다수의 무인운송플랫폼 운용을 위한 센서 네트워크 시스템
Sensor Network System to Operate Multiple Autonomous Transport Platform
남 춘 성, 김 수 현, 이 석 한, 신 동 렬
*
(Choonsung Nam
1, Suhyeon Gim
1, Sukhan Lee
1, and Dongryeol Shin
1)
1
SungKyunKwan University
Abstract: This paper presents a sensor network and operation for multiple autonomous navigation platform and transport service.
Multiple platform navigate with inside sensors and outside sensors while acquiring and process some useful information. Each platform communicates each other by navigational information through central main server. Efficient sensor network systems are considered for the scenario which some passengers call the service and the vehicle accomplish its transport service by transporting each caller to the destination by autonomous manners. In the scenario, all vehicles perform a role of sensor system to the central server and the server handles each information and integrate with faster procedure in the wireless 3G network.
Keywords: sensor networks, autonomous navigation vehicle, sensor data fusion, vehicle communication
Copyright© ICROS 2012
I. 서론
주행시 운전자 주행보조 및 안전기능 외에 운전자가 없 이 자동으로 목적지까지 운송하는 무인운송시스템의 연구 도 이루어지고 있다. 이는 대중교통과 개인 및 화물운송 서 비스를 목적으로 지능형 운송 시스템(intelligent transporta- tion system) 과 연관되며, 미국, 유럽 및 일본 등 선진국에 서 핵심 요소기술과 상용화 기술을 보유하고 있다. 최근 무 인주행 분야에 있어서 세계적 기술을 보유하고 있는 Carnegie Mellon University의 Robotics Institute 에서는 Navlab 을 개발하면서 일반도로와 고속도로 및 도로외 구 간에 걸친 무인주행과 주행보조 시스템, 도심의 혼잡지역에 도 무인주행이 가능하도록 보행자 인식, 환경인식 등 연구 를 수행하고 있으며 DARPA urban challenge 대회에서 6시 간 안에 약 100 Km를 무인주행 완주하기도 하였다[1].
Google 의 무인주행차(driverless car) 는 Google street view 와 Lidar, radar 및 odometry 센서를 이용하여 2010년도에 1600 Km의 무인주행성능을 보여주었다[2].
일반적인 센서[3,4]와 달리 차량용 센서들은 특정한 목적 을 수행하기 위해 지속적인 전원공급, 안정적인 데이터 수 집을 위해 미리 형성된 차량 내부 네트워크, 다양한 목적에 맞는 다양한 센서들로 이루어진다[5,6]. 이러한 차량용 센서 를 활용한 차량 시스템은 단지 차량 내에서만 국한되어 차 량내 발생하는 데이터만을 이용하여 무인자동차의 자동주
* 책임저자(Corresponding Author)
논문접수: 2012. 5. 15., 수정: 2012. 6. 14., 채택확정: 2012. 6. 30.
※ 본 과제는 경기도 첨단기술국제공동연구사업의 사업비지원(과 제번호(I091003))에 의해 수행되었음.
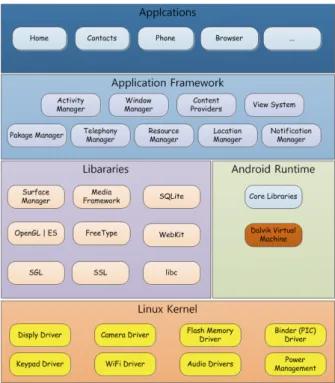
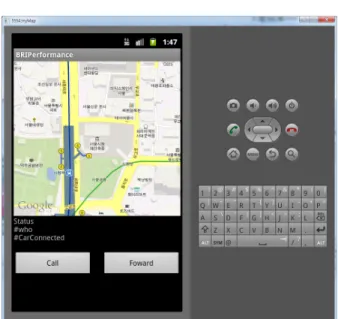
행을 연구하였다. 하지만 갑작스럽게 발생하는 도로상의 사 고, 정체, 체증, 차량의 도난, 위험, 주행정보를 알 수 없기 때문에 이에 대한 대비는 차량 각자 이러한 상황을 직접 감지할 경우에만 대처할 수 있다. 따라서 본 논문은 차량의 센서들 데이터를 수집, 관리하여 내부 차량에서 사용되는 센서 데이터와 외부 차량에서 사용되는 센서 데이터를 구 분하여 전체 도로의 지도 및 상황을 인지 할 수 있는 자주 적 네비게이션 차량을 지원하기 위한 센서 네트워크 시스 템을 제안한다. 이를 위해 센서에서 수집되는 데이터를 처 리하기 위해서 OSGi 프레임워크를 통한 차량내 센서 데이 터 수집 및 외부 차량 간 통신을 위한 싱크 노드를 구현하 여 차량이 하나의 작은 센서 네트워크를 구성하며, 전체 차 량의 데이터 수집, 관리를 위한 차량 관리 서버를 구성하여 차량 및 외부 사용자에게 신뢰성 있는 정보를 제공한다. 외 부 사용자는 차량 정보를 위한 인터페이스 제공을 위해 Android 프레임 워크를 이용한다.
본 논문은 II 장에서 기존 차량에서 센서가 수집되고 처 리되는 방법 및 싱크 노드 구성을 위한 OSGi 프레임 워크 와 외부 사용자를 위한 Android 프레임 워크에 대해서 알 아본다. III 장에서는 제안하는 센서 네트워크에 대해 서술 한다. IV 장에서는 구현된 차량 및 네트워크 시스템에 대해 알아보고, V 장에서 결론을 맺는다.
II. 관련연구 1. 무인 운송 플랫폼을 위한 센서 시스템
무인 운송 플랫폼을 위한 센서 시스템은 차량내부 정보 와 외부의 정보 용도로 구분할 수 있다. 차량내부센서의 정 보(odometry)는 구동축과 조향축에 관한 엔코더, 즉 각 축의 회전각도와 각속도 정보이며, 이를 통하여, 차량의 주행거 리, 주행속도와 선회방향, 선회속도 등을 추정할 수 있다.
차량외부센서의 정보는 무인주행 또는 주행 보조 및 안전