연구논문 Journal of Drive and Control, Vol.17 No.3 pp.33-46 Sep. 2020
ISSN 2671-7972(print) ISSN 2671-7980(online) http://dx.doi.org/10.7839/ksfc.2020.17.3.033
웨어러블 조작기 기반 재난․재해 특수 목적기계 다관절 작업기의 가상 환경 작업시스템 구현
Implementation of Virtual Environment System for Multi-joint Manipulator Designed for Special Purpose Equipment with
Wearable Joystick used in Disaster Response
차영택
1․이연호
1․최성준
1*Young Taek Cha
1, Yeon Ho Lee
1and Sung Joon Choi
1*Received: 23 Apr. 2020, Revised: 31 Jul. 2020, Accepted: 19 Aug. 2020
Key Words:Special Purpose Equipment Responding Disasters(재난․재해 특수 목적기계), 6-axis Multi-joint
Manipulator(6축 다관절 작업기), Virtual Environment(가상 환경), Master-slave Operation System(마 스터슬레이브 조작시스템), Wearable Joystick(웨어러블 조작기)
Abstract: We introduce a piece of special-purpose equipment for responding to disasters that has a dual-arm
manipulator consisting of six-axis multi joints, and a master-slave operating system controlled by a wearable joystick for intuitive and convenient operation. However, due to the complexity and diversity of a disaster environment, training and suitable training means are needed to improve the interaction between the driver and equipment. Therefore, in this paper, a system that can improve the operator’s immersion in the training simulation is proposes, this system is implemented in a virtual environment. The implemented system consists of a cabin installed with the master-slave operation system, a motion platform, visual and sound systems, as well as a real-time simulation device. This whole system was completed by applying various techniques such as a statistical mapping method, inverse kinematics, and a real-time physical model. Then, the implemented system was evaluated from a point of view of the appropriateness of the mapping method, inverse kinematics, the feasibility for real-time simulations of the physical environment through some task mode.
* Corresponding author: [email protected]
1 Construction Equipment Technology Center, Korea Institute of Industrial Technology, Gyeongsan 38408, Korea
Copyright Ⓒ 2020, KSFC
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
기호 설명
: i
thjoint variable of master
: i
thjoint variable of slave
: reference coordinate
: working range coordinate of master
: working range coordinate of slave
: i
thcoordinate used for sphere least square method
: center coordinate calculated by the sphere least square method
: radius calculated by the sphere least square method
: center coordinate of master working range by the sphere least square method
: center coordinate of slave working range by the sphere least square method
: working range coordinate of master
: pseudo inverse matrix of A
: radius of master working range by the sphere
least square method
: radius of slave working range by the sphere least square method
: the standard deviation of slave working range
: the gain of the standard deviation of slave working range
: modified working range coordinate of the master
: modified working range coordinate of the slave
: offset distance of {s
0} coordinate respect to {s
c} center coordinate of slave calculated by the sphere least square method
: x-direction pose vector of i
thjoint of the slave
: x-direction pose vector of
ithjoint of the master
: z-direction link length of i
thjoint of the slave
: x-direction link length of i
thjoint of the master
: joint variable error of the slave
: input signal of hydraulic valve
: proportional gain of PI controller
: integral gain of PI controller
: anti wind-up gain
: i
thcylinder velocity for graphic rendering
: i
thcylinder displacement calculated by the real-time simulation
: i
thgraphic rendering time
1. 서 론
마스터-슬레이브를 활용한 조작시스템은 재난 환 경에서의 구호나 로봇을 이용한 수술과 같이, 작업이 위험하거나 예측 불가능하여 로봇에 의한 자동화 작 업이 적용되기 어려운 곳에 활용되어져 왔다.
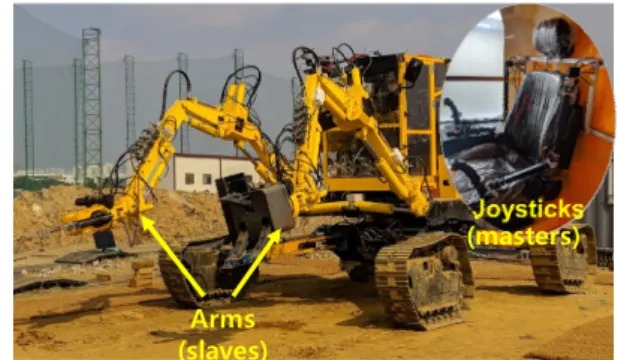
1,2)이러 한 조작 시스템은 사람의 직관적 인지와 판단을 로 봇 작업에 적용함으로써, 비정형화되고 작업조건이 제한된 환경에 대응하여 유연하고 신속한 작업이 가 능하다는 장점을 가지고 있다. 특히, 재난재해 환경 의 복구나 인명의 구조를 위한 작업에서는 Sacros사 의 Guardian GT나 Tmsuk사의 T-54 Enryu와 같이, 운 전자의 직관적인 작업을 위해 사람의 팔과 유사한 양팔의 구조를 가진 작업기(슬레이브)와 웨어러블 형 태의 조작기(마스터)기가 채용되고 있다. 최근 국내
(slaves)Arms
Joysticks (masters)
Fig. 1 Master-slave operation system of special purpose responding disasters
에서도 재난⋅재해 환경의 구호작업을 위해 Fig. 1과 같은 특수목적 기계가 개발되고 있으며, 양팔 구조의 6축 다관절 매니퓰레이터(슬레이브)와 웨어러블 조작 기(마스터)가 적용되어 개발되고 있다.
3)하지만, 이러 한 마스터-슬레이브 구조를 적용하더라도 운전자는 직교 좌표 공간에서 일하는 것이 효율적인 반면, 작 업기는 관절 공간에서 제어되므로, 재난환경의 복잡 하고 다양한 작업에 대응하기 위해서는 운전자와 장 비 간의 상호작용을 향상할 수 있는 훈련과 훈련 수 단을 필요로 한다.
4)이렇게 재난⋅재해 환경에서의 작업에 운전자와 장비 간의 상호작용이 중요한 이유는 제어 루프 (Loop) 안에 운전자가 있는 Human-In-The-Loop(HITL) 제어 방식을 취하고 있기 때문이며,
5,6)재난·재해 특 수목적 기계뿐만 아니라 굴삭기와 같이 운전자가 직 접 장비의 상태를 보면서 제어하는 대부분의 건설장 비가 HITL 제어 방식을 채택하고 있다. 재난 구호장 비 및 굴삭기 분야에서의 운전자 및 장비 간의 상호 작용과 관련된 연구들은 다음과 같이 진행되었다.
Hitachi사에서 개발한 재해복구용 장비인 ASTACO
(Advanced System with Twin Arms for Complex
Operations)에는 운전자의 조작 피로도를 줄이기 위해
양팔 구조를 가지면서도 각 관절의 속도를 제어할
수 있는 조작기가 적용되었으며,
7)Mitsuhiro 등은
ODE(Open Dynamics Engine)를 적용한 가상 환경을
이용하여 양팔 구조의 건설장비 조정 훈련이 가능한
시뮬레이터를 개발하였다.
8)Kim 등은 운전자 팔에
센서들을 부착하여 운전자의 팔 동작과 굴삭기의 동
작을 관절 공간에서 매핑하여 기존의 조작기보다 직
관적인 작업이 가능한 조작 시스템을 개발하였으며,
9)Yoon 등은 백호(Backhoe)의 직관적인 조작을 위해
원통 좌표계(Cylinderical coordinate system)기반의 속
도제어 조작기 개발에 대한 연구를 진행하였다.
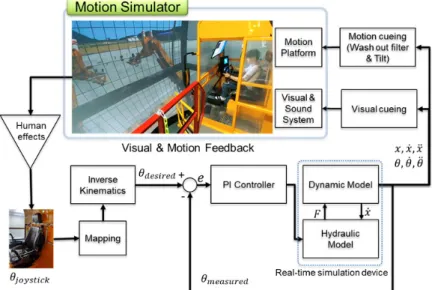
10)Fig. 2 Concept of master-slave operation system implemented on virtual environment Michale등은 가상 환경에 시리얼 로봇기반의 모션 플
랫폼을 적용한 RODOS(RObot-based Driving and Operation Simulator)를 개발하였으며, 운전자 훈련 시 의 몰입감 향상을 위해 실시간 물리 모델(동역학 및 유압)을 적용하였다.
11)이러한 운전자와 장비 간의 상호작용을 향상시킬 수 있는 연구들은 운전자의 조 작 직관성 향상을 위한 조작기 개발부분과 운전자의 훈련 몰입도 향상을 위한 가상 환경 구현 부분으로 나누어진다. 조작 직관성 향상을 위한 연구들에서는 작업기와 조작기의 기구적 구조가 동일하지 않은 경 우에서의 직관적 조작 향상을 위한 연구들이 주로 행해졌으며, 가상 환경 구현 부분에서는 모션 플랫폼 및 비주얼 시스템 등의 하드웨어뿐만 아니라 실시간 해석 모델을 적용함으로써 운전자의 몰입감을 향상 시키기 위한 연구들이 새롭게 시도되고 있다. 현재 개발 중인 재난·재해 특수목적 기계에서도 운전자의 직관적 조작 향상을 위해 마스터-슬레이브 조작 시스 템을 채용하고 있지만, 마스터와 슬레이브의 기구적 구조가 다르고, 운전자의 대부분이 초심자이므로, 운 전자와 장비 간의 원활한 상호작용을 위해 운전자의 적응 훈련 및 조작 시스템의 개선을 필요로 한다. 또 한, 일반적으로 많이 사용되는 건설장비와는 달리 장 비의 수가 제한되어 있으므로, 시간과 비용 측면에서 이러한 부분을 해결하기 위한 효율적인 방법들 중 하나로써, 가상 환경을 이용한 사전 작업 훈련시스템 의 도입을 고려해 볼 수 있다. 하지만, 웨어러블 형 태의 마스터-슬레이브 조작 구조를 가지고 있으면서 도, RODOS와 같이 운전자 훈련의 몰입감을 위해 모 션 플랫폼과 물리 모델(동역학 및 유압)해석을 실시
간으로 연동하여 가상 환경에서 구현한 사례는 아직 까지 없다.
따라서, 본 논문에서는 특수목적 기계의 마스터-슬 레이브 조작 훈련이 가능한 가상 환경 작업시스템을 개발하고자 하였으며, 다음과 같이 구현하였다. 구현 된 가상 환경 상에서의 마스터-슬레이브 조작 시스템 은 Fig. 2와 같이 마스터-슬레이브 조작기가 설치된 캐빈(Cabin)과 조작자에게 동작감을 줄 수 있는 모션 플랫폼(Motion platform), 조작자에게 시각 정보 및 청 각 정보를 줄 수 있는 비주얼(Visual) 및 음향 시스 템, 동역학과 유압 모델이 포함된 물리 모델의 실시 간 해석 장치로 구성된다. 이때, 조작자의 조작과 물 리 모델의 해석이 서로 연동되어야 하므로, 물리 모 델의 해석은 엄격한 실시간성을 요구한다. 가상 환경 상에서 구현되는 마스터-슬레이브 조작 시스템은 마 스터의 위치와 자세에 대해 슬레이브가 추종하는 방 식을 채택하였으며, 가동 영역 매핑을 위해 간단한 통계적 방법을 제안하여 적용되었다. Fig. 2와 같이 매핑된 마스터의 위치와 자세는 역기구학을 통해 슬 레이브의 각 관절 값을 계산하는 데 사용되며, 계산 된 슬레이브의 관절 값은 동역학 및 유압 모델에 적 용되어, 모션 플랫폼과 비주얼 시스템을 통해 조작자 에게 동작감과 시각적 정보를 제공한다. 이러한 정보 를 기반으로 조작자는 가상 환경 상에서 마스터를 조작하며, 다시 조작된 마스터의 위치와 자세는 위의 과정을 반복하여 조작자에게 동작감과 시각적 정보 를 제공한다.
최종적으로, 구현된 시스템은 특수목적 기계의 특
정 작업 동작을 통해서 평가되었으며, 동작 중 슬레
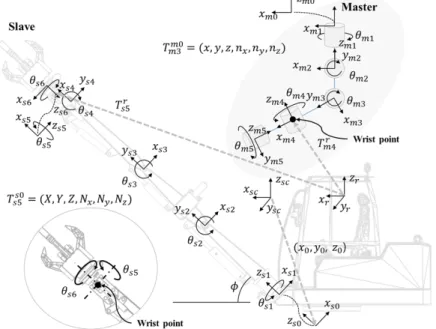
Fig. 3 Joint configurations of the master and slave systems(right arm) 이브 각 관절 값의 이상 유무와 물리 모델 해석의 실
시간성 및 발산 유무를 통해 마스터-슬레이브 조작 시스템이 가상 환경상에 적절히 구현되었음을 확인 하였다.
2. 마스터-슬레이브 가동 영역 매핑
마스터와 슬레이브의 매핑은 마스터 조작에 대한 슬레이브의 각 관절 값을 계산하기 위해 사용되며, 본 논문에서는 Fig. 3과 같이 마스터와 슬레이브 각 끝단으로부터 가장 가까운 2개의 회전 관절 중심축 이 교차하는 손목 점(wrist point)을 기준으로 분리하 여 진행하였다. 슬레이브의 끝단에서 손목 점까지의 2개 관절들에 대해서는 마스터의 끝단에서 손목 점 까지의 2개 관절 값을 직접 입력하였으며, 나머지 관 절 값들은 마스터-슬레이브 가동 영역 매핑 및 역기 구학을 사용하여 계산하였다.
이렇게 분리하는 적용하는 이유는 마스터 끝단 2 개의 관절이 조작자의 손목에 의해서만 조작되고, 슬 레이브 끝단 2개의 관절이 마스터의 끝단의 2개의 관절과 동일한 기구학적 구조를 가지고 있으므로, 조 작자의 손목 자세에 대한 마스터의 관절 값들을 슬 레이브에 직접 입력함으로써 조작자가 관절 공간에 서 직관적으로 슬레이브의 손목 자세를 제어할 수 있기 때문이다. 또한, 일반적으로 6축 다관절의 역기 구학 풀이를 적용하더라도, 자코비안(Jacobian)을 이 용한 수치적 역기구학을 적용하면 6개의 관절에 대
한 역기구학 해를 동시에 풀 수는 있지만, 연산량이 많은 것과 특이점 부근에서의 성능 악화 문제를 고 려하여 적용하여야 하고,
12)해석적 역기구학을 적용 하더라도 5개의 독립적인 역기구학 식만 가지므로 6 개의 슬레이브의 관절 값들을 동시에 계산하기 어려 운 단점을 가진다.
13,14)따라서, 앞서 기술한 손목 점 을 기준으로 분리하여 손목 점 앞단 4개의 슬레이브 관절에 대해서만 해석적 역기구학을 진행하고, 손목 점 뒷단 슬레이브 5번, 6번 관절에 마스터 4번, 5번 관절의 값을 각 각 직접 입력한다면, 오차가 작으면 서도 실시간성이 높은 역기구학 해를 제공할 수 있 는 장점을 가지게 된다.
슬레이브에 대한 마스터의 가동영역 매핑의 자세
한 과정은 다음과 같다. Fig. 3에 나타나 있는 기준
좌표계(r)에 대한 마스터 4번 링크 끝단 좌표와 기준
좌표계(r)에 대한 슬레이브 5번 링크 끝단 좌표에 대
한 가동 영역을 매핑하고자 하였으며, Fig. 4와 같이
마스터 및 슬레이브 각 관절의 크기와 구조 차이로
인해 직접적인 매핑이 불가하다. 일반적으로 이러한
문제를 해결하기 위해서는 슬레이브 가동 영역에 특
정한 값을 곱하는 스케일드 매핑(Scaled Mapping) 방
법이 사용되지만,
15)단순한 스케일링은 마스터와 슬
레이브의 기구학적 구조가 다르기 때문에, Fig. 5와
같이 슬레이브의 가동 영역이 마스터의 가동 영역을
포함하지 못하게 되며, 이를 해결하기 위해 스케일링
뿐만 아니라 오프셋을 추가하여 매핑하여야 한다. 스
케일링과 오프셋을 병합한 매핑은 다수의 시행 오차
Fig. 4 Working range of master and slave (right arm)
Fig. 5 Working range of scaled master and slave right arm)
를 겪어야 하는 불리함이 있으며, 본 논문에서는 이 러한 시행착오를 줄이기 위해 구형 최소자승법을 사 용하여 마스터 가동 영역에 대한 스케일 값과 오프 셋 값을 계산하였다.
x(m) y(m)
z(m)
, , )
Fig. 6 Working range of master(right arm)
, , )
y(m) x(m) z(m)
Fig. 7 Working range of slave(right arm)
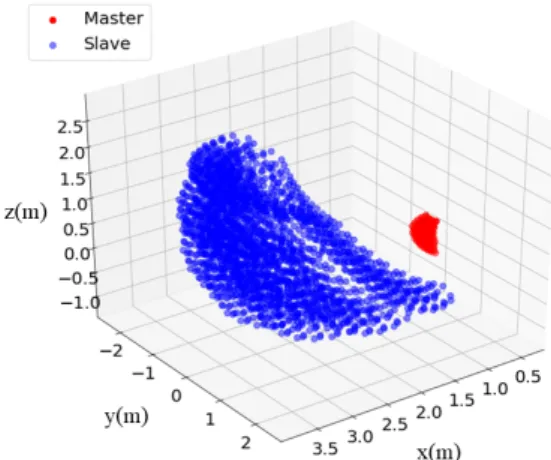
마스터와 슬레이브의 관절이 모두 회전 조인트로 이루어져 있을 경우, 마스터와 슬레이브의 가동 영 역은 Fig. 6~7과 같이 구형과 유사한 형태를 지니게 된다.
이 점을 이용하여 식 1에서 4와 같이 각각 구형 최소자승법을 적용하면, 각 가동 영역을 반영하는 구 의 중심 좌표와 반경을 계산할 수 있게 된다. 구형 최소자승법을 사용한 가동 영역의 중심 좌표와 반경 계산은 식 1과 같은 구 방정식을 식 2와 같이 정리하 여 식 3과 같은 선형 방정식을 만들고, 식 4와 같이 의사 역행렬을 취해줌으로써 구할 수 있다.
16)이 때,
는 식 4와 같이 마스터 또는 슬레이브의 가동 영 역의 좌표로 계산된 와 를 통해 계산되어지며, 구해진
의 1~3행은 각 가동 영역의 중심 좌표(
,
,
)를 의미하며,
의 4행과 1~3행으로부터 얻은
중심 좌표로 각 가동영역에 대한 반경(R)을 구할 수
있게 된다. 이를 이용하여 식 5에서 7과 같이 마스터
의 가동 영역에 대한 스케일링과 오프셋을 진행하여
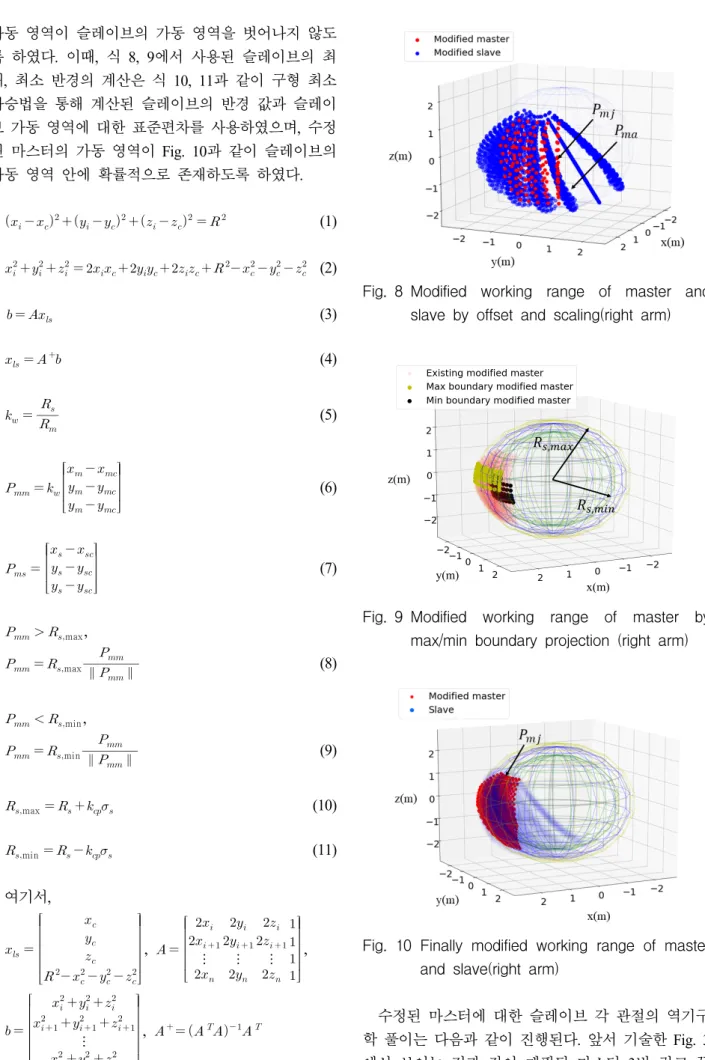
수정하였으며, Fig. 8과 같이 나타난다. 이때, 식 5에
서는 최소 자승법으로 구해진 마스터와 슬레이브의
반경 비를 구하고, 식 6은 마스터 각 좌표를 최소자
승법으로 구해진 중심 좌표만큼 오프셋 시킨 값에
식 5에서 구한 반경 비를 곱하여 마스터의 좌표 값
들을 수정한다. 식 7에서는 슬레이브 각 좌표를 최소
자승법으로 구해진 중심좌표만큼 오프셋 시켜 슬레
이브의 좌표 값을 보정하였으며, 식 6과 식 7에서 마
스터와 슬레이브의 좌표 값들을 각 중심좌표만큼 오
프셋 시키는 이유는 각 중심좌표를 원점으로 일치시
켜 매핑하기 위함이다. 또한, 슬레이브의 최대, 최소
반경을 벗어난 수정된 마스터의 좌표 값들에 대해서
는, 식 8, 9와 같이 각 각 슬레이브의 최대, 최소 반
경 표면에 투영시킴으로써, Fig. 9와 같이 마스터의
가동 영역이 슬레이브의 가동 영역을 벗어나지 않도 록 하였다. 이때, 식 8, 9에서 사용된 슬레이브의 최 대, 최소 반경의 계산은 식 10, 11과 같이 구형 최소 자승법을 통해 계산된 슬레이브의 반경 값과 슬레이 브 가동 영역에 대한 표준편차를 사용하였으며, 수정 된 마스터의 가동 영역이 Fig. 10과 같이 슬레이브의 가동 영역 안에 확률적으로 존재하도록 하였다.
(1)
(2)
(3)
(4)
(5)
(6)
(7)
max
,
max
∥∥
(8)
min
,
min
∥∥
(9)
max
(10)
min
(11)
여기서,
,
⋮ ⋮ ⋮
,
⋮
,
Fig. 8 Modified working range of master and slave by offset and scaling(right arm)
,
,
y(m) x(m) z(m)
Fig. 9 Modified working range of master by max/min boundary projection (right arm)
Fig. 10 Finally modified working range of master and slave(right arm)
수정된 마스터에 대한 슬레이브 각 관절의 역기구
학 풀이는 다음과 같이 진행된다. 앞서 기술한 Fig. 3
에서 보이는 것과 같이 매핑된 마스터 3번 링크 끝
단의 위치 및 x축 자세와 슬레이브 4번 링크 끝단의 위치 및 x축 자세를 식 12와 같이 일치시켰다. 슬레 이브 1~4관절까지의 관절 값의 계산하는데 있어서는 식 13~16과 같이 적용하였고, 슬레이브 5, 6번 관절 값은 식 17과 18에서 표현한 바와 같이 마스터 4, 5 번 관절 값을 그대로 사용하였다. 식 12에서 식 18까 지는 오른쪽 슬레이브에 대한 역기구학식이며, 왼쪽 슬레이브는 1번, 5번, 6번 관절에 대해서만 오른쪽 슬레이브와 대칭시켜 적용하였고, 2~4번 관절은 오른 쪽 슬레이브와 동일하게 적용하여 각 관절 값을 계 산하였다.
∙ ∙
∙
(12)
tan
(13)
sin
(14)
(15)
(16)
(17)
(18)
여기서,
cos sin
sin cos
cos sin
sin cos
cos
sin
cos
cos
sin
tan
tan sin
cos
역기구학 계산 시의 오류를 방지하기 위해 특이점 영역 회피를 고려하였으며, 수정된 마스터의 가동 영 역이 슬레이브 가동 영역의 경계를 벗어나는 경우와 연속되는 2개 이상의 슬레이브 링크가 일직선상에 존재하여 1개 이상의 슬레이브 관절이 자유도를 잃 는 경우가 없도록 하였다.
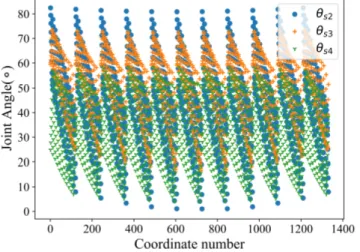
17)이를 위해 수정된 마스 터의 가동 영역이 슬레이브의 가동 영역 경계 내에 포함되도록 매핑하였으며, 슬레이브의 각 관절 값을 제한하여 매핑에 사용함으로써, 슬레이브 2~4번 관절 값이 0도가 되어 2개 이상의 슬레이브 링크가 일직 선상에 존재하는 경우가 없도록 하였다. 수정된 마스 터의 가동 영역이 슬레이브의 가동 영역 내에 포함 되는지에 대한 여부는 Fig. 10과 같이 앞서 기술되었 으며, Fig. 11과 같이 수정된 마스터의 가동 영역에 대해 역기구학으로 계산된 슬레이브의 2~4번 관절 값들의 최솟값이 1도이므로, 0도인 경우가 존재하지 않는다. 따라서, 앞서 기술한 두 가지 경우에 대한 역기구학 계산의 특이성을 회피한 것으로 판단된다.
이때, 슬레이브의 1번 관절은 2개 이상의 연속되는 슬레이브 링크가 일직선상에 존재하는데 기여하지 않으므로 특이성 분석에서 제외하였다.
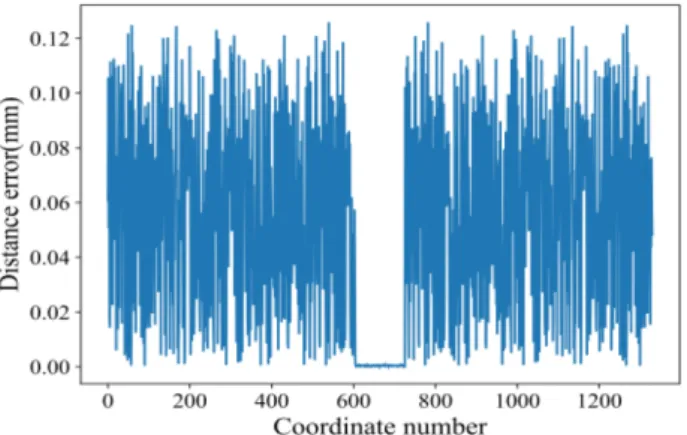
슬레이브 역기구학의 적절성을 판단하기 위해, 수 정된 마스터의 가동 영역 좌표와 역기구학을 실시하 여 얻은 관절 값들을 다시 정기구학에 적용하여 얻 은 슬레이브 좌표의 거리 오차를 Fig. 12와 같이 계
Fig. 11 Calculated angles by inverse kinematics
(right arm)
From10
Cylinder2
Fig. 13 Physical model for real-time simulation (right arm) Fig. 12 Distance error between modified coordinate
of master and calculated coordinate of slave in modified working range(right arm)
산하였으며, 좌표 간의 최대오차가 0.13mm 이내로 목표 허용오차 2.2mm 이내를 충족함으로써, 역기구 학이 적절히 수행되었음을 확인하였다. 이때, 목표 허용오차는 수정된 슬레이브의 작업 영역에서 최소 이송거리(2.2m)의 0.1%로 설정하였다.
3. 실시간 물리모델 및 제어기
마스터-슬레이브 매핑 및 역기구학을 통해 계산된
슬레이브의 각 관절 값은 제어기의 추종 값으로써
사용되며, 제어기의 출력 값이 유압 및 동역학 모델
에 적용됨으로써, 가상 환경 상의 슬레이브가 조정된
다. 유압 모델은 Fig. 13과 같이 슬레이브의 각 관절
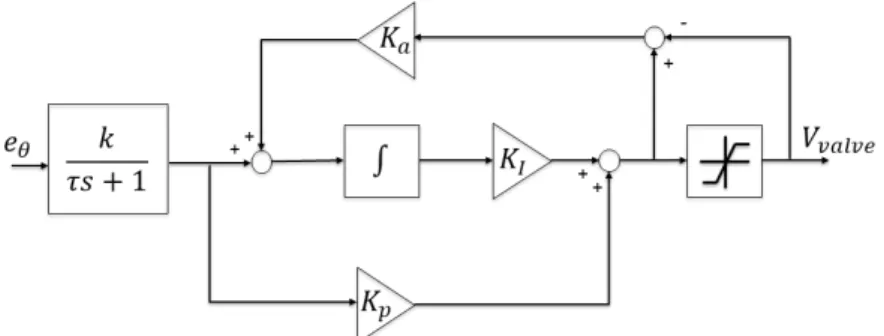
Fig. 14 Joint angle controller for hydraulic actuator applied on real-time simulation
을 움직이기 위해, 펌프, 밸브, 실린더, 탱크로 구성 되어있으며, 슬레이브를 추종 위치로 동작시키기 위 해 필요한 힘을 계산하여 동역학 모델에 전달한다.
조작자의 실시간 동작을 반영하기 위해, 유압 모델 은 간략화 되었으며, 유압 모델에는 Backward Euler, 동역학 모델에는 Runge-Kuta가 각 각 해석기(Solver) 로써 적용되었다. 이때, 유압과 동역학 모델링을 위 해 MATLAB Simscape Multibody와 Fluids가 사용되었 다. 엄격한 실시간성을 위해, 유압 및 동역학 모델은 MATLAB Simulink Real-Time을 통해 C 코드로 변환 되어, 실시간 타깃(Target) 머신에 적용되었으며, 각 물리 모델은 2.5ms의 시간 간격(Time step)으로 실행 된다.
슬레이브의 각 관절 값의 위치를 제어하기 위해서 Fig. 14와 같이 PI 제어기를 적용하였으며,
18)실린더 내에 삽입되어 있는 변위 센서로부터 실린더 스트로 크를 측정함으로써, 슬레이브 각 관절 각도를 계산하 여 제어기의 추종 입력으로 적용하였다. 또한, 마스 터의 잡음에 대한 슬레이브 동작의 영향을 줄이기 위해 1차 저주파 필터가 적용되었으며, 실린더를 제 어하는 유압밸브의 제어 입력 한계로 인해 발생하는 제어기의 불안정성을 해소하기 위해 Anti-windup 기 능을 추가하였다.
4. 비주얼 및 음향시스템
비주얼 시스템은 실시간 타깃 머신으로부터 슬레 이브 각 관절 구동 실린더의 변위 값을 전달받아 Fig. 15와 같이 16개의 빔 프로젝트가 360도 원형 돔 스크린에 영상을 투영함으로써 운전자에게 슬레이브 의 동작을 전달한다. 이때, 슬레이브의 동작 영상은 초기의 슬레이브 자세에서 그래픽 렌더링 시간 간격 당 실린더 변위의 증감분을 입력받으며, 실린더 변위 의 증감분을 기준으로 비주얼 시스템에서 각 그래픽
객체(Object)의 이동량을 계산함으로써 슬레이브의 동작 영상을 구현한다. 하지만, 실제 비주얼 시스템 을 통해 구현되는 그래픽 렌더링 주기는 그래픽 렌 더링 부하에 따라 약 16.6ms~20ms (50~60Hz)의 값의 가지며, 물리 모델 시간 간격 2.5ms과 다르므로, 물 리 모델 시간 간격에 따른 순차적인 실린더 변위 증 감분을 비주얼 시스템에 전달하는 경우, 물리 모델 동작 대비 지연된 그래픽 렌더링을 초래한다. 이러한 지연을 해소하기 위해, 물리 모델에서 구현되는 슬레 이브의 모든 동작을 비주얼 시스템에서 구현할 수는 없지만, 비주얼 시스템의 그래픽 렌더링 시간 간격마 다 물리 모델에서 계산된 각 실린더 변위를 전달받 아 식 19와 같이 그래픽 렌더링 시간 간격 당 실린더 변위의 증감분을 재계산하여 슬레이브의 동작을 구 현하는 속도로써 사용하였다.
음향 시스템의 구현을 위해서는 Fig. 19와 같이 캐 빈 내에 5.1 채널 스피커를 설치하였으며, 5톤 굴삭 기의 엔진음 및 실린더 구동음을 녹음하여 적용하였 다. 엔진음은 캐빈내 가변 저항 방식의 다이얼로그를 조작하여 엔진음의 주기와 소리를 조정할 수 있도록 하였으며, 실린더 구동음은 식 19에서의 그래픽 렌더 링 시간 간격 당 실린더 변위 증감분이 특정 값 이상 일 때 나타나도록 적용하였다.
Fig. 15 Visaul system for virtual environment
Fig. 18 Joint angles of slave calculated by inverse kinematics for task modes(right arm) Fig. 16 Sound system for virtual environment
(19)
5. 가상환경내 마스터-슬레이브 조작 시스템 평가
앞 절들에서 구현된 마스터-슬레이브 시스템이 가 상 환경 내에서 잘 작동됨을 확인하기 위하여, 두 가 지 관점에서 평가를 실시하였다.
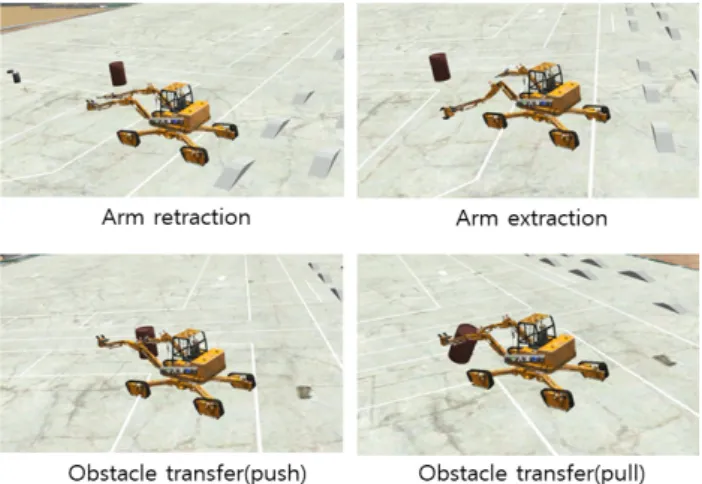
Fig. 17 Task modes of master-slave operation system for evaluation of implemented system
첫 번째는 마스터로 조작되는 슬레이브의 관절 값
을 통해 적용한 매핑 및 역기구학이 적절한지를 평
가하였고, 두 번째는 마스터-슬레이브 조작 시스템을
가상 환경상에서 동작하게 하는 동역학 및 유압 해
Fig. 19 Coordinate of slave for task mode(right arm)
석이 실시간으로 잘 동작되는지를 확인하였다. 상기 의 두 가지를 평가하는 이유는 매핑 및 역기구학이 적절하지 않다면 운전자 조작의 연속성이 떨어질 것 이고, 물리 모델의 실시간성이 떨어진다면 가상 환경 내에서 구동되는 슬레이브가 운전자의 조작에 제대 로 반응하지 못할 것이기 때문이다.
이러한 평가를 위해, Fig. 17과 같이 작업기의 오므 리기, 펼치기, 장애물 밀기, 당기기 동작을 실시하였 고, 매핑 및 역기구학의 적절성을 확인하기 위해서는 슬레이브의 각 관절 값 및 각 관절 값이 지시하는 좌 표 값의 연속성 유무와 수정된 마스터의 좌표와 슬 레이브의 좌표 간의 거리 오차를 확인하였다. 물리 모델의 실시간성을 확인하기 위해서는 동작 중 가장 많은 부하가 작용하는 1~4번 실린더의 압력 값 발산 유무와 시뮬레이션 한 스텝(Step)당 소요되는 연산 시간(Task Execution Time)을 확인하였다. Fig. 18과 Fig. 19는 각 동작에 대한 슬레이브의 관절 값 및 슬 레이브 관절 값이 가리키는 좌표들을 나타내며, 불연 속적인 부분들이 관찰되지 않은 것으로 확인된다. 또 한, 제안된 매핑으로 수정된 마스터의 좌표와 슬레이 브의 좌표 간의 거리 오차에서도 Fig. 20과 같이 최 댓값이 0.16mm로 목표 허용오차 2.2mm를 충족하는 것이 확인되며, 이러한 것들을 통해 적용된 매핑 및 역기구학이 적절히 이루어졌음을 확인할 수 있다.
Fig. 20 Distance error between modified coordinate of master and calculated coordinate of slave for task mode(right arm)
Fig. 21~24의 각 실린더 압력 특성에서도, 시뮬레
이션상의 펌프 설정압력이 250bar임을 감안했을 때,
각 실린더의 Port A와 Port B의 압력이 250bar보다
과도하게 높아져서 해석이 발산하는 부분이 없음이
확인된다. Fig. 25에서도 Task execution time이
0.4386ms 이하로 나타났으며, 설정한 시간 간격
2.5ms을 넘지 않는 것으로 보았을 때, 시뮬레이션의
실시간성이 지켜지고 있음이 확인된다.
Fig. 21 Pressure of cylinder 1(right arm)
Fig. 22 Pressure of cylinder 2(right arm)
Fig. 23 Pressure of cylinder 3(right arm)
매핑 및 역기구학의 적절성 및 시뮬레이션의 실시 간성에 이외에도 Fig. 26과 같이 슬레이브의 오른쪽 과 왼쪽 팔의 작업 영역을 확인하였으며, 해당 작업 이 오른쪽과 왼쪽 팔의 공통 작업 영역 내에 이루어 짐을 알 수 있다. 이러한 공통 작업 영역(Common workspace) 내에서는 슬레이브의 오른쪽과 왼쪽 팔의
Fig. 24 Pressure of cylinder 4(right arm)
Fig. 25 Task execution time of real-time simulation (right arm)
x(m)
y(m) z(m)
Common workspace