크리깅 모델을 이용한 곱분해 기법에서 정확하고 강건한 통계적 모멘트 계산을 위한 전역모델의 비교 분석
김태균† · 이태희*
Comparison of global models for calculation of accurate and robust statistical moments in MD method based Kriging metamodel
Tae Kyun Kim, Tae Hee Lee
Key Words : RBDO(신뢰성 기반 최적설계), Reliability Analysis(신뢰성 해석), Kriging
metamodel(크리깅 모델), MD method(곱 분해기법), Pearson System(피어슨 시스템)
Abstract
Moment-based reliability analysis is the method to calculate reliability using Pearson System with first-four raw moments obtained from simulation model. But it is too expensive to calculate first four moments from complicate simulation model. To overcome this drawback the MD(multiplicative decomposition) method which approximates simulation model to kriging metamodel and calculates first four raw moments explicitly with multiplicative
decomposition techniques. In general, kriging metamodel is an interpolation model that is decomposed of global model and local model. The global model, in general, can be used as the constant global model, the 1st order global model, or the 2nd order global model. In this paper, the influences of global models on the accuracy and robustness of raw moments are examined and compared. Finally, we suggest the best global model which can provide exact and robust raw moments using MD method.
기호설명
R : 시스템의 신뢰도
pf : 파괴확률 )
(x
Y : 실제모델 )
X(x
f : 확률밀도함수
) ˆ x(
Y : 크리깅모델
β x
f( )Tˆ: 전역모델 ) *
(x γ
r T : 국부모델
R : 상관행렬
θ : 상관계수벡터
)
r(x : 상관벡터
µ : 평균
σ2 : 분산
β1 : 왜도
β : 2 첨도
ml : l차 모멘트
( )Y
f : Y의 확률밀도함수
1. 서 론
신뢰성 기반 최적설계(reliability based design optimization: RBDO)는 최적설계에 앞서 신뢰성 해석 (reliability analysis)이 선행되어야 한다.
그리고 정확한 RBDO 해를 얻기 위해서는 정확한 신뢰성 해석이 필요하다. 신뢰성 해석은 식 (1)과 같이 정의할 수 있다.
{ } ∫
≤
=
≤
=
−
=
0 ) (
) ( 0
) ( 1
x
x x X
Y X
f PY f d
p
R (1)
† 회원, 한양대학교 자동차공학부 E-mail : [email protected] TEL : (02)2220-0449
*
한양대학교 기계공학부대한기계학회 2008년도 추계학술대회 논문집
여기서 Y(x)는 설계변수x 에 대한 시스템의 성능함수(performance function)이고 Y(x) ≤0 는 시스템의 안전 영역(safe region)을 의미한다.
일반적으로 시스템의 신뢰도를 구하는 방법은 크게 2 가지로 나누어볼 수 있다. 먼저 FORM(first order reliability methods)(1)과 SORM(second order reliability methods)(2,3)과 같이 성능함수(performance function)를 테일러 급수를 통해 1 차 혹은 2 차로 근사화 하고 최대 가능 손상점(most probable failure point; MPP)(4)을 이용하여 신뢰도를 구하는 근사화 기법이 있고 또 한계 상태방정식의 1-4 차 모멘트를 통해 피어슨 시스템(Pearson System)(5)을 이용하여 신뢰도를 구하는 모멘트 기반 신뢰성 해석(moment-based reliability analysis)이 있다.
여기서 기존의 모멘트 기반 신뢰도해석은 전조합 실시법(full factorial design)과 피어슨 시스템을 이용하여 신뢰도를 계산하는 전조합 모멘트법(full factorial moment method; FFMM)(6), FFMM 의 수치적 비용 문제를 해결하기 위해서 제안된 반응표면 모멘트법(response surface augmented moment method;
RSMM)(7), 다차원문제에서 통계적 모멘트를 효율적으로 구하기 위해서 제안된 DR 법 (dimension reduction method)(8), 그리고 기존의 DR 법의 문제점을 해결하고 정확성, 효율성, 안정성을 향상시킨 eDR 법(enhanced dimension reduction method)(9)과 다차원 적분을 1 차원 적분의 곱으로 표현하여 성능함수의 1-4 차 모멘트를 정확하게 구해주는 곱분해 기법 (multiplicative decomposition method; MD)(10)이 있다.
일반적으로 곱분해 기법을 통해서 신뢰성 해석을 수행할 때 크리깅 모델을 사용한다.
크리깅 모델은 전역모델과 국부모델로 이루어져 있는데 전역모델은 상수모델, 1 차 모델, 2 차 모델로 설계자의 결정에 의해서 정해지는 모델이다. (11)
본 연구에서는 크리깅 모델을 이용한 곱 분해기법을 통해 신뢰성 해석을 수행할 전역모델의 차수가 신뢰성해석에 끼치는 영향도를 평가한다.
2. 크리깅 모델
크리깅 모델에서 실제 응답함수는 전역모델 β
x
f( )T 과 이것으로부터의 편차(deviation)를 나타낸 )
z(x 의 합으로 가정하고 예측응답을 식 (2)와 같 이 정의한다. (3)
( )
x z β x f x = T +Yˆ( ) ( ) (2)
식(2)에서 크리깅 모델의 전역모델은 일반화된 최소제곱법(generalized least squared method)에 의해
추정한다. 이때, f(x) 는 회귀모델을 구성하는 함 수이고 β는 추정된 회귀모델의 계수이다. z(x)는 편차를 나타내는 것으로, 평균이 0 이고 공분산이 아래와 같은 식(3)으로 표현이 된다.
) , , ( )]
( ), (
[z xi z xj 2R xi xj θ
Cov =σ (3)
여기서 z(x) 의 공분산은 σ2 와 상관행렬 )
, , (x x θ
R i j 의 곱으로 나타낼 수 있다. 상관행렬을 구성하는 상관함수 R(xi,xj,θ) 는 식(4)와 같이 Gaussian 상관관계로 정의한다.(4)
( ) ⎥
⎦
⎢ ⎤
⎣
⎡− −
=
∑
= nd
k
j i k j
i
1
exp 2
,
,x θ x x
x
R θ (4)
여기서 nd는 설계변수의 개수, θ=
[
θ1,L,θnd]
T는 최 우량 추정법(maximum likelihood method)을 통해서 구해지는 상관인자(correlation parameter)이고 식 (2) 의 크리깅 모델은 식(5)와 같이 유도된다.) *
ˆ ( ) ( )
ˆ(x f xTβ r xTγ
Y = + (5)
여기서 βˆ=(FTR−1F)−1FTR−1Y 로 일반화된 최소자승 추정치 (generalized least squared estimate)이고
(
Y Fβ)
R
γ*= −1 − ˆ 로 표현된다. r(x) 는 예측점x 와 실험점xi 의 상관관계를 나타내는 상관벡터로 식 (4)를 이용하여 나타내면 식(6)과 같이 표현할 수 있다.
( )
x [R(x,x1),R(x,x2), ,R(x,xn)]Tr = L (6)
이처럼 크리깅 모델은 f(x)Tβˆ 의 전역모델과 ) *
(x γ
r T 의 국부모델의 합으로 표현되는 보간모델 이다. 일반적으로 크리깅 모델의 전역모델은 상수, 1 차, 2 차 전역모델로 구분되고 설계자에 의해서 결정된다.
3. 신뢰성 해석
신뢰성 해석은 곱분해 기법(10)을 통해서 구한 성능함수의 통계적 모멘트를 피어슨 시스템을 이 용하여 분포의 특성 및 확률밀도함수를 구하고 이 를 통해서 시스템의 신뢰도 및 파괴확률을 구하는 과정이다.
3.1 곱분해 기법
시스템의 통계적 모멘트는 다음과 같다.
4 4
2
3 3
1
2 2
/ ) ( ) ) ( (
/ ) ( ) ) ( (
) ( ) ) ( (
) ( ) (
σ µ
β
σ µ
β
µ σ
µ
∫
∫
∫
∫
Ω Ω Ω Ω
−
=
−
=
−
=
=
x x x
x x x
x x x
x x x
d f Y
d f Y
d f Y
d f Y
X X X X
(7)
여기서 µ,σ , β1 ,β2는 각각 평균, 표준편차, 왜도, 첨도를 의미하고 fX(x)는 랜덤변수 x의 확률밀도함수를 의미한다. 이때 식 (7)과 같은 통 계적 모멘트를 구하기 위한 1-4 차모멘트는 다음 과 같은 과정을 통해서 구한다.
) 4 , 3 , 2 , 1 ( ) ( )
( =
=
∫
ΩY f d lml x l X x x (8) 이처럼 구해진 1-4 차 모멘트를 이용하여 수식 (9)를 통해 통계적 모멘트를 구한다.
4
4 1 2 2 1 3 1 4 2
3 3 1 2 1 3 1
2 1 2 2
1
3 6
4
3 3
β σ β σ σ µ
m m m m m m
m m m m
m m m
− +
= −
+
= −
−
=
=
(9)
여기서 1-4 차 모멘트를 실제모델을 이용하여 구하게 되면 많은 수치적 비용과 계산이 필요하기 때문에 효율성에서 떨어지고 또 설계변수가 증가 하게 되면 비용이 급격히 상승하게 된다. 이러한 문제를 해결하기 위해서 실제 모델을 크리깅 모델 로 근사화하여 모멘트를 구한다.
∫
∫
∫
∫
∫
∫
∫
∫
Ω Ω
Ω Ω
Ω Ω
Ω Ω
≅
=
≅
=
≅
=
≅
=
x x x x x x x
x x x x x x x
x x x x x x x
x x x x x x
d f Y Y d f Y m
d f Y Y d f Y m
d f Y Y d f Y m
d f Y d f Y m
X X
X X
X X
X X
) ( ) ˆ( ) ˆ( ) ( ) (
) ( ) ˆ( ) ˆ( ) ( ) (
) ( ) ˆ( ) ˆ( ) ( ) (
) ( ) ˆ( ) ( ) (
2 2 4
4
2 3
3
2 2
1
(10)
이때 ˆ( )
2 x
Y 는 실제모델의 응답을 제곱하여 크 리깅 모델로 근사화한 모델을 의미한다.
크리깅 모델의 전역모델을 상수로 가정하여 1,3 차모멘트를 구하는 것은 각각 식(11), (12)처럼 유 도된다.
∫ ∫ ∏
∫ ∫ ∏
∫
∞
∞
−
∞
∞
− =
⎟⎟⎠
⎞
⎜⎜⎝
⎛ −
−
−
∞
∞
−
∞
∞
− =
⎟⎟⎠
⎞
⎜⎜⎝
⎛ −
− − Ω
=
− +
=
− +
=
≅
D D
k
x
k T
D D
k
x
k T
X
dx dx e
dx dx e
d f Y m
k k k
k k k
L L
L L
1 1
2 1 1
1 1
2 1 1
1
2 2
2 ) 1 (
ˆ) ˆ (
2 )} 1 ( ˆ ) ˆ ( {
) ( ) ˆ(
σ µ
σ µ
σ π β β
σ β π
β
x r J
F Y R J
F Y R x r
x x x
(11)
ˆ) ( ˆ),
(
2 ) 1 ( ) ( ˆ ˆ ˆ ˆ
) ( ) ˆ( ) ˆ( ) ( ) (
2 2 1 2 2 1
1 1
2 1
2 2 2 2 2 2
2 3
3
1
1
2
β β
σ π β
β β β
σ µ
F Y R α F
Y R α
x r x r Q
Qα α α J α J
x x x x x x x
−
=
−
=
=
+ + +
=
≅
=
−
−
=
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛ −
− Ω
Ω
∫ ∫ ∏
∫
∫
D
D
dk dk u dk
l u
l
D D
k
x
dk T
T T T
X X
dx dx e
d f Y Y d f Y m
L L
(12)
또 전역모델을 2 차로 가정하여 1,3 차모멘트를 구하는 방법은 각각 식(13),(14)와 같다.
∫ ∫ ∫ ∏
∫ ∫ ∫ ∏
∫ ∫ ∏
∫
=
=
∞
∞
−
∞
∞
− =
− Ω
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛− −
=
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛− −
=
− +
=
⎟⎟⎠
⎞
⎜⎜⎝
⎛− −
− +
=
≅
D
D k
k D
D k
k u
l u
l u
l D
k k
k k k u
l u
l u
l D
k k
k k k T
T
D D
k k
k k k T
T X
x d x d
dx x dx
d f Y m
1
1 1
1
1
2 2 1
2 2
1 1
2 2 1
1
2 ) exp ( 2 ) 1 (
2 ) exp ( 2 ) 1 ( ˆ) ˆ (
2 ) exp ( 2 )} 1 ( ˆ ) ˆ ( ) ( {
) ( ) ˆ(
x x
r J
x x
f L
β F Y J β L
F Y R x r x f
x x x
σ µ σ
π
σ µ σ
π
σ µ σ
β π β
L L
L L
L L
(13)
∫ ∫ ∫ ∏
∫ ∫ ∫ ∏
∫ ∫ ∫ ∏
∫ ∫ ∫ ∏
∫∫
=
=
=
=
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛− −
=
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛− −
=
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛− −
=
⎟⎟⎠
⎜⎜ ⎞
⎝
⎛− −
=
−
− +
− +
− +
=
=
D
D k
k D
D k
k D
D k
k D
D k
k
u
l u
l u
l
D
k k
k k k T u
l u
l u
l
D
k k
k k k T u
l u
l u
l
D
k k
k k k T u
l u
l u
l
D
k k
k k k T
T T T
T T T
X
x d x d x d x d d
f Y Y m
1
1 1
1 1
1 1
1
1
2 2 2
1
2 2 2
2
1
2 2 1
1
2 2
2 2
2 2 2 2 3
2 ) exp (
2 ) 1 ( ) (
2 ) exp (
2 ) 1 ( ) (
2 ) exp (
2 ) 1 ( ) (
2 ) exp (
2 ) 1 ( ) (
] ˆ) ( ˆ) ( ˆ) ˆ ( ˆ) ˆ (
ˆ [ˆ
) ( ) ˆ( ) ˆ(
x x
r x r Q
x x
r x f H
x x
r x f H
x x
f x f V
β F Y Q β F Y β F Y H β β F Y H β β V β
x x x x
σ µ σ
π
σ µ σ
π
σ µ σ
π
σ µ σ
π
L L
L L
L L
L L
(14)
이렇게 실제응답을 크리깅 모델로 근사화하여 식 (15), (16)과 같이 다중적분을 1 차원적분의 곱 을 통해서 1- 4 차 모멘트를 구하는 방법이 곱분해 기법이다.
⎟⎟⎠
⎞
⎜⎜⎝
⎛
⎟⎟⎠
⎞
⎜⎜⎝
=⎛
=
∫
∫
∫ ∫∏
∞
∞
−
′ −
−
−
−
∞
∞
−
′ −
−
−
−
∞
∞
−
∞
∞
−
⎟⎟⎠
⎜⎜ ⎞
⎝
−⎛ −
=
−
−
D x s x D x
s x
D x
k D
k s x i
dx e
dx e
dx dx e e
J
D D D i D D D i
k k k i
k k k
2 2 2
1 1 1 2 1 1 1
2 2
) ( ) ( 1
) ( ) (
1
1 2 1
1 ) (
2 1 2
1
2 1
µ θ θ µ
θ θ
σ µ θ
σ π σ
π
σ π
L L
L (15)
2 '
1 2 1 )
( 1
) (
2 / 1
2
1 1
1
2 2
2
k k u
l u
l
D x
k t x D
k s x ij
D
D
k k k j
k k k i k k
k e e dx dx
e Q
σ θ
σ π
σ µ θ θ
=
=∫ ∫∏ ⎟⎟⎠
⎜⎜ ⎞
⎝
⎛ −
− −
−′′
=
−
− L
L (16)
여기서 i 는 크리깅모델을 생성할때 사용된 실 험점, j 는 응답을 제곱한 크리깅모델을 생성할 때의 실험점, D는 설계변수의 개수, θk" 는 응답
을 제곱한 크리깅 모델을 생성할 때 사용되는 상 관계수를 의미한다.
3.1.2 피어슨 시스템
피어슨 시스템(4)은 식 (17)의 미분 방정식을 만 족시키는 확률 밀도 함수로 구성된다.
( ) ( )
2 2 1 0
1 0
y b y b b
a y y
d Y df Y
f + +
= − (17)
여기서 y,a0,b0,b1,b2,A 는 각각 y= Y−µ , A
b0=−σ2(4β2−3β1)/ , a0=b1=−σ β1(β2+3)/A , A
b2=−(2β2−3β1−6)/ , A=(10β2−12β1−18)이다.
MD 기법을 이용하여 구한 1-4 차 모멘트를 이용 하여 방정식의 계수
2 1 0,b,b
b 를 구하고 이를 통해 서 얻은 미분방정식 b0+b1y+b2y2의 해의 형태에 따라 분포의 종류와 함수가 결정이 된다. 이를 통 해서 신뢰도를 얻을 수 있게 된다.
4. 예 제
위와 같은 방법을 통해서 시스템의 신뢰도를 얻 을 수 있는데 이때 곱분해 기법에서 사용되는 크 리깅 모델에서 전역모델을 어떤 전역모델을 이용 하여 1-4 차 모멘트를 구하는 것이 가장 정확한 것인가에 대하여 평가 한다.
먼저 전역모델은 상수모델, 1 차 모델, 2 차 모델 을 사용하였고 크리깅모델의 설계영역은 µ 3± σ , 1-4 차 모멘트를 구하기 위한 적분한 구간은
σ
µ 6± 로 하여 계산하였다.
그리고 크리깅모델의 정확도를 판별하기 위해서 사용된 방법은 식(18)과 같이 평균제곱근오차(root mean square error; RMSE)를 이용하여 평가했다.
( ) ( )
( ) ⎟
⎠
⎜ ⎞
⎝
⎛ −
=
∑
= m
i
i
i y
m y RMSE
1
ˆ 2
1 x x (18)
4.1 1 차원 비선형 예제
먼저 간단한 수학적 예제를 통해서 어떤 전역모 델을 이용하는 것이 가장 정확한 모멘트를 계산할 수 있는가를 알아보도록 한다.
( ) ( ) ( )
) 2 , 6 (
~
4 / cos 3 6 / sin 3 / sin ) (
N 2
x
x x
x x
y =− π π + π
Fig. 1 과 같이 실제모델과 전역모델을 상수모델, 1 차 모델, 2 차 모델을 이용하여 근사화한 각각의 크리깅모델이 설계영역에서는 정확히 일치하는 것 을 확인할 수 있다. 샘플링점은 10 개로 하였고 이 때의 RMSE 값은 각각 2.044e−15, 1.601e−15,
14 019 .
1 e− 로 실제 모델과 정확하는 것을 확인할 수 있었다.
이때 1-4 차 모멘트를 구하기 위해서 적분구간 인 µ 6± σ까지 확장하여 각각의 전역모델에 대한 크리깅 모델을 근사화하면 Fig. 2 와 같이 표현되 는 것을 알 수 있다.
실제 모델을 근사화한 영역인 [0,12] 에서는 실제모델과 정확히 일치하지만 이 영역을 벗어난 구간에서는 각각의 전역모델에 따라 다른 응답특
성을 보이는 것을 확인할 수 있다. 전역모델을 상 수모델로 가정한 모델은 0 으로 수렴하는 모습을 보이고 1 차 모델과 2 차 모델은 상수 모델보다 응 답값이 큰 차이가 나는 것을 확인할 수 있다.
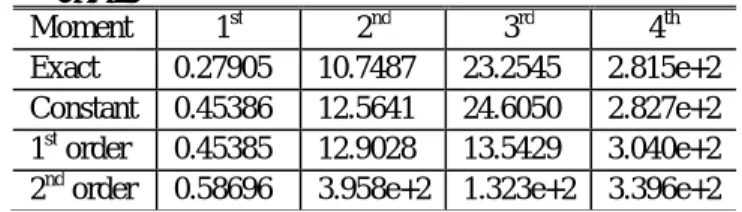
이와 같이 전역모델을 상수, 1 차, 2 차로 근사화 한 모델과 실제모델을 통해서 얻어진 1-4 차 모멘 트를 구하면 Table 1 과 같다.
Table 1 에서도 알 수 있듯이 실제모델의 모멘트 와 가장 잘 일치하는 것은 전역모델을 상수모델로 가정한 크리깅모델을 통해서 구한 1-4 차 모멘트 가 가장 잘 일치하는 것을 확인할 수 있다.
이 이유는 설계구간인 µ 3± σ 영역에서는 모든 전역모델이 실제모델과 정확하게 일치하지만 적분 구간인 µ 6± σ 에서의 외삽구간에서는 실제모델을 정확하게 근사화시켜주지 못하기 때문이다.
Fig. 3 은 크리깅모델과 확률밀도함수를 곱한 값 을 나타낸 것이다.
그림에서 보는 바와 같이 설계구간에서는 전역 모델이 상수, 1 차, 2 차모델을 이용한 크리깅모델의 곱과 확률밀도함수의 곱이 모두 일치하지만 외삽 구간에서는 각각 전역모델에 따라 응답이 다른 것 을 알 수 있다.
0 2 4 6 8 10 12
-4 -3 -2 -1 0 1 2 3 4 5 6
x
Y(x)
True model Constant 1st order 2st order
Fig. 1 True model and kriging model
-10 -5 0 5 10 15 20
-12 -10 -8 -6 -4 -2 0 2 4 6 8
x Y2(x)
Constant 1st Order 2nd Order
Fig. 2 Kriging metamodel within µ 6± σ
Interpolation region Extrapolation region Extrapolation region
-10 -5 0 5 10 15 20 -0.2
-0.1 0 0.1 0.2 0.3 0.4 0.5 0.6
x
Y(x)x pdf
True integrant Constant 1st Order 2nd Order
Fig. 3 Multiplication of PDF and kriging metamodels for three different global models
이처럼 1-4 차 모멘트값이 전역모델의 영향으로 인한 것인가를 확인하기 위하여 크리깅모델의 설 계구간을 적분구간인 µ 6± σ 까지 확장시켜 근사 화한후 1-4 차 모멘트를 구해보았다. Table2 에서 보 는 바와 같이 전역모델로 인한 영향이라는 것을 확인할 수 있다.
4.2 설계변수간의 교호작용과 비선형성이 강한 문제
) 3 . 0 , 6 (
~ ,
4 . 0 07 . 1 0
sin 3 3 ) (
2 2
1
) 95 . 5 ( 5 . 2 ) 95 . 5 ( 5 . 2 1 2
2 2 2 1
N X X
e X Y X
X
X ⎟+
⎠
⎜ ⎞
⎝
⎛ +
⎟⎠
⎜ ⎞
⎝
⎛ −
= − + −
X
샘플링점의 개수는 36 개를 사용하였고 응답의 제곱을 한 크리깅 모델의 샘플링 개수는 49 개를 사용하였다. 이때 RMSE 은 모두 0.001이고 실제 모델과 거의 정확히 일치하는 것을 알 수 있다.
Table 3 에서 보는 바와 같이 크리깅 모델의 전 역모델을 상수, 1 차, 2 차로 가정했을 때 모두 실제 모멘트와 정확히 일치하는 것을 확인할 수 있었다.
그 이유는 시스템의 응답값이 [−0.5 1]구간에 존 재하고 이는 1-4 차모멘트를 구하는 과정에서 전 역모델의 영향이 크지 않기 때문이다.
실제로 다음 예제에서 보는 바와 같이 응답영역 이 크면 전역모델의 영향이 모멘트를 구하는 과정 에서 큰 영향을 미치는 것을 확인할 수 있다.
4.3 설계변수간의 교호작용이 있는 2 차원 문제
) 5 . 1 , 15 (
~ ), 3 . 1 , 13 (
~
16000 1 )
(
2 2
2 1
2 1 2 2 2 1
N X N
X
X X X
Y X = X + − −
샘플링점의 개수는 36 개를 사용하였고 응답을 제곱한 크리깅 모델의 샘플링 개수는 49 개를 사 용하였다. 이때 RMSE 은 모두 0.001이고 실제모 델과 거의 정확히 일치하는 것을 알 수 있다.
Table 1 Results of first four raw moments for Ex. 4.1 Moment 1st 2nd 3rd 4th Exact 0.27905 10.7487 23.2545 2.815e+2 Constant 0.45386 12.5641 24.6050 2.827e+2 1st order 0.45385 12.9028 13.5429 3.040e+2 2nd order 0.58696 3.958e+2 1.323e+2 3.396e+2 Table 2 Results of first four raw moments for Ex. 4.1 Moment 1st 2nd 3rd 4th Exact 0.27905 10.7487 23.2545 2.815e+2 Constant 0.27878 10.6109 23.8564 2.830e+2 1storder 0.27878 10.6109 23.8563 2.830e+2 2ndorder 0.27878 10.7107 22.5678 2.880e+2 Table 3 Results of first four raw moments for Ex. 4.2 Moment 1st 2nd 3rd 4th Exact 0.40000 0.22129 0.13753 0.09112 Constant 0.40000 0.22128 0.13753 0.09112 1storder 0.40000 0.22127 0.12717 0.09108 2ndorder 0.40000 0.22058 0.12672 0.09009
Table 4 Results of first four raw moments for Ex. 4.3 Moment 1st 2nd 3rd 4th Exact 0.82693 0.99643 1.46082 2.51489 Constant 0.82691 0.99626 1.46076 2.52031 1storder 0.82691 0.99644 1.46118 2.506073 2ndorder 0.82692 1.09197 5.74208 1.1711e+2
Table 4 에서 보는 바와 같이 크리깅의 전역모델 을 상수, 1 차, 2 차로 가정했을 때 실제응답을 이용 하여 구한 모멘트와 가장 잘 일치하는 모델은 상 수, 1 차모델이었고 2 차 전역모델을 이용하면 3 차, 4 차 모멘트에서 큰 오차가 있는 것을 알 수 있었 다.
5. 결론 및 향후 과제
지금까지 신뢰성기반 최적설계을 하기 위해서 선행되어야 할 신뢰성해석에서 곱분해기법을 이용 한 신뢰성해석에 대해서 알아보았다. 곱 분해기법 은 실제 응답을 근사모델인 크리깅모델을 이용하 여 통계적 모멘트를 구하는 방법으로 실제모델을 크리깅모델로 정확하게 근사화해주는 장점이 있기 때문에 다른 모멘트 기반 신뢰성해석보다 더 정확 한 값을 얻을 수 있는 장점이 있다.
하지만 크리깅모델의 전역모델은 상수, 1 차, 2 차 모델로 이루어져 있으며 설계자의 선택에 따라서 정해지게 되는데 신뢰성해석에서는 전역모델을 상 수모델로 가정하여 구하는 것이 가장 좋은 결과를 얻을 수 있다는 것을 알 수 있었다.
그 이유는 크리깅모델의 설계구간인 µ 3± σ 영 역에서는 실제모델과 크리깅모델이 정확히 일치하 지만 적분구간인 µ 6± σ 영역에서는 크리깅의 전 역모델이 2 차인 경우가 실제 응답과 큰 오차를 가질 확률이 더 높기 때문이다.
예제에서도 확인했듯이 응답구간이 크면 클 수 록 그 오차는 큰 것을 알 수 있었고 반면에 응답 영역이 작으면 어떤 전역모델을 사용해도 큰 오차 가 없다는 것을 확인할 수 있었다.
실제로 수치적 과정까지 포함을 하게 되면 신뢰 성해석을 하기 위한 곱분해기법에서 사용되는 크 리깅모델의 전역모델은 상수모델이 가장 좋은 모 델이라는 이라는 것을 알 수 있었다.
참고문헌
(1) Cornell, C.A., 1969, "A Probability-based Structural Code, " Journal of the American Concrete Institute, Vol.
66, No. 12, pp. 974-985
(2) Kiureghian, A.D., Lin, H.Z., and Hwang, S.J., 1987,
"Second Order Reliability Analysis Approximations,"
Journal of Engineering Mechanics, ASCE, Vol. 113, No.
9, pp1208-1225
(3) Breitung K., 1984, "Asymptotic approximations for multi-normal integrals," Journal of Engineering
Mechanics Division, ASCE, Vol. 110, No. 3, pp. 357-366.
(4) 양영순, 서용석, 이재옥., 1999, 구조 신뢰성 공학, 서울대학교 출판부.
(5) Johnson, N.L., Kots, S., and Balakrishnan, N., 1994, Continuous Univariate Distributions, Volume
(6) Seo, H.S. and Kwak, B.M., 2002, "Efficient Statistical Tolerance Analysis for General Distributions Using Three-Point Information," International Journal of Production Research, Vol. 40, No. 4, pp. 931-944 (7) Lee, S.H., and Kwak, B.M., 2005, "Reliability-Based
Design Optimization Using Response Surface Augmented Moment Method," Proceedings of the 6th world Congress on Structural and Multidisciplinary Optimization, Reo de Janeiro, 30 May-3 June, 2005 (8) Rahman, S. and Xu, H., 2004, "A Univariate
Dimension-Reduction Method for Multi-Dimensional Integration in Stochastic Mechanics," Probabilistic Engineering Mechanics, Vol. 19, No. 4, pp. 393-408 (9) Youn, B.D., Xi,Z., Wells, L.J., and Wang, P. 2006,
"Enhanced Dimension-Reduction(eDR) Method for Sensitivity-Free Uncertainty Quantification, " 11th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, 6-8 September 2006, Portsmouth, Virginia.
(10) Jung, J. J., 2007, "Multiplicative Decomposition Method for Accurate Moment-Based Reliability Analysis, " Ph.D. thesis, The Hanyang University
(11) Sacks, J., Welch, W.J., Mitchell, T,J., and Wynn, H.P., 1989, "Design and Analysis of Computer Experiments, " Statistical Science, Vol. 4, No. 4, pp.
409-435