KCS선형의 저항값 수렴특성을 비교하고 있다. 공간 격자계를 트림과 침하량 에 따라 회전과 이동을 시켜 계산하는 method-2의 경우 격자를 재성하는 시간을 많이 줄일 수 있지만 수렴은 method-1보다 약 간 느려지는 것을 볼 수 있다.
Table 8은 선체의 트림과 침하에 대한 수렴과정을 보여주고 있다.
Table 8 Convergence histories of trim and sinkage
iteration Sinkage Trim(°) △sinkage △Trim(°) 1 -0.0016 -0.1339 - - 2 -0.0022 -0.1759 -0.0006 -0.0420 3 -0.0021 -0.1609 0.0001 0.0150 4 -0.0020 -0.1529 0.0001 0.0080 5 -0.0020 -0.1608 0.0000 -0.0079
Fig. 12 Comparison of convergence history
Table 9, 10, 11은 트림과 침하를 고려하는 경우 KCS, KLNG, KVLCC1선형에 대한 저항계수 및 자세변화 값을 모형시험의 결 과와 각각 비교하고 있다. 저항값은 자세변화를 고려하지 않은 경우보다 약간 높은 약 2%대의 차이를 보이고 있다. 여기서, KVLCC1선형에 대해서는 모형시험에서 선체 자세변화 유무에 따 른 저항성능 평가가 명확하지 않아 자세변화가 없는 모형시험의 저항값이 제공되어 있다. 수치계산에서 구해진 선체의 트림과 침 하량은 모형시험 결과와 비교적 타당한 일치를 잘 보여주고 있다.
Table 9 Comparison of resistance coefficients and hull attitude for KCS
KCS
(free) C
Fx10
3C
Px10
3C
Tx10
3Sinkage Trim(°) method-1 2.851 0.884 3.735
(1.94%D) -0.0020 -0.161 method-2 2.859 0.885 3.744
(2.18%D) -0.0022 -0.168 Exp. 2.832
(ITTC) 0.832 3.664 -0.0019 -0.169
Table 10 Comparison of resistance coefficients and hull attitude for KLNG
KLNG
(free) C
Fx10
3C
Px10
3C
Tx10
3Sinkage Trim(°) method-1 2.981 0.931 3.912
(-1.68%D) -0.0015 -0.118 method-2 2.979 0.934 3.913
(-1.66%D) -0.0014 -0.118 Exp. 3.036
(ITTC) 0.943 3.979 -0.0014 -0.081
Table 11 Comparison of resistance coefficients and hull attitude for KVLCC1
KVLCC1
(free) C
Fx10
3C
Px10
3C
Tx10
3Sinkage Trim(°) method-1 3.282 0.857 4.139
(-%D) -0.0011 -0.135 method-2 3.264 0.862 4.126
(-%D) -0.0010 -0.134 Exp.(fixed*) 3.450
(ITTC) 0.638 4.088 -0.0008 -0.141
*Exp. data for free condition is not available.
3.2 자항성능 해석 결과
본 절은 앞서 선체의 자세변화가 없는 경우의 결과에서 선형의 저항성능평가에 적절한 격자크기로 판단되는 medium격자를 이용 한 KCS선의 자항성능 해석 결과를 제공한다. 이 때 선체의 좌현,
우현 영역을 모두 고려해야 하므로 격자수는 약 5백만에 가까워 진다. KCS선형의 자항시험 수치해석 결과를 검증하기 위해 일본 의 NMRI에서 선체의 자세변화 및 타(rudder)가 없는 나선(bare hull) 대해 수행된 모형시험 결과를 이용하였다(Hino 2005).
Fig. 13은 KP505 프로펠러의 형상과 주요 치수들을 보여주고 있다.
Fig. 13 Blade profile and principal dimensions of KP505 propeller
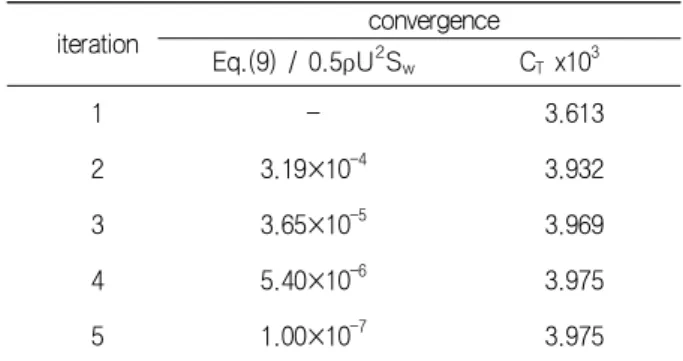
Table 12 Convergence history
iteration convergence
Eq.(9) / 0.5ρU
2S
wC
Tx10
31 - 3.613
2 3.19×10
-43.932
3 3.65×10
-53.969
4 5.40×10
-63.975
5 1.00×10
-73.975
Table 12와 13은 KCS선형에 대해 수행된 자항성능 수치해석 의 수렴과정과 그 결과를 일본 NMRI의 모형시험 결과와 비교하 고 있다. 여기서 t, w는 각각 추력감소(thrust deduction)와 반류 계수(wake fraction)를 나타내며, ηo, ηr, ηd는 각각 프로펠러단 독효율(open water propeller efficiency), 상대회전효율(relative rotational efficiency), 추진효율(propulsive efficiency)을 나타낸 다. 계산에서 수렴판정으로 사용한 저항, 예인력과 추력간의 관 계식(9)에 대해 무차원화한 값이 10-7수준으로 수렴된 것을 볼 수 있다. 수치계산에서 추정한 선체의 저항계수, 프로펠러 프로그 램의 입력정보가 되는 반류분포에 대한 난류모델의 영향, 그리고 체적력 방법에 의한 프로펠러 효과 모사 등에서 발생할 수 있는 수치 모델링 오차들로 인해 수치해석 결과는 실제 모형시험 결과 와 약간의 차이를 보이고 있다. 그러나 그 차이를 살펴볼 때 힘과 효율에 대해 타당한 추정 정도를 보여주고 있어, 본 수치해석 알 고리즘이 저항성능 평가에서와 같이 선형들 사이의 정성적인 우열 을 결정하는데 향후 유용하게 사용될 수 있을 것으로 판단된다.
Table 13 Comparison of self-propulsion parameters
K
TK
Qn J t w
ηo ηr ηdCFD 0.168 0.0288 9.70 0.726 0.157 0.198 0.664 1.014 0.708
EXP 0.170 0.0288 9.50 0.728 0.147 0.208 0.682 1.011 0.740
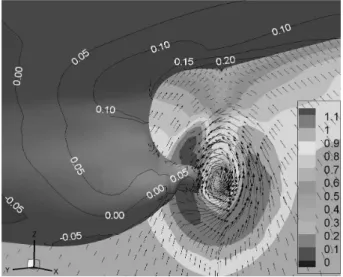
Fig. 14는 자항점에서 계산된 선미 선체 표면에서의 압력분포 와 프로펠러 작용 위치에서 x축 방향 유속 등고선 분포와 횡방향 의 속도벡터를 보여주고 있다. 그림에서 프로펠러에 의해 가속된 x축방향 및 횡방향 속도장의 비대칭적인 특징을 볼 수 있다.
Fig. 14 A perspective view of the hull surface pressure and axial velocity contours with transverse velocity vectors at x/Lpp = 0.489
4. 결 론
선체 주위 자유수면을 포함한 RANS유동 해석법을 기반으로 주어진 선형에 대한 저항 및 자항성능을 추정할 수 있는 수치기 법을 개발하였다. 비교적 짧은 시간에 기본 오프셋으로부터 자 유수면을 고려하는 공간 격자계를 생성할 수 있으며, 두 가지 접근법으로 선체의 트림과 침하량을 계산할 수 있도록 하였다.
프로펠러 유동을 고려하기 위해 직접적인 격자 모델링을 통한 해석은 피하고 양력면이론 기반의 프로펠러 성능해석 프로그램 을 도입하였다. 자항성능 해석시 RANS와 프로펠러 유동 프로 그램을 각각 개별적으로 실행해야 했던 기존 방식을 개선하여 두 프로그램이 통합된 알고리즘 안에서 자동으로 연동되게 하 였다. 이를 통해 사용자의 편의성을 높이고 전체 계산 소요시간 을 감소시킬 수 있었다.
개발된 수치해석 기법을 선형시험수조에서 수행된 KCS, KLNG, 그리고 KVLCC1의 저항시험과 KCS선형에 대한 자항시험에 적 용하고, 그 결과들을 각각 모형시험 결과와 비교하여 본 방법의 정도를 검증하였다. 저항의 경우 자세변화가 없는 저항시험 조
건에서 KLNG선형을 제외하고 약 2백만 격자수 이상에서 모형 시험과 1% 내외의 차이를 보였다. 반면, 자세변화가 있는 저항 시험 조건에 대해서는 약 2% 대의 차이를 보였다. 자항성능 해석 법의 경우 KCS선형에 대한 모형시험 결과와 비교적 타당한 일치 를 보여 주었으며, 설계된 선형들 사이의 정성적인 우열을 결정하 는 목적으로 본 방법이 유용하게 사용될 수 있음을 보여주었다.
향후, 도입된 여러 수치 모델링들에 의한 오차를 줄임으로 수 치해석 결과의 정확도를 높이는 노력이 필요할 것으로 사료된다.
후 기
본 논문은 지식경제부 산업원천기술개발사업 과제(PNS149C) 와 한국해양연구원 해양시스템안전연구소(MOERI/KORDI)의 기 본연구과제(PES141B)의 지원으로 작성되었습니다.
참 고 문 헌
Choi, J.E. Kim, J.H. Lee, H.G. & Park, D.W., 2010.
Hydrodynamic Characteristics and Speed Performance of a Full Spade and a Twisted Rudder. Journal of the Society of Naval Architects of Korea, 47(2), pp.163-177.
Ferziger, J.H. & Perić, M., 1996. Computational Methods for Fluid Dynamics. Springer-Verlag, Berlin.
Hino, T.(editor), 2005. Proc. of CFD Workshop Tokyo 2005, Japan.
Kerwin, J.E. & Lee, C.S., 1978. Prediction of steady and unsteady marine propeller performance by numerical lifting surface theory. The Transactions of the Society of Naval Architects and Marine Engineers 86.
Kim, B.N. Kim, W.J. Kim, K.S. & Park, I.R., 2009. The Comparison of Flow Simulation Results around a KLNG Model Ship. Journal of the Society of Naval Architects of Korea, 46(3), 219-231.
Kim, H.J. Chun, H.H. & An, N.H., 2008. Hull Form Optimization using Parametric Modification Functions and Global Optimization. Journal of the Society of Naval Architects of Korea, 45(6), pp.590-600.
Kim, H.T. Kim, H.T. & Van, S.H., 2007a. Numerical Analysis of Flow Characteristics of a Twin-skeg ContainerShip with Variation of Stern Hull Shape. Journal of the Society of Naval Architects of Korea, 44(6), pp.551-563.
Kim, J. Park, I.R. Kim, K.S. & Van, S.H., 2005. RANS Computation of Turbulent free Surface Flow around a Self Propelled KLNG Carrier. Journal of the Society of Naval Architects of Korea, 42(6), pp.583-592.
Kim, K.S. Kim, J. Park, I.R. Kim, G.D. & Van, S.H., 2007b.
RANS Analysis for Hull-Propeller-Rudder Interaction of a Commercial Ship by Using the Overset Grid Scheme. 9th International Conference on Numerical Ship Hydrodynamics, Ann Arbor, Michigan, August 5-8.
Kim, W.J. Kim, D.H. & Van, S.H. 1999. Development of 3-D Field Grid Generating Method for Viscous Flow Calculation around a Practical Hull Form. Journal of the Society of Naval Architects of Korea, 36(1), pp.70-81.
Kim, W.J. Kim, D.H. & Van, S.H., 2000. Development of Computational Methods for Viscous Flow around a commercial Ship Using Finite-Volume Methods. Journal of the Society of Naval Architects of Korea, 37(4), pp.19-31.
Kim, W.J. Kim, D.H. & Van, S.H., 2002. Computational study on turbulent flows around modern tanker hull forms.
International Journal for Numerical Methods in Fluids, 38(4), pp.377-406.
Kim, W.J. & Van, S.H., 1999. Practical Method for Generating Surface Mesh using Offset Table. Journal of the Society of Naval Architects of Korea, 36(1), pp.61-69.
Launder, B.E. & Spalding, D.B., 1974. The Numerical Computation of Turbulent Flows. Computer Methods in Applied Mechanics and Engineering, Vol. 3, pp.269-289.
Park, D.W. Choi, H.J. Yoon, H.S. & Chun, H.H., 2009. A Numerical Study for Improvement of the Speed -performance of a Ship with Flow Control Flat Plate.
Journal of the Society of Naval Architects of Korea, 46(3), pp.268-278.
Park, H.S. Kim, B.N. & Kim, W.J., 2008. Hull Form Development of a Bulk Carrier using CFD. Journal of the Society of Naval Architects of Korea, 45(5), pp.502-512.
Park, I.R. Kim, J. & Van, S.H., 2004. Analysis of Resistance Performance of Modern Commercial Ship Hull Form using a Level-Set Method. Journal of the Society of Naval Architects of Korea, 41(2), pp.79-89.
Seo, K.C. Atlar M. Kim, H.J. & Chun, H.H., 2009.
Minimization of Wave-making Resistance for Inclined Keel Containership. Journal of the Society of Naval Architects of Korea, 46(2), pp.97-104.
Shih, T.-H. Liou, W.W. Shabir, A. & Zhu, J., 1995. A New k-ε Eddy Viscosity Model for High Reynolds Number Turbulent Flows-Model Development and Validation. Computers and Fluids, 24(3), pp.227-238.
Sorenson, R.L., 1980. A computer program to generate two-dimensional grids about airfoils and other shapes by the use of Possion equation. NASA TM 81198.
Thomas P.D. & Middlecoff J.F., 1980. Direct control of the grid point distribution in meshes generated by elliptic equation. AIAA Journal, 18(6), pp.652-656.
Yang, H.E. Kim, B.N. Yoo, J.H. & Kim. W.J., 2010. Wake Comparison between Model and Full Scale Ships Using CFD. Journal of the Society of Naval Architects of Korea, 47(2), pp.150-162.
김 진 박 일 룡 김 광 수 반 석 호
김 유 철