스마트무인기에 적용한 유동제어 장치
정진덕*, 홍단비**
Application of Flow Control Devices for Smart Unmanned Aerial Vehicle (SUAV)
Jindeog Chung *, Danbi Hong**
Abstract
To improve the aerodynamic efficiency of Smart Unmanned Aerial Vehicle (SUAV), vortex generators and flow fence are applied on the surface and the tip of wing. The initially applied vortex generator increased maximum lift coefficient and delayed the stall angle while it produced excessive increase in drag coefficient. It turns out reduction of the airplane's the lift/drag ratio. The new vortex generators with L-shape and two different height, 3mm and 5mm, were used to TR-S4 configuration to maintain the desired level of maximum lift coefficient and drag coefficient. Flow fence was also applied at the end of both wing tip to reduce the interaction between nacelle and wing when nacelle tilting angles are large enough and produce flow separation. To examine the effect of flow fence, flow visualization and force and moment measurements were done. The variation of the aerodynamic characteristics of SUAV after applying flow control devices are summarized.
초 록
스마트 무인기의 공력특성을 향상시키기 위하여 주익에는 와류생성기(vortex generator), 주익의 끝단에는 유동펜스(flow fence)를 적용하였다. 와류생성기는 SUAV의 최대양력계수 와 실속각을 지연시키는 효과가 있었지만 높은 항력증가를 초래하여, 결국에는 양항비가 줄어들었다. 이를 개선하기 위하여 L-형태와 높이가 3mm와 5mm인 와류생성기를 적용하 였다. 유동펜스는 나셀 틸팅각이 증가함에 따라 나셀에서 발생하는 박리에 의하여 주익성 능이 감소하는 현상을 방지하기 위하여 사용하였다. 두 가지 유동제어 장치를 사용함에 따 라 스마트 무인기의 공력특성들이 어떻게 변화하였는지를 정리하였다.
키워드 : 와류생성기(vortex generator), 유동펜스(flow fence), 양항비(lift-to-drag ratio), 유동가시화 (flow visualization), 안정성(stability)
접수일(2008년12월15일), 수정일(1차 : 2009년 6월 5일, 2차 : 2009년 6월 17일, 게재 확정일 : 2009년 7월 1일)
* 항공체계실/[email protected] ** 항공체계실/[email protected]
1. 서 론
40% 축소된 스마트 무인기 모델을 활용한 풍동 시험에서는 유동가시화와 외장형 풍동저울을 활용 한 6-분력 시험을 수행하여 주익 표면의 유동장 형태와 공력계수를 측정하였다[1,2,3]. 측정결과 양 력계수는 예상 받음각에서 최대양력계수를 확보할 수 없다는 결론에 도달하여, 에어포일을 포함한 주익 형상보다는 와류생성기[4,5]를 사용하여 양력 특성을 개선하기로 하였다. 초기에 사용한 와류생 성기의 높이는 5mm와 10mm 이었는데, 그림 1은 높이 5mm인 와류생성기를 보여준다.
이 와류생성기를 사용하여서 실속각도 근처에 서 최대양력계수는 12% 증가하였으나[1], 반면에 항력계수도 증가하여 결과적으로는 항공기 전체 의 양항비는 와류생성기를 사용하지 않은 경우와 동일한 결과를 얻었다. 이를 개선하기 위하여 높 이와 형상이 다른 와류생성기를 초기와 동일한 In-flow각도와 위치에 부착하여 새로운 와류생성 기의 효과를 검증하는 시험을 수행하였다.
TR-S2 형상에서는 나셀 안쪽에 주익을 확장한 형태의 페어링(fairing)을 부착하였는데, 형상이 TR-S4로 변경하는 과정에서 나셀 내부에 설치되 어야 하는 작동기때문에 나셀 형상의 곡률구배가 그림 2처럼 변하게 되었다.
그림 1. TR-S2에 적용한 와류생성기
그림 2에서 나셀을 따라 에어포일 형태를 갖 는 확장면이 붙어있는 형상이 TR-S2에 사용한 나셀이고, 나셀에 착륙장치가 부착된 그림이 TR-S4에 사용한 나셀이다.
그림 2. 나셀형상 변경
TR-S4 형상에서 새로운 나셀 형상을 사용함에 따라 나셀 틸팅각이 증가할수록, 나셀에서 떨어 져 나오는 박리가 주익으로 넘어오고 결과적으로 는 주익에서 생성할 양력을 줄이는 현상이 발생 하였다. 그림 3은 풍동시험으로 유동펜스가 부착 하지 않은 상태에서 유동가시화 시험한 결과를 보여준다.
그림 3. 40%-축소형 모델에 유동가시화
그림 3은 나셀 틸팅각을 60도로 바꾼 상태에서 모델의 받음각이 8도를 유지한 상태의 유동가시화 결과인데, 나셀 자체의 표면을 따라 박리가 여러 곳에서 발생하였던 흔적을 볼 수 있다. 주익과 나 셀이 만나는 지점은 와류생성기를 사용하여도 나 셀 박리에 의해 유동의 방향이 Inboard쪽으로 이 동하고, 주익 유동장에 영향을 주어 상당히 많은 영역에서 박리가 발생하였음을 보여준다.
본 논문은 와류생성기에 의한 공력성능의 변화 형태를 분석하고, 나셀 틸팅각이 큰 조건에서 안 정성과 양력을 증진시키기 위해 적용한 유동펜스 에 의한 공력특성의 변화를 소개하고자 한다.
2. Flow Control Device 장착
2.1 와류생성기 장착 필요성
와류생성기를 초기에 사용한 목적은 스마트 무인기가 semi-slotted Flaperon을 10도로 변경한 loitering 과정에서 운항할 때 가능한 높은 양력 을 생성하도록 하기 위함이었다. 초기에는 높이 10mm인 와류생성기를 사용하여 inflow에 대한 와류생성기 설치각과 주익 chord 방향의 부착 위치를 변경해 가면서 유동가시화 시험으로 확인 하였다.
시험 결과 inflow에 대해서 20도를 유지하는 것이 가장 이상적인 조합을 생성하여 주익 chord의 30%에 위치한 Flaperon까지 박리가 발 생하지 않음을 확인하였다.
초기에 사용된 와류생성기는 “T" 형태를 이루 고 있었는데, 유입되는 유동과 와류생성기가 만 나는 지점은 50도 정도의 각도를 갖도록 가공을 하였다. 가공된 면이 부드러운 형상을 갖도록 사 포를 이용하여 마무리를 하였다.
그림 4. 와류생성기 장착 방법
와류생성기의 부착위치는 그림 4와 같이 주익 의 앞전으로부터 15% 후방에 설치하였으며, 와 류생성기의 끝단이 15% chord와 일치하도록 접 착제를 사용하여 부착하였다. 설치 과정에서는 정확한 Inflow 각도를 유지하기 위하여 금속 template를 기준선에 고정시키고 와류생성기의 설치 위치를 표시한 이후에 부착하였다.
와류생성기의 설치 간격은 15% 중심선에서 동 일한 inflow 각을 갖는 와류생성기들이 40mm 간격을 유지하도록 하였다. 다시 말하면 inflow 각에 대해서 20도 각도를 갖는 와류생성기는 기 준선을 중심으로 20mm씩 떨어져 있다. 와류생성 기를 부착한 결과들은 TR-S2 형상에서 Flaperon 이 10도인 조건에서 높이 10mm인 와류생성기를 부착한 결과와 Clean 형상에서 높이 5mm를 갖 는 와류생성기를 부착한 결과, TR-S4 형상은 Clean 형상에서 높이가 3과 5mm를 갖는 와류생 성기를 사용한 결과를 비교하였다.
-1.0 -0.5 0.0 0.5 1.0 1.5 2.0
-10 -5 0 5 10 15 20
Angle of Attack
Lift Coefficient
S4[New Nacelle] S4[Old Nacelle]
0.00 0.05 0.10 0.15 0.20 0.25 0.30
-10 -5 0 5 10 15 20
Angle of Attack
Drag Coefficient
S4[New Nacelle] S4[Old Nacelle]
그림 5. 나셀 형상에 따른 양력 및 항력계수
2.2 유동펜스 장착
스마트 무인기 형상 변경 과정에서 가장 큰 변화 중에 하나는 주익 끝단에 위치하면서 tilt rotor의 각도를 변경시켜주는 작동기가 들어갈 나셀 형상 변경이다. 새로운 나셀은 기존의 나셀 보다 유동에 노출되는 단면적이 증가하였고, 나
셀 표면의 surface gradient의 변화가 매우 큰 모 양을 가지고 있다. 이러한 형상 변경에 따른 공 력계수를 확인하기 위하여 비교시험을 수행하였 는데, 그 결과가 그림 5에 보여준다. 구체적인 수 치로 제시한 표 1에 따르면 대부분의 받음각 영 역에서 새로운 나셀을 장착한 경우 기존 나셀보 다 양력계수는 더 작고, 항력계수는 더 큰 경향 을 확인할 수 있다. 새로운 나셀에 의한 양력계 수의 감소와 항력계수 증가의 원인을 파악하기 위하여 나셀의 틸팅 각도를 변경해 가면서 유동 가시화 시험을 수행하여 나셀과 주익 부근의 유 동장 형태를 면밀히 관찰하였다.
표 1. 나셀 형상 변경에 따른 양력 및 항력계수
[New Nacelle] [Old Nacelle] [New Nacelle][Old Nacelle]
-8 -0.4242 -0.4289 0.0801 0.0752
-6 -0.2623 -0.2651 0.0701 0.0637
-4 -0.0936 -0.0898 0.0647 0.0588
-2 0.0774 0.0838 0.0638 0.0577
0 0.2462 0.2597 0.0678 0.0620
2 0.4154 0.4365 0.0762 0.0708
4 0.5880 0.6154 0.0900 0.0842
6 0.7577 0.7946 0.1082 0.1019
8 0.9247 0.9699 0.1312 0.1243
10 1.0910 1.1459 0.1582 0.1513
12 1.2626 1.3229 0.1894 0.1811
14 1.4362 1.4999 0.2231 0.2135
15 1.5065 1.5715 0.2395 0.2297
16 1.5305 1.5996 0.2619 0.2505
Lift Coefficient Drag Coefficient
그림 6. 나셀 틸팅각 변화와 유동가시화 결과
나셀 틸팅각 변화에 의한 유동장 변화를 확인 하기 위하여 스마트 무인기의 Trim 조건으로 결 정된 조종면 변화에 대한 유동가시화 시험을 수 행하였다. 나셀 틸팅은 모두 10도 간격으로 바꾸 면서 90도까지 유동가시화를 하였고, Flaperon 변위각은 10도와 30도를 중점적으로 수행하였다.
나셀 틸팅각이 50도 부근까지는 나셀에서 박 리되는 유동이 주익의 끝단에 영향을 크게 주지 않지만[그림 6], 틸팅각이 60도부터[그림 7] 90도 까지는 주익 끝단의 양력면에 박리를 초래하는 현상이 발견되었다. 그림 7에서는 받음각을 8도 로 변경시킨 그림인데, 주익 끝단에서 유동 흐름 방향이 주익 inboard쪽으로 들어오는 현상을 확 인할 수 있다.
그림7과 같이 박리가 발생하고, 주익에서의 양 력 생성 능력을 저해하는 요소를 개선하기 위하 여, 다양한 제어 장치를 고려하였지만 주익 outboard에서 발생하는 박리가 root부근으로 전 파되는 것을 방지하기 위하여 고정익 항공기에서 보편적으로 활용하는 유동펜스를 부착하였다. 그 림 8은 주익 끝단에 부착하였던 유동펜스의 형상 을 보여준다. 유동펜스는 주익 앞전에서 Flaperon이 시작되는 지점까지 확장하여 사용하 였다. 유동펜스는 두 조각으로 만들어 졌는데, 상 부는 wing 두께와 도일한 높이를 갖도록 하였고, 하부에는 wing 두께의 50%를 사용하였다.
그림 7. 나셀 틸팅각이 60도인 경우 유동가시화
그림 8. Wing tip에 flow fence 장착
3. Flow Control Device 효과
3.1 와류생성기 효과
Flaperon을 10도로 변경시키고 와류생성기를 부착한 경우 양력계수 변화를 그림 9에 보여준 다. 와류생성기를 장착한 경우는 스마트 무인기 형상과는 무관하게 모든 양력계수의 기울기가 증 가하였다. 또한 이 시험을 통하여 확인하고자 하 는 최대양력계수가 와류생성기를 부착함에 따라 모두 증가하는 결과를 얻었다. 또한 Flaperon 설 치각이 10도(그림 9에서 FP=10도)인 경우를 보면 와류생성기를 부착함에 따라 양력계수는 기울기 의 증가뿐만 아니라, 받음각 13도 근처에서 와류 생성기가 없을 때 양력계수가 갑자기 줄어드는 경향도 개선을 하였다.
표 2는 와류생성기를 부착함으로써 얻을 수 있는 양력계수의 증분량을 정리하였다. Flaperon 을 10도로 변경시킨 경우에는 받음각이 증가함에 따라 실속이전까지 계속해서 증가를 하고 있으 며, Clean 형상에서도 양력계수는 실속 이전 받 음각까지 계속해서 증가하고 있음을 보여준다.
와류생성기를 사용하여서 얻어진 최대 양력계 수의 증분량은 5mm를 사용한 경우, TR-S4와 TR-S2의 경우 약 12%의 증가효과를, TR-S4에서 3mm를 사용한 경우에는 14%, 10mm를 사용한 TR-S2 형상에서는 23%의 양력계수 증가를 얻었 다. 일반적으로 높이가 높은 와류생성기를 사용 하는 경우가 좀 더 강력한 와류를 생성하여 주익
의 경계층에 새로운 에너지를 공급하여 주익의 성능을 향상시킬 것으로 예상하였으나, TR-S4의 경우에는 높이를 3mm로 사용하는 경우가 모든 받음각 영역에서 5mm 높이의 와류생성기보다 높은 양력계수를 생성함을 보여준다.
-0.6 -0.4 -0.2 0.0 0.2 0.4 0.6 0.8 1.0 1.2 1.4 1.6 1.8
-10 -5 0 5 10 15 20
Angle of Attack
Lift Coefficient
10mm V.G.(TR-S2, Fp=10°) No V.G.(TR-S2, FP=10°) TR-S4[Clean, No V.G.] TR-S4[Clean, 5mm V.G.]
TR-S4[Clean, 3mm V.G.] TR-S2[Clean, No V.G.]
TR-S2[Clean, 5mm V.G.]
그림 9. 와류생성기 장착에 의한 양력계수 표 2.. 와류생성기 높이에 따른 양력계수 차이
10mm VG- No VG 5mm VG- No VG 5mm VG- No VG 3mm VG- No VG
-6 0.1055 0.0046 0.0071 0.0088
-4 0.1048 0.0156 0.0105 0.0142
-2 0.1155 0.0228 0.0141 0.0180
0 0.1229 0.0293 0.0179 0.0223
2 0.1296 0.0372 0.0244 0.0281
4 0.1388 0.0419 0.0256 0.0293
6 0.1536 0.0434 0.0209 0.0250
8 0.1750 0.0453 0.0182 0.0235
10 0.2146 0.0508 0.0205 0.0251
12 0.2898 0.0587 0.0251 0.0320
14 0.3345 0.1034 0.0547 0.0689
15 0.3427 0.1517 0.1305 0.1703
16 0.3315 0.1661 0.1101 0.1317
TR-S2 TR-S4
Clean Flaperon=10
와류생성기 사용에 따른 양력계수의 증가를 확인하였는데, 다음은 와류생성기에 의한 스마트 무인기의 항력계수가 어떻게 변화하는지 반드시 확인을 해야 한다. 이를 위해서 외장형 풍동저울 로 측정한 결과를 그림 10과 같이 정리하였다.
그림 10에서 3, 5 그리고 10mm 높이의 와류생성 기의 부착한 경우, 항력계수는 모두 증가하는 결 과를 보여준다.
0.0 0.1 0.1 0.2 0.2 0.3 0.3 0.4 0.4
-10 -5 0 Angle of Attack5 10 15 20
Drag Coefficient
10mm V.G.(TR-S2, FP=10°) No V.G.(TR-S2, FP=10°) TR-S4[Clean, No V.G.] TR-S4[Clean, 5mm V.G.]
TR-S4[Clean, 3mm V.G.] TR-S2[Clean, No V.G.]
TR-S2[Clean, 5mm V.G.]
그림 10. 와류생성기 장착에 의한 항력계수 표 3. 와류생성기 높이에 따른 항력계수 차이
항력계수의 변화량은 표 3에 정리하였다. 받음 각이 증가할수록 와류생성기 부착에 의한 항력계 수가 계속해서 증가하는 결과를 보여준다. 특히
Flaperon 설치각이 10도인 경우에는 받음각이 0 도를 넘어서면 와류생성기를 부착하지 않은 경우 보다 항력계수가 15% 이상 증가하는 결과를 보 여준다. 또한 사용한 와류생성기의 높이가 낮을 수록 이로 인한 항력계수의 증가가 적음을 알 수 있다. 3mm 높이의 와류생성기는 대부분 5% 미 만의 항력계수 증가를 5mm 높이의 와류생성기 는 8% 미만의 항력계수 증가를 보여준다.
6.0 6.5 7.0 7.5 8.0 8.5 9.0 9.5 10.0
0.2 0.4 0.6 0.8 1.0 1.2 1.4
Lift Coefficient
Lift/Drag
No V.G.(TR-S2, FP=10°) 10mm V.G.(TR-S2, FP=10°) TR-S4[Clean, No V.G.] TR-S4[Clean, 5mm V.G.]
TR-S4[Clean, 3mm V.G.] TR-S2[Clean, No V.G.]
TR-S2[Clean, 5mm V.G.]
그림 11. 와류생성기에 의한 양항비 변화
그림 11은 와류생성기 적용에 따른 양항비의 변화를 보여준다. 모든 경우가 와류생성기를 사 용함에 따라 양항비가 줄어들고 있다. 따라서 적 합한 와류생성기의 높이는 양력계수의 증가뿐만 아니라, 양항비의 감소를 최소화하는 높이로 결 정해야 한다.
Flaperon이 10도인 경우, 양항비는 0.2% 감소하 는 결과를 생성하였다. Flaperon을 10도로 한 경 우는 최대 양항비를 얻을 수 있는 와류생성기를 부착한 경우가 받음각이 2도이고, 와류생성기가 없는 경우는 4도에서 최대 양항비를 얻는다. 이처 럼 받음각을 낮도록 하면서 운항을 하면, 항력증 가를 줄이면서 최적의 상태로 운항하도록 할 수 있다. 반면에 Clean 형상에서는 10mm 높이의 와 류생성기를 사용하여 양항비가 5.7% 감소하는 결 과를 초래하였다. 위의 결과를 토대로 와류생성기
를 선정할 때도 Clean 형상에서 가능한 최소의 양항비 감소를 생성하는 높이를 결정하는 것이 Flaperon을 10도로 변경시키면서 운항할 loitering 에서 최적의 양항비를 생성한다고 할 수 있다.
이를 위해서 TR-S4 형상에서는 Flaperon 변위 각이 10도가 아닌, Clean 형상을 주로 비교하여 동일한 받음각에서 가장 큰 양력계수를 생성하 고, 양항비의 감소가 최소가 되는 높이를 갖는 와류생성기를 사용하여 관련 공력 Data를 획득 하는 시험에 활용하였다.
TR-S4 형상에서 5mm와 3mm 높이의 와류생 성기 사용한 경우, 이로 인한 양력계수와 양항비 의 감소량은 각각 2.4%, 3.1% 그리고 -4.3%와 -1.5%이다. 이 결과를 보면 높이를 3mm인 와류 생성기를 사용하는 것이 양력계수를 3.1% 증가 시키고, 양항비는 와류생성기가 없는 경우와 비 교하여 1.5%만 감소한다.
longitudinal 안정성에 영향을 미치는 피칭모 멘트계수가 어떠한 변화를 경험하는 지를 분석하 고자 한다. 이는 와류생성기를 부착하여도 lateral /directional 공력계수에는 변화가 없음을 확인하 고 여기서는 취급하지 않는다.
-0.4 -0.3 -0.2 -0.1 0.0 0.1 0.2
-0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
Lift Coefficient
Pitching Moment Coefficient
No V.G.(TR-S2, FP=10°) 10mm V.G.(TR-S2, FP=10°) TR-S4[Clean, No V.G.] TR-S4[Clean, 5mm V.G.]
TR-S4[Clean, 3mm V.G.] TR-S2[Clean, No V.G.]
TR-S2[Clean, 5mm V.G.]
그림 12.. 와류생성기에 의한 피칭모멘트계수
그림 12에서 TR-S2 형상에서 와류생성기를 부 착한 경우들은 동일한 받음각 조건에서 부착하지 않은 경우보다 약간의 nose-down하는 경향을 보 여주고 있다. 반면에 TR-S4 형상에서는 받음각이
10도인 조건까지 동일한 피칭모멘트를 가지고 있 다가, 10도를 넘어서면서 와류생성기에 의해서 스마트 무인기의 nose-up하는 경향을 보여준다.
그러나 전반적으로 실속근처까지의 기울기 및 피 칭모멘트의 경향에는 큰 차이가 없음을 확인할 수 있다. TR-S4 형상은 기동시 안정성을 위하여 활용할 피칭모멘트계수가 적은 결과를 보여주는 데, 스마트 무인기의 최종 형상인 TR-S5 시험에 서는 수평꼬리날개 면적을 37%를 증가시켜 피칭 모멘트의 안정성을 증가시켰다.
3.2 유동펜스 효과
그림 13은 주익 끝단 유동펜스 부착 유무에 따 른 양력계수의 변화를 보여준다. 특히 나셀 틸팅 각이 30도인 경우에는 유동펜스를 부착함에 따라 최대양력계수가 증가하는 모습을 보여준다. 나셀 틸팅각 60도인 경우 유동펜스에 의한 양력계수 증가는 받음각이 증가할수록 계속해서 증가하는 결과를 보여준다. 이 각도에서는 tilt rotor에 하중 이 급격히 변화하며, 가능한 높은 양력을 얻어야 하기 때문에 유동펜스의 적용이 매우 바람직한 결과를 보여준다. 나셀 틸팅각이 30도와 60도인 경우에 유동펜스를 부착함으로써 얻어진 최대 양 력계수의 증가량은 각각 2.4%와 7.3%이다.
-0.5 0.0 0.5 1.0 1.5 2.0 2.5
-8 -6 -4 -2 0 2 4 6 8 10 12 14 16
Angle of Attack
Lift Coefficient
N0F0_No_WF N0F0_WF N30F30_No_WF
N30F30_WF N60F30_No_WF N60F30_WF
N90F50_No_WF N90F50_WF
그림 13. flow fence에 의한 양력계수 변화
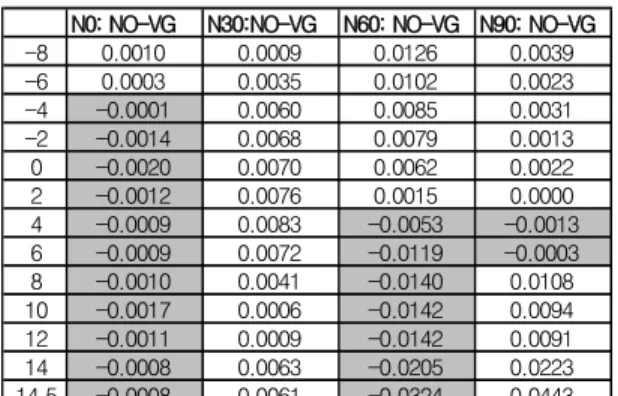
그림 14는 나셀 틸팅각이 0도인 경우에는 유 동펜스를 적용하는 것이 최대 20count 정도의 항 력 증가를 초래하지만, 나셀 틸팅각이 30도이면 서 flaperon 변위각이 30도인 경우에는 유동펜스 를 부착할 때 항력증가가 적다는 사실을 보여준 다. 이는 나셀에서 떨어져 나오는 박리가 주익에 미치는 영향을 줄여주는 유동펜스에 기인한 것으 로 추정된다. 나셀 틸팅이 60도인 경우에는 낮은 받음각 영역에서는 유동펜스에 의해서 항력이 감 소하나 받음각이 2도를 넘으면서 항력이 증가하 고 있다.
-0.2 -0.15 -0.1 -0.05 0 0.05 0.1
-8 -6 -4 -2 0 2 4 6 8 10 12 14 16
Angle of Attack
Pitching Moment Coefficient
N0F0_No_WF N0F0_WF N30F30_No_WF
N30F30_WF N60F30_No_WF N60F30_WF
N90F50_No_WF N90F50_WF
그림 14. flow fence에 의한 피칭모멘트계수 변화
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8
-10 -5 0Angle of Attack5 10 15 20
Drag Coefficient
N0F0_NO VG NOF0 VG N30F30_NO VG N30F30_VG
N60F30_NOVG N60F30_VG H90F50_NOVG H90F50_VG
그림 15. flow fence에 의한 항력계수 변화
표 4. flow fence적용과 나셀 틸팅각에 의한 항력계수 변화 N0: NO-VG N30:NO-VG N60: NO-VG N90: NO-VG
-8 0.0010 0.0009 0.0126 0.0039
-6 0.0003 0.0035 0.0102 0.0023
-4 -0.0001 0.0060 0.0085 0.0031
-2 -0.0014 0.0068 0.0079 0.0013
0 -0.0020 0.0070 0.0062 0.0022
2 -0.0012 0.0076 0.0015 0.0000
4 -0.0009 0.0083 -0.0053 -0.0013 6 -0.0009 0.0072 -0.0119 -0.0003
8 -0.0010 0.0041 -0.0140 0.0108
10 -0.0017 0.0006 -0.0142 0.0094 12 -0.0011 0.0009 -0.0142 0.0091 14 -0.0008 0.0063 -0.0205 0.0223 14.5 -0.0008 0.0061 -0.0324 0.0443
-0.02 -0.01 0.00 0.01 0.02 0.03 0.04 0.05
-10 -5 0 5 10 15 20 25
Angle of Yaw
Rolling Moment Coefficient
N0F0_No VG N0F0_VG
N30F30_No VG N30F30_VG
N60F30_No VG N60F30_VG
N90F50_No VG N90F50_VG
그림 16. 요잉모멘트 변화(요우 운동)
다음은 Lateral/Directional 공력계수에 유동펜 스가 어떠한 영향을 주는지를 분석하고자 한다.
그림 16은 롤링모멘트의 특성을 보여주는데, 전 반적으로 Yaw각이 증가할수록 유동펜스를 적용 하면 보다 효율적인 조종력을 생성하고 있음을 보여준다. 유동펜스를 부착하지 않은 경우는 Yaw각에 따라 롤링모멘트 특성이 비선형적인 특 성을 보여주는 반면에, 유동펜스를 부착하면 선 형적인 특성을 갖도록 개선하는 효과가 있다. 유 동펜스의 근본적인 사용 목적은 V-22 풍동시험 과정에서 나셀 틸팅각이 60도 근방에서는 상당한 유동박리가 공력특성이 변화하는 현상을 목격하 였다는 관련 분야 시험 전문가[6]의 의견에 따라 부착하였다. 측정 결과에서도 유동펜스가 없는 경우 Yaw 방향으로 스마트 무인기를 이동시켜도
충분한 조종력을 생성할 수 없었는데, 유동펜스 부착함으로써 좀 더 안정적인 특성을 갖는 롤링 모멘트 특성을 확보할 수 있게 되었다.
-0.10 -0.05 0.00 0.05 0.10 0.15 0.20 0.25 0.30 0.35 0.40
-10 -5 0 5 10 15 20 25
Angle of Yaw
Side Force Coefficient
N0F0_No VG N0F0_VG
N30F30_No VG N30F30_VG N60F30_No VG N60F30_VG N90F50 No VG N90F50 VG 그림 17. 측력계수 변화 (요우 운동)
그림 17은 Yaw 운동에 대한 측력계수를 보여 준다. 나셀 틸팅각이 증가할수록 나셀에서 박리되 는 영향이 증가하여 측력계수의 기울기가 감소하 는 경향을 보여준다. 유동펜스 부착에 의한 효과 는 측력계수 기울기가 증가하는 방향으로 이끈다.
요잉 모멘트계수는 Yaw각이 증가할수록 감소 하는 특성을 가지고 있어 안정적인 공력특성을 가지고 있다. 요잉 모멘트는 유동펜스의 부착 여 부와는 무관하게 매우 일정한 특성을 가지고 있 어, 유동펜스에 의한 요잉 모멘트계수에는 변화 가 없다고 간주하여도 무방한 수준이다.
스마트 무인기에 유동펜스를 부착하면, 나셀 틸팅에 의한 박리된 유동이 주익의 outboard의 공력특성을 저해하는 효과는 줄여주어 받음각이 증가할수록 양력계수가 증가하는 결과를 보여주 고, 나셀 틸팅각이 90도인 경우에서는 더욱 안정 적인 피칭모멘트를 갖도록 하며, 나셀 틸팅 30과 60도에서는 항력계수를 감소시키는 역할을 한다.
Yaw 운동에서는 Lateral과 Directional 안정성을 더욱 증진시키는 역할을 하며, 특히 롤링모멘트 는 Yaw각이 증가할수록 조종력의 효율을 증가시 키는 역할을 한다.
-0.08 -0.07 -0.06 -0.05 -0.04 -0.03 -0.02 -0.01 0.00 0.01 0.02 0.03
-10 -5 0 5 10 15 20 25
Angle of Yaw
Yawing Moment Coefficient
N0F0_No VG N0F0_VG
N30F30_No VG N30F30_VG N60F30_No VG N60F30_VG N90F50_No VG N90F50_VG
그림 18. 요잉모멘트계수 변화(요우 운동)
4. 결 론
스마트 무인기의 공력특성을 향상시키기 위해 유동제어 장치인 와류생성기와 유동펜스를 적용 했을 때 효과를 풍동시험을 통하여 검증하였다.
와류생성기는 높이가 10, 5, 3mm인 세 가지 종류를 사용하여 시험하였다. 초기 TR-S2 형상에 사용한 높이 10mm의 와류생성기는 Flaperon 변 위각을 10도로 유지하면서 운항하는 loitering 조 건을 목표로 사용하였다. 와류생성기를 사용한 경우 최대 양력계수가 23% 증가하였으나, 반면 항력계수도 증가하여 양항비가 0.2% 감소하였다.
이를 개선하기 위하여 TR-S4 형상 시험에서는 높이 5mm와 3mm의 와류생성기를 사용한 결과 와 장착 전 결과를 비교하였다. 3mm 높이를 사 용한 경우에는 최대 양력계수가 14% 증가하였 고, 양항비는 1.5% 감소하였다. 이는 10mm 높이 의 와류생성기를 부착한 경우 장착 전 형상에서 경험한 5.7%의 양항비 감소보다 매우 적은 값으 로, 3mm 와류생성기를 부착하면 스마트 무인기 의 Loitering(Flaperon 10도) 조건에서는 양항비 가 증가할 것으로 예상된다. 와류생성기를 사용 할 때 피칭모멘트계수에는 변화를 관찰할 수 없 었으나, 전반적으로 약간씩 스마트 무인기가 pitch-up 하려는 경향이 약간 증가함을 보여준다.
유동펜스는 나셀 틸팅각이 높아지는 경우, 나 셀에서 떨어져 나오는 박리에 의해서 주익의 성 능이 저하되는 현상을 방지하기 위하여 주익의 끝단에 부착을 하고 공력계수 변화 특성을 측정 하였다. 유동펜스 부착으로 나셀 틸팅각이 30과 60도인 경우에는 최대 양력계수가 2.4%와 7.3%
증가하는 효과를 확인하였다. 피칭모멘트는 대부 분 나셀 틸팅 조건에서는 별 영향이 없었으나, 90도에서는 longitudinal 안정성을 증가시키는 역 할을 한다. 반면에 유동펜스를 부착한 경우 나셀 틸팅각 0도에서는 장착 전보다 약 20 count (0.0020)의 항력이 증가되었는데, 나셀 틸팅각이 30과 60도인 경우에는 유동펜스에 의해 나셀 박 리 효과가 주익으로 전달되지 않아, 항력계수는 감소하는 결과를 확인하였다. Lateral/direction 공력특성 중에서 유동펜스에 의한 효과는 롤링모 멘트계수 변화에서 찾아볼 수 있는데, 유동펜스 를 부착하면 조종력 효율이 점점 증가하는 경향 을 보여주고 있다. 측력계수와 요잉 모멘트계수 는 유동펜스의 부착과는 무관하게 일정한 경향을 보여준다.
참 고 문 헌
1. Chung, J. Yoon, S. and Cho, T., 2005,
"Wind Tunnel Test of Smart Un-manned Aerial Vehicle(SUAV) for TR-E2
Configuration," Trans. of the KSME(B), Vol. 29, No.1, pp. 35 - 45.
2. Chung, J., Choi, S. and Cho, T., 2005,
"Static Wind Tunnel Test of Smart Un-manned Aerial Vehicle(SUAV) for TR-S2 Configuration," Trans. of the KSME(B), Vol. 29, No. 6, pp. 755 - 762.
3. Chung, J., Lee, J., Sung, B. and Koo, S., 2003, "Wind Tunnel Test of a Unmanned Aerial Vehicle(UAV)," KSME International Journal, Vol. 17, No. 5, pp. 776~783.
4. Barrett, R., and Farokh, S., "On the
Aerodynamics and Performance of Active Vortex Generators," AIAA Paper
93-3447-CP, 1993.
5. Bragg, M., and Gregorek, G.M.,
"Experimental Study of Airfoil Performance with Vortex Generators,"
Journal of Aircraft, Vol. 26, No.7, 1989, pp.689-691.
6. Hodder. D, [email protected]