https://doi.org/10.7848/ksgpc.2017.35.6.471
정밀절대측위를 이용한 준실시간 GNSS 가강수량 시스템 개발
Development of Near Real Time GNSS Precipitable Water Vapor System
Using Precise Point Positioning
윤하수1)·조정호2)·박한얼3)·유성문4)
Yoon, Ha Su · Cho, Jung Ho · Park, Han Earl · Yoo, Sung Moon
Abstract
GNSS PWV (Precipitable Water Vapor) is recognized as an important factor for weather forecasts of typhoons and heavy rainfall. Domestic and foreign research have been published that improve weather forecasts using GNSS PWV as initial input data to NWP (Numerical Weather Prediction) model. For rainfall-related weather forecasts, PWV should be provided in real time or NRT (Near-Real Time) and the accuracy and integrity should be maintained. In this paper, the development process of NRT GNSS PWV system using PPP (Precise Point Positioning). To this end, we optimized the variables related to tropospheric delay estimation of PPP. For the analysis of the PPP NRT PWV system, we compared the PWV precision of RP (Relative Positioning) and PPP.
As a result, the accuracy of PPP was lower than that of RP, but good results were obtained in the PWV data integrity. Future research is needed to improve the precision of PWV in the PPP method.
Keywords: Precise Point Positioning, Near Real Time, Global Navigation Satellite System, Precipitable Water Vapor
초 록
GNSS 가강수량은 태풍이나 집중호우의 일기예보를 위한 중요한 요소로 인식되고 있으며, 가강수량을 수치예보 모델에 초기 입력값으로 적용하여 일기예보가 향상되는 연구가 국내·외로 발표되고 있다. 호우 관련 일기예보를 위 해서는 가강수량이 실시간 또는 준실시간으로 제공되어야 하며 가강수량 자료의 정밀함과 무결성이 유지되어야 한 다. 본 논문에서는 정밀절대측위를 이용한 준실시간 가강수량 산출 시스템 개발 과정에 대해 제시하였다. 이를 위 하여 정밀절대측위의 대류권 지연 추정과 관련된 변수를 최적화하고 준실시간 GNSS 가강수량 시스템을 개발하였 다. 시스템의 분석을 위해 정밀절대측위와 상대측위의 준실시간 가강수량 정밀도를 비교하였다. 비교결과 정밀절대 측위의 가강수량 정밀도가 상대측위 보다 낮게 산출되었지만 자료의 무결성 부분에서는 좋은 결과가 도출되었다.
향후에는 정밀절대측위 방식의 가강수량 정밀도를 높이는 연구가 필요할 것이다.
핵심어: 정밀절대측위, 준실시간, 위성항법시스템, 가강수량
471 Original article
Received 2017. 10. 31, Revised 2017. 11. 07, Accepted 2017. 12. 15
1) Member, Space Geodesy Group, Korea Astronomy and Space Science Institute (E-mail: [email protected])
2) Corresponding Author, Space Geodesy Group, Korea Astronomy and Space Science Institute (E-mail: [email protected]) 3) Space Geodesy Group, Korea Astronomy and Space Science Institute (E-mail: [email protected])
4) Space Geodesy Group, Korea Astronomy and Space Science Institute (E-mail: [email protected])
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 35, No. 6, 471-484, 2017
472
1. 서 론
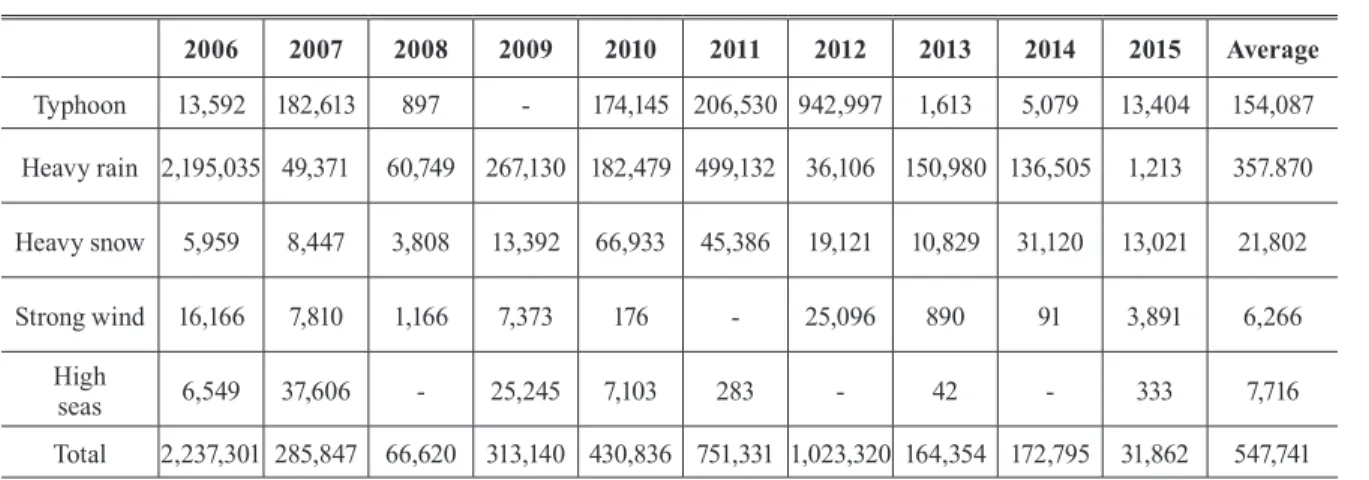
우리나라는 최근 기후 변화에 따른 돌발적인 집중호우의 발생 빈도가 높아지고 있으며, 이에 따른 인적·경제적 피해도 증가하고 있다. 2016년 국민안전처에서 발간한 재해연보에 따 르면 2006년에서 2015년까지 태풍이나 호우에 의한 재산피해 및 인명피해가 다른 재해보다 높은 비중을 나타냈다(MOIS, 2016). Table 1과 2는 10년간 자연재해로 발생된 재산피해 및 인명피해를 나타낸 표이다. 이러한 태풍이나 호우와 같은 물 관련 자연재해를 대비하기 위한 방법으로 정확한 일기예보가 방안이 될 수 있으며, 일기예보의 정확도가 점점 중요하게 여 겨지고 있다.
일기예보가 정확해지기 위해서는 수치예보모델에 입력하 는 기상인자의 다양성과 정밀함이 필요하다. 이 중 가강수량 은 하나의 기상 인자로 사용될 수 있으며 수치예보모델에 사 용되고 있다. 가강수량은 대기에 포함된 수증기량을 단위면적 의 공기 기둥의 연직 깊이(mm)로 환산 한 것을 의미하며, 대 기 중의 수증기의 변화를 정량화 할 수 있는 인자이다(Kim and Bae, 2015). 가강수량은 라디오존데(radiosonde)와 마이 크로파 측정기(MWR : Microwave Radiometer)를 이용하여 측정이 가능하지만 관측 횟수, 비용, 기상 상황에 제약을 받 는다. 그러나 GNSS를 이용한 방법은 관측시간이나 기상에 자유로우며, 기존의 GNSS 상시관측소 자료를 이용하기 때문 에 경제적인 면 등에서 다양한 장점이 있다(Lee et al., 2007).
GNSS를 이용한 가강수량은 직접적으로 가강수량을 측정하 지는 않지만 일련의 과정을 통하여 가강수량을 산출하며, 그 정확도는 기존의 방법들과 비교하여 거의 비슷한 결과를 얻 는 것으로 알려져 있다.
국외의 GNSS를 이용한 가강수량 산출 연구는 크게 4가지 로 구분 될 수 있다. 시간적인 범위에서는 실시간으로 가강수 량을 산출하는 방법, 공간적으로는 전 세계 GNSS 네트워크 를 이용한 가강수량 산출 방안, 연구적 측면에서는 가강수량 정밀도의 향상, 활용적인 측면에서는 가강수량을 수치예보모 델에 적용하여 기상예측에 활용하는 연구로 이루어지고 있 다. 본 논문과 관련이 있는 GNSS 강수량을 제공하는 시스템 측면에서는 미국 NOAA(National Oceanic and Atmospheric Administration)의 GSD(Global Systems Division)는 1994년 세계 최초의 기상연구용 600여개의 GPS 관측망을 구축하 여 30분 간격의 누적가강수량(IPW : Integrated Precipitable Water)을 제공하는 GPS-MET 프로젝트를 운영하였다. 유 럽의 E-GVAP(The EUMETNET EIG GNSS water Vapour Programme)은 기상현업 적용을 위해 GNSS 지연량과 가강수
량 추정 정보를 준실시간으로 제공하며, 수치예보모델 자료동 화 연구를 진행하고 있다. E-GVAP의 준실시간 가강수량 정 보는 2010년부터 영국의 Met office와 체코의 GOP(Geodetic Observatory Pecny)에서 제공되고 있으며, GOP의 데이터는 2012년 이후 Met office 글로벌 수치예보모델에 동화되고 있 다(Douša and Bennitt, 2013). 또한 대류권의 경사방향의 총 지연량(STD : Slant Total Delay)를 이용한 Tomography와 Multi-GNSS를 이용한 천전방향의 총 지연량(ZTD : Zenith Total Delay) 산출도 진행 중이다(Guerova et al, 2016). 국외 의 가강수량 산출 시스템의 GNSS 처리 방식은 대부분 정밀 절대측위(PPP : Precise Point Positioning)를 이용하고 있다.
국내의 GNSS를 이용한 가강수량 연구는 1990년대 후 반부터 시작되었으며, 2000년대에는 평균온도식(mean temperature equation) 개발 등과 같은 가강수량 추정 정밀 도 향상 연구가 많이 이루어졌다. 2010년대에는 가강수량 을 이용한 기후분석 및 기상현업에 활용하는 연구 등이 진 행되었다(Park et al., 2016). 최근에는 건조지연 모델을 이용 한 GNSS 가강수량과 실제 대기의 평균온도를 이용한 가강 수량과의 편의량을 분석하는 연구(Nam and Song, 2017) 및 가강수량과 기상인자를 이용하여 딥러닝 기법으로 강수를 예측하는 연구가 진행되고 있다(Kim and Bae, 2017). 국내 의 GNSS 가강수량 시스템으로는 한국천문연구원의 ‘준실시 간 가강수량 정보 시스템’이 있으며 상대측위(RP : Relative Positioning) 방식으로 국내 80여개 GNSS 상시관측소의 가 강수량이 준실시간으로 제공되고 있다.
본 논문에서는 정밀절대측위(PPP) 방식을 이용한 준실시 간 가강수량과 상대측위 방식으로 산출된 가강수량의 정밀 도를 비교하였다. 그리고 두 가지 방식의 가강수량 산출 방법 의 장·단점을 분석하고 준실시간 PPP 가강수량 시스템 개발 과정에서 진행된 ZPD(Zenith Path Delay)와 수평 그래디언트 (horizon gradient)의 최적 변수 결과를 제시한다. GNSS 가강 수량 분석 연구와 관련하여 기존에는 후처리 방식의 가강수 량 연구가 주를 이루었으나 본 연구에서는 준실시간으로 계 산된 가강수량 이용한 분석을 실시하였다. 또한 처리방식에 서도 기존에는 정밀절대측위와 상대측위 중 한 가지를 이용 하여 분석한 것을 두 가지 방법으로 처리하고 비교한 것에 의 의가 있다.
473 도이며, 상승기류와 하강기류의 작용으로 비·눈·구름과 같은 기상현상이 일어난다. 대류권 지연이란 GNSS 신호가 대류권 을 통과하면서 지연되는 현상으로 GNSS의 측위정밀도와 관 계가 있으며, 측위의 오차요인으로 간주되던 대류권 지연을 반대로 분석해서 기상정보를 산출 할 수 있다는 개념이 GPS 기상학(GPS meteorology)이다(Bevis et al., 1992). GNSS 대 류권 지연 및 가강수량 산출과 관련된 이론은 기존의 논문 (Song and Grejner-Brzezinska, 2009; Ha, 2014; Nam and Song, 2015; Kim and Bae, 2015; Park et al., 2016)에서 많이 다루었으므로 본 논문에서는 간략하게 제시하였다.
준실시간 자료처리 프로그램에서 GNSS 자료처리는 Bernese 5.2 자료처리 프로그램을 이용하였다. Bernese 5.2는 GNSS 신호가 대류권을 통과하면서 발생하는 지연량을 수식 과 모델을 사용하여 보정한다. 이 과정에서 선험적(a priori) 수치에 대한 보정량이 결정되며, 두 값을 합산하여 천정방향
2. 연구이론 및 방법
본 연구는 정밀절대측위 방식을 이용한 준실시간으로 가강 수량을 산출하는 시스템을 개발하는 것이다. 이를 위해 우선 적으로 기존에 운영되던 준실시간 상대측위 가강수량 시스템 의 문제점을 도출한다. 그리고 10분 단위의 가강수량을 산출 하기 위한 정밀절대측위 방식에서의 대류권 지연 추정과 관련 된 최적 변수를 결정한다. 마지막으로 최적 변수를 적용한 정 밀절대측위와 상대측위의 준실시간 가강수량을 비교하여 정 밀도를 분석한다.
2.1 GNSS 신호의 대류권 지연
지구를 둘러싼 대기권은 기온, 기압 및 습도와 같은 요소별 로 특징을 나누어 몇 개의 영역으로 구분되고 있다. 대류권은 대기권의 가장 아래층으로 지표면으로부터 약 10 ~ 16km 정
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 Average
Typhoon 13,592 182,613 897 - 174,145 206,530 942,997 1,613 5,079 13,404 154,087 Heavy rain 2,195,035 49,371 60,749 267,130 182,479 499,132 36,106 150,980 136,505 1,213 357.870 Heavy snow 5,959 8,447 3,808 13,392 66,933 45,386 19,121 10,829 31,120 13,021 21,802 Strong wind 16,166 7,810 1,166 7,373 176 - 25,096 890 91 3,891 6,266 Highseas 6,549 37,606 - 25,245 7,103 283 - 42 - 333 7,716
Total 2,237,301 285,847 66,620 313,140 430,836 751,331 1,023,320 164,354 172,795 31,862 547,741 Table 1. Economic damage in natural disasters from 2006 to 2015 (source : MOIS, 2016) (unit : one million won)
2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 Average
Typhoon 63 - 11 13 7 77 2 4 2 - 18
Heavy rain - 16 - - 7 1 4 - - - 4
Heavy snow - 1 - - - 0
Strong wind - - - -
etc. - - - -
Total 63 17 11 13 14 78 16 4 2 0 22
Table 2. People killed in natural disasters from 2006 to 2015 (source : MOIS, 2016) (unit : person)
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 35, No. 6, 471-484, 2017
474
의 총 지연량(ZTD)을 산출하게 된다. 대류권 지연은 약 90%
는 건조지연 성분, 나머지 약 10%는 습윤지연 성분에 합으 로 나타낼 수 있다. 천정방향의 건조지연량 (ZHD : Zenith Hydrostatic Delay)은 GNSS가 관측된 지점의 기상센서나 기 상모델을 이용하여 온도, 압력 정보를 추출하여 건조지연량 을 추정한다. 습윤지연량(ZWD : Zenith Wet Delay)은 GNSS 자료처리 결과 산출된 ZTD와 ZHD의 차이를 이용해 계산한 다(Eq. (1)). ZWD는 평균온도식을 사용하면 ZWD와 가강수 량 사이의 변환인자 Q를 계산할 수 있어 가강수량으로 쉽게 환산할 수 있다(Schuler, 2001).
(1)
ZTD는 대략 2~3 m 정도이며 ZHD의 경우 기온 압력 등의 기상자료를 이용하면 정밀하게 모델링이 가능하다. 0.3 hPa 미만의 오차를 가지는 기압계를 사용하면 지상관측자료 만 으로 1 mm 오차 수준으로 보정할 수 있다(Bevis et al., 1992).
지상기압과 관측소 고도를 이용한 ZHD 산출방법은 Eq. (2) 와 같다(Elgered et al., 1991).
(2)
where, ZHD : Zenith Hydrostatic Delay : surface/
antenna pressure [hPa] , : ellipsoidal latitude, : surface/
antenna height above the ellipsoid [km]
습윤 성분에 기인한 대류권 지연은 수증기의 양이 공간과 시간에 따라 일정하지 않기 때문에 ZHD와는 다르게 정확하 게 모델링이 되지 않는다. 이러한 ZWD의 추정을 위해서는 선 험적 방법을 이용한다. 선험적 방법에 의한 ZTD는 선험적 건 조지연량인 AHD(A priori Hydrostatic Delay)와 선험적 습 윤지연량 AWD(A priori Wet Delay)의 합으로 나타낼 수 있 으며 Eq. (3)과 같다. ZDC(Zenith Delay Correction)는 선험 적 지연량에 대한 보정항으로 GNSS 자료 처리과정에서 추 정한다. 일반적으로 AWD는 0.1 m를 사용한다(Webb and Zumberge, 1993).
(3) - 5 -
지막으로 최적 변수를 적용한 정밀절대측위와 상대측위의 준실시간 가강수량을 비 교하여 정밀도를 분석한다.
2.1 GNSS 신호의 대류권 지연
지구를 둘러싼 대기권은 기온, 기압 및 습도와 같은 요소별로 특징을 나누어 몇 개의 영역으로 구분되고 있다. 대류권은 대기권의 가장 아래층으로 지표면으로부터 약 10 ∼ 16km 정도이며, 상승기류와 하강기류의 작용으로 비·눈·구름과 같은 기상 현상이 일어난다. 대류권 지연이란 GNSS 신호가 대류권을 통과하면서 지연되는 현 상으로 GNSS의 측위정밀도와 관계가 있으며, 측위의 오차요인으로 간주되던 대류 권 지연을 반대로 분석해서 기상정보를 산출 할 수 있다는 개념이 GPS 기상학 (GPS meteorology)이다(Bevis et al., 1992). GNSS 대류권 지연 및 가강수량 산출 과 관련된 이론은 기존의 논문(Song and Grejner-Brzezinska, 2009; Ha, 2014;
Nam and Song, 2015; Kim and Bae, 2015; Park et al., 2016)에서 많이 다루었으 므로 본 논문에서는 간략하게 제시하였다.
준실시간 자료처리 프로그램에서 GNSS 자료처리는 Bernese 5.2 자료처리 프로그 램을 이용하였다. Bernese 5.2는 GNSS 신호가 대류권을 통과하면서 발생하는 지연 량을 수식과 모델을 사용하여 보정한다. 이 과정에서 선험적(a priori) 수치에 대한 보정량이 결정되며, 두 값을 합산하여 천전방향의 총 지연량(ZTD)을 산출하게 된 다. 대류권 지연은 약 90%는 건조지연 성분, 나머지 약 10%는 습윤지연 성분에 합 으로 나타낼 수 있다. 천정방향의 건조지연량 (ZHD : Zenith Hydrostatic Delay)은 GNSS가 관측된 지점의 기상센서나 기상모델을 이용하여 온도, 압력 정보를 추출하 여 건조지연량을 추정한다. 습윤지연량(ZWD : Zenith Wet Delay)은 GNSS 자료처 리 결과 산출된 ZTD와 ZHD의 차이를 이용해 계산한다(Eq. (1)). ZWD는 평균온도 식을 사용하면 ZWD와 가강수량 사이의 변환인자 Q를 계산할 수 있어 가강수량으 로 쉽게 환산할 수 있다(Schuler, 2001).
(1)
ZTD는 대략 2∼3 m 정도이며 ZHD의 경우 기온 압력 등의 기상자료를 이용하면 정밀하게 모델링이 가능하다. 0.3 hPa 미만의 오차를 가지는 기압계를 사용하면 지
- 6 -
상관측자료 만으로 1 mm 오차 수준으로 보정할 수 있다(Bevis et al., 1992). 지상 기압과 관측소 고도를 이용한 ZHD 산출방법은 Eq. (2)와 같다(Elgered et al., 1991).
cos
±
(2)
where, ZHD : Zenith Hydrostatic Delay : surface/antenna pressure [hPa] ,
: ellipsoidal latitude, : surface/antenna height above the ellipsoid [km]
습윤 성분에 기인한 대류권 지연은 수증기의 양이 공간과 시간에 따라 일정하지 않기 때문에 ZHD와는 다르게 정확하게 모델링이 되지 않는다. 이러한 ZWD의 추 정을 위해서는 선험적 방법을 이용한다. 선험적 방법에 의한 ZTD는 선험적 건조지 연량인 AHD(A priori Hydrostatic Delay)와 선험적 습윤지연량 AWD(A priori Wet Delay)의 합으로 나타낼 수 있으며 Eq. (3)과 같다. ZDC(Zenith Delay Correction)는 선험적 지연량에 대한 보정항으로 GNSS 자료 처리과정에서 추정한 다. 일반적으로 AWD는 0.1 m를 사용한다(Webb and Zumberge, 1993).
(3)
AHD는 Eq. (4)를 이용하여 산출한다. 는 지상 관측소의 고도 [km] 를 의미한다.
(4)
Eq. (1)과 Eq. (3)으로부터 다음과 Eq. (5)같이 천정방향 습윤지연량을 산출할 수 있다.
(5)
천정방향 습윤지연량은 시선방향 습윤지연량(SWD : Slant Wet delay), IWV
- 6 -
상관측자료 만으로 1 mm 오차 수준으로 보정할 수 있다(Bevis et al., 1992). 지상 기압과 관측소 고도를 이용한 ZHD 산출방법은 Eq. (2)와 같다(Elgered et al., 1991).
cos
±
(2)
where, ZHD : Zenith Hydrostatic Delay : surface/antenna pressure [hPa] ,
: ellipsoidal latitude, : surface/antenna height above the ellipsoid [km]
습윤 성분에 기인한 대류권 지연은 수증기의 양이 공간과 시간에 따라 일정하지 않기 때문에 ZHD와는 다르게 정확하게 모델링이 되지 않는다. 이러한 ZWD의 추 정을 위해서는 선험적 방법을 이용한다. 선험적 방법에 의한 ZTD는 선험적 건조지 연량인 AHD(A priori Hydrostatic Delay)와 선험적 습윤지연량 AWD(A priori Wet Delay)의 합으로 나타낼 수 있으며 Eq. (3)과 같다. ZDC(Zenith Delay Correction)는 선험적 지연량에 대한 보정항으로 GNSS 자료 처리과정에서 추정한 다. 일반적으로 AWD는 0.1 m를 사용한다(Webb and Zumberge, 1993).
(3)
AHD는 Eq. (4)를 이용하여 산출한다. 는 지상 관측소의 고도 [km] 를 의미한다.
(4)
Eq. (1)과 Eq. (3)으로부터 다음과 Eq. (5)같이 천정방향 습윤지연량을 산출할 수 있다.
(5)
천정방향 습윤지연량은 시선방향 습윤지연량(SWD : Slant Wet delay), IWV
AHD는 Eq. (4)를 이용하여 산출한다. 는 지상 관측소의 고도 [km] 를 의미한다.
(4)
Eq. (1)과 Eq. (3)으로부터 다음과 Eq. (5)같이 천정방향 습 윤지연량을 산출할 수 있다.
(5)
천정방향 습윤지연량은 시선방향 습윤지연량(SWD : Slant Wet delay), IWV (Integrated Water Vapor), 그리고 가강수 량으로 환산할 수 있다(Eq. (6), Eq.(7), Eq.(8)). 여기서 Q는 ZWD와 가강수량 사이의 변환인자를 의미하며, 는 굴절 상수와 평균온도식에 의해 결정된다(Eq. (9)). 는 사상함수 (mapping function)를 의미한다.
where, SWD : Slant Wet delay, : Wet mapping function, : Density of water, IWV : Integrated Water Vapor, PWV : Precipitable Water Vapor, : Conversion factor
where, , : Refractive index constants, : Specific gas constant of water vapor, : Mean temperature in the troposphere, : Density of water
평균온도식은 지표면 온도와 대기의 평균온도의 관계식이 며, 사상함수는 천정방향의 지연량과 시선방향의 관계식이 다. 사상함수의 는 관측점과 수신기가 이루는 고도각을 나 타낸다(Park et al., 2016). IWV는 연직누적 수증기량을 의미 한다.
2.2 GNSS 측위 방식
상대측위는 지상의 기준점과 미지점에서 동시에 같은 - 6 -
상관측자료 만으로 1 mm 오차 수준으로 보정할 수 있다(Bevis et al., 1992). 지상 기압과 관측소 고도를 이용한 ZHD 산출방법은 Eq. (2)와 같다(Elgered et al., 1991).
cos
±
(2)
where, ZHD : Zenith Hydrostatic Delay : surface/antenna pressure [hPa] ,
: ellipsoidal latitude, : surface/antenna height above the ellipsoid [km]
습윤 성분에 기인한 대류권 지연은 수증기의 양이 공간과 시간에 따라 일정하지 않기 때문에 ZHD와는 다르게 정확하게 모델링이 되지 않는다. 이러한 ZWD의 추 정을 위해서는 선험적 방법을 이용한다. 선험적 방법에 의한 ZTD는 선험적 건조지 연량인 AHD(A priori Hydrostatic Delay)와 선험적 습윤지연량 AWD(A priori Wet Delay)의 합으로 나타낼 수 있으며 Eq. (3)과 같다. ZDC(Zenith Delay Correction)는 선험적 지연량에 대한 보정항으로 GNSS 자료 처리과정에서 추정한 다. 일반적으로 AWD는 0.1 m를 사용한다(Webb and Zumberge, 1993).
(3)
AHD는 Eq. (4)를 이용하여 산출한다. 는 지상 관측소의 고도 [km] 를 의미한다.
(4)
Eq. (1)과 Eq. (3)으로부터 다음과 Eq. (5)같이 천정방향 습윤지연량을 산출할 수 있다.
(5)
천정방향 습윤지연량은 시선방향 습윤지연량(SWD : Slant Wet delay), IWV - 6 -
상관측자료 만으로 1 mm 오차 수준으로 보정할 수 있다(Bevis et al., 1992). 지상 기압과 관측소 고도를 이용한 ZHD 산출방법은 Eq. (2)와 같다(Elgered et al., 1991).
cos
±
(2)
where, ZHD : Zenith Hydrostatic Delay : surface/antenna pressure [hPa] ,
: ellipsoidal latitude, : surface/antenna height above the ellipsoid [km]
습윤 성분에 기인한 대류권 지연은 수증기의 양이 공간과 시간에 따라 일정하지 않기 때문에 ZHD와는 다르게 정확하게 모델링이 되지 않는다. 이러한 ZWD의 추 정을 위해서는 선험적 방법을 이용한다. 선험적 방법에 의한 ZTD는 선험적 건조지 연량인 AHD(A priori Hydrostatic Delay)와 선험적 습윤지연량 AWD(A priori Wet Delay)의 합으로 나타낼 수 있으며 Eq. (3)과 같다. ZDC(Zenith Delay Correction)는 선험적 지연량에 대한 보정항으로 GNSS 자료 처리과정에서 추정한 다. 일반적으로 AWD는 0.1 m를 사용한다(Webb and Zumberge, 1993).
(3)
AHD는 Eq. (4)를 이용하여 산출한다. 는 지상 관측소의 고도 [km] 를 의미한다.
(4)
Eq. (1)과 Eq. (3)으로부터 다음과 Eq. (5)같이 천정방향 습윤지연량을 산출할 수 있다.
(5)
천정방향 습윤지연량은 시선방향 습윤지연량(SWD : Slant Wet delay), IWV
(6) (7) (8)
- 7 -
⋅ (6)
⋅ (7)
(8)
≡
′
(9)
평균온도식은 지표면 온도와 대기의 평균온도의 관계식이며, 사상함수는 천정방향 의 지연량과 시선방향의 관계식이다. 사상함수의 는 관측점과 수신기가 이루는 고 도각을 나타낸다(Park et al., 2016). IWV는 연직누적 수증기량을 의미한다.
2.2 GN SS 측위 방식
상대측위는 지상의 기준점과 미지점에서 동시에 같은 GNSS 신호를 수신하여 미 지점의 좌표를 산출하는 방법이다(Fig. 1). 신호가 수신되는 동안 발생하는 오차를 단기선의 경우 오차가 같다고 가정하여 제거할 수 있으며, 중·장기선에서는 오차를 최소화하여 위치를 결정하는 방법이다. 상대측위는 정밀한 위치결정이 가능하지만 기준점에 대한 GNSS 관측이 필요하며, 미지점의 추정된 좌표는 기지점의 좌표에 많은 영향을 받는다는 단점이 있다(Yoon, 2015). 정밀절대측위는 기준국에서 생성된 보정정보 또는 기준국의 원시데이터를 사용하지 않고 수신기가 설치된 지점의 정밀 한 위치를 단독적으로 결정하는 것이다(Fig. 2). 정밀절대측위의 장점으로는 처리 결과에 다른 관측의 영향을 받지 않으며, 처리용량이 상대측위와 비교하여 적어 빠
(9)
475 GNSS 신호를 수신하여 미지점의 좌표를 산출하는 방법이다
(Fig. 1). 신호가 수신되는 동안 발생하는 오차를 단기선의 경 우 오차가 같다고 가정하여 제거할 수 있으며, 중·장기선에서 는 오차를 최소화하여 위치를 결정하는 방법이다. 상대측위 는 정밀한 위치결정이 가능하지만 기준점에 대한 GNSS 관측 이 필요하며, 미지점의 추정된 좌표는 기지점의 좌표에 많은 영향을 받는다는 단점이 있다(Yoon, 2015). 정밀절대측위는 기준국에서 생성된 보정정보 또는 기준국의 원시데이터를 사 용하지 않고 수신기가 설치된 지점의 정밀한 위치를 단독적으 로 결정하는 것이다(Fig. 2). 정밀절대측위의 장점으로는 처리 결과에 다른 관측의 영향을 받지 않으며, 처리용량이 상대측 위와 비교하여 적어 빠른 시간의 처리가 가능하다.
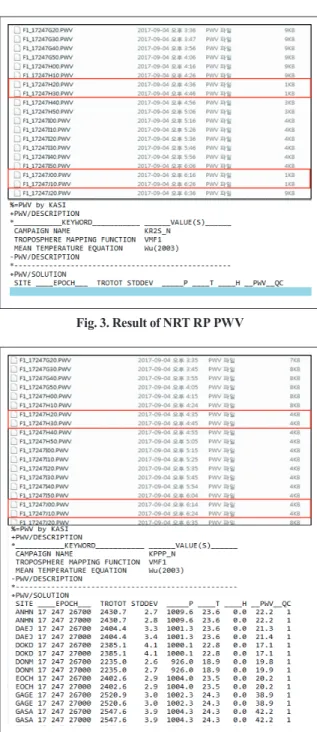
위에 언급된 것처럼 상대측위 방식 가강수량 산출 시스템 의 경우 다른 관측소의 영향으로 전체적인 가강수량이 산출 되지 않는 경우가 발생하였다. 첫 번째 사례로는 GNSS 관측 자료(RINEX : Receiver Independent Exchange Format)를 실시간으로 다운받을 수 있는 NTRIP(Networked Transport of RTCM via Internet Protocol)의 문제나 상시관측소 관리 기관의 유지 보수로 인하여 상시관측소의 자료가 급격하게 감소하거나 전송되지 않는 경우 모든 관측소의 가강수량이 산출되지 않았다. 두 번째 사례로는 가강수량 산출 시스템의 reference 관측소로 사용되는 해외 IGS(International GNSS Service) 관측소 자료의 품질이 좋지 않은 경우 전체적으로 가 강수량이 산출되지 않았다. 아래 Fig. 3과 Fig. 4는 2017년 9 월 4일 같은 시간의 두 가지 방식의 준실시간 가강수량 시스
템을 비교한 것으로 관측 자료가 80개에서 20개정도로 급격 하게 감소한 경우로 상대측위의 경우 가강수량 결과가 산출 되지 않았다(Fig. 3). 그러나 정밀절대측위 방식은 다운로드 받은 20여개의 관측소의 가강수량이 산출되었다(Fig. 4). 이 와 같이 가강수량 산출 및 제공의 무결성 유지하기 위해 정 밀절대측위 방식의 가강수량 산출시스템을 개발하게 되었다.
Fig. 1. Concept of RP (Yoon, 2015)
Fig. 2. Concept of PPP (Yoon, 2015)
Fig. 3. Result of NRT RP PWV
Fig. 4. Result of NRT PPP PWV
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 35, No. 6, 471-484, 2017
476
3. 준실시간 GNSS 가강수량 시스템 개발을 위한 최적 변수 결정
3.1 정밀절대측위 처리의 최적 변수 연구 개요 본 연구는 Bernese 5.2(이하 Bernese) GNSS 자료처리 프로 그램을 이용한다. Bernese는 학술용 GNSS 처리 시스템으로 스위스 Bern 대학 천문연구소에서 개발되었으며, 표준화된 프 로그램의 실행순서에 따라 자동적으로 처리하는 BPE(Bernese Processing Engine)를 제공하고 있다. GNSS의 처리에 있어 사 용자 가 다양한 변수와 모델의 적용이 가능하다.
Bernese 프로그램의 대류권 지연 결과물은 아래 Eq. (10) 과 같이 세 부분으로 구성된 기본 수식을 바탕으로 산출된다 (Dach et al, 2015). 이 중 선험적 모델(a priori model)과 사상 함수는 기존의 연구가 많이 이루어졌으며(Park et al., 2016;
Nam and Song, 2017), 본 연구에서는 이에 대한 평가를 하 지 않았다.
(10)
where,
: is the total tropospheric path delay between station k and satellite i,
: is the observation time,
: are the zenith and azimuth of satellite i as observed from station k,
: is the slant delay according to an a priori model, and
: is a (time–dependent) ZPD parameter and its mapping function.
: are the (time–dependent) horizontal north and east troposphere gradient parameters.
Bernese는 대류권 지연과 관련된 파라미터를 결정하기 위 하여 Eq. (10)과 같이 선험적 모델, 사상함수, ZPD, horizontal gradient 요소를 이용한다. 이 중 선험적 모델과 사상함수 는 Table 4와 같이 ECMWF(European Centre for Medium- Range Weather Forecasts)의 수치예보모델에 기반을 둔 최 신사상함수모델 VMF1(Vienna Mapping Function1)을 이
- 9 -
Fig. 3. Result of NRT RP PWV Fig. 4. Result of NRT PPP PWV
3. 준실시간 GNSS 가강수량 시스템 개발을 위한 최적 변수 결정
3.1 정밀절대측위 처리의 최적 변수 연구 개요
본 연구는 Bernese 5.2(이하 Bernese) GNSS 자료처리 프로그램을 이용한다.
Bernese는 학술용 GNSS 처리 시스템으로 스위스 Bern 대학 천문연구소에서 개발 되었으며, 표준화된 프로그램의 실행순서에 따라 자동적으로 처리하는 BPE(Bernese Processing Engine)를 제공하고 있다. GNSS의 처리에 있어 사용자 가 다양한 변수와 모델의 적용이 가능하다.
Bernese 프로그램의 대류권 지연 결과물은 아래 Eq. (10)과 같이 세 부분으로 구 성된 기본 수식을 바탕으로 산출된다(Dach et al, 2015). 이 중 선험적 모델(a priori model)과 사상함수는 기존의 연구가 많이 이루어졌으며(Park et al., 2016; Nam and Song, 2017), 본 연구에서는 이에 대한 평가를 하지 않았다.
mod
mod
cos
sin (10) where,
- 9 -
Fig. 3. Result of NRT RP PWV Fig. 4. Result of NRT PPP PWV
3. 준실시간 GNSS 가강수량 시스템 개발을 위한 최적 변수 결정
3.1 정밀절대측위 처리의 최적 변수 연구 개요
본 연구는 Bernese 5.2(이하 Bernese) GNSS 자료처리 프로그램을 이용한다.
Bernese는 학술용 GNSS 처리 시스템으로 스위스 Bern 대학 천문연구소에서 개발 되었으며, 표준화된 프로그램의 실행순서에 따라 자동적으로 처리하는 BPE(Bernese Processing Engine)를 제공하고 있다. GNSS의 처리에 있어 사용자 가 다양한 변수와 모델의 적용이 가능하다.
Bernese 프로그램의 대류권 지연 결과물은 아래 Eq. (10)과 같이 세 부분으로 구 성된 기본 수식을 바탕으로 산출된다(Dach et al, 2015). 이 중 선험적 모델(a priori model)과 사상함수는 기존의 연구가 많이 이루어졌으며(Park et al., 2016; Nam and Song, 2017), 본 연구에서는 이에 대한 평가를 하지 않았다.
mod
mod
cos
sin (10) where,
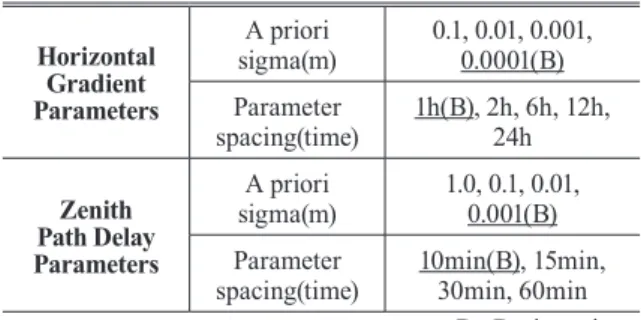
용하였다. 본 논문에서 최적 변수를 결정할 요소는 ZPD와 horizontal gradient이다. ZPD는 천정방향의 대류권 지연량을 의미하며, horizontal gradient는 대류권 지연이 가장 적은 대 류권 천정방향과 기하학적 천정 방향이 일치하지 않는 경우의 천정각의 기울기를 나타낸 것이다. ZPD와 horizontal gradient 요소에서 조정할 수 있는 변수는 a priori sigma와 파라미터 추정 간격(parameter spacing)이며, 이를 이용하여 준실시간 정밀절대측위에 적합한 최적의 변수를 결정한다. Table 3의 (B)는 Bernese의 기본 옵션을 의미한다.
Table 3. Determination of optimal parameters for GNSS PWV Horizontal
Gradient Parameters
A priori
sigma(m) 0.1, 0.01, 0.001, 0.0001(B) Parameter
spacing(time) 1h(B), 2h, 6h, 12h, 24h Zenith
Path Delay Parameters
A priori
sigma(m) 1.0, 0.1, 0.01, 0.001(B) Parameter
spacing(time) 10min(B), 15min, 30min, 60min
※ B : Basic option
3.2 정밀절대측위 처리의 최적 변수 연구 방법 정밀절대측위 준실시간 가강수량 시스템의 최적 변수를 결 정하기 위한 연구의 공간적 범위는 전국의 75개 상시관측소 (Fig. 5)를 이용하여 자료 처리시간을 계산하였다. 시간적 범 위는 2016년 10월 2일부터 4일까지 3일 간 GNSS 자료를 정 밀 위성궤도력을 이용하여 후처리하였다. 산출된 천정방향의 ZTD의 정밀도를 판단하기 위하여 IGS에서 후처리 되어 제 공되는 대전(DAEJ)의 Total Troposphere Zenith Path Delay Product와 산출된 대전의 ZTD 결과를 비교하였다. 또한 수치 예보모델에 적용의 기준이 되는 ZTD의 Standard deviation을 이용하여 정밀도를 분석하였다.
Table 4는 자료처리의 처리 방법 및 주요 초기입력 파일을 나타낸 것이다. 그 중 대류권 지연 추정은 수직좌표에 민감하 게 반응하므로 해양조석하중과 안테나 위상중심변동에 대하 여 모델을 이용하여 보정하였다. 선행연구에 따르면 해양조석 하중을 고려하지 않았을 경우 인천조위관측소를 대상으로 3cm이하의 수직변위오차가 발생하며, 이는 1mm이상의 가강 수량 오차로 직결되는 것을 확인하였다(Park et al. 2007). 그리 고 안테나 위상중심 변동을 고려하지 않는 경우에는 수직방향 으로 10cm 까지 바이어스가 발생할 수 있다(Baek et al, 2006).
Bernese에서 제공하는 기본 변수로 75개의 관측소를 처리 하면 약 18분의 자료처리 시간이 소요되며, 준실시간 시스템
477 의 목표는 10분 간격의 가강수량 정보제공이므로 10분 이내
로 처리되어야 한다. 본 연구에서의 최적 변수란 GNSS 자료 처리시간이 10분 내외이며, 수치예보모델에 적용이 가능한 가강수량 정밀도를 유지하는 것이다.
Table 4. Data processing configuration Processing Engine Bernese 5.2 Data Processing Strategy Precise point
positioning Satellite Ephemeris/Clocks CODE Final
Ionosphere file(ION) CODE ION Reference frame files
(coordinate, velocity) IGS2014 A priori Troposphere/Mapping
Function Model VMF1 Ocean tide loading file(BLQ) FES 2004 Phase center variations(PCV) PCV_COD.I14
3.3 정밀절대측위 처리의 최적 변수 연구 결과 3.3.1 A priori sigma 설정
ZPD의 a priori sigma를 다르게 한 결과 sigma가 커질수 록 자료 처리시간이 증가하는 것으로 Table 5에 나타났으며, Table 5는 GNSS 자료 처리 시간, 3일(Doy of Year 276~278) 간의 자료 처리를 통한 대전 관측소의 ZTD와 IGS에서 제 공되는 대전 관측소의 ZTD 차이의 평균 값, 자료처리 과 정 중 ZTD 추정에 있어 계산된 표준편차의 평균값을 나타 낸다. IGS ZTD와 비교한 결과 1.0m, 0.1m, 0.01m의 경우 비 슷한 경향을 보였다. 그리고 표준편차(STD. DEV : Standard Deviation) 값이 기본 설정 값으로 되어있는 0.001m로 설정 한 결과보다 증가한 것으로 나타나 정밀도가 낮아지는 것으 로 판단되었다.
Horizontal gradient의 a priori sigma를 0.1, 0.01, 0.001, 0.0001m로 다르게 설정한 결과는 Table 6과 같다. Gradient의 a priori sigma를 다르게 한 결과 자료 처리시간에는 영향이 없 었으며, 0.1m와 0.01m로 sigma를 설정한 결과 산출된 ZTD 결과가 같았다. 그리고 gradient의 a priori sigma를 0.001m 이하로 설정하였을 때 IGS ZTD와 비교한 결과가 좋아졌다.
결과적으로 gradient의 a priori sigma를 0.001m 이하로 설정 하는 것이 ZTD의 정밀도를 높게 해주는 것으로 판단되었다.
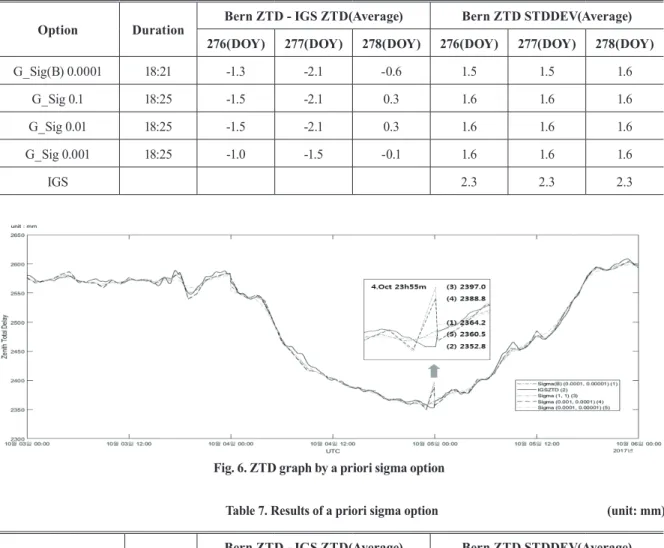
다음은 두 가지 요소 gradient와 ZPD의 a priori sigma를 복합적으로 분석한 결과는 Fig. 6과 Table 7과 같다. 비교는
“ZPD: 1.0m, grad: 1.0m”, “ZPD: 0.01m, grad: 0.001m”, “ZPD:
0.001m, grad: 0.0001m”로 설정하여 비교하였다. A priori sigma 값은 처리 시간에는 크게 영향을 주지 않아 가장 빠 른 자료처리 시간을 위해 parameter spacing을 ZPD는 60분 (min), gradient는 24시간(h)최대로 설정하고 실험하였다.
Fig. 5. Study area
Option Duration Bern ZTD - IGS ZTD(Average) Bern ZTD STDDEV(Average) 276(DOY) 277(DOY) 278(DOY) 276(DOY) 277(DOY) 278(DOY) ZPD_Sig(B) 0.001 18:21 -1.3 -2.1 -0.6 1.5 1.5 1.6
ZPD_Sig 0.01 19:16 -1.5 -0.8 -1.3 2.4 2.4 2.4
ZPD_Sig 0.1 18:36 -1.5 -0.7 -1.3 2.5 2.5 2.5
ZPD_Sig 1.0 19:33 -1.5 -0.7 -1.3 2.5 2.5 2.5
IGS 2.3 2.3 2.3
Table 5. Results of ZPD a priori sigma option (unit: mm)
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 35, No. 6, 471-484, 2017
478
Gradient와 ZPD의 a priori sigma 옵션을 복합적으로 분석 한 결과 Bernese 5.2의 기본 설정인 “ZPD: 0.001m, gradient:
0.0001m”이 일간 불연속 무결성 보완에 효과가 있는 것으로 나타났다. 이러한 결과는 Table 7로는 구분하기 어렵지만 Fig.
6의 확대된 그림을 보면 “ZPD: 0.001m, gradient: 0.0001m”
경우를 제외한 옵션에서는 일간 불연속이 크게 나타나는 것 을 볼 수 있다. 일간 불연속이란 데이터 처리 시간이 다른 날 짜로 변경되는 순간 ZTD의 처리 결과에 급격한 변화(점프)가 Fig. 6. ZTD graph by a priori sigma option
Option Duration Bern ZTD - IGS ZTD(Average) Bern ZTD STDDEV(Average) 276(DOY) 277(DOY) 278(DOY) 276(DOY) 277(DOY) 278(DOY) G_Sig(B) 0.0001 18:21 -1.3 -2.1 -0.6 1.5 1.5 1.6
G_Sig 0.1 18:25 -1.5 -2.1 0.3 1.6 1.6 1.6
G_Sig 0.01 18:25 -1.5 -2.1 0.3 1.6 1.6 1.6
G_Sig 0.001 18:25 -1.0 -1.5 -0.1 1.6 1.6 1.6
IGS 2.3 2.3 2.3
Table 6 . Results of horizontal gradient a priori sigma option (unit: mm)
Option Duration Bern ZTD - IGS ZTD(Average) Bern ZTD STDDEV(Average) 276(DOY) 277(DOY) 278(DOY) 276(DOY) 277(DOY) 278(DOY) Basic(0.001, 0.0001) 18:21 -1.3 -2.1 -0.6 1.5 1.5 1.6
sigma(1, 1) 03:25 -1.2 -1.0 -0.7 1.5 1.5 1.5
sigma(0.01, 0.001) 03:25 -1.2 -1.2 -0.6 1.5 1.5 1.5
sigma(0.001, 0.0001) 03:27 -1.5 -2.4 -0.5 1.2 1.3 1.3
IGS 2.3 2.3 2.3
Table 7. Results of a priori sigma option (unit: mm)
479 나타나는 현상이다. 이는 GNSS 관측 처리의 날짜가 변하면
서 새롭게 적용되는 초기 입력 자료나 GNSS 관측 자료의 영 향으로 볼 수 있다.
3.3.2 Parameter spacing 설정
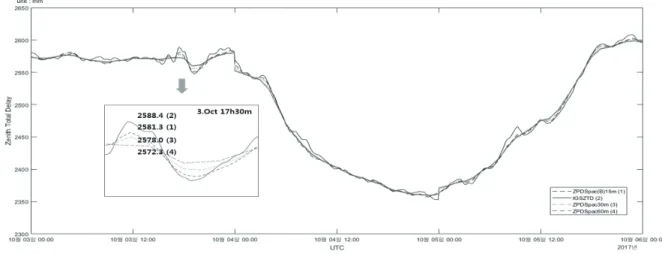
ZPD의 parameter spacing을 15분, 30분, 60분으로 다르 게 설정한 결과는 Fig. 7과 Table 8 같다. ZPD의 parameter spacing을 30분이나 60분으로 할 때, 처리 시간이 많이 줄어 드는 것으로 나타났으며, 정밀도에도 큰 변화는 없었다. Fig. 7 의 확대된 그림을 보면 파선으로 표현된 60분(4)의 경우 천정 방향의 ZTD 결과가 평활화(smoothing) 되었으며, 15분(1)과 30분(3) 파선이 IGS ZTD(2) 실선 결과와 유사해지는 것으로 나타났다. Parameter spacing 시간 간격이 짧아지는 경우 IGS 결과와 유사해지는 것을 볼 수 있다. 이를 통하여 parameter spacing의 최적 옵션은 horizontal gradient는 6시간 이하, ZPD는 30분 이하로 설정하는 것이 높은 정밀도와 10분이내
의 처리 시간을 유지할 수 있는 것으로 판단되었다.
Horizontal gradient의 parameter spacing을 1시간, 2시간, 6 시간, 12시간, 24시간으로 다르게 설정한 결과는 Table 9와 같 다. Horizontal gradient의 parameter spacing을 24시간으로 설정한 결과 처리 시간이 18분에서 8분으로 빨라지는 것이 확 인되었다. 파라미터의 추정 간격이 길어지면 처리시간이 빨라 지는 것을 확인 할 수 있으며, 2시간 이상의 간격을 적용해야 10분 안의 처리가 가능했다. ZTD의 정밀도는 6시간 이전의 간격에서 좋아지는 것으로 나타났다(Table 9).
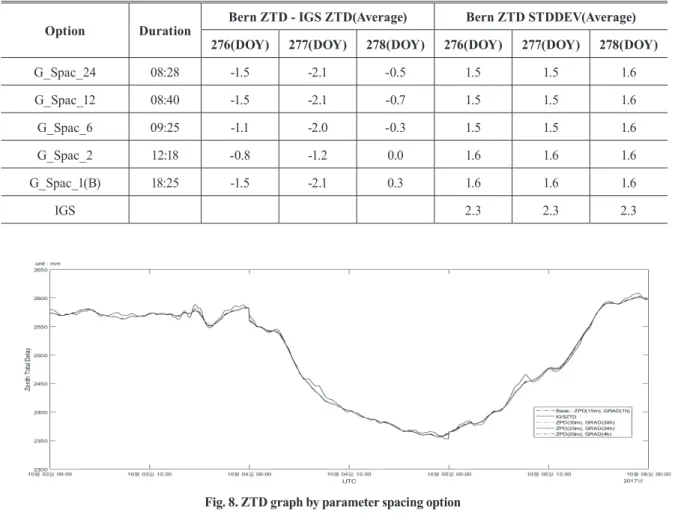
3.3.3 최적 변수 설정
위의 ZPD와 horizontal gradient의 a priori sigma와 parameter spacing 변수를 설정 실험을 기반으로 Table 10과 같이 최종 실험을 수행하였다. 실험결과 horizontal gradient의 parameter spacing을 4시간으로 설정하는 것이 정밀도와 처리 시간 측면에서 적절하였으며, ZPD의 경우 parameter spacing
Fig. 7. ZTD graph by ZPD parameter spacing option
Option Duration Bern ZTD - IGS ZTD(Average) Bern ZTD STDDEV(Average) 276(DOY) 277(DOY) 278(DOY) 276(DOY) 277(DOY) 278(DOY) ZPD_Spac(B) 15m 18:21 -1.3 -2.1 -0.6 1.5 1.5 1.6
ZPD_Spac 30m 08:05 -1.3 -2.3 -0.5 1.3 1.4 1.4
ZPD_Spac 60m 05:39 -1.3 -2.5 -0.4 1.2 1.3 1.3
IGS 2.3 2.3 2.3
Table 8. Results of ZPD parameter spacing option (unit: mm) (unit: mm)
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 35, No. 6, 471-484, 2017
480
Option Duration Bern ZTD - IGS ZTD(Average) Bern ZTD STDDEV(Average) 276(DOY) 277(DOY) 278(DOY) 276(DOY) 277(DOY) 278(DOY) BASIC(ZPD 15m,
GRAD 1h) 18:21 -1.3 -2.1 -0.6 1.5 1.5 1.6
ZPD 30m,
GRAD 24h 04:09 -1.5 -2.3 -0.5 1.3 1.4 1.4
ZPD 20m,
GRAD 24h 05:38 -1.4 -2.2 -0.5 1.3 1.4 1.4
ZPD 20m,
GRAD 4h 06:39 -1.4 -2.2 -0.6 1.4 1.5 1.5
IGS 2.3 2.3 2.3
Table 10. Results of parameter spacing option Fig. 8. ZTD graph by parameter spacing option
Option Duration Bern ZTD - IGS ZTD(Average) Bern ZTD STDDEV(Average) 276(DOY) 277(DOY) 278(DOY) 276(DOY) 277(DOY) 278(DOY)
G_Spac_24 08:28 -1.5 -2.1 -0.5 1.5 1.5 1.6
G_Spac_12 08:40 -1.5 -2.1 -0.7 1.5 1.5 1.6
G_Spac_6 09:25 -1.1 -2.0 -0.3 1.5 1.5 1.6
G_Spac_2 12:18 -0.8 -1.2 0.0 1.6 1.6 1.6
G_Spac_1(B) 18:25 -1.5 -2.1 0.3 1.6 1.6 1.6
IGS 2.3 2.3 2.3
Table 9. Results of horizontal gradient parameter spacing option (unit: mm)
(unit: mm)
481 은 20분이 적절한 것으로 나타났다. 아래 Fig. 8은 최적 변수를
설정하기 위한 최종 실험의 ZTD 결과를 나타낸 것이다.
위의 실험 결과 horizontal gradient와 ZPD의 a priori sigma, parameter spacing의 최종적으로 결정된 최적 변수는 Table 11과 같다.
4. 준실시간 GNSS 가강수량 시스템 개발 및 정밀도 분석
4.1 정밀절대측위를 이용한 준실시간 가강수량 시스템 개발
정밀절대측위의 최적 변수 실험 결과를 바탕으로 준실시 간 GNSS 가강수량 시스템을 개발하였다. 가강수량 시스템 서버는 자료처리 임무를 수행하므로 안정성과 속도가 가장 중요한 요소이며, 이를 위한 PPP 서버를 구축하였다. 서버의 운영체제는 CentOS(The Community ENTerprise Operating System) 리눅스(linux)계 운영체제를 이용하였다. 서버에 설 치된 프로그램으로는 Bernese 5.2이며, 준실시간 가강수량을 산출하기 위한 개발언어로는 쉘(shell) 스크립트, 펄(perl) 스 크립트, 포트란(fortran)이 사용되었다. 각 언어의 기능으로는 펄 스크립트는 Bernese 실행과 관련된 프로그램 언어로 기존 의 스크립트를 수정하여 준실시간 시스템에 적합한 처리 결 과 및 옵션을 실행한다. 포트란은 Bernese에서 산출된 대류 권 지연을 이용하여 가강수량을 계산하도록 설계하였다. 쉘 스크립트는 펄 스크립트와 포트란 파일을 자동적으로 실행 하는 역할을 한다. 시스템의 구조는 기존의 상대측위를 이용 한 가강수량 시스템을 유지하도록 설계되었다. Fig. 10는 최 종적으로 설계된 가강수량 시스템 그림이다. Fig. 10에 나타 난 DPR(Data Processing Server)은 상대측위를 이용한 자료 처리를 실시하는 서버이다. DRS(Data Receive and Service Sever)는 자료의 수집과 저장을 수행하는 서버이며, GNSS 처 리에 필요한 초기 입력 파일 RINEX, 위성 궤도력 파일 등을 FTP나 NTRIP으로 제공받는다. 또한 DPR과 PPP 서버에서 산출된 가강수량 결과를 저장한다. TEV(Test and Evaluation
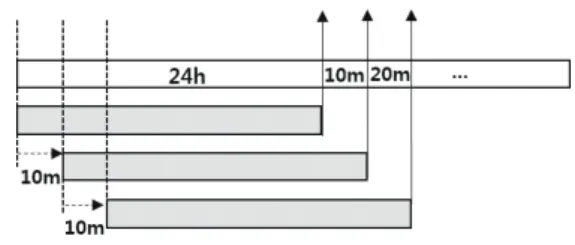
Server)는 TEST 서버의 역할과 DPR 또는 PPP 서버에 문제 가 발생하였을 때 대체 서버로 사용된다. 이 논문에서 개발한 것은 PPP 서버로 정밀절대측위를 이용하여 가강수량을 산출 하고 DRS에 가강수량 결과를 전달한다. 준실시간 GNSS 자 료 처리는 Fig. 9와 같이 sliding window 방법을 이용하여 10 분 간격의 가강수량을 산출하였다(Baek et al. 2007). 자료 처 리에 사용된 위성궤도력과 지구회전파라미터(Earth rotation parameter)는 IGS의 ultra-rapid를 이용하였다.
4.2 정밀절대측위를 이용한 준실시간 가강수량 정밀도 분석
정밀절대측위를 이용한 가강수량 산출 시스템의 가강수량 을 상대측위 방식의 준실시간 가강수량과 비교하여 정밀도를 분석하고, 각 방식의 장·단점을 분석하였다.
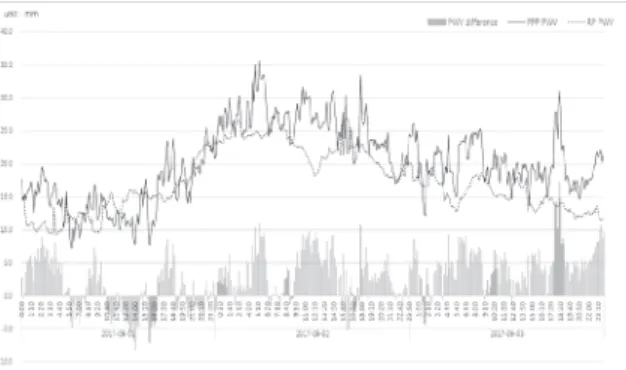
첫 번째로는 상대측위 방식의 준실시간 가강수량과 정밀 절대측위 방식의 준실시간 가강수량을 비교하였다. 비교대 상 관측소는 대전 상시관측소를 이용하였으며, 비교 기간은 2017년 9월 1일부터 9월 3일까지 3일간의 준실시간 가강수량 결과를 비교하였다. 두 가지 방식으로 같은 시간에 산출된 가 강수량 차이의 평균은 2.9mm이며, 표준편차는 3.9mm이다.
가강수량 차이가 가장 큰 경우로는 17.3mm의 차이가 발생하 였다. 아래 Fig. 11은 두 가지 방식의 가강수량을 비교한 그림 Horizontal
Gradient Parameters
A priori sigma(m) 0.001m Parameter spacing(time) 4 hour Zenith
Path Delay Parameters
A priori sigma(m) 0.0001m Parameter spacing(time) 20 min Table 11. Results of optimal parameters for GNSS PWV
Fig. 9. Sliding windows (Baek et al, 2007)
Fig. 10. Near real-time GNSS PWV system
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 35, No. 6, 471-484, 2017
482
으로 실선은 정밀절대측위 방식을 파선은 상대측위 방식의 가강수량을 나타내며, 막대그래프는 가강수량의 차이를 나 타낸 것이다. 그래프에 따르면 정밀절대측위 방식의 실선 그 래프는 상대측위 보다 가강수량이 급격하게 변동하는 것으 로 나타났다.
다음은 수치예보모델에 입력되는 GNSS 가강수량 자료 의 품질관리(QC : Quality Control) 기준이 되는 ZTD의 standard deviation을 비교하였다. QC는 수치예보모델에 적 용하기 위한 자료 품질을 나타내는 것으로 초기 입력자료가 향후 일기예보에 심각한 영향을 줄 정도로 큰 오차를 포함하 고 있는지를 탐지하기 위한 품질검사 과정이다. GNSS 가강수 량의 품질기준은 여러 가지 실험을 통하여 ZTD의 standard deviation 5.0이하의 가강수량 자료가 수치예보모델에 초기 입력 자료로 좋은 품질인 것으로 나타났으며, 9월 1일부터 3 일까지의 대전 상시관측소의 standard deviation은 Fig. 12과 같다. 상대측위는 대부분 standard deviation 5.0 이하인 QC 1 의 결과를 보였으며, 정밀절대측위는 5.0에서 10.0을 나타내 는 QC 2 구간에 많이 존재하는 것을 알 수 있다. 분석 결과 정 밀절대측위 방식의 가강수량이 낮은 정밀도를 나타냈다.
Table 12는 위의 Fig. 11과 12의 결과를 표로 나타낸 것이 다. 정밀절대측위(PPP)의 ZTD의 standard deviation은 상대 측위(RP)보다 평균이 약 1mm 정도로 높았으며, 표준편차도 더 큰 결과를 나타냈다.
4.3 절대정밀측위를 이용한 준실시간 가강수량 시스템 분석
위의 실험을 통하여 정밀절대측위를 이용한 준실시간 가강 수량 산출결과는 상대측위 방법보다 가강수량 정밀도가 낮 은 것으로 판단되었다. 그러나 상대측위 방식과 다르게 정밀 절대측위 방식은 다른 GNSS 상시관측소의 영향을 받지 않 기 때문에 GNSS 가강수량 산출의 무결성을 유지해 줄 수 있 는 방안으로 활용성이 있다(Fig. 3 and Fig. 4). 그러므로 향후 에는 정밀절대측위 방식의 정밀도를 높이는 방안의 연구가 필 요하며, 이를 위해 GNSS 자료의 분산처리 및 정밀절대측위로 구축된 해외사례 분석이 필요할 것으로 사료된다.
5. 결 론
본 논문에서는 정밀절대측위(PPP) 방식을 이용한 준실시 간 GNSS 가강수량 산출 시스템 개발을 목적으로 GNSS 처 리 프로그램의 대류권 지연 추정과 관련된 최적 변수를 결정 하였다. 그리고 정밀절대측위 방식의 GNSS 가강수량 산출 시 스템을 개발하여 상대측위(RP) 방식의 가강수량과 비교하였 다. 연구 결과를 요약하면 다음과 같다.
전국 GNSS 상시관측소를 대상으로 매 10분 단위의 정밀 한 가강수량을 추정하기 위하여 대류권 지연 추정과 관련된 zenith path delay와 horizon gradient 변수의 a priori sigma 값과 parameter spacing 시간을 결정하였다. 최적 변수 결정 을 위한 실험은 국내 75개 상시관측소의 3일간 GNSS 자료를 PPP로 후처리하였다. 정밀도는 IGS에서 발표되고 있는 대전 상시관측소 zenith total delay 결과와 수치예보모델의 품질 관 리에 이용되고 있는 ZTD의 standard deviation 값을 이용하였 다. 추가적으로 ZTD 그래프를 통한 일간 불연속을 분석하였 Fig. 11. Comparison of PPP PWV and RP PWV(Daej)
Fig. 12. Comparison of PPP ZTD Std.dev and RP ZTD Std.dev(Daej)
DifferencePWV
Standard PPP deviation
Standard RP deviation
Average 2.9 4.9 4.0
Standard
deviation 3.9 1.1 0.5
Table 12. Comparison of PPP and RP(Daej) (unit: mm)
483 다. 분석 결과 zenith path delay의 a priori sigma는 0.0001m,
parameter spacing은 20분 간격, horizon gradient의 a priori sigma는 0.001m, parameter spacing은 4시간 간격으로 대류 권 지연을 추정하는 것이 준실시간 가강수량 시스템을 위한 최적 변수로 결정되었다.
위의 실험 결과를 바탕으로 정밀절대측위 방식의 준실시 간 GNSS 가강수량 시스템을 개발하였다. 개발된 시스템의 정밀도를 분석하기 위하여 대전 상시관측소에 대한 두 가지 측위방식의 가강수량을 비교하였다. 그리고 ZTD의 standard deviation을 이용하여 절대정밀측위 시스템의 정밀도를 분석 하였다. 분석 결과 상대측위 방식이 정밀도가 높은 것으로 나 타났으나 시스템 테스트 기간 중 상대측위의 경우 다른 관측 소의 영향을 받아 가강수량이 산출되지 않는 경우가 발생하 였다. 가강수량이 산출되지 않는 동일 시간에 정밀절대측위 방식의 가강수량은 문제가 있는 관측소를 제외하고 가강수량 이 산출되었다. 그러므로 정밀절대측위 방식은 가강수량의 무 결성을 유지해 줄 수 있는 방안으로 판단되었다.
향후에는 준실시간이나 실시간 정밀절대측위의 대류권 지연 산출물의 정밀도를 높이는 연구가 필요할 것이다. 또한 GNSS 가강수량 정보를 수치예보모델에 적용하여 그 효과를 분석하는 연구가 다양하게 이루어져야 할 것으로 사료된다.
감사의 글
본 연구는 한국과학기술정보연구원에서(과학기술정보통 신부) 수행하는 ‘초고성능컴퓨팅기반 국가현안 대응체계 구 축’사업의 공동연구로 수행되었습니다.
References
Baek, J., Lee, J., Choi, B., and Jo, J. (2007), Processing strategy for near real time GPS precipitable water vapor retrieval, Journal of Astronomy and Space Sciences, Vol.
24, No. 4, pp. 275-284.
Baek, J., Lim, H., Jo, J., Cho, S., and Cho, J. (2006), An analysis of the effect on the data processing of Korea GPS network by the absolute phase center variations of GPS antenna, Journal of Astronomy and Space Sciences, Vol.
23, No. 4, pp. 385-396.
Bevis, M., Businger, S., Herring, T.A., Rocken, C., Anthes, R.A., and Ware, R.H. (1992), GPS meteorology: Remote
sensing of atmospheric water vapor using the global positioning system, Journal of Geophysical Research:
Atmospheres, Vol. 97, No. D14, pp. 15787-15801.
Dach, R., Lutz,S., Walser, P., and Fridez, P. (2015), Bernese GPS Software Version 5.2, Astronomical Institute, University of Bern, Switzerland.
Douša, J. and Bennitt, G. (2013), Estimation and evaluation of hourly updated global GPS zenith total delays over ten months, GPS Solutions, Vol. 17, No. 4, pp. 453–464.
Elgered, G., Davis, J.L., Herring, T.A., and Shapiro, I.I.
(1991), Geodesy by radio interferometry: Water vapor radiometry for estimation of the wet delay, Journal of Geophysical Research, Vol. 96, No. B4, pp. 6541-6555.
Guerova, G., Jones, J., Dousa, J., Dick, G., de Haan, S., Pottiaux, E., Bock, O., Pacione, R., Elgered, G., Vedel, H., and Bender, M. (2016), Review of the state of the art and future prospects of the ground-based GNSS meteorology in Europe, Atmospheric Measurement Techniques, Vol. 9, No. 11, 5385.
Ha, J. (2014), Development of time-dependent mean temperature equations for GPS meteorology, Journal of Positioning, Navigation, and Timing, Vol. 3, pp. 143-147.
Kim, H. and Bae, T. (2017), GNSS precipitable water vapor and meteorological factors for selection of precipitation prediction algorithm based on deep learning, KSCE 2017 Conference, 18-20, Oct. Pusan, Korea, Vo1. 1, pp. 7-8. (in Korean)
Kim, J. and Bae, T. (2015), Comparative analysis of GNSS precipitable water vapor and meteorological factors, Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 33, No. 4, pp. 317-324.
Lee, J., Cho, J., Baek, J., and Park, J. (2007), Analysis on GPS PWV effects as an initial input data of NWP model, Journal of Astronomy and Space Sciences, Vol. 24, No. 4, pp. 285-296.
MOIS (2016), Statistical yearbook of natural disaster, MOIS, Sejong, Korea.
Nam, J. and Song, D. (2015), Remote sensing of GPS precipitable water vapor during 2014 heavy snowfall in gang-won province, Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 33, No. 4, pp. 305-316.
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 35, No. 6, 471-484, 2017
484
Nam, J. and Song, D. (2017), Systematic analysis of precipitable water vapor estimating using GPS, KSCE 2017 Conference, 18-20, Oct., Pusan, Korea, Vol. 1, pp.
45-46. (in Korean)
Park, H., Yoo, S., Yoon, H., Chung, J., and Cho, J. (2016), Performance analysis of mapping functions and mean temperature equations for GNSS precipitable water vapor in the Korean peninsula, Journal of Positioning, Navigation, and Timing, Vol. 5, No 2, pp. 75-85.
Park, K., Won, J., Kim, H., and Lim, K. (2007), Analysis of crustal deformation due to ocean tide loading, Journal of Astronomy and Space Sciences, Vol. 24, No. 3, pp. 249- 260.
Schuler, T. (2001), On Ground-based GPS Tropospheric Delay Estimation, Ph.D. dissertation, Universitat der Bundeswehr, Munchen, Germany, pp 247-250.
Song, D. and Grejner-Brzezinska, D. (2009), Remote sensing of atmospheric water vapor variation from GPS measurements during a severe weather event, Earth, Planets and Space, Vol. 61, No. 10, pp. 1117-1125.
Webb, F.H. and Zumberge, J.F. (1993), An Introduction to the GIPSY/OASIS-II, JPL Publication, Pasadena, California, USA.
Yoon, H. (2015), Determination of Ocean Tide Loading Constituents Using GPS Measurements at Tidal Station, Ph.D. dissertation, University of Seoul, Seoul, Korea, pp.
62-66. (in Korean with English abstract)