大 韓 土 木 學 會 論 文 集 第29卷 第4D 號·2009年 7月 pp. 499~507
情 報 技 術
유비쿼터스 도로 중앙분리대 시스템 개발
Development of Ubiquitous Median Barrier System in the Highway
조병완*·박정훈***·윤광원***·김 헌****
Jo, Byung-Wan
·
Park, Jung-Hoon·
Yoon, Kwang-won·
Kim, Heoun···
Abstract
A median barrier in the road is to separate driver and passenger the traffic flow in the 4-line over highway. In order to keep thee safety of and minimize the traffic jam in the traffic accidents, the ubiquitous intelligent median barrier system is proposed in this paper. This system is required to develop the sensor node fields in the median barrier, which detects the traffic accident using vibration sensors and wireless communication network. Free space test to sensing & receiving radio frequency, veri- fication of middleware to report and countermeasure the accident intelligently to police and hospital are carried out.
Keywords :ubiquitous, sensor, wireless, remote control, middleware
···
요 지
도로중앙분리대는 4차선이상의 도로에서 차도방향별로 분리하는 도로안전구조물로서, 도로교통사고와 같은 긴급 상황시 운 전자 및 승객의 생명과 안전을 보호 하고, 교통장애를 최소화하기 위하여, 첨단 유비쿼터스 IT기술을 융합한 유비쿼터스 도 로 중앙분리대 시스템을 제안하였다. 본 논문에서는 지능형 도로중앙분리대의 교통사고 상황인지를 위한 센서노드필드를 구 성하고, 자유공간 송, 수신테스트 및 실외시험을 통해 미들웨어를 개발한 결과, 무선통신을 통해 언제, 어디서나 교통사고 발생을 24시간 실시간 인지하여 병원 및 경찰 같은 유관기관 및 담당자에게 신속하게 통보, 대처하는 것을 검증하였다.
핵심용어
:유비쿼터스, 감지기, 무선, 원격 제어, 미들웨어
···
1. 서 론
도로중앙분리대는 4차선 이상의 도로에서, 차도(車道) 방향 별로 분리하는 시설로 폭은 0.5~3m가 보통이나, 주행하는 차가 반대차로에 들어가지 않도록 차도면 보다 높게 만들지 만, 그래도 충분하지 않을 때는 다시 분리대속에 가드레일 등을 설치하여 대향차(對向車)의 전조등 빛이 운전자에게 해 가 되지 않도록 설치하는 도로구조물이다.
그러나, 급격한 경제발전으로 교통수요가 연평균 10%이상 증가하면서, 이에 따른 치명적인 교통사고도 증가하여, 2006 년 경찰집계 도로 교통사고는 총 213,745건으로 이중 사망 자는 6327명, 부상자 340,229명으로 공식 집계되어 이에 대 한 대책이 시급한 실정이다(사이버 경찰청, 2007).
특히, 산악지역이나, 기상악화로 인한 시계 미확보 지역, 교통량이 적은 새벽 시간, 지방 국도 등에 발생하는 교통사 고의 경우에는 늦장 신고, 지연 출동으로 인명 피해 및 물 적 피해를 초래하여 사회적으로 큰 손실을 가져오고 있다.
이에 본 연구에서는 이러한 기존 교통사고신고의 문제점을
보완, 해결하기 위하여 유비쿼터스 환경의 RFID(Radio
Frequency Identification)/USN(Ubiquitous Sensor Network)기반 상황 인식, 제어 기술을 이용하여 실시간으로 시설물 상황을 인지함으로서 위험 상황 시 구조물 스스로가 자기 상황을 판단, 조치를 통해 긴급 상황으로부터 운전자 및 승 객의 생명과 안전을 보호하며, 교통장애를 최소화 하는 첨단
IT기술 기반의 지능형 도로 중앙분리대를 제안하기 위하여 유비쿼터스 무선 센서네트워크 시스템 구축방법과 미들웨어 자유공간 송수신 거리 테스트 및 실외실험 등을 실시하였다.
2. 유비쿼터스와 도로중앙분리대
2.1 Ubiquitous
“Ubiquitous”
란 (신은)언제 어디에나 널리 존재 한다.라는
라틴어에서 유래한 말로 편재: 어디에나 있다(Mark-Weiser,
1998)
라는 뜻으로 활용되고 있다. 이러한 개념을 발전시켜
IT
분야의 차세대 패러다임으로 떠오른 기술이 바로
Ubiquitous Computing인 것이다. Ubiquitous란 말은 미국
*정회원·한양대학교토목공학과정교수 (E-mail : [email protected])
**정회원·교신저자·한양대학교 토목공학과 박사과정 (E-mail : [email protected])
***한양대학교토목공학과박사과정 (E-mail : [email protected])
****한양대학교 토목공학과 박사과정 (E-mail : [email protected])
Xerox
의 팰로 알토 연구소(PARC; Palo Alto Research
Center)
에서 연구 소장으로 근무한 Mark Weiser라는 사람에
의해 1991년 9월 Scientfic American지에 발표한 “The
Computer of the 21st Century”
라는 논문에서 그 개념이
제일 먼저 시작되었다.
마크와이저는 이 논문에서 유비쿼터스라는 개념을 보이지 않는 비가시성(Invisibility), 즉 우리가 의식하지 않고 언제 어디서나 일상 속에서 자유롭게 네트워크를 통한 컴퓨터를 활용할 수 있다는 것으로 정의 한다.
이러한 유비쿼터스는 일상생활에 존재하는 물리적 대상 즉 시설물에 네트워크 기능, 센서 기능 및 태그 기능을 포함한 초소형 칩 형태의 컴퓨터를 이식하고 각각의 물리적대상이 하나의 무선 네트워크로 연결되어 해당 서비스를 받고자 하 는 사용자는 언제 어디서나 손쉽게 컴퓨팅이 가능하도록 하 는 새로운 IT개념으로, 이를 도로중앙분리대에 적용하면, 교 통사고를 신속히 감지하여, 무선네트워크를 통해 경찰서 및
119등이 자동으로 긴급 출동하여 인명피해를 최소화하는 유 비쿼터스 도로 중앙 분리대가 될 것이다.
2.2 USN(Ubiquitous Sensor Network)
USN
은 여러 개의 센서 네트워크 Fields가 Gateway를 통 해 외부 네트워크에 연결되는 구조를 갖는다. 도로중앙분리대 에 설치된 센서 노드들은 가까운 수신기로 데이터를 전송하 고 수신기에서는 이러한 데이터를 관리자에게 전달하게 된다.
전송되는 데이터는 위성통신, 유무선 인터넷 등을 통해 전 송될 수 있으며, 이런 Access Network는 기존의 인프라를 이용한다. 전체적인 USN 시스템 구성도는 그림 1과 같다.
Access Network
는 IPv6기반의 BcN으로 인터넷 통합망을
가정하며 이는 곧 모든 센서 노드에 IPv6가 적용될 것을 뜻한다. 또한 센서 네트워크의 애플리케이션을 위해 미들웨 어로서 서비스 플랫폼이 제공되어 사용자는 이를 통해 차세 대 네트워크인 지능형 센서 네트워크를 자유롭게 이용하게 된다.
USN
이 완성되기 위해 우선 주목해야 하는 부분은 센서 네트워크 field 부분이다. 수신기를 거쳐 Access Network
이상의 분야는 USN의 통합적인 발전을 위한 기술로써 정책 적으로 발전되며, 센서 네트워크 field분야는 연구진의 기술 개발로 발전된다. 센서 네트워크는 네트워크를 구성하는 일 정 지역에 소형의 노드들이 수 백 개에서 수천 개까지 설치 하여 통신하는 구조를 갖는다.
2.3
중앙분리대 연구동향
국내 현재의 중앙분리대의 우리나라의도로의 구조·시설 기준에 관한 규칙은 중앙분리대의 설치여부를 결정함에 있 어, 자동차 전용도로나 설계속도가 높은 도로 등에 있어서는 의무적으로 설치하도록 규정하고, 기타 도로에 있어서는 경 제성, 용지 문제, 교통상황, 연도상황 등으로 미루어 보아 안전하고 원활한 교통을 확보하기 위하여 필요하다고 판단 될 때에 중앙분리대를 설치하도록 규정(강원의, 1998)하고 있다. 이러한 기준은 대부분의 기준 적용에 있어서 최소치를 적용하는 관행에 의하여 고속의 간선도로인 4차로 이상의 국도에서도 중앙분리대 시설을 제대로 설치한 구간이 보기 힘들고, 대부분 두 줄의 노란색 노면 표시로 40cm 내지
55cm
폭의 중앙분리대를 설치한다. 우리나라 중앙분리대는
약 95%가 콘크리트 중앙분리대이고, 약 5%가 철재 중앙분 리대를 사용하고 있으나, 후자는 비상시 차량 U-turn을 위한 구간에 기존 도로측면 가드레일을 설치한 것으로 실질적인 철재 중앙분리대의 사용은 전무하다고 할 수 있다. 보다 구 체적인 중앙분리대 설치 위치 및 형식에 대한 기준이 만들 어져야 하며, 안전성이 향상된 규격과 재료, 첨단 IT기술을 이용한 지능형 도로 개발에 대한 연구가 이루어져야 할 것 이다.
3. 유비쿼터스 도로 중앙분리대 시스템
도로 내 교통사고를 인지하는 RF Chip cc2240기반의 센 서 노드개발과 네트워크를 연결하는 USB형식의 싱크 노드 로 하드웨어를 구성하였으며, UC Berkeley에서 개발된
Tiny OS
운영체제를 사용하여 지능형 도로중앙분리대 시스
템을 구축하였다.
그림
1. USN시스템 구성도
(표철식
, 2003)3.1 WSN(Wireless Sensor Network) System Flow
유비쿼터스 도로 중앙분리대 시스템 개발에 사용된 무선센 서네트워크의 시스템 구성은 그림 3과 같으며, 크게 소프트 웨어와 하드웨어로 나뉘어져 있다. 소프트웨어는 운영체제,
미들웨어, 어플리케이션을 포함하고 있으며, 하드웨어에는 센 서노드(Mote), 싱크노드(Sink Node)가 있다. 본 시스템 개 발 실험에서 사용된 하드웨어와 소프트웨어 기술은 표 1과 같다.
그림
2.콘크리트 중앙분리대와 철재 중앙분리대
그림
3. WSN(Wireless Sensor Network) System Flow표
1.무선 센서 네트워크 시스템 내부 기술
분 류 기 능
하드웨어 기술
센서노드
(Mote)센서 보드
(Sensor Board) •
진동 센서 부착 가능
센서 모듈
(Sensor Module)•
마이크로프로세서-연산기능
•
초소형 MEMS-인지기능 (Microelecromechanical Systems)
-
입체적인 미세구조와 회로, 센서와 actuator를 실리콘 기판 위에 집적화 시킨 것
-초소형이면서 복잡하고 고도의 동작을 수행
•
저 전력 트랜시버-전송가능
싱크노드(Sink node)
•센서 모듈로부터 데이터 수집-데이터 수집기능
•
외부 네트워크와 연결- 네트워크 연결기능
소프트웨어 기술
운영 체제
(Operating System)•
이벤트 처리 기법을 이용한 센서네트워크
•
운영체제
-컴포넌트 기반
-저 전력 모드지원
- nesC
를 이용한 센서 응용프로그램 개발 nesC는 Tiny OS의 이벤트 기반의 동시성 을 지원하고, 공유된 데이터의 동시 액세스가 가능
-
멀티 홉 라우팅 기능 지원
(middleware)
미들웨어
•
속성 기반의 주소 지정
- ID를 이용한 주소 지정
-응용에 따른 새로운 질의 형태
•
협업적 네트워크 동작 제어
-데이터 통합
-
주소해석/위치 인식
-
노드 이동성에 따른 적응적 라우팅 기법
•
통신량 감축
-
데이터 통합을 통한 트래픽 감소
-이벤트 기반의 통신
3.2 Hardware System Flow
본 시스템 개발의 하드웨어는 크게는 센서노드와 싱크노드 되어있다. 즉, 송신하는 센서노드와 수신하는 싱크노드로 분 류되어 있고, 센서노드는 센서보드와 센서모듈로 구성 되어 있다.
결과적으로 그림 4와 같이 센서노드, 센서모듈, 싱크노드 로 구성되어 있다. 하드웨어 시스템은 센서 보드와 센서 모 듈이 도로 내 교통사고 상황을 인식하여 자료를 수집, 연산 하고 싱크노드가 네트워크로 전달하는 방식으로 이루어져 있다.
3.2.1 Sensor Node(Mote)
센서 노드는 그림 5와 같이 센서를 부착할 수 있는 센서 보드와 센서모듈로 구성되어 있으며, 이는 센서보드 위의 센서가 도로 중앙분리대에서 발생하는 상황을 인식하고, 이 를 센서모듈이 연산, 수집 하여, 싱크 노드로 전송한다. 그 후 싱크 노드가 네트워크로 전송하게 된다. 그림 5는 센서 노드의 회로 블록 다이어그램이다. JTAG는 회로에 프로그 램을 로딩 할 수 있는 포트로서 JTAG(Joint Test Action
Group)
를 이용해서 일반 PC에서 코딩한 프로그램을 회로에
이식할 수 있다. USB PORT 센서 운영시 USB를 통해서 제어 및 통신을 한다. Oscillator는 정밀한 시계로서
Oscillator
가 발생시키는 클럭에 의해서 모든 회로가 동작을
하게 된다.
최소 1초에 54M, 54000000번 클럭을 발생시킨다. 발생한 클럭 값을 기준으로 모든 디지털 회로가 작동하게 되며, 1 클럭이 최소의 한 단위동작을 구성한다. ATMEL 128L은
CPU이며, JATAG로 이식한 프로그램이 Flash에 저장되고,
이 프로그램을 ATMEL에서 실행된다. Timer는 몇 초마다 이벤트를 발생하기 위해서 Atmel에 내장되어 있는 회로 모 듈이다. RAM은 동작 중에 일시적으로 데이터를 넣기 위한 저장소이다. CC2240은 TI사에서 만든 USN(2.4GHz)용 통 신 칩으로 안테나를 통해 발생한 센싱 값을 메인 서버로 전 송한다.
3.2.2 Sensor Module
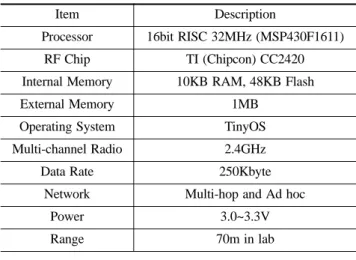
본 시스템 개발에 사용된 센서모듈의 사양은 표 2와 같다.
대표적인 구성은 Microprocessor, RF chip, Chip Antenna 등으로 이루어져 있으며, Processor는 16bit RISC 32MHz 를 사용하며, RF Chip은 CC2420, Operating System은
Tiny OS
를 사용한다.
유비쿼터스 도로 중앙분리대 시스템의 자세한 센서모듈의 시스템 기능은 아래와 같다.
그림
4. Sensor node configurations그림
5. Construction of a Sensor Node표
2. Sensor module SpecificationsItem Description
Processor 16bit RISC 32MHz (MSP430F1611)
RF Chip TI (Chipcon) CC2420
Internal Memory 10KB RAM, 48KB Flash
External Memory 1MB
Operating System TinyOS
Multi-channel Radio 2.4GHz
Data Rate 250Kbyte
Network Multi-hop and Ad hoc
Power 3.0~3.3V
Range 70m in lab
3.2.2.1 Microprocessor
Sensor node
의 Microprocessor는 연산을 미리 확립된 순 서에 의해 체계적으로 실행할 뿐만 아니라 컴퓨터의 각 장 치에 제어 신호를 제공하는 제어장치를 1개의 작은 실리콘 칩에 집적시킨 초대규모 집적회로로 이루어진 처리장치이다.
내부는 산술 논리 연산기, 레지스터, 프로그램 카운터, 명령 디코더, 제어회로 등으로 구성되어 있다.
마이크로프로세서는 주기억장치에 저장되어 있는 명령어를 인출하여 해독하고, 해독된 명령어를 실행하며 실행 결과를 다시 주기억장치에 저장할 수 있는 기능 등을 자동으로 수 행함과 동시에 입출력 장치들과도 데이터 교환을 수행한다.
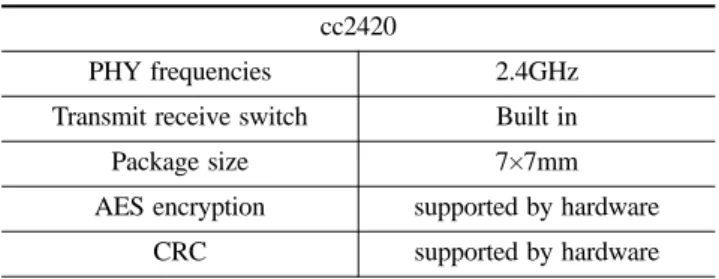
3.2.2.2 RF chip
본 시스템 개발에 사용된 RF chip은 CC2420으로, Zigbee 의 RF 및 MAC 부분이 포함된 Single chip으로 MAC 부 분까지 silicon화 된 것이 특징이다. 또한, 현재 다수의
MCU를 지원하며, ATMEL, T.I, SiliconLabs 등의 MCU와 인터페이스가 가능하다. 2.4GHz의 주파수는 고주파 대역으 로 사용거리가 길고, 읽는 속도가 빠르다는 점이다. 도로 내 교통사고를 감지하고 기록하는 것이 가능하다. CC2420의 기 본 사양은 표 3과 같다.
3.2.2.3 Chip Antenna
본 시스템 개발에서 사용된 센서에 부착된 Chip antenna 의 사양은 표 4와 같다
Chip antenna
는 실제사이즈가 8.0×4.0×1.5mm로 크기가
작아 중앙분리대에 설치가 용이하며, 무게가 가볍다. 광대역 으로써 주파수 분할 다중화 기법을 이용해 하나의 전송매체 에 여러 개의 데이터 채널을 제공하며, 수신. 증폭기 등의 입력에 대한 출력 비율이 1.5dBi로 높다. 전파의 통신에 영 향을 미치는 안테나의 방사패턴은 OMNI-DIRECTIONAL 방식이고, 직선의 분극을 보인다.
3.2.3 Sink Node
싱크 노드는 USB형식으로 센서모듈이 송신한 정보를 수
신 받아 네트워크로 연결시켜준다. 본 시스템에 사용된 싱크 노드의 사양은 표 5와 같다.
3.3. Software 3.3.1 Middleware
유비쿼터스 도로 중앙분리대 middleware 운영체제는 Tiny
OS(UC Berkeley)를 사용하였다. Tiny OS는 wireless em-
bedded sensor networks
를 위해 고안된 open-source
operating system
이다.
중앙분리대 미들웨어 시스템은 Sensor Networks에서 요구 되는 제한된 메모리에 맞게 code 크기를 최소화하여 구현되 었고, 빠르게 신기술을 도입할 수 있는 component 기반 구 조로 되어 있다는 것과 event-driven execution model 이라 는 것이 특징이다.
프로그램 개발환경은 Cygwin은 Windows상에서 USN
middleware
를 개발할 수 있는 Linux 환경을 구현하였으며
TinyOS
와 Cygwin을 이용하여 도로에서 발생하는 상황으로
부터 신속히 대처할 수 있는 평가알고리즘 작성하였으며, 평 가 알고리즘을 진동센서모듈에 펌웨어 형식으로 코딩 하였다.
미들웨어는 애플리케이션들을 연결해 이들이 서로 데이터 를 교환할 수 있게 해 주는 소프트웨어로써 유비쿼터스 도 로 중앙분리대의 SFnet과 Monitoring System, Data base
(DB)가 있다. SFnet과 Monitoring System, Data base(DB) 의 자세한 구성 및 사용방법, 용도는 아래와 같다.
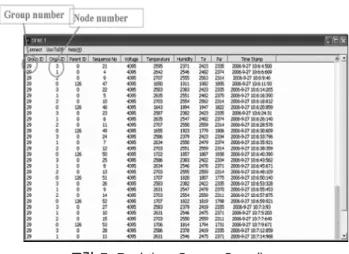
3.3.2 SFnet
SFnet
은 무선센서 통신네트워크 구축 시 센서가 중앙분리
대에서 설치되 있는 센서로부터 읽은 데이터 센싱 값을 모 듈로 전달해 모듈에서 값을 분석하고 그 값을 데이터베이스 로 저장할 수 있도록 연결 시켜준다. 프로그램 시작 시 미 리 설정된 데이터베이스 이름과 연결 포트 number를 입력 하여 프로그램을 실행 시킨다. 그 후 프로그램 스스로 데이 터 값을 지정된 데이터베이스로 자동 저장 한다. 그림 7은
SFnet
실행화면이다. 그림에서 보는 바와 같이 SFnet에서는
표
3. RF Chip Specifications cc2420PHY frequencies 2.4GHz
Transmit receive switch Built in
Package size 7×7mm
AES encryption supported by hardware
CRC supported by hardware
표
4. RF Chip SpecificationsItem Description
BANDWIDTH 250 MHz (10 %)
GAIN (max.) 1.5 dBi
PHYSICAL SIZE 8.0×4.0×1.5 mm
POLARIZATION LINEAR
RADIATION PATTERN OMNI-DIRECTIONAL
INPUT IMPEDANCE 50
표
5. RF Chip SpecificationsItem Description
Internal Memory USB
Data Rate 560Kbps
그림
6.미들웨어 개발 환경
(Cygwin화면
)그룹 지어진 node들이 데이터 전송의 최적의 경로를 찾아 통신 하고 있는 상태를 node번호를 통해 나타내며, 중앙분리 대 설치된 센서 그룹간의 구별을 위해 번호를 지정해 그룹 을 표시하여 준다. 본 시스템 개발에서는 3개의 센서 node 사용하였으며, 1초당 70개의 데이터를 받는다.
3.3.3 Monitoring System
Monitoring System
은 각 node 간에 실제 통신 상태를
나타낸 그림으로서(그림 8) 도로 중앙 분리대에서 발생하는 진동 값을 모니터링 할 수 있도록 해주며, node를 선택하여 선택된 node의 실시간 데이터 값과 그래프 형상을 볼 수 있다. 또한, Monitoring System을 통하여 데이터베이스에 저장된 데이터 값을 불러들일 수 있으며, 그 값을 저장 할 수 있는 기능을 가지고 있다.
그림 8에서 보는 바와 같이 node번호가 지정되어 송신하 면, node번호가 화면상에 나타나고, Sink node로 직선 연결 하여 송수신상태를 알려준다. 이때, 수신이 중단되면 직선연 결이 사라지고, 중단된 node번호는 화면상에 보이지 않게 되 며 정보를 받을 수 없는 것을 관리자가 화면을 통해서 확인 할 수 있다. 주변 환경과 여건에 따라 Sensor Node수신 상 태가 지연, 중단될 수 있다. 하지만 본 시스템 구성에는
Ad-hoc
네트워크를 사용한 것을 제시하였다. Ad-hoc네트워크
는 노드(node)들에 의해 자율적으로 구성되는 기반 구조가 없는 네트워크 이다. Ad-hoc네트워크는 네트워크의 구성 및 유지를 위해 기지국이나 액세스 포인트와 같은 기반 네트워 크 장치를 필요로 하지 않는다.
본 시스템 개발에 사용된 노드들은 무선 인터페이스를 사 용하여 서로 통신하고, 멀티 홉 라우팅 기능에 의해 무선 인터페이스가 가지는 통신 거리상의 제약을 극복하며, 노드 들의 이동이 자유롭기 때문에 네트워크 토폴로지가 동적으 로 변화되는 것을 확인하였다. 그림 8에서는 node들의 송수 신 연결 상태를 보여주고, 그림 9에서는 송수신되고 있는
node
하나를 선택하였을 때, 도로 중앙분리대 시스템의 실시
간 계측 값과 그래프 형상을 보여주고 있으며, 도로 중앙분 리대에 교통사로 등으로 인한 일정 값 이상의 충격이 가해 질 경우 그래프가 변화는 값을 육안으로 쉽게 확인할 수 있 다. 이 때 충격 값 은 Matlab를 이용한 패턴인식 기법을 사용하여 얻어진 값이다. 패턴인식 기법이란 여러 충격 값 을 반복 실험하여 정확 한 값을 추정하는 방식이다.
3.3.4 Data base (DB)
Data base
는 센서가 읽고 모듈이 전달한 데이터를 저장할
수 있는 저장 장치이다. 본 시스템 개발에서 사용된 DB는 실험 전 이름을 설정 한 후, SFnet 실행 시 DB의 이름을 통하여 경로를 선택 하면 선택된 DB를 통해 자동 저장된다.
그림 10에서 보는 바와 같이 이름을 설정하여 Data base 를 구축하고, 지정된 node 번호 별로 DB에 각각 자동저장 그림
7. Real time Sensor Sampling그림
8. Monitoring System의 실행
그림
9. Monitoring System의 데이터 전송
그림
10. Monitoring System의 데이터 전송
된다. 유비쿼터스 도로 중앙분리대 시스템 프로그램은
Monitoring System
과 연동하여, 저장된 DB명을 통하여, 원
하는 시간대의 계측 값을 불러들여 별도로 다시 저장 할 수 있는 기능을 가지고 있으며, 교통사고 발생 시 충격량 분석 도 가능하리라 판단된다.
4. 자유공간 송수신 거리 TEST
본 실험에서는 먼저 센서의 성능을 실험하고, 실험결과 값 과의 비교를 위하여 그림 12와 같이 자유공간에서 송수신 능력을 실험하였다.
실험 장소는 서울 한양대학교 대운동장에서 하였으며, 날
씨는 맑았고, 실험은 외부환경의 영향을 최소화하기 위하여, 공기 중의 습기가 가장 적은 오후 2시경에 실시하였다. 실 험방법은 출발점에 송신 센서를 고정시키고, 수신센서의 거 리를 점점 멀리하여 전송거리를 측정하였다.
4.1
자유공간 송수신 거리
TEST결과
실험결과 자유공간에서의 송수신은 200m의 운동장 끝까지 다다를 때까지 가능했다. 그 이상은 실험을 할 수 없었으므 로, 이에 본 실험에서는 자유공간에서 200m 이상의 수신을 보인다고 보았다. 이러한 결과는 센서를 구조물에 매입하지 않고, 외부에 노출시켜 사용이 가능함을 보여준다.
통신거리실험결과 120m일 경우 통신품질은 86%, 300m일 경우는 수신품질이 56%로 120m, 300m 모두 수신 품질이
50%이상으로 도로 구조물에 적용하기 양호한 것으로 검토 되었다.
5. USN 기반 시스템 실험과 적용
5.1
실외 실험
중앙분리대 상판에 상향을 향하도록 고정 부착되며 수면과 평행하도록 센서의 방향을 유지 하였다. 한 중앙분리대에 양
(X, Y
축) 방향으로 부착하며 통신의 패킷 손실률을 최소화
한 RF모듈 간 최대 통신 거리는 30M로 하였다. 중앙분리 대의 길이가 길 경우는 데이터 전송만을 담당하는 USN 통 신 릴레이 노드를 주어진 간격대로 설치함으로써 현장 적용 성이 가능하다.
그림
11. 1node data그림
12.자유공간 송수신
TEST그림
13. 120m에서의 측정 장면 및 결과
그림
14. 120m, 300m에서의 통신품질 결과
본 실험은 1교축 방향 진동을 측정하여 일정 이상의 충격 이 가해지면 부착된 센서가 실시간 감지하며 자동으로 D/B 에 저장, 관리자와 담당자에게 자동차 사고로 인한 긴급 상 황 발생 시 실시간으로 통보 하도록 알고리즘을 작성하였다.
실험에 사용된 센서는 X축, Y축으로 부착시켜(그림 15)실 험을 실시하였다.
본 실험의 무선 가속도 센서의 경우는 초당 70개의 데이 터가 저장 된다. 중앙분리대는 고정되어 있기 때문에 평상시
Sampling
값은 거의 일정하게 나타났다.
그림 16은 node의 Sampling 값을 실시간 보여주고 있으 며, 그림 17은 일정충격 값 이상 중앙분리대에 설정해 놓은 충격 값 이상의 값이 감지되어 Node 위치와 형태를 관리자 에게 알리고 메인 컴퓨터 화면에 자동으로 창이 뜨도록 시 스템 개발에 성공하였다.
5.2
도로 중앙분리대 적용 서비스
개발된 유비쿼터스 도로 중앙분리대 시스템의 경우 급커브
지역, 기상 악화로 인한 안전 시계 미확보 지역 및 특정 사 고다발지역 등 여러 가지 목적에 따라 자유로운 운영 방식 을 설정, 접목 할 수 있다. 그림 18은 유비쿼터스 도로 중 앙분리대 전체 시스템 구성으로 교통사고 발생 시 도로 이 용자들에게 일어나는 상황을 CDMA통신망을 통해 실시간 정보제공, 최적의 교통 소통을 제공하게 된다. 또한, USN
Middleware를 이용하여, u-Smart Median Strip System의 특화된 Service를 제공할 것이다. USN Middleware의
Context Rule Engine을 이용하여 Structure System에 적합 한 Context-Aware Service를 생성 및 Structure System 운 영에 적용한다. 유비쿼터스 도로 중앙분리대 시스템 운영에
Context-Aware Service
가 적용이 됨으로써, 기존에 관리자에
의해서 수동적으로 운영이 되었던 Dummy Structure
System
을 벗어나, 상황인식 기능을 지닌 Smart Road
System
으로 변화하게 될 것이다. RFID Tag Reader가 장착
된 Embedded System을 이용하여, 관리자에게 RFID Tag 기반의 Location Based Service를 제공함으로써 Structure
System
중심의 System 운영에서 벗어나 관리자가 직접
Smart Median Strip System
과 상호작용 할 수 있게 한다.
6. 결 론
도로상에서 빈번히 발생하는 교통사고 인지 및 신고를 신속히 하기 위해서 도로중앙분리대에 무선 센서 네트워크 개념을 정립하고, 센서 노드 개발과 개발된 노드를 바탕으 로 센서 필드를 구성, 자유공간 송, 수신 테스트 및 실외 실험을 통해 미들웨어를 개발한 결과 다음과 같은 결론을 얻었다.
첫째, 도로 내 교통사고를 인지하는 RF Chip CC2240의 센서 노드와 네트워크를 연결하는 USB형식의 싱크 노드로 하드웨어를 구성하였으며, 운영체제로 UC Berkeley에서 개 발된 Tiny OS운영체제를 사용하여 유비쿼터스 도로중앙분리 대 시스템을 구축하고, 현장에서 성능적용실험을 한 결과, 무 선통신을 통해 언제, 어디서나 교통사고 발생을 24시간 실시 간 인지 하여 병원 및 경찰 같은 유관기관 및 담당자에게 신속하게 통보, 대처하는 것을 검증하였다.
둘째, 교통사고를 인지하는 가속도 센서의 센싱 값은 실외 그림
15.현장에 설치된 센서
(X, Y축
)(가드레일 지주
,일반용
2단
,φ
139.8×4.5×2,550)그림
16. Node Sampling데이터 값
그림
17.사고발생 지역 및
Case형태
자유 송신 거리 Test 실험을 통하여 분석한 결과, 200m 이 상의 데이터 수신율 및 정밀도에 있어서 높은 신뢰도를 보 였으며, 다수의 센서 필드를 구성함에 따라, 일부 발생할 수 있는 센서 노드의 기계적 결함 등으로 인한 네트워크의 불 확실성은, Ad-hoc 네트워크를 활용하여 멀티 홉 라우팅 기 능에 의해 무선 센서 네트워크 토플로지가 동적으로 작용하 는 것을 검증하였다.
셋째, 실외실험 결과 Zigbee의 RF통신을 이용하여 Node 추출 값은 초당 70개의 데이터가 저장되는 것을 확인하였으 며, 센서노드의 한계치 이상의 충격량 값이 발생 시 메인 컴퓨터에 진동 그래프와, 교통사고 발생을 알리는 시스템을 구현하는데 성공하였다.
따라서 향후 과제로는 도로 교통 상황 정보 모니터링 인 터페이스 및 기능 강화와 센서 노드의 수명 연장, 교통사고 충격량을 정확히 계산하여 유형별 사고 감지를 통해 지능형 도로 개발의 초석이 될 것으로 믿으며, 끝으로 본 연구가 기타 사회 기반 및 구조물의 유비쿼터스 지능화에 도움이 될 수 있기를 기대 한다.
참고문헌
강원의 등(1998) 도로안전시설 설치 및 관리 지침
:중앙분리대 충격흡수시설편. 연구보고서, 국토해양부.
김영락(2007) TinyOS기반의 USN 응용개발 분석. 한국멀티미디 어학회집. 한국멀티미디어학회, 제11권 제3호, pp. 22-33.
김영만(2004) 센서네트워크 미들웨어 구조 및 연구 현황. 한국정 보과학회집, 학국정보과학회, 제22권 제12호, pp. 13-20.
대한토목학회(2000) 도로의 구조
/시설 기준에 관한 규칙
:중앙분 리대. 사단법인 대한토목학회.
박승창(2005) 유비쿼터스 센서 네트워크 기술. jinhan M&B.
이현창(2005) 유비쿼터스 컴퓨팅을 위한 센서
&인터페이스
.성 최길대(1999) 도로안전시설 안당. 설치 및 관리 지침
:중앙분리대. 연
구보고서, 한국건설기술연구원.
Hill, J., Szewczyk, P., Woo, A., Hollar, S., and Pister, D. C. K.
(2000) System Architecture Directions for Networked Sensor.
Shen, C., Sriathapornphat, C., and Jaikdo, C. (2001) Sensor infor- mation networking architecture and applic ation, IEEE Per- sonal Communications, Vol. 8, No. 4, pp. 52~59.
Levis, P. and Culler, D. (2002) Mate : A virtual machine for tiny networked sensor, Proc. of ACM Conf. Architectual suppoet for Programming Languages and Operation System, San Joes, CA.
(