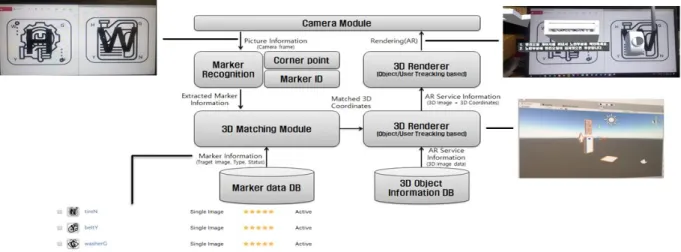
Multi-Marker Augmented Reality System using Marker-Based Tracking with Vuforia
1)
전체 글
1)
수치

관련 문서
We propose two schemes to improve the reality of augmented reality, one is people occlusion, the other is to reduce the dependence of virtual objects on the
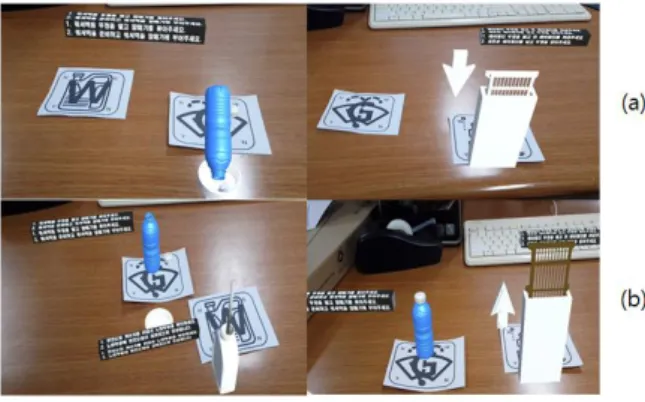
In addition, the proposed system can provide the functions of writing, reading, and deleting a message note that stores the travel information based on the augmented reality if
This research proposes a physics-based deformation technique using AR (Augmented Reality) environments to enhance user immersion and the effectiveness of the deformation.. In
In this study, we have designed the first lesson (“Earth and Moon”) of 5th graders' science with augmented reality combined system so that we could deal with
The proposed method improves user’s participation and interest by using real space, augmented reality space, and virtual reality space all together.. According to the proposed
ARQuake: An outdoor/indoor augmented reality first person application.. in Fourth International Symposium
In order to solve these problems, the adaptive threshold technique is adopted to extract a marker region and a corner extraction method based on line
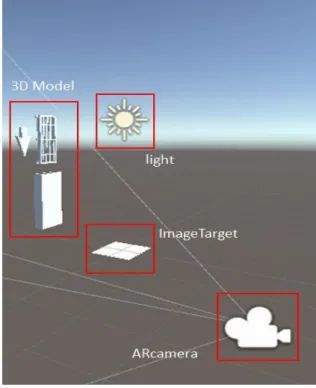
It explains how to create an augmented reality game using Unity engine, which is one of the most used game engines in game development.. We describe a method
