http://dx.doi.org/10.7839/ksfc.2018.15.2.022
재난 대응용 유압 주행 시스템의 해석적 접근을 통한 설계 타당성 검토 Design feasibility study by analytical approach for a disaster
response hydraulic driving system
이근호
1․노대경
2․이대희
1․박성수
1․장주섭
1*Geun Ho Lee, Dae Kyung Noh, Dae hee Lee, Sung su Park and Ju Sup Jang
Received: 2 Feb. 2018, Accepted: 19 Apr. 2018
Key Words:Independent drive(독립 구동), Hydraulic System(유압 시스템), Complex Work(복합동작), Analysis Model(해석 모델), Verification Of Design Feasibility(설계 타당성 검토)
Abstract: This study deals with verifying the design feasibility, of an independently driving hydraulic system for disaster response purposes, through an analytical approach. The development target is a system in which four traveling motors are driven independently, and must be easy to operate even under conditions in which different loads are applied to the traveling motors. In order to be suitable for complex work, the hydraulic system was designed using the main control valve with a pressure compensation function. If we can develop an analytical model that reflects the specifications and functions of the parts through the analysis program, we can verify the validity of the design before we make the prototype. The purpose of this study therefore, is to verify the feasibility of designing an independent drive hydraulic system through the development of an analysis model from the viewpoint of complex work. The analysis program uses Simulation X.
* Corresponding author: [email protected]
1 Department of Mechanical Engineering, Gachon University, Seongnam 13120, Korea
2 Daegu, Gyeongbuk Branch, Korea Institute of Science and Technology Information, Daegu 41515, Korea
Copyright Ⓒ 2018, KSFC
This is an Open-Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License(http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
기호 설명
: Bulk modulus, N/m
2
: Port Volume of control piston, m
3
: Motor displacement per rev, cm
3/rev
∆
: Motor in·outlet pressure drop, N/m
2
: Load on working shaft, N-m : Reduction Gear ratio
: coefficient of friction, Nms/rad
: reduced value of moment, Nms
2/rad
: Leakage coefficient of motor, m
5/Ns
: Flow coefficient
: Flow through main control valve, m
3/s
1. 서 론
대한민국의 국적을 가진 사람이라면 재난·재해로 부터 자신 또는 누군가가 위험에 처할 경우 119에 신고를 할 것이다. 그러나 신고를 받고 출동한 소방 관들은 인력과 기초적인 수작업 도구에만 의존하여 인명구조 및 복구지원에 어려움을 겪고 있는 실정이 다.
1)본 연구는 이러한 어려움을 극복하기 위한 장비 개발의 일환으로, 재난 대응을 위한 4륜 독립구동 유 압 주행시스템 개발에 관한 내용을 다룬다.
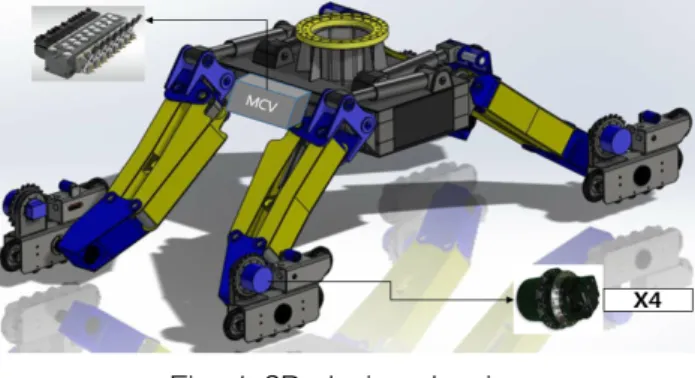
개발 대상은 Fig. 1과 같이 4개의 주행모터가 장착
되어 독립적으로 구동되는 주행 시스템이며, 실제 구
조현장에서의 험지주행을 고려해야만 했다. 험지주행
을 하게 되면 4개의 주행모터에 부하가 각각 다르게
작용하는 악조건이 적용되어 차체가 불안정한 주행 또는 갑작스런 선회를 할 수 있다. 그럼에도 불구하 고 조작자의 의지에 따라 1차적으로 직진 주행상태 에 대한 안정성을 확보하기 위해 압력보상 기능이 포함된 메인 컨트롤 밸브(Main control valve)를 주축 으로 유압회로를 설계하였다.
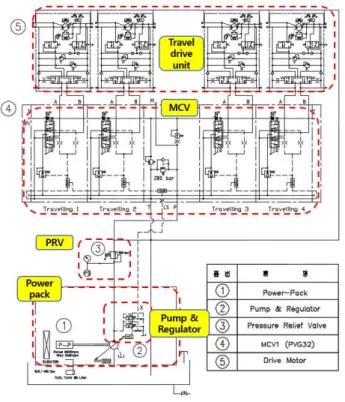
2)유압회로는 Fig. 2에 서 확인 할 수 있으며, 본 논문에서는 주행모터가 복 합적으로 구동될 때의 주행 동조 상태를
“복합 동작 성
”이라고 정의하였다.
또한 주행시스템은 센터 프레임 샤시 상부와 주행 모터를 잇는 다리 측에 실린더를 8개 장착하고 있다.
실린더는 하부체의 상하 수평조절을 자동으로 할 수 있도록 제어시스템과 함께 설계 진행 중이며 이는 주행체가 일반적인 상황에서는 수평이 유지됨을 의 미한다. 상하 수평조절 제어 시스템의 적용을 제외하 고 순수 유압 주행시스템에서의 복합동작성의 안정 성에 대해서 확인할 필요가 있었다.
일반적으로 이러한 중장비 개념의 장비개발은 시 제품을 여러 대 제작하여 설계의도대로 동작하는지 에 대하여 다양한 시험을 한다. 시제품의 제작은 개 발비와 소요시간의 많은 부분을 차지하고 있는데, 해 당 연구과제에서는 완성품 제작 이전까지 총 2개의 시제품 제작이 계획되어 있다.
3)현재 재난 대응용 특수목적기계는 국제적으로도 개발 및 보급이 초기단계이고 국내에서는 근래에 들 어서야 국민안전, 소방안전 및 재난환경 극복용 특수 목적기계 로봇 등에 대한 연구 수행이 증가되는 추 세이다. 즉, 개발 선행사례가 미비하고 개발도 초기 단계이다 보니 설계상의 문제점 예측, 경량화 및 성 능 개선 등을 위한 부품 변경 등이 반복될 가능성이 높다고 볼 수 있다. 이를 위해 성능예측이 가능한 시 뮬레이션 환경구축이 필요하며, 구축이 된다면 설계 사항이나 부품을 변경한다고 해도 시스템의 전반적 인 특성을 해석결과로서 확인 할 수 있기 때문에 시 행착오의 횟수를 줄일 수 있다.
그러므로 저자는 독립구동 유압 주행시스템의 시 제품을 제작하기 이전에 앞서 유압회로와 회로 내에 구성된 부품의 사양과 기능을 반영한 해석 모델을 개발 하게 된다면 설계의 타당성을 검증하여 비용과 시간 측면에서 매우 큰 절감 효과를 볼 수 있다고 생 각하였고 이를 논문의 주제로 선정하였다.
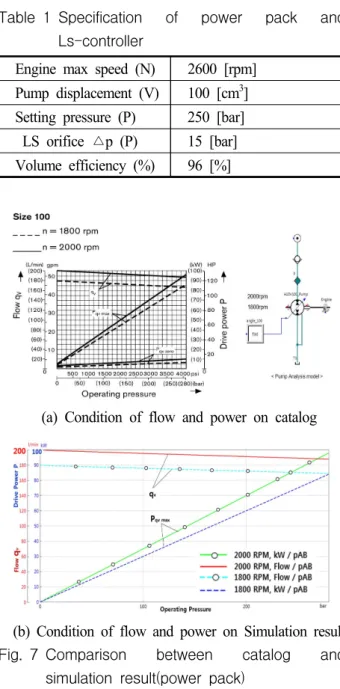
해석에 사용된 소프트웨어는 독일 ITI사에서 개발 된 Simulation X이다. 이 소프트웨어는 유압해석에 특 화되어있는 프로그램이며, 카탈로그의 사양이나 성능
데이터를 기준으로 유압시스템의 설계를 검증, 분석 하는데 널리 활용되고 있으므로 본 연구에 적용하였 다.
4-5)본 연구의 진행과정을 정리하면 다음과 같다. 첫 째, 재난 환경 즉 험지에 적용할 수 있도록 복합동작 성의 안정성을 위한 관점에서 설계한 유압 주행 시 스템을 분석하여 시뮬레이션 환경 상에 모델링한다.
두 번째, 시제품 제작 직후 공차상태에서의 무부하조 건 시험결과를 모델의 해석결과와 비교 및 분석하여 해석모델의 신뢰성을 검증한다. 마지막으로는 해석모 델에 부하조건을 적용시킨 후 주행속도를 분석하여 복합동작성의 안정성을 만족시킨다는 것을 확인하며 설계가 타당함을 검증한다.
2. 유압 시스템 설계
4륜 독립구동 유압 주행 시스템은 Fig. 2와 같이 크게 압력보상기능이 포함된 메인 컨트롤 밸브를 주 축으로 파워팩, 압력 릴리프 밸브, 부하감응 제어기, 주행 모터로 구성되어있다.
본 장에서는 해석모델을 개발하기 이전에 유압 회 로 구성요소들의 기능 및 관련 식을 설명하였다. 관 련 식들은 3장에서 행해지는 해석모델 개발과정에 올바른 모델링 관점을 적용하기 위한 기초 작업이라 고 볼 수 있다.
Fig. 1 3D design drawing
2.1 파워팩 및 부하감응 제어기
파워팩이란, 엔진과 주변기기를 포함한 동력 장치
이다. 구성요소 별로 크게 유압펌프, 엔진, 탱크로 구
분할 수 있다. 유압펌프는 사판식 피스톤 펌프를 사
용하며, 펌프의 회전부가 엔진과 직렬로 연결되어 축
동력 전달과 함께 피스톤의 왕복운동으로 흡입·토출
과정을 반복한다. 부하 감응 제어기는 크게 압력제어
밸브(PCV)와 유량제어밸브(FCV)로 구성되어 있다.
도면에 나와 있지는 않지만 FCV측에는 X포트가 존 재하며 이 연결유로에는 고정오리피스가 존재한다.
액추에이터라인에서 받는 부하의 압력강하가 발생한 압력은 FCV의 스프링 챔버에 전달된다.
Fig. 2 Entire design schematic of 4-Wheel Independent driving hydraulic system
이러한 압력전달로 부하의 크기에 따라 FCV 스풀 의 변위가 조정된다. FCV 스풀의 변위 조정으로 경 전각 포트로 전달되는 압력, 유량이 증가 또는 감소 를 반복하고 전달된 압력, 유량은 경전각 제어기 피 스톤으로 들어가 사판의 각도를 조정한다. PCV는 최 대설정압력을 제한하며 만약 PCV의 스풀이 최대변 위로 절환되면 그때는 사판의 각도가 “0”이 되게 만 든다. 즉, LS 레귤레이터는 이러한 메카니즘을 통해 유압 액추에이터의 구동에 필요한 만큼만 압력과 유 량만을 공급함으로써 에너지 손실을 최소화 시킬 수 있다.
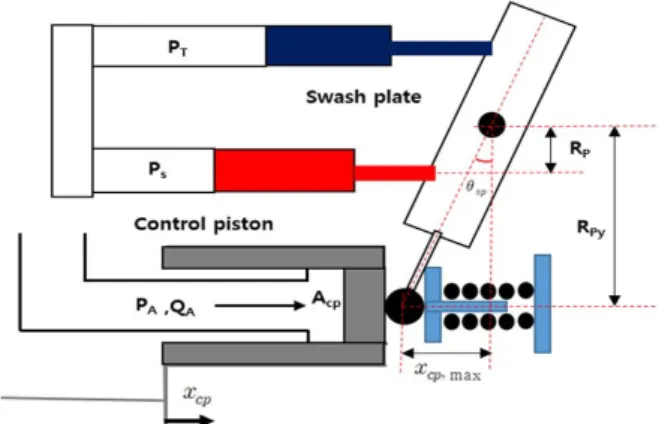
6-7)Fig. 3은 부하감응제어기 도면의 일부이며, 사판각 제어기 피스톤의 배럴 포트(Pr2)로 전달되는 압력, 유 량을 국부적인 검사체적을 설정하여 나타내었다. 따 라서 압력
는 식(1)과 같다.
(1)
Fig. 4는 사판식 펌프의 개략도이며, Pr2포트로 들 어오는 압력
가 요크의 변위를 조정할 때 스와시 플레이트 각도
와 요크 변위
사이의 관계를 나 타내면 식(2)와 같다.
tan
max
(2)
펌프 1회전당의 배제용적 은 식(3)과 같이 표시 된다.
tan
(3) z는 피스톤의 수, 는 피스톤의 단면적이다.
2.2 주행모터(Travel drive unit)
독립구동 유압 주행시스템은 4개의 주행모터가 독립적으로 구동되며, 주행모터가 각 크롤러 내에 서 구동토크를 전달함으로써 주행시스템이 운전될 수 있다.
8)Fig. 5와 함께 일반적인 유압모터의 관성부하만 을 갖는 방정식이 아닌 실제 유압모터의 부하와 감속 기어를 통한 출력축의 부하와 관계된 방정식 을 도출하였다. 유압모터의 입·출력축에 대한 토크
와
는 식(4), 식(5) 그리고 유량
은 식(6) 같다. 식(6)에서
는 공급압력,
은 모터 의 배제용적이며
는 식(7)과 같다. 즉, 모터의 입 출구단 관로의 체적을 합한 것을 체적탄성계수로 나눈 값과 같다. 또한 은 유압 모터 입력축의 회전 각도이다.
Fig. 3 Schematic drawing & control volume of LS
Regulator
Fig. 4 Schematic illustration of swash plate pump
Fig. 5 Schematic illustration of hydraulic motor
∆
(4)
∙
×
(5)
(6)