비정렬 혼합 격자계에서 신속 격자 변형 기법을 이용한 비정상 점성 유동 해석
이 희 동,1 정 문 승,1 권 오 준*2
N
UMERICALA
NALYSIS OFU
NSTEADYV
ISCOUSF
LOWSUSING A
F
ASTG
RIDD
EFORMATIONT
ECHNIQUE ONH
YBRIDU
NSTRUCTUREDM
ESHES H.D. Lee,1 M.S. Jung1 and O.J. Kwon*2In the present study, a fast grid deformation technique has been incorporated into the unsteady compressible and incompressible viscous flow solvers on unstructured hybrid meshes. An algebraic method based on the basis decomposition of normal edge vector was used for the deformation of viscous elements, and a ball-vertex spring analogy was adopted for inviscid elements among several spring analogy methods due to its robustness. The present method was validated by comparing the results obtained from the grid deformation and the rigid motion of entire grids. Fish swimming motion of an NACA0012 airfoil and flapping wing motion of a generic fighter were also simulated to demonstrate the robustness of the present grid deformation technique.
Key Words : 격자 변형 기법(Grid Deformation Technique), 스프링 상사성(Spring Analogy), 비정렬 혼합 격자계(Unstructured Hybrid Meshes ), 비정상 유동(Unsteady Flow), 물고기 유영 운동 (Fish Swimming Motion), 플래핑
날개(Flapping Wing)
접수일: 2009년 5월 16일, 수정일: 2009년 9월 1일, 게재확정일: 2009년 9월 4일.
1 학생회원, 한국과학기술원 대학원 항공우주공학과 2 정회원, 한국과학기술원 항공우주공학과
* Corresponding author, E-mail: [email protected]
1. 서 론
지속적인 전산 유동 수치 해석 기법의 발전과 전산기의 고 성능화 및 대용량화에 따라 다양한 형태의 비정상 유동에 대 한 수치해석이 수행되고 있다. 이러한 비정상 유동 문제 중 유체-구조간의 상호 간섭 현상, 자유 표면 운동, 형상 최적화, 스토어 분리, 그리고 조종면의 상대 운동 등은 경계가 비정상 적으로 움직이는 문제(boundary moving problem)이다. Volume of fluid 방법 또는 level-set 방법 등과 같이 고정된 격자계에 서 경계 또는 계면을 생성하는 방법과 달리, 경계에 맞추어 격자를 생성하는 boundary-conforming 형태의 수치 기법에서는 매 시간 단계마다 변화하는 경계에 따라 새로운 격자계가 요
구된다. 매 시간 단계마다 새로운 형태의 격자계를 얻는 방법 으로 격자 재생성(mesh regeneration) 기법[1,2], 격자 변형(mesh deformation) 기법[3-9], 그리고 중첩 격자(overset mesh) 기법 [10,11] 등이 있다. 세 방법 중 매 시간 단계에서 새로운 격자 를 생성하는 격자 재생성 기법은 방대한 계산 시간이 소요되 어 실제적인 문제에 대해 적용하기 곤란하다. 그리고 중첩 격 자 기법은 스토어 분리 문제와 같이 물체간의 상대운동만 존 재하는 경우에 대해서는 적용가능하나, 경계의 변형이 존재하 는 유체-구조 상호 간섭 현상과 형상 최적화 문제 등에 대해 서는 적용될 수 없다. 그러므로 경계의 변형이 존재하는 문제 를 해석하기 위해서는 격자 변형 기법이 가장 효율적이며 적 합한 방법이다. 격자 변형 기법은 격자계의 종류에 따라 서로 다른 형태로 개발되어 왔다. 정렬 격자계에서는 대부분 TFI(Trans-Finite Interpolation) 에 기초한 대수적 기법을 기반으 로 격자 변형 기법이 개발되었으며[10,11], 비정렬 격자계에서 의 격자 변형 기법은 스프링 상사성[3-8](spring analogy)에 기 반하여 개발되어 왔다.
스프링 상사성 기법은 초기 격자계의 모든 점이 가상의
스프링으로 연결되어 있으며 힘 평형상태에 있다고 가정한다.
경계면에 존재하는 격자점의 위치 변화에 의해 교란된 스프 링 시스템은 새로운 힘 평형상태에 도달하고 되고, 이때의 내 부 격자점의 위치를 구함으로써 새로운 격자계를 구성하는 방법이다. 스프링 상사성은 평형 길이(equilibrium length)를 어 떻게 가정하는가에 따라 점 스프링(vertex spring)과 선 스프링 (segment spring) 으로 나뉠 수 있다[14]. 점 스프링은 평형 길 이를 영(zero)으로 가정하는 경우로 격자 생성 또는 격자 적 응 후 격자질을 높이기 위한 방법으로 사용되어 왔다. 통상적 으로 격자 변형에 적용되는 스프링 상사성은 평형 길이를 격 자점간의 거리로 사용하는 선 스프링 방법으로 점 스프링에 비해 보다 높은 강건성을 보인다.
선 스프링은 최초로 Batina[3]에 의해 비정렬 격자계에 적 용되었다. Batina는 격자점간의 모서리를 선형 스프링(linear spring) 으로 가정하였으며 스프링의 강성(stiffness)을 두 격자점 의 길이에 반비례하도록 결정하였다. 선형 스프링 방법은 물 체의 비정상 운동 해석[15,16]이나 형상 최적화 문제[17]에 성 공적으로 적용되어 왔다. 그러나 선형 스프링은 격자점간의 길이에 반비례하는 강성을 가진다고 가정함으로써 격자점간 의 충돌은 방지할 수 있으나, 격자점이 모서리 또는 면을 통 과(vertex-edge/face crossover)함으로써 발생하는 음의 체적 격 자를 방지할 수 없다. 그러므로 선형 스프링은 물체의 변형이 나 운동이 격자의 크기에 비해 상대적으로 작은 경우에만 제 한적으로 적용되어 왔다.
음의 체적 격자가 생성되는 선형 스프링의 단점을 보완하 기 위해 Fahat 등[4]은 비틀림 스프링(torsional spring) 기법을 개발하였다. 비틀림 스프링 기법은 삼각형의 세 꼭지점에 비 틀림 스프링이 연결되어 있다고 가정하고 두 모서리가 이루 는 각이 0도나 180도가 되지 않도록 스프링 강성을 결정함으 로써 음의 체적 격자가 생성되는 것을 방지할 수 있는 방법 으로, 변위가 큰 변형이나 물체 이동에 대해서도 강건하게 적 용될 수 있다. 이차원에서 개발된 비틀림 스프링 상사성 기법 은 삼차원 사면체 격자에 대해서도 확장 개발되었다[5]. 사면 체 격자계에서의 비틀림 스프링 기법은 각 꼭지점에서 맞은 편 면에 수직한 가상의 삼각형을 생성하고, 가상의 삼각형 꼭 지점에 비틀림 스프링을 적용한다. 그러므로 삼차원 비틀림 상사성 기법은 하나의 사면체 요소에 12개의 비틀림 스프링 이 추가되어, 이차원 삼각형 격자에 비해 계산 비용이 매우 많이 소요된다. 또한 비틀림 상사성 기법은 기본적으로 미소 변위 가정으로부터 유도되므로, 미소 변위 가정을 만족하도록 시간 간격을 매우 작게 적용해야 하는 단점을 가지고 있다.
Bottasso 등[7,8]은 음의 체적 격자를 방지할 수 있는 또 다른 형태의 스프링 상사성 기법을 개발하였다. 이는 삼각형 또는 사면체 요소의 각 꼭지점으로부터 맞은편 모서리나 면에 수
직되도록 선형 스프링을 추가함으로써, 항상 격자점(vertex)이 인접한 주위 격자점으로 둘러싸인 ball 내부에 위치할 수 있 도록 고안된 방법으로 ball-vertex 스프링 기법이라 명명되었 다. Ball-vertex 스프링 기법은 삼차원 사면체 격자에 대한 적 용이 용이하고, 기존의 선형 스프링 기법에 쉽게 접목 가능하 다는 장점을 가진다. 또한 미소 변위에 대한 가정이 없어 큰 시간 간격에 대해서도 강건하게 적용될 수 있다.
음의 체적 격자 생성을 방지할 수 있는 비틀림 스프링과 ball-vertex 스프링 기법은 삼각형 또는 사면체로 구성되는 비 정렬 격자계 기반으로 개발되었다. 그러나 점성 유동 해석을 위한 혼합 격자계는 높은 종횡비를 가지는 프리즘 또는 육면 체 격자 요소, 그리고 사면체와의 연결성을 위해 요구되는 피 라미드 격자 요소를 포함한다. 사면체 격자계에서 개발된 스 프링 상사성 기법은 육면체, 프리즘, 그리고 피라미드 격자 요소를 사면체로 분할함으로써 혼합격자계에 대해서도 적용 가능하다. 그러나 10
3정도의 높은 종횡비를 가지는 난류 유 동 점성 격자계를 사면체로 분할하여 격자 변형을 수행하기 위해서는 매우 작은 시간 간격으로 격자를 변형해야 하므로 방대한 계산 비용이 소요된다. 이를 극복하기 위해 비정렬 혼 합격자계에서의 격자 변형은 프리즘과 육면체로 구성되는 점 성 격자에 대해서는 정렬 격자계에서와 유사한 대수적인 방 법을 적용하고, 피라미드와 사면체로 구성되는 비점성 격자에 대해서는 스프링 상사성 기법을 사용하는 방법이 널리 사용 된다[15].
본 연구에서는 기 개발된 병렬화된 압축성/비압축성 점성
유동 해석 프로그램[19,20]에 격자 변형 기법을 적용하여 물
체 경계가 움직이는 문제를 해석하기 위한 비정상 유동 해석
프로그램을 개발하였다. 비정렬 혼합격자계에서의 격자 변형
은 프리즘과 육면체로 구성되는 점성 격자와 피라미드와 사
면체로 구성되는 비점성 격자에 대해 다른 두 방법을 독립적
으로 적용하였다. 높은 종횡비를 가지는 점성 격자에 대한 변
형은 수직 벡터의 기저분할에 기반한 대수적인 방법을 이용
하였으며, 비점성 격자의 변형은 음의 체적 격자를 방지할 수
있고 높은 시간 간격을 허용할 수 있으며, 기존의 선형 스프
링 기법으로부터의 확장이 용이한 ball-vertex 스프링 기법을
적용하였다. 격자 변형 기법이 적용된 점성 유동 해석 프로그
램을 이용하여 실험치가 존재하는 NACA0012 에어포일 형상
이 주기적으로 피칭운동하는 문제에 대한 비정상 점성 해석
을 수행하였으며, 격자 변형을 통해 피칭운동을 모사한 경우
와 전체 격자를 강체로 움직임으로써 피칭운동을 모사한 해
석결과를 비교함으로써 격자 변형 기법을 검증하였다. 그리고
적용된 격자 변형 기법의 강건성을 확인하기 위해 물체 표면
자체의 변형이 존재하고 그 변위 또한 큰 물고기가 유영 운
동하는 문제에 대한 해석을 수행하였다. 또한 복잡한 전투기
Fig. 1 Linear spring analogy 형상의 주날개 플래핑(flapping) 운동을 모사함으로써 격자 변
형 기법이 실제적인 대용량 수치해석 문제에 적용될 수 있음 을 확인하였다.
2. 유동 해석 기법
본 연구에서는 기 개발된 비정상 압축성/비압축성 점성 유 동 해석 프로그램[19,20]에 격자 변형 기법을 적용하여 물체 경계가 움직이는 문제를 해석하기 위한 유동 해석 프로그램 을 개발하였다. 압축성 및 비압축성 점성 유동 해석 프로그램 에 적용된 수치 기법은 각각 참고문헌 [19]와 [20]에 자세히 기술되어 있다. 본 절에서는 기 개발된 유동 해석 코드들에 적용된 수치 기법을 간략히 소개한다.
압축성/비압축성 Navier-Stokes 방정식은 격자점 중심의 유 한 체적법을 이용하여 공간이산화 되었다. 비압축성 Navier-Stokes 방정식의 경우, 압축성 Navier-Stokes 방정식의 이산화 방법과 유사하게 모든 변수가 동일한 위치(collocated) 에 저장되고 각 방정식의 변수가 연계되어(coupled) 풀이되는 가상 압축성 기법(artificial compressibility method)을 사용하였 다. 비점성 대류항은 Roe의 FDS(Flux Difference Splitting)을 이용하여 계산되었으며, 비압축성인 경우 Roe의 평균값으로 단순 산술 평균을 사용하였다. 대류항에 대한 이차 정확도 계 산을 위해 각 제어체적의 유동 변수를 최소 자승법을 이용하 여 재구성하였다. 점성 유속을 계산하기 위한 제어 체적면에 서의 일차 미분값은 홀짝분리 현상(odd-even decoupling)을 방 지하기 위해 수정된 중심차분법을 사용하였으며, 수정된 중심 차분법에서 사용되는 격자점에서의 유동 변수 기울기는 Green-Gauss 정리를 이용하여 계산되었다. 시간 적분은 이차 정확도 Euler 후방 차분에 근거한 내재적 기법을 사용하였으 며, 가상 시간(pseudo-time)을 도입하여 비정상 잔류항을 충분 히 수렴시킴으로써 시간 정확도를 확보할 수 있는 이중 시간 적분법(dual time stepping)을 사용하였다. 최종적으로 얻어지는 선형 시스템은 point Guass-Seidel방법을 이용하여 풀이되었다.
지배 방정식에서의 난류항은 Spalart-Allmaras의 난류모형을 이 용하여 계산되었으며, 난류 모형 방정식은 지배 방정식과 유 사한 형태로 이산화되었다. 유동 해석 코드는 계산 시간 절감 과 메모리 한계를 극복하기 위해 병렬화되었다. 계산 영역은 MeTis 라이브러리를 이용하여 분할되었으며, 계산 영역간의 자료 교환은 MPI 라이브러리를 사용하였다.
3. 격자 변형 기법
본 연구에서 사용하는 점성 유동 해석 코드는 경계층이 존 재하는 영역에서는 프리즘과 육면체의 격자 요소를 사용하고,
비점성 영역에서는 사면체와 피라미드를 사용하는 비정렬 혼 합 격자계를 기반으로 개발되었다. 그러므로 본 연구에서는 비정렬 혼합 격자계에 대해 격자 변형 기법을 개발하였다. 프 리즘과 육면체로 구성되는 점성 격자에 대한 변형은 수직 모 서리 벡터의 기저 분할에 기초한 대수적인 방법을 이용하였 다. 사면체와 피라미드로 구성되는 비점성 격자에 대해서는 음의 체적 격자를 방지할 수 있고 높은 시간 간격을 허용할 수 있으며, 기존의 선형 스프링 기법으로부터의 확장이 용이 한 ball-vertex 스프링 기법을 이용하여 변형을 수행하였다.
3.1 비점성 격자 변형 기법
삼각형 또는 사면체로 구성되는 비점성 격자계의 변형은 대부분 스프링 상사성 기법을 이용하여 적용된다. 스프링 상 사성 기법은 초기 격자계의 모든 점이 힘 평형상태에 있는 가상의 스프링으로 연결되어 있다고 가정한다. 경계면 격자점 의 위치 변화로부터 교란된 스프링 시스템은 새로운 힘 평형 상태에 도달하고 되고, 이때의 내부 격자점의 위치를 구함으 로써 새로운 격자계를 구성하는 방법이다. 본 절에서는 선형 스프링 기법과 ball-vertex 스프링 기법에 대해 검토하고 이차 원 익형이 회전하는 문제에 적용함으로써 각 기법의 특성을 파악한다.
3.1.1 선형 스프링 기법
선형 스프링 기법은 최초로 Batina[3]에 의해 개발되었으며, 두 격자점을 연결하는 모서리를 하나의 선형 스프링으로 간 주하여 전체 격자계에 대한 스프링 시스템을 구축한다. 각 모 서리의 스프링 강성
는 길이에 반비례하도록 다음과 같이 결정된다.
⋅
(1)
여기서,
는 Fig. 1에서와 같이 두 격자점을 연결
(a) vertex and its ball
(b) 2-D triangle (c) 3-D tetrahedron Fig. 2 Ball-vertex spring analogy
하는 벡터이고,
와
는 각 격자점 와 의 위치벡터이다.
Batina 는 두 격자점의 변위
와
에 의해 격자점 에 작 용하는 힘
와 격자점 에 작용하는 힘
가 다음과 같 다고 유도하였다.
(2)
그러나 이는 변위의 방향과 힘의 방향이 항상 동일한 일차원 선형 스프링에만 성립되는 식으로, 다차원 선형 스프링에 대 한 힘-변위 관계식은 다음과 같다.
⋅
(3)
여기서
는
의 단위 벡터로서
⋅
이다
격자점 에 대한 힘 평형상태식은 격자점 와 연결된 모든 스프링으로부터의 발생하는 힘의 합이 영인 것으로, 다음과 같다.
(4)
여기서
는 격자점 와 연결되어 있는 모서리 개수이다.
식 (2)와 식 (3)을 행렬 형태로 표현하면 각각 다음과 같다.
(5)
(6)
여기서
는
dim×
dim의 크기를 가지는 단위행렬이고,
dim은 차원의 수이다. Batina의 방법은 힘의 각 성분에 대해 좌표 성분이 완전히 분리되어(decoupled) 있음을 식 (2)와 식 (5) 로부터 알 수 있다. 그리므로 새로운 힘 평형상태의 변위
는 각 방향 성분에 대해 독립적으로 Jacobi 반복법을 적용 함으로써 얻을 수 있다.
dim(7)
식 (7)로써 새로운 변위를 구하는 Batina의 선형 스프링 방 법은 스프링 시스템을 엄밀하게 모사한 것이 아니라 주위 변 위 벡터를 단순하게 거리의 역을 가중치로 평균 (inverse-distance weighted average) 하는 방법으로 간주할 수 있 다[6]. Batina의 방법은 매우 효율적으로 격자점의 위치를 변 화시킬 수 있는 장점이 있으나, 각 변위 성분간의 연결성이 없고(decoupled) 경계면에서의 변위량이 국부적으로만 전달므 로 강건성이 저하되는 단점을 가진다.
본 연구에서는 다차원에서 스프링 시스템을 엄밀하게 모사 하는 식 (3)과 (6)의 힘-변위 관계식을 사용하였다. 식 (4)의 힘평형 방정식을 모든 격자점에 대해 적용하면 다음과 같이 최종적인 선형 시스템을 얻을 수 있다.
(8)
여기서, 매우 성긴 행렬인
는
dim×
dim의 크기를 가 지는 block을 하나의 요소로 가진다. 그리고 는 주어진 경계 조건을 포함하고 있는 벡터이다. 식 (7)의 선형 시스템은 유 동 해석 코드와 동일하게 point Gauss-Seidel방법을 이용하여 풀이되었다.
3.1.2 ball-vertex 스프링 기법
Bottasso 등[7]은 Fig. 2의 (a)에 나타나 있는 바와 같이 모
든 격자점(vertex)이 인접한 주위 격자점으로 둘러싸인 ball 내
Fig. 3 Initial mesh used for the test of spring analogy methods 부를 벗어날 수 없도록, Fig. 2의 (b)와 (c)에서와 같이, 삼각형
또는 사면체 요소의 각 꼭지점으로부터 맞은편 모서리나 면 에 수직되는 선형 스프링을 추가함으로써 음의 체적 격자 생 성을 방지할 수 있는 ball-vertex 스프링 기법을 개발하였다.
삼각형 격자계에 대한 ball-vertex 스프링 기법은 사면체 격 자계에 대한 기법과 매우 유사하므로 본 절에서는 Fig. 2의 (c) 에 나타나 있는 사면체 격자계에 대해서만 기술한다. 하나 의 꼭지점 로부터 맞은편 격자면인 평면으로 하나의 수 선을 내리고 이 수선이 평면과 만나는 점을 라 한다. 점 의 위치 벡터
는 다음과 같이 구할 수 있다.
⋅ (9)
모서리에 추가된 선형 스프링으로 인해 격자점 에 작 용하는 힘
와 점 에 작용하는 힘
은 다음과 같다.
⋅
(10)
여기서 점은 가상의 점이므로
는 삼각형의 각 꼭지점 변위로 표현되어야 한다.
는 삼각형과 동일한 평면에 위치하므로, 삼각형의 면적 좌표(area coordinate) , , 와 꼭 지점의 좌표
,
,
를 이용하여 다음과 같이 표현될 수 있다.
(11)
모든 점의 좌표를 알고 있으므로 를 이용하 면 세 면적 좌표는 유일하게 결정될 수 있다. 그러므로 점 에서의 변위
를 면적 좌표를 이용하여 , , 의 변위로 표현할 수 있다.
(12)
그리고, 점의 가상 변위(virtual displacement)
에 의해 발 생하는 가상일(virtual work done)은 , , 에서의 가상변위에 의한 가상일과 동일하므로,
⋅
⋅
⋅
⋅
(13)
이다. 여기서 식 (12)를 이용하면 선형 스프링 에 의해 ,
, 에서의 힘은 다음과 같이 구해질 수 있다.
(14)
식 (10)과 (14)를 행렬 형태로 표현하면 다음과 같다.
(15)
여기서
는
를 의미한다. 하나의 ball-vertex 스프링 에 대한 힘-변위 관계식인 식 (15)는 불리언(boolean) 연산자를 이용하여 여섯 모서리로 분할되어 적용된다. 그리고 나머지 세 격자점인 , , 격자점에 대한 ball-vertex 스프링의 힘- 변위 관계식도 동일한 방법으로 결정될 수 있다. 선형 스프링 과 ball-vertex 스프링이 동시에 고려된 최종 선형 시스템은 선 형 스프링 시스템과 동일하게 point Gauss-Seidel 기법으로 풀 이되었다.
3.1.3 스프링 상사성 테스트
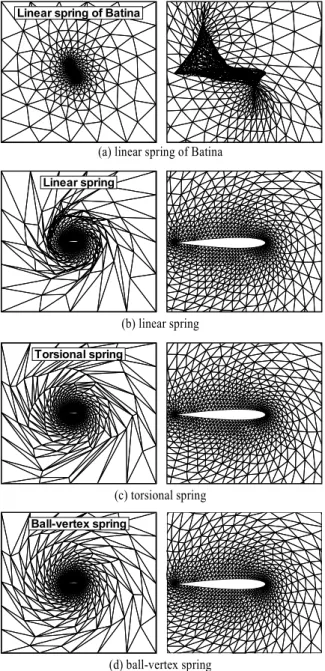
본 절에서는 스프링 상사성 기법의 특성을 파악하기 위해 이차원 NACA0012 에어포일이 시위길이의 지점을 중심으 로 180도까지 피칭 운동하는 비정상 문제를 선형 스프링, 비 틀림 스프링, 그리고 ball-vertex 스프링 기법을 이용하여 격자 변형을 수행하였다. 주기적인 피칭 운동하는 에어포일의 받음 각은 다음과 같이 정의된다.
sin
∞
∞
(16)
Linear spring of Batina
(a) linear spring of Batina
Linear spring(b) linear spring
Torsional spring(c) torsional spring
Ball-vertex spring(d) ball-vertex spring
Fig. 4 Deformed triangular meshes when
Fig. 5 Grid quality measures for the pitching airfoil
여기서,
는 초기 받음각이고
은 진폭,
∞는 자유류의 마하수, 는 감쇄 주파수, 는 무차원 시간을 의미한다. 스프 링 기법의 강건성을 확인하기 위해 피칭운동의 진폭은 180도 로 설정하였다. 그리고 무차원 시간 간격 는 0.25로 설정 되었으며, 한 주기를 위해서는 204번의 시간전진이 필요하였 다.
스프링 상서성의 특성을 비교하기 위해 사용된 격자는 Fig.
3 에 나타나 있는 바와 같이 매우 성기게 생성되었으며, 1,853
개의 삼각형 격자요소와 975개의 격자점으로 구성된다. 원방
경계는 항상 고정되어 있으며, 물체 표면 경계는 식 (16)의
받음각이 변화함에 따라 피칭 운동을 한다. 내부 격자점은 모
든 경계에서의 변위를 경계조건으로 하는 스프링 상사성 기
법에 의해 이동된다. 식 (2)로 표현되는 Batina의 선형 스프링
기법과, 식 (3)으로 표현되는 선형 스프링 기법을 구분하여
테스트를 수행하였으며, 앞 절에서 설명한 ball-vertex 스프링
기법 뿐만 아니라 비틀림 스프링 기법에 대한 테스트도 수행
하였다. Fig. 4는 최대 받음각인 180도인 경우의 격자계를 나
타내고 있다. 3.1.1.절에서 언급한바와 같이 Batina의 선형 스
프링 기법은 대부분의 변형이 물체 표면 부근에서만 이루어
지며 원방 경계에서의 변형은 미미하다. 또한 격자점이 모서
리를 통과하여(vertex-edge crossover) 대부분의 격자에서 음의
체적이 발생하는 것을 확인할 수 있다. 식 (3)으로 표현되는
선형 스프링 기법의 경우 대부분의 변형은 원방 경계 부근에
(a) stacked viscous layers
(b) basis decomposition of a normal edge vector in original meshes
(c) new normal edge vector in deformed meshes Fig. 6 Deformation of viscous meshes
서 발생하며 물체 표면에서의 변형은 적다. 그러나 선형 스프 링의 특성상 vertex-edge crossover를 방지할 수 없어 음의 체 적이 발생하였다. Batina 선형 스프링의 경우는 12번의 시간전 진 후 음의 체적이 발생하였으며, 식 (3)으로 표현되는 선형 스프링에서는 21번의 시간전진 후 음의 체적이 발생하였다.
이에 반에 비틀림 스프링과 ball-vertex 스프링은 과도한 격자 변형에도 불구하고, 음의 체적 격자가 생성되지 않았다. 격자 변형에 따른 격자질을 정량적으로 나타내기 위해 삼각형 외 접원의 반지름(circumradius,
) 에 대한 내접원 반지름 (inradius,
) 의 비와 삼각형 내각의 최대각(
max) 에 대한 최 소각(
min) 의 비를 구하였으며, Fig. 5는 두 비가 0.05보다 작 은 값을 가지는 격자셀 수를 각 스프링 상사성 기법에 대해 나타낸 것이다. 한 주기의 피칭운동동안 격자질 저하는 Batina 의 선형 스프링이 가장 크게 나타나며, 식 (3)의 선형 스프링,
비틀림 스프링, 그리고 ball-vertex 스프링 순으로 나타났다. 그 러므로 본 연구에서는 대규모 변위에 대해서 음의 체적을 방 지할 수 있고, 높은 격자질을 유지할 수 있는 ball-vertex 스프 링 기법을 이용하여 비점성 격자에 대한 변형을 수행하였다.
3.2 점성 격자 변형 기법
전술한 바와 같이 프리즘과 육면체로 구성되는 경계층 영 역의 격자는 10
3정도로 높은 종횡비를 가지므로 강건한 ball-vertex 스프링을 이용하더라도 수치적인 오차에 의해 음의 체적이 발생할 수 있다. 그러므로 본 연구에서는 참고문헌 [9]
에서 사용한 대수적인 방법을 이용하여 점성 격자의 변형을 수행하였다.
점성 격자계는 Fig. 6의 (a)와 같이 물체 표면에 수직한 방 향으로 적층되어 있으므로, 점성 격자계의 변형 또한 물체 표 면에 존재하는 격자점으로부터 수직 방향으로 순차적으로 진 행된다. Fig. 6의 (b)에 나타난 바와 같이, 물체 표면에 존재하 는 삼각형의 한 점 로부터 수직으로 적층된 점 는 삼각형 의 수직 단위 벡터인
와, 삼각형의 두 모서리 벡터의 단위 벡터인
와
를 기저 벡터를 이용하여 다음과 같이 분할 될 수 있다.
⋅
⋅
⋅
(17)
Fig. 6 의 (c)에서와 같이 물체 표면위의 세 점 , , 가
′ , ′ , ′ 로 변형되었을 때 새로운 격자점 ′ 는 세 기저 벡 터
′,
′′,
′′와 식 (17)의 기저벡터에 대한 계수를 이용하 여 다음과 같이 계산될 수 있다.
′′
⋅
′
⋅
′′
⋅
′′(18)
물체 표면위의 점 는 여러개의 삼각형과 인접해 있으므 로, 최종적인
′는 인접한 모든 삼각형으로부터 얻어진 값을 산술평균하여 결정하였다. 표면에 존재하는 모든 점으로부터 적층된 격자점의 위치를 구한 이후, 다음으로 적층된 격자점 의 위치를 구하는 순차적인 방법으로 모든 점성 격자에 존재 하는 격자점의 위치를 결정하였다.
비정렬 격자계에서는 정렬 격자계와 달리 점성 격자계의
적층 정보가 존재하지 않는다. 그러므로, 격자점-격자점
(vertex-to-vertex), 격자점-모서리(vertex-to-edge), 격자점-격자면
(vertex-to-face), 격자점-격자요소(vertex-to-cell) 등의 자료구조
로부터 Fig. 6의 (a)와 같이 base layer의 점과 upper layer 점,
그리고 수직 모서리와 이와 접하는 base layer의 삼각형을 탐
색한다. 그리고 base layer에서 변형된 격자점 정보를 이용하
Fig. 9 Instantaneous pressure coefficient distributions for a pitching NACA0012 airfoil
(a) normal force coefficient (b) pitching moment coefficient Fig. 10 Unsteady normal force and pitching moment hystereses
for a pitching NACA0012 airfoil
X Y
Z
Y
X Z
hexahedron prism
pyramid
Fig. 7 Unstrucuted hybrid meshes for a pitching NACA0012 airfoil
(a) rigid motion
(b) mesh deformation using ball-vertex spring Fig. 8 Instantaneous meshes and pressure contours for a pitching
NACA0012 airfoil(
)
여 upper layer 격자점의 위치를 결정한다. 이러한 과정은 점 성 격자에 존재하는 모든 격자점의 위치가 갱신될 때까지 반 복하여 수행된다.
4. 결과 및 검토
비정렬 혼합격자계를 기반으로 개발된 격자 변형 기법을 압축성/비압축성 유동 해석 프로그램에 적용하여 실제적인 유 동 문제를 해석하였다. 격자 변형 기법이 적용된 점성 유동 해석 프로그램을 이용하여 실험치가 존재하는 NACA0012 에 어포일 형상이 주기적으로 피칭운동하는 문제에 대한 점성 해석을 수행하였다. 격자 변형 기법을 이용하여 해석한 경우 와 전체 격자를 강체로 움직인 해석결과를 비교함으로써 유
동 해석 프로그램에 적용된 격자 변형 기법을 검증하였다. 피 칭운동하는 NACA0012 에어포일과 F-5 날개는 물체 표면에서 의 변형이 존재하지 않는 문제이며, 또한 피칭 운동의 변위가 작은 문제이다. 본 연구에서 개발된 격자 변형 기법의 강건성 을 확인하기 위해 물체 표면 자체가 변형하며 그 변위 또한 상대적으로 큰 물고기가 유영 운동하는 문제에 대한 해석을 수행하였다. 그리고 실제적인 전투기 형상에서 주날개가 플래 핑(flapping) 운동하는 문제에 대한 해석도 수행하였다.
4.1 주기적인 피칭운동하는 NACA0012 에어포일
비정상 유동 해석 코드의 검증을 널리 사용되고 있는 주기
적인 피칭운동하는 NACA0012 에어포일 문제[20]를 변형 격
자 기법을 이용하여 해석하였다. 자유류의 마하수는 0.755이
고, 초기 받음각은 0.016도, 그리고 레이놀즈 수는 난류 영역
인 5.5×10
6이다. 주기적인 피칭운동에 따른 받음각의 변화는
식 (16)에 의해 정의되며, 감쇄 주파수는 0.0814, 받음각 진폭
은 2.51도, 그리고 주기는 약 51.12이다. 비정상 유동 해석에
앞서, 정상유동에 대한 해석을 수행하였으며, 3000번의 반복
Fig. 13 Deformed meshes for the simulation of an undulatory swimming fish
x/c
a
m/c
0.00 0.25 0.50 0.75 1.00
0.00 0.05 0.10 0.15 0.20 0.25
Shu et al.
Liu et al.
Fig. 11 Amplitude of undulatory motion used for the simulation of tadpole swimming
Fig. 12 Unstructured hybrid meshes for the simulation of an undulatory swimming fish
계산을 통해 10
-6까지 잔류항을 수렴시켰다. 수렴된 정상해로 부터 0.1의 무차원 시간 간격을 이용하여 비정상 계산을 수행 하였으며, 이차의 시간 정확도를 확보하기 위해 이중 시간 적 분법을 적용하여 20번의 반복 계산을 수행하였다. 계산에 사 용된 격자계는 물체 표면으로부터 생성된 467,718개의 프리 즘, 뾰족한 뒷전 영역에 생성된 5,540개의 육면체, 비점성 영 역에 생성된 93,310개의 사면체, 그리고 프리즘 또는 육면체 와 사면체를 연결성을 보장하기 위한 602개의 피라미드와 267,548 개의 격자점으로 구성된다. 점성 격자층의 초기 두께 는 10
-5이고 1.25의 두께비로 계산에 사용된 혼합 격자계를 Fig. 7 에 나타내었다. 정상 해석으로부터 얻은
는 초기 두 께에서 약 1.0이었다.
피칭 운동은 전체 격자를 하나의 강체로 가정하여 동시에 회전하는 방법과 격자 변형 기법을 이용하는 방법으로 모사 되었다. 전체 격자를 강체 운동으로 모사하는 경우는 모든 격 자점을 1/4 시위길이 지점을 중심으로 회전시켰으며, 격자 변 형 기법을 사용하는 경우는 에어포일 위의 격자점만 회전시 키고 원방 경계 격자점은 고정한 뒤 격자 변형 기법을 이용
하여 내부 격자점을 이동시켰다. 또한 비점성 영역에서 선형 스프링을 사용한 경우와 ball-vertex 스프링 기법을 사용한 경 우에 대해 각각 계산을 수행하였다. Fig. 8은 받음각이 2.51도 가 되는 순간의 격자계와 압력분포를 강체 운동으로 모사한 경우와 ball-vertex 스프링 기법을 이용하여 격자를 변형시킨 경우에 대해 나타낸 것이다. 격자를 강체 운동으로 모사한 경 우는 원방경계가 에어포일과 동일하게 회전되나 격자 변형 기법을 적용한 경우는 고정되어 있는 것을 확인할 수 있다.
Fig. 9 와 Fig. 10은 각각 순간적인 압력 분포와 비정상 수직력 계수 및 모멘트 계수를 실험치를 포함하여 격자를 강체 운동 시킨 경우, 선형 스프링으로 격자를 변형한 경우, 그리고 ball-vertex 스프링으로 격자 변형을 수행한 결과를 서로 비교 하여 나타낸 것이다. 격자 변형 기법을 사용한 경우와 격자를 강체 운동시킨 결과가 동일함을 확인할 수 있으며, 이는 격자 변형 기법이 유동 해석 코드에 정상적으로 적용되었음을 의 미한다. 본 문제는 에어포일의 회전 진폭이 2.51도로 매우 작 은 문제이므로 선형 스프링과 ball-vertex 스프링의 결과 또한 동일하게 나타난다.
4.2 NACA0012 에어포일의 유영 운동에 대한 유동해석
본 절에서는 격자 변형 기법의 강건성을 확인하기 위해 큰 변위를 가지고 물체 표면 자체의 변형이 동반되는 물고기의 유영 운동에 대한 비정상 유동 해석을 수행하였다. Videler[21]
는 물고기의 유영 운동을 Fourier series중 처음 홀수 세 항을
이용하여 표현하였으며, 첫째 항이 유영 운동에 가장 지배적
No. of periods
C
d2 3 4 5
-1.5 -1.0 -0.5 0.0
original mesh upside-down mesh
Fig. 15 Unsteady drag coefficients obtained from the original mesh and the upside-down mesh
wt c
d0 45 90 135 180 225 270 315 360
-1.5 -1.0 -0.5 0.0 0.5
tip deflection present Shu et al.(LBM)
Fig. 16 Comparison of unsteady drag coefficients during a period Fig. 14 Unsteady force coefficients during a period
임을 보였다. 그러므로 물고기 유영 운동에 대한 수치 모사 [1,22] 는 대부분 Fourier series의 첫째항만을 고려하여 수행하 였으며, 본 연구에서도 타 연구자들[1,22]과 동일하게 다음과 같은 단순 조화 함수 형태의 유영 운동을 사용하였다.
cos (19)
여기서
는 진폭을 의미하고, 는 파장, 그리고 는 주 파수를 나타낸다. 식 (19)는 대부분의 물고기 유영 운동에 적 용될 수 있으나 머리부터 꼬리까지의 진폭은 물고기의 종류 에 따라 다르다[23]. Liu 등[1]과 Shu 등[22]은 참고문헌 [23]에 나타나 있는 올챙이 진폭을 다항식으로 근사하여 유영 운동
을 표현하였다. 본 연구에서는 Shu 등[22]이 사용한 진폭을 택하였으며, 이를 Fig. 11에 나타내었다. 머리부분에서는 약 시위길이의 5% 정도의 진폭을 가지고, 꼬리 부분에서는 약 20% 정도의 최대 진폭을 가지며, 1/4 시위길이 지점에서는 진 폭이 최소가 된다. 그리고 유영 운동의 파장과 주파수는 각각 0.87 과 2.0로 결정되었다.
NACA0012 에어포일 단면을 가지고 0.2 시위길이의 폭을 가지는 삼차원 무한 수중익을 생성하여 계산을 수행하였다.
계산에 사용된 격자계는 242,956개의 프리즘, 1,728개의 육면 체, 261,250개의 사면체, 그리고 480개의 피라미드와 267,548 개의 격자점으로 구성된다. 점성 격자층의 초기 두께는 10
-3이 고, 1.25의 두께비로 20개의 격자층을 생성하였다. 그리고 유 영 운동에 따른 와류를 정확하게 포착하기 위해 Fig. 12와 같 이 후류 영역에 조밀한 격자를 분포시켰다.
계산은 ball-vertex 스프링 상사성 기법을 적용한 비압축성 점성 유동 해석 코드를 이용하여 수행되었다. 수렴된 정상해 로부터 비정상 계산을 시작하였으며, 무차원 시간 간격 5×10
-4으로 5000번의 시간전진을 통해 다섯 주기 동안에 대한 해석 을 수행하였다. 첫 주기 동안에는 수치해의 안정성을 위해 유 영 운동의 진폭을 점진적으로 증가시켰다. 수렴된 공력 계수 는 세 주기 이후부터 얻을 수 있었다.
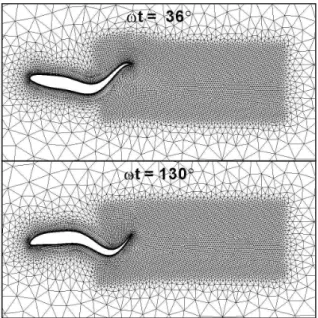
Fig. 13 은 유영 운동에 의해 변형된 격자를 나타내고 있으 며, 최대 변위가 시위길이의 20%정도인 경우에도 강건하게 격자가 변형되고 있음을 확인할 수 있다. 그림에서 는
를 의미한다. Fig. 14는 마지막 다섯 번째 주기에서의 비정상
양력 및 항력 곡선을 나타낸 것이다. 한 주기 동안의 유영 운
동은 상하 대칭 형태를 가지므로 한 주기 동안 발생하는 전
체 양력은 0이고 한 번의 양력 요동만 발생한다. 항력은 항상
(a) steady state
(b) unsteady undulatory motion
Fig. 19 Comparison of u-velocity contours between steady and unsteady states
Fig. 16 Comparison of unsteady drag coefficients during a period
Fig. 17 Instantaneous pressure contours when minimum or maximum thrust occurs
Fig. 18 Instantaneous vorticity contours when maximum thrust occurs
음의 값을 가짐을 확인할 수 있으며, 이는 물고기의 유영 운 동에 의해 추력이 발생함을 의미한다. 그리고 꼬리를 상하로 칠 때마다 추력이 증가하는 형태를 보이므로 한 주기에 두 번의 추력 요동이 발생한다. 더욱이 꼬리에서 발생한 와류가 후류로 박리될 때 급격히 추력이 증가하는 피크 현상도 발생 한다. 와류의 박리에 의해 발생하는 추력 피크는 꼬리가 위로 칠 때와 아래로 칠 때 서로 다른 위상에서 발생하고 그 크기
또한 다르다. 이는 비정렬 격자의 특성상 나타나는 격자의 비 대칭성에 의해 발생하는 현상이다. Fig. 15는 동일한 격자를 상하로 대칭시킨 후 계산을 수행한 결과와 공력 계수를 비교 한 것이다. 원격자와 대칭시킨 이후의 격자는 한 주기에서 상 이하게 발생한 추력 피크가 서로 상반되게 나타났다. 이로부 터 격자의 상하 비대칭성에 의해 추력 피크가 발생하는 시점 과 크기가 달라짐을 확인하였다.
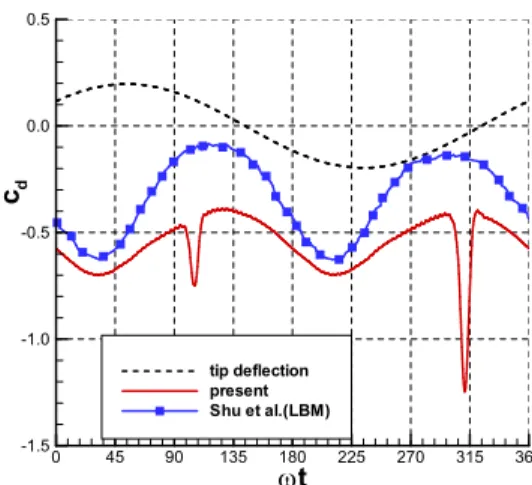
Fig. 16 은 비정상 항력 곡선을 Shu 등[22]의 결과와 비교한 것이다. Shu 등은 non-slip 조건을 엄밀하게 부과하기 힘든 LBM(Lattice Boltzmann Method) 를 움직이는 경계에 적용하기 위해 가상 경계법(IBM, Immersed Boundary Method)의 개념을 도입하여 LB-IBVCM(Lattice Boltzmann-Immerse Boundary Velocity Correction Method) 를 개발하였으며, 이를 이용하여 물고기의 유영 운동 문제를 해석하였다. 추력이 한 주기내에 서 두 번 요동치는 특성은 Shu 등의 결과와 유사하게 나타나 나 본 연구에서의 계산 결과가 전반적으로 더 높은 추력을 예측하고 있으며, 와류가 꼬리에서 떨어질 때 발생하는 급격 한 추력의 증가현상이 Shu 등의 결과에서는 나타나지 않는다.
이와 같은 두 해석 결과의 차이는 LBM과 Navier-Stokes 방정 식에 기반한 수치 기법의 차이로부터 기인된 것으로 판단된다.
Fig. 17 은 최대 추력이 발생하는 시점인 가 36도가 될
때와 최소 추력이 발생하는 시점인 130도일 때의 등압력선도
를 나타낸 것이다. 대부분의 추력은 꼬리부분에서 발생하며
Fig. 21 Unstructured hybrid meshes for the simulation of a generic fighter with flapping wing
Fig. 20 Deflection of a cantilevered beam with uniform load
Fig. 22 Maximum deflection of the flapping wing
꼬리부분의 파형 운동(undulatory motion) 형태에 따라 최대 또 는 최소 추력이 발생하는 시점이 결정됨을 확인할 수 있다.
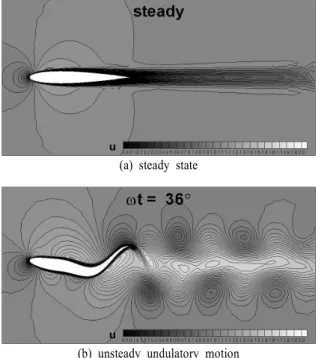
Fig. 18 은 한 주기 내에서 최대 추력이 발생하는 두 시점에서 의 와류 분포도를 나타낸 것이다. 여기서 실선은 시계 방향으 로 회전하는 와류를 나타내고, 점선은 시계 반대 방향으로 회 전하는 와류를 나타내고 있다. 에어포일 윗면에서 나타나는 시계방향의 전단(shear) 유동이 꼬리가 위로 칠 때 같은 방향 의 와류로 생성되어 박리되며, 꼬리가 아래로 칠 때는 이와 반대 방향의 와류가 박리된다. 시계방향의 와류는 에어포일의 아래에서 후류로 전파되고 반시계방향의 와류는 에어포일의 위에서 후류로 전파된다. 이렇게 번갈아 가며 반대 방향으로 발생한 와류의 영향으로 에어포일 후류에서는 자유류보다 속 도가 큰 제트 흐름이 생성되게 된다. 이러한 제트 흐름은 Fig.
19(b) 의 축방향 속도 분포에서 확연히 나타난다. Fig. 19(a)는 유영 운동이 없는 정상해에 대한 축방향 속도 분포를 나타내 고 있다. 유영 운동이 없는 에어포일 후류는 물체의 표면 마 찰력에 의해 자유류보다 낮은 속도를 가지게 되어 항력이 발 생하나, 유영 운동을 하게 되면 에어포일 후류에서 자유류보 다 높은 속도의 제트 흐름이 발생하여 추력이 발생하게 된다.
4.3 플래핑 운동하는 전투기 형상에 대한 유동 해석
격자 변형 기법을 이용하여 주기적으로 플래핑(flapping) 운 동하는 전투기 형상에 대한 비정상 해석을 수행하였다. 다음 과 같이 조화 함수로 정의되는 플래핑 운동을 계산에 사용하 였다.
sin (20)
여기서
는 플래핑 운동에 따른 변위,
은 진 폭, 그리고 는 주파수를 의미하고, 주파수는 0.5의 값을 가 진다. 균일한 하중이 빔(beam)에 주어졌을 때의 변위는 Fig.
20 에서와 같이 사차 다항식으로 표현되므로, 본 연구에서는 주날개 플래핑 운동의 진폭
를 다음과 같이 빔의 변위와 동일한 형태로 가정하였다.
(21)
여기서
은 날개 뿌리로부터의 상대적인 스팬 길이를 의 미하고,
는 날개 뿌리와 끝단 사이의 길이를 의미한다. 그 리고
는 끝단에서의 최대 변위가 시위길이의 2.5%가 되도 록 결정되었다.
전형적인 전투기 형상에 대해 생성된 비정렬 격자계는 1,714,925 개의 프리즘과 2,063,407개의 사면체 격자 요소를 가 지고 1,238,452개의 격자점으로 구성된다. 그리고 점성 격자층 의 초기 두께는 10
-5이고, 1.25의 두께비로 25개의 격자층을 생성하였다. 주날개의 플래핑 운동에 의해 발생하는 와류를 정확하게 포착하기 위해 후류 영역에 조밀한 격자를 분포시 켰으며, 이를 Fig. 21에 나타내었다. 전투기 형상은 대칭 조건 을 부과하여 좌측 부분에 대해서만 계산하였으며, 엔진 출입 구에서는 유출입 질유량이 동일하도록 경계조건을 부과하였다.
계산은 ball-vertex 스프링 격자변형 기법을 적용한 비압축
y/b=0.95 y/b=0.35
y/b=0.45 y/b=0.55
y/b=0.65 y/b=0.75
y/b=0.85
Fig. 24 Section profiles of the wing(washout)
wt
CL CD tipdeflection
0 90 180 270 360
0.01 0.02 0.03 0.04
0.015 0.0152 0.0154 0.0156
-0.025 -0.0125 0 0.0125 0.025 tip deflection CL CD
(a) time variations of aerodynamic coefficients
C
DC
L0.01450 0.015 0.0155 0.016
0.01 0.02 0.03 0.04 0.05
unsteady hysterysis steady solution
wt = 0 ° wt = 90 °
wt = 180 °
wt = 270 °
(b) drag coefficient vs. lift coefficient
Fig. 23 Variations of unsteady aerodynamic forces due to wing flapping
x/c Cp
0 0 .25 0 .5 0 .7 5 1
-0 .6
-0 .4
-0 .2
0
0 .2
0 .4
0 .6
uppe r lower airfoil
y/b=0.85
wt = 0 °
V
¥w
- &
relV a < 0
x/c Cp
0 0 .25 0 .5 0 .7 5 1
-0 .6
-0 .4
-0 .2
0
0 .2
0 .4
0 .6
wt = 180 °
V
¥w - &
V
rela > 0
Fig. 25 Instantaneous pressure distributions at a section of y/b=0.85
성 점성 유동 해석 코드를 이용하여 수행되었다. 계산에 사용 된 유동 조건은 자유류 마하수 0.85, 받음각 0.09도, 레이놀즈 수는 2.5×10
6이다. 충분히 정상해로 수렴시킨 후 플래핑 운동 을 포함하는 비정상 계산을 시작하였으며, 무차원 시간 간격
0.01 로 1000번의 시간전진을 통해 다섯 주기 동안에 대한 해 석을 수행하였다. 첫번째 주기에서는 수치해의 안정성을 위해 플래핑 운동의 진폭을 점진적으로 증가시키면서 계산하였으 며, 세 주기 이후부터는 수렴된 공력 계수를 얻을 수 있었다.
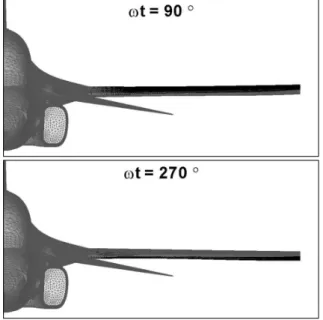
Fig. 22 는 플래핑 운동에 의해 변형된 표면 격자를 나타내 고 있으며, 복잡한 전기체 형상에 대해서도 음의 체적 격자가 발생하지 않고 원활하게 격자 변형이 수행됨을 확인하였다.
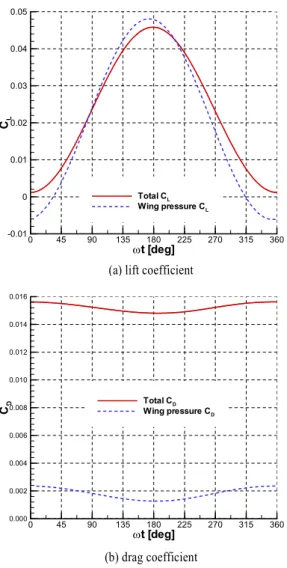
Fig. 23 은 마지막 다섯 번째 주기에서 시간에 대한 공력 계수 의 변화와 플래핑 운동에 따른 양력계수-항력계수 그래프를 나타낸 것이다. 플래핑 운동은 날개의 받음각을 변화시키는 요인이 되며, 받음각 는 플래핑 변위의 시간 변화량 에 반비례한다. 즉, ∝ 이다. 또한 양력 계수
은 받음 각 에 비례하므로 플래핑 운동에 따른 양력 계수는 다음의 관계를 가진다.
∝ (22)
Fig. 23(a) 의 비정상 양력 곡선은 변위의 미분값인 cosine
함수와 상하 대칭 형태를 지니므로 식 (19)의 관계와 동일한
경향을 보인다. 항력 곡선은 양력 곡선과 대칭되는 형태가 나
타나며, 이는 Fig. 23(b)에서 알 수 있듯이 항력계수와 양력계
수는 서로 반비례하는 관계임을 의미한다. 그러나 일반적인
에어포일에서의 항력은 양력의 제곱에 비례하는 관계를 가진
wt [deg]
CL
0 45 90 135 180 225 270 315 360
-0.01 0 0.01 0.02 0.03 0.04 0.05
Total CL Wing pressure CL
(a) lift coefficient
wt [deg]
CD
0 45 90 135 180 225 270 315 360
0.000 0.002 0.004 0.006 0.008 0.010 0.012 0.014 0.016
Total CD Wing pressure CD
(b) drag coefficient
Fig. 26 Unsteady wing pressure force and total force coefficients
Fig. 27 Surface pressure distributions, sonic iso-surfaces, and x-directional vorticity slices when minimum or maximum lift occurs
다. 일반적인 에어포일과 상반되는 전투기의 항력-양력 특성 은 날개의 비틀림(twist)과 에어포일 형상의 차이에서 기인된 다. Fig. 24는 날개 각 단면의 형상을 나타낸 것으로 끝단으로 갈수록 낮은 붙임각(incidence angle)을 가지는 washout 형태의 비틀림이 주어져 있다. Fig. 25는 음의 붙임각을 가지는 85%
스팬 지점에서의 압력 계수 분포를 가 0도인 경우와 180도 가 되는 경우에 대해 나타낸 것이다. 가 0도인 경우는 플 래핑 운동에 의해 받음각이 가장 작아지는 시점으로 양력은 최소가 된다. 가 180도인 경우는 이와 반대로 받음각이 가 장 커져 양력이 최대가 되는 시점이다. 가 0도에서는 음의 붙임각과 플래핑에 의한 음의 받음각 영향으로 앞전 부근 아 랫면에서 가장 큰 압력강하가 나타나 양력은 감소하고 항력 은 증가하게 된다. 가 180도에서는 플래핑에 의해 받음각 이 증가되어 유효받음각은 거의 0도 이다. 이러한 상황에서
0.5 시위길이 이후에서 가장 큰 윗면 곡률을 가지는 에어포일 형상 특성에 의해 윗면 뒷전 부근에서 압력강하가 가장 크게 나타나게 되어, 양력은 증가하고 항력은 감소하는 특성을 가 진다. Fig. 26은 주날개 영역에서의 압력을 적분하여 구한 양 력과 항력을 전체 양력과 항력에 대해 비교하여 나타낸 것으 로, 대부분의 양력은 주날개의 압력에 의해 발생하는 것을 알 수 있다. 주날개의 압력에 의한 항력은 전체 항력의 약 1/7에 불과하나, 플래핑에 의해 발생하는 전체 항력 요동의 진폭은 주날개의 압력에 의한 항력 요동 진폭과 거의 동일함을 확인 할 수 있다. 이는 날개 단면에서의 압력 분포의 변화가 플래 핑에 의해 발생하는 전체 양력 및 항력 요동의 주요 원인이 된다는 논의가 타당함을 입증하는 것이다.
Fig. 27 과 28은 가장 낮은 양력이 나타나는 가 0도인 경 우와 가장 높은 양력이 발생하는 가 180도인 경우에 대해 표면 압력 분포와, 등음속면(sonic iso-surface), 그리고 주날개 단면 및 후류에서 와도를 나타낸 것이다. x방향의 와도는 Fig.
27 에 나타내었으며, y방향의 와도는 Fig. 28에 나타내었다. 양 력이 최소가 되는 가 0인 시점에서는 날개 윗면의 압력 강 하가 작아 초음속 영역이 최소가 되나, 양력이 최대가 되는
가 180도인 시점에서는 날개 윗면에서의 압력 강하가 매우
Fig. 28 Surface pressure distributions, sonic iso-surfaces, and y-directional vorticity slices when minimum or maximum lift occurs
커 초음속 영역이 최대가 된다. 날개가 위로 플래핑하는 경우 에서는 끝단에서 음의 양력이 발생하여 윗면에서 아랫면으로 회전하는 끝단 와류가 발생하고, 날개가 아래로 플래핑하는 경우에서는 그 반대로 아랫면에서 윗면으로 회전하는 끝단 와류가 발생한다. 이와 같은 주기적은 플래핑 운동에 의해 서 로 반대 방향의 끝단와류가 반복적으로 생성되어 후류로 빠 져나감을 확인할 수 있다. 그리고 날개가 위로 플래핑 하는 경우는 윗면에서 발생한 전단 유동이 양의 y방향 와류로 생 성되어 날개 뒷전에서 박리되며, 날개가 아래로 플래핑 하는 경우에서는 아랫면에서 발생한 전단 유동이 음의 y방향 와류 로 생성되어 박리된다.
5. 결 론
본 연구에서는 기 개발된 압축성/비압축성 점성 유동 해석 프로그램을 기반으로 격자 변형 기법을 비정렬 혼합 격자계 에 적용하여 물체 표면이 변형하는 문제나 미소 변위의 상대 운동 해석이 가능한 비정상 유동 해석 프로그램을 개발하였 다. 비정렬 격자 변형 기법으로 널리 사용되고 있는 선형 스 프링, 비틀림 스프링, 그리고 ball-vertex 스프링 기법의 장단점
에 대해 논의하였으며, 각 기법을 180도로 피칭운동하는 이차 원 NACA0012 에어포일 문제에 적용하여 세 기법의 강건성을 테스트하였다. 선형 스프링에서는 쉽게 음의 체적이 생성되는 것을 확인하였으며, 비틀림 스프링과 ball-vertex 스프링에서는 과도한 물체의 변형에도 음의 체적을 방지할 수 있음을 확인 하였다. 그리고 삼각형 외접원과 내접원의 비와 최대 최소각 의 비를 사용하여 격자 변형에 따른 격자질을 정량화하였으 며, ball-vertex 스프링에서의 격자질 저하가 가장 적음을 확인 하였다. 점성 해석을 위해 요구되는 프리즘 또는 육면체의 격 자 변형은 가장 강건한 방법인 ball-vertex 스프링을 사용하여 도 높은 종횡비로 인해 음의 체적이 발생할 수 있다. 그러므 로, 본연구에서는 프리즘과 육면체로 구성되는 점성 격자는 음의 체적을 방지하기 위해 수직 모서리 벡터의 기저 분할에 기반한 대수적인 방법을 적용하였으며, 사면체와 피라미드로 구성되는 비점성 격자에 대하서는 ball-vertex 스프링 기법을 이용하여 격자를 변형하였다.
격자 변형 기법이 적용된 점성 유동 해석 프로그램을 이용 하여 실험치가 존재하는 NACA0012 에어포일 형상이 주기적 으로 피칭운동하는 문제에 대한 점성 해석을 수행하였으며, 전체 격자를 강체로 움직인 해석결과를 비교함으로써 유동 해석 프로그램에 적용된 격자 변형 기법을 검증하였다. 그리 고 개발된 격자 변형 기법의 강건성을 확인하기 위해 물체 표면 자체가 변형되며 그 변위 또한 상대적으로 큰 물고기가 유영 운동하는 문제에 대한 해석을 수행하였다. 마지막으로 복잡한 전투기 형상에서 주날개가 플래핑 운동하는 문제를 격자 변형 기법을 이용하여 해석하였으며, 플래핑 운동에 따 른 공력 성능 및 유동 특성을 파악하였다.
강건한 격자 변형 기법이 적용된 점성 유동 해석 프로그램 의 개발로 공력에 의해 대규모 변형이 발생하는 헬리콥터 블 레이드 유동 해석뿐만 아니라 자유 표면 운동, 형상 최적화, 그리고 조종면의 상대 운동 해석 등 광범위한 비정상 유동 해석이 가능할 것으로 기대된다.
후 기
본 연구는 방위사업청과 국방과학연구소의 지원으로 수행 되었으며, 이에 대해 깊이 감사를 드립니다. (계약번호 UD070041AD)
참고문헌