논문 2015-52-6-19
의사위성을 이용한
광역보정정보 전송시스템에 대한 실시간 시험
( Real-time Experiments of WA-DGNSS Transmission System using Pseudolite )
권 금 철*, 심 덕 선***
( Keum-Cheol Kwon and Duk-Sun Shim
ⓒ)
요 약
본 논문에서는 의사위성을 이용하여 실시간 광역보정정보 시스템 구축 및 전송 실험에 대한 내용을 다루고 있다. 실험을 위 하여 의사위성을 제작하고 중앙처리국과 의사위성간 광역보정정보 송수신을 위한 서버/클라이언트 프로그램을 구현하여 데모 시스템을 구축하였다. 그리고 소프트웨어 GPS 수신기와 하드웨어 GPS 수신기, 일반 자동차 네비이션을 이용하여 광역 보정정 보 시스템 성능을 확인하였다. 그 결과로 중앙처리국과 클라이언트간 보정정보 전송후 의사위성을 이용하여 신호를 방사한 결 과 이상없이 보정정보가 전송되는 것과 보정정보를 이용한 결과 사용자 위치 에러가 감소되는 것을 확인할 수 있었다.
Abstract
This paper presents the real-time experiments of WA-DGNSS transmission system using a pseudolite and shows the performance of WA-DGNSS. We implement a server/client program to receive the WA-DGNSS data from the master station, and fabricate a pseudolite to transmit the WA-DGNSS data to users. The performance of the WA-DGNSS transmission system is tested by software and hardware GPS receivers, respectively. The experiments show that the WA-DGNSS data is well transmitted to GPS receivers without errors and thus WA-DGNSS works well.
Keywords : GPS, pseudolite, WA-DGNSS, DGNSS
Ⅰ. 서 론
광역보정정보시스템(Wide Area Differential GNSS) 이란 GNSS(GPS, GLONASS등)의 항법 성능을 개선하
* 학생회원, ** 정회원, 중앙대학교 전자전기공학부 (Dept. of Electrical and Electronics Engineering, Chung-Ang Univerity)
ⓒ Corresponding Author(E-mail: [email protected])
※ 본 논문은 2013년 해양수산부 소관 연구개발사업의 연구비 지원 및 2014년 중소기업청에서 지원하는 산학연 공동기술개발 사업(No.C0212929)의 연구 지 원으로 수행되었습니다.
Received ; January 30, 2015 Revised ; May 31, 2015 Accepted ; March 26, 2015
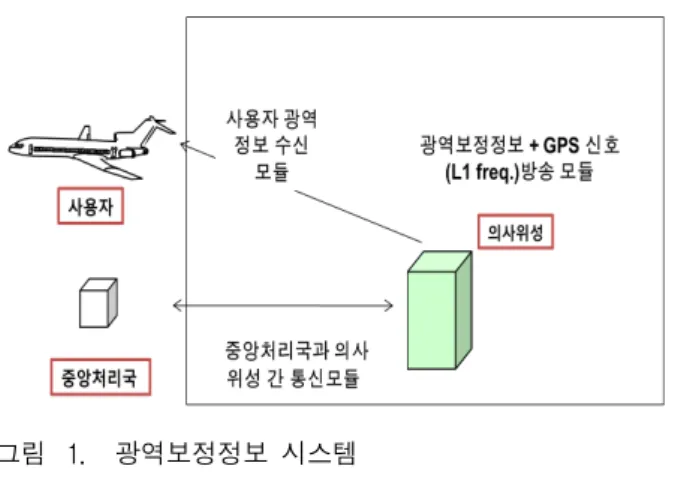
기 위하여 보정정보를 GNSS 사용자에게 전송하는 시 스템으로 광역기준국, 중앙처리국, 광역보정위성으로 구 성된다. 광역기준국은 GNSS 위성으로부터 신호를 수신 하여 수신된 데이터의 이상 유무를 검사한 후 중앙처리 국으로 전송하며 중앙처리국은 전송된 데이터들을 이용 하여 보정정보를 생성한 후 광역보정위성으로 전송한 다. 광역보정위성은 수신된 보정정보를 GNSS 수신기에 전송하며 GNSS 수신기에서는 이를 이용하여 항법 오 차를 보정한다. 그림 1은 광역보정정보 시스템 적용 환 경을 보여주고 있다.
오늘날 세계 여러 나라에서는 이미 광역보정정보시 스템을 구축하여 서비스를 제공하고 있으며[1∼3] 국내에
그림 1. 광역보정정보 시스템 Fig. 1. Wide Area Differential GNSS.
서도 국가적 차원에서 광역보정정보시스템을 구축하기 위한 연구를 지원해오고 있다[4].
의사위성이란 우주상공의 GPS 위성과는 달리 지상이 나 비행체에 설치되어 GPS 위성과 같이 거리를 측정할 수 있는 ranging 신호를 전송하며, 반송파 주파수 및 데이터 신호가 GPS 위성 신호와 동일한 구조를 가진 시스템이다. 이러한 의사위성을 사용하면 GPS의 오차 요인인 이온층 오차 등이 제거되므로 보다 정확한 수신 기의 위치를 측정할 수 있다. 그러나 의사위성으로부터 수신기까지 전파의 도달거리가 직선이어야 하며 전파의 도달 세기가 일정해야 하는 문제점을 안고 있다. 또한, 정확한 수신기의 위치를 측정하기 위해서는 의사위성과 사용자 수신기의 클럭이 동기화가 되어야 하기 때문에 이를 위한 별도의 기법이 필요하다. 그리고 의사위성의 클럭은 GPS에 비하여 안정도가 떨어지므로 장시간 사 용할 경우 이에 대한 보완책이 필요하다. 이러한 여러 가지 이유로 인하여 현재는 주로 항공기의 자동 이착륙 에 적용하기 위한 연구가 진행되고 있으며, 미국에서는 FAA(Federal Aviation Administration)에서 만든 Category I, II, III의 규정을 만족시키는 시스템으로 연 구가 진행되고 있다.
의사위성을 이용하면 GPS와의 간섭을 피하기 위하 여 GPS 위성용 코드와 다른 코드를 사용함으로써 GPS 위성을 대체 또는 보완하는데 활용할 수 있으며 GPS 위성에 비하여 매우 저렴한 비용으로 정확성 (Accuracy), 무결성(Integrity), 가용성(Availability) 등 을 향상시킬 수 있는 등 여러 장점들이 있기에 항공기 응용분야 뿐만 아니라 다양한 분야에 적용을 하기 위한 연구가 활발히 진행되고 있다.
본 논문에서는 자체 제작한 광역보정정보 전송을 위
한 의사위성(WPL: WADGNSS PseudoLite)을 사용하 여 광역보정정보시스템 데모 실험을 수행하였으며 실험 을 위하여 광역보정정보 서버와 의사위성간 통신을 위 한 서버/클라이언트 프로그램을 구현하여 유선랜과 무 선랜 환경에 대하여 실험을 하여 결과를 분석하였다.
본 논문에서는 데모 실험을 구축하기 위한 세부적인 자세한 기술보다는 전체적인 구성과 실험 결과에 초점 을 맞추어 기술한다.
Ⅱ. 본 론
1. 의사위성을 이용한 광역보정정보 방송 모듈 구현 본 논문에서 구현한 광역보정정보 방송용 의사위성 방송 모듈(WPL(Wide Area GNSS Pseudolite))은 크게 디지털 파트, RF 파트 그리고 전원 파트로 나누어진다.
디지털 파트는 마이크로 컨트롤러와 FPGA 파트로 나 누어지고 RF 파트로는 주파수 합성기(synthesizer), 감 쇠기(attenuator) 그리고 RF 스위치로 나누어진다. 그림 2는 WPL의 블록도를 보여주고 있다.
RF 파트는 단순 의사위성 부분으로서 기준 주파수 (16.368MHz)로부터 주파수 합성기를 통하여 GPS의 L1 반송 주파수(1575.42MHz)를 생성하는 부분, 반송파와 대역 확산된 광역보정정보를 합성하는 부분, 그리고 출 력 신호의 크기와 펄싱을 조절하는 부분으로 이루어진 다. 디지털 파트는 WPL의 주 모듈로서 FPGA에서는
그림 2. WPL의 블록도 Fig. 2. Block diagram of WPL
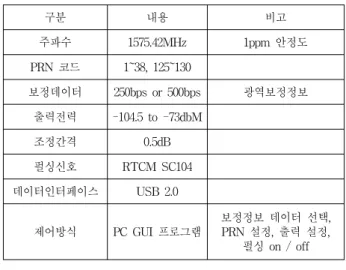
구분 내용 비고
주파수 1575.42MHz 1ppm 안정도
PRN 코드 1~38, 125~130
보정데이터 250bps or 500bps 광역보정정보 출력전력 -104.5 to -73dbM
조정간격 0.5dB
펄싱신호 RTCM SC104 데이터인터페이스 USB 2.0
제어방식 PC GUI 프로그램
보정정보 데이터 선택, PRN 설정, 출력 설정,
펄싱 on / off 표 1. WPL 설계 사양
Table 1. WPL specification.
GPS의 C/A 의사 잡음 코드와 광역보정정보를 modulo-2 연산을 통하여 합성한 후 이를 BPSK 변조 장치인 믹서로 출력하는 역할을 담당하며 마이크로 컨 트롤러에서는 출력신호의 파워를 조절하기 위한 소자인 감쇠기 제어 신호와 펄싱을 위한 소자인 RF 스위치의 On/Off 제어 신호를 출력한다. 또한 주파수 합성기의 내부 레지스터 설정값을 조절하여 발진 주파수를 제어 하는 역할을 한다. 본 논문에서 구현한 WPL은 일반 50bps 데이터가 아닌 250bps 또는 500bps 보정정보를 처리하기 위한 구조로 되어 있으며 신호 펄싱은 RTCM SC-104를 적용하였다. 표 1은 설계한 WPL의 요구조건 사항을 보여주고 있다.
2. 서버/클라이언트 프로그램 구현
광역보정정보 수신을 위해서는 보정정보를 요청하기 위한 클라이언트 프로그램과 요청에 따라서 이를 전송 하기 위한 서버 프로그램이 필요하다.
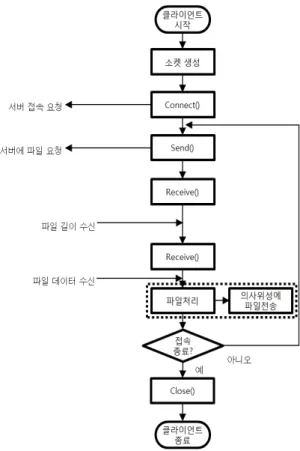
그림 3은 서버 프로그램의 순서도를 나타낸 것으로 서버는 클라이언트로부터 보정정보 파일 요청 메시지를 전달받으면 보정정보가 담겨져 있는 최근 파일을 알고 리즘에 따라 선택하게 되고 이후 선택된 파일의 길이와 파일 데이터를 클라이언트에 전송한다. 만약 클라이언 트에서 에러가 발생하여 중단을 하면 서버는 클라이언 트의 다음 접속을 기다리기 위해 초기 소켓 생성단계로 되돌아간다.
클라이언트 프로그램은 서버에 파일을 요청하며 받 은 파일을 의사위성을 통해 방사하기 위한 데이터 변환 작업을 한 다음에 의사위성에 전송한다. 이를 위해 타
그림 3. 서버 프로그램 순서도
Fig. 3. Flow diagram of server program.
그림 4. WPL 클라이언트 스레드 구성도 Fig. 4. Thread diagram of WPL client.
이머를 통해 매초마다 서버에 파일을 요구하는 방식으 로 구현되었고 파일 수신과 의사위성 전송 스레드는 분 리되어 있다. 그림 4는 클라이언트 프로그램의 스레드 구성도를 보여주고 있다.
클라이언트는 서버에 접속하기 위해 먼저 소켓을 생 성한다. 그 후 서버에 접속하고 서버에 보정정보 파일 요청을 알린다. 파일요청 이후 클라이언트는 파일 길이 와 데이터를 수신하며 수신된 파일을 디코딩한 후 이를 GNSS 수신기에 적용시켜서 항법 정보를 보정한다.
그림 5는 클라이언트 프로그램의 순서도를 보여주고 있다.
그림 5. 클라이언트 프로그램 순서도 Fig. 5. Flow diagram of client program.
3. 데모 실험을 위한 구성
그림 6은 광역보정정보시스템 데모 실험을 위한 전 체적인 구성도로서 크게 중앙처리국과 WPL로 구성되 며 이 둘의 통신은 서버와 클라이언트간의 네트워크 통 신으로 이루어진다. 서버는 클라이언트로부터 보정정보 파일 요청 메시지를 전달받으면 보정정보가 담겨져 있 는 최근 파일을 알고리즘에 따라 선택하게 되고 이후
그림 6. 광역보정정보 시스템 데모 실험을 위한 구성 Fig. 6. Experimental environment of WA-DGNSS demo.
선택된 파일의 길이와 파일 데이터를 클라이언트에 전 송한다. 만약 클라이언트에서 에러가 발생하여 중단을 하면 서버는 클라이언트의 다음 접속을 기다리기 위해 초기 소켓 생성단계로 되돌아간다.
클라이언트는 서버에 접속하기 위해 먼저 소켓을 생 성한다. 그 후 서버에 접속하고 서버에 보정정보 파일 요청을 알린다. 파일요청 이후 클라이언트는 파일 길이 와 데이터를 수신하며 수신된 파일을 처리하여 의사위 성에 전송하며 의사위성은 500bps의 광역보정정보 데 이터에 대해서 대역확산 변조 후 GPS와 동일한 L1 주 파수로 방송한다.
Ⅲ. 광역보정정보 시스템 데모 실험 결과
1. 서버/클라이언트 프로그램 통신 실험
본 논문에서는 서버와 클라이언트간의 통신 실험을 위하여 임의의 패턴 값으로 생성된 보정정보 파일을 생 성하여 사용하였다. 전송결과 확인을 위하여 1초에 생 성되는 파일의 내용을 1바이트 값을 1씩 증가시킨 값으 로 하여 500bps 데이터를 생성하여 전송을 한 다음 서 버의 전송 기록과 소프트웨어 수신기를 이용하여 확인 한 결과를 비교하였다. 그림 7은 통신 실험에 사용하기 위하여 생성한 500bps 데이터 파일을 보여주고 있다. 1 초마다 생성되는 파일의 이름은 WADGPS_시_분_
초.bin의 형대로 내용은 처음 2바이트는 FF FF, 이후는 초당 1씩 증가되는 값으로 되어 있는 것을 확인할 수 있다.
그림 7. 서버와 클라이언트간의 통신 실험을 위한
500bps 테스트 파일
Fig. 7. Test file for the server-client communication.
그림 8. 서버에서 전송된 파일 Fig. 8. Transferred file from server.
그림 9. 수신 데이터 디코딩 결과 Fig. 9. Data decoding result.
그림 8은 서버에서 생성되어 전송된 파일을 보여주 고 있다. 1초에 하나씩 생성된 파일이 차례대로 빠짐없 이 전송된 것을 확인할 수 있다.
그림 9는 수신기에서 디코딩한 결과를 보여주고 있 다. 비교 결과 1초마다 생성되는 파일에 들어 있는 데 이터들이 정상적으로 1씩 증가된 값으로 나타나 있는 것을 확인할 수 있었다.
2. 광역보정정보 시스템 데모 실험
광역보정정보 시스템 데모 실험은 서버/클라이언트간
통신을 유선으로 이용한 환경과 무선으로 연결된 환경 에 대하여 신호 방사후 소프트웨어 GPS 수신기와 하드 웨어 GPS 수신기, 자동차 네비게이션을 이용하여 결과 를 확인하였다
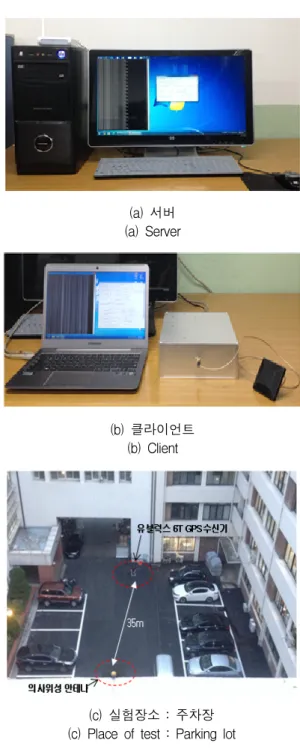
가. 유선랜을 이용한 광역 보정정보 전송 실험 유선랜으로 연결되어 있는 두 대의 PC에 보정정보 데이터를 전송해주는 서버 프로그램과 의사위성에 연결
(a) 서버 (a) Server
(b) 클라이언트 (b) Client
(c) 실험장소 : 주차장 (c) Place of test : Parking lot
그림 10. 유선랜을 이용한 광역 보정정보 전송 실험 Fig. 10. WA-DGNSS test using wired-LAN.
하는 클라이언트 프로그램을 설치하고 7층의 높이에서 지상에 위치한 수신기로 신호를 방사하여 실험을 진행 하였다. 그림 10은 유선랜을 이용한 광역 보정정보 전 송 실험 환경을 보여주고 있다.
실험에는 광역 보정정보 수신이 가능한 유블럭스 6T GPS 수신기와 네비게이션을 사용하여 광역보정정보 신 호획득, 신호추적과 보정정보가 정상적으로 디코딩 되 는가를 확인하였다.
그림 11-(a),(b)는 각각 보정정보 신호 방사전과 후의 수신 결과를 보여주고 있다. 방사후에 127번 위성신호 가 정상적으로 수신되는 것을 확인할 수 있다.
유블럭스 6T 수신기를 이용하여 정상적으로 광역 정보가 수신될 경우 서브프레임 데이터 업데이트 시 간이 1초 단위로 유지되는 것을 확인할 수 있다. 그림 12는 500bps 보정정보 데이터의 디코드 결과를 보여 주고 있다.
(a) 광역보정정보 방사전 (a) Before WA-DGNSS signal radiation.
(b) 광역보정정보 방사후 (b) After WA-DGNSS signal radiation 그림 11. 유블럭스 6T GPS 수신기 결과 Fig. 11. Result of U-blox 6T GPS receiver.
그림 12. 광역보정정보 디코드 결과 Fig. 12. WA-DGNSS data decode result
나. 무선랜을 이용한 광역 보정정보 전송 실험 보정정보 서버와 의사위성과의 통신을 위하여 유선 으로 연결되어 있는 PC는 서버로 사용하고 실외에서
그림 13. 스마트폰 테더링을 이용한 광역 보정정보 전송 실험 환경
Fig. 13. WA-DGNSS test using smart phone tethering.
(a) 광역보정정보 방사전 (a) Before WA-DGNSS signal radiation
(b) 광역보정정보 방사후 (b) After WA-DGNSS signal radiation 그림 14. 유블럭스 6T GPS 수신기 결과 Fig. 14. Result of U-blox 6T GPS receiver.
그림 15. 네비게이션을 이용한 광역 보정정보 보정 결과 Fig. 15. WA-DGNSS correction result of car navigation
노트북에 클라이언트 프로그램을 설치하여 무선 통신망 을 이용하여 실험을 진행하였다. 그림 13은 스마트폰 테더링을 이용한 데모시스템 환경을 보여주고 있다. 무 선 통신망은 SKT사의 갤럭시 S3 스마트폰 테더링을 이용한 방식을 사용하였다.
그림 14-(a),(b)는 각각 스마트폰 테더링을 이용한 보 정정보 신호 방사전과 후의 수신 결과를 보여주고 있 다. 방사후에 127번 위성신호가 정상적으로 수신되고 이후에 1초마다 한번씩 보정정보 데이터가 업데이트 되 는 것을 확인할 수 있다.
그림 15는 네비게이션을 이용한 광역 보정정보 수신 결과를 보여주고 있다. 네비게이션이 광역보정정보를 수신하여 이를 활용한 사용자 위치를 계산하는 시점부 터 사용자 위치의 표시 색깔이 녹색으로 바뀌는 것을 확인할 수 있다.
Ⅳ. 결 론
본 논문에서는 의사위성을 이용하여 준실시간 광역 보정 시스템 데모 실험 결과에 대해서 기술하였다. 중 앙처리국과 WPL간의 통신 실험을 위하여 서버-클라이 언트 프로그램을 구현하여 임의의 패턴값으로 500bps 파일을 생성하여 전송한 데이터를 의사위성을 통해 방 사한 다음 소프트웨어 GPS 수신기를 이용하여 결과를 확인하였다. 서버의 전송 기록과 소프트웨어 수신기를 이용하여 500bps 데이터를 복구한 결과로 생성한 데이 터가 정상적으로 전송되는 것을 확인할 수 있었다.
다음으로 실제 중앙처리국에서 생성한 광역 보정정
보 데이터를 이용하여 실외에서 광역 보정정보 시스템 데모 실험을 진행하였다. 네트워크 상황에 대한 영향을 고려하기 위하여 광역보정정보 데이터가 있는 서버와 클라이언트간의 통신을 유선과 무선 두가지 방식을 이 용하여 실험을 진행하였고 이때 사용한 광역보정정보 데이터는 미리 생성되어 있는 데이터를 사용하였다. 유 블럭스 6T GPS 수신기와 네비게이션을 이용하여 광역 보정정보 신호획득, 신호추적과 보정정보가 디코딩 되 는 것을 확인한 결과 정상적으로 광역 보정정보가 전송 되는 것을 확인할 수 있었다.
REFERENCES
[1] Frnacis Soualle, Kaspar Giger, and Jean-Baptiste Gigant. “Theoretical Approach for the Optimization of Pseudolite Pulsing Scheme and the Implementation of Participative Peceivers.”
Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing, (NAVITEC), 2012 6th ESA Workshop on, 1-8.
[2] Durval Zandonadi Jr., Fernando Walter,
“Pseudolite: Ground-based Transmitter for GPS-Design and Implementation”, PLANS, 2003.
[3] Satoshi Takahashi, Ozuka-Higashi, and Asa- Minami. “Transmission Power Control of Terrestrial Pseudo Satellite Signal for Global Navigation Satellite Systems.” TENCON 2012 - 2012 IEEE Region 10 Conference, 1-5.
[4] Chang-Don Kee, “Development of the GPS APL(Airport Pseudolite)”, KICTEP, 2005.
저 자 소 개 권 금 철(학생회원)
2001년 중앙대학교 전자전기 공학부 공학사 2003년 중앙대학교 전자전기
공학부 공학석사 2007년∼현재 중앙대학교
전자전기공학부 박사 과정
<주관심분야 : 컴퓨터, 반도체, SOC설계, GNSS>
심 덕 선(정회원)
1984년 서울대학교 제어계측 공학과 공학사 1986년 서울대학교 제어계측
공학과 공학석사 1993년 미시간대학교 항공우주
공학과 공학박사
1995년 3월∼현재 중앙대학교 전자전기공학부 교수
<주관심분야 : 제어, GNSS, 관성항법시스템, 필 터링, 고장검출 >