초고속자기부상열차 절대위치검지시스템 인식구조 설계 및 분석
The Design and Analysis of Recognition Structure for Absolute Train Positioning System of High-speed Maglev Train System
신경호
†
·신덕호1
·이재호1
·이강미1
Kyung-Ho Shin·Ducko Shin·Jae-Ho Lee·Kang-Mi Lee
1. 서 론
자기부상열차는열차가선로를부상하여운행하기때문에 기존차륜철도방식에서적용중인궤도회로
,
타코메터등의 열차위치,
속도검지장치의적용이불가능하므로새로운방식의열차위치및속도검지장치의적용이 필요하다
[6].
현재자기부상열차시스템에적용하고있는다양한위치검지기 술은크게불연속적으로열차위치를파악하는절대위치검지 기술과연속적으로열차위치를파악하는상대위치검지기술 로구분되며
,
대부분의자기부상열차시스템에서는절대위치 검지기술과상대위치검지기술을통합하여적용하고있다[1,2].
여기서절대위치정보는상대위치정보에 의해누적된위치 오차를보정하고
,
열차방호를위한바이탈한정보로사용되 는안전필수의중요정보이다[1].
본논문에서는대표적인초 고속자기부상열차인독일Transrapid
에적용된절대위치검지 기술의수치모델을해석하고, Transrapid
에적용된절대위치검지장치와유사한구조를가지는절대위치검지장치의구조 모델을설계하고시뮬레이션하여설계한구조의적합성을검 증하고 최적의 절대위치검지장치 구조를 제안한다
.
2. 초고속자기부상열차 위치검지기술
Transrapid
는 지상1
차측LSM(Linear Synchronous Motor)
추진방식이적용된독일의초고속자기부상열차시스템으로현
재 중국상하이에약
30km
길이의상용화노선이구축되어운영 중에있다
. Transrapid
는상전도흡인방식의부상시스템이 적용되었으며
, HMB2
모델을 시작으로TR05, TR06,
TR07, TR08, TR09
의 순서로다양한모델의차량이개발되어왔다
[3]. TR06
및TR07
에적용된위치검지장치로는INPO
와
INKREFA
가있다. INPO
는일본의초고속자기부상열차시스템인
MLU
에 적용된위치검지방식과 유사한교차유도 선에의한열차검지방식으로선로에교차유도루프를설치 하여 지상에서연속적으로열차의 위치를검지하는시스템 으로지상추진제어장치와직접적으로인터페이스되어있다. INPO
의 위치 정밀도는±8
o(12mm)
수준이다[1].
하지만INPO
는 정밀한위치검지를위해모든선로에교차유도선의정교한설치가요구되어 설치와유지보수에많은비용이발 생하는문제로인해상하이상용노선의열차모델인
TR08
과최신모델인
TR09
에서는INPO
와같은지상위치검지방식을적용하지않고있으며
INPO
를대신하여차량에서지상선로의
stator
톱니개수를측정하여열차위치를검지하는새로운차상기반의상대위치검지장치가적용되었다
[3]. Transrapid
에적용된또 하나의위치검지장치인
INKREFA
는 불연속으로Abstract For the train positioning system currently applied in high-speed MAGLEV train systems, it is classified into absolute positioning systems which discontinuously detect train positions, and relative positioning systems which continu- ously detect train positions. In this paper we analyze the configuration model and the numerical model of the absolute posi- tioning system applied in TRANSRAPID which is a representative high-speed MAGLEV train, and design the two configuration models specific to the recognition structures of absolute positioning systems. We also verify the compatibility of the design models of absolute positioning system through simulation using MATLAB and propose the optimal configu- ration model of absolute positioning systems for high-speed MAGLEV train system.
Keywords : Highspeed Maglev, Absolute Positioning, Recognition Structure, Simulation
초 록 현재 초고속 자기부상열차시스템에 적용하고 있는 위치검지기술은 불연속적으로열차위치를 파악하는 절대위치검지기술과 연속적으로 열차의 위치를 파악하는 상대위치검지기술로 구분된다
.
본 논문에서는 대표적 인 초고속자기부상열차인 독일Transrapid
에 적용된 절대위치검지장치의구조와 수치모델을 분석하고, Transrapid
에 적용된 절대위치검지장치와 유사한 구조를 가지는 절대위치검지장치의 인식구조별 모델을 설계하고 시뮬레 이션을 통해 설계한 모델의 적합성을 검증하고 최적의 절대위치검지장치 구조를 제안한다
.
주요어 : 초고속자기부상열차
,
절대위치,
인식구조,
시뮬레이션†
교신저자 : 한국철도기술연구원 열차제어통신연구실 E-mail : [email protected]
1
한국철도기술연구원 열차제어통신연구실
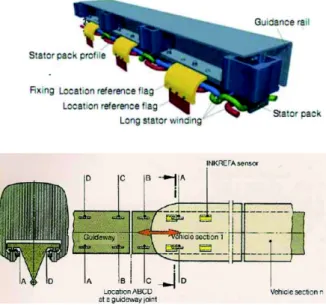
열차위치를정밀하게검지하는절대위치검지장치로서일정 한 간격으로 선로하단에 특정한 비트정보가 각인된
LRL (Location Reference Lug)
을 설치하고,
열차가LRL
을통과할때 열차에설치된센서가
LRL
비트정보를판독하는방식으로 열차위치의 확인이 가능하다
.
차량센서는차량의전두부에총
4
개가설치되는 여분구조를 가지며
, 1
개LRL
은4bit
정보를 포함하고있어,
복수의LRL
을그룹화하여사용하면기준위치정보의확장이가능하다
[1]. INKREFA
를통해얻어진위치정보는열차방호및열차위치보정을위해이용된다
.
따라서열차에서직접측정 된 절대및상대 열차위치정보는38GHz
무선통신을통해 지상제어설비에전달되어추진제어 및운영제어를위해 사 용된다[3].
Fig. 1
Transrapid INKREFA absolute positioning system
3. 초고속자기부상열차 절대위치검지기술 분석3.1 Transrapid 절대위치검지시스템 검지원리
Transrapid
에적용중인절대위치검지시스템인INKREFA
에대한상세 사양은알 수 없지만 앞서분석된
INKREFA
의동작원리를통해절대위치검지시스템의구조분석이가능하 다
.
아래의Fig. 2
는INKREFA
를 구성하는LRL
과 차량 센서의구조를나타낸다
. LRL
은 고유의특정비트정보를표현하기위하여전도성물질이비트정보에 따라각인되어 있
는 구조를가진다
.
아래Fig. 2
에서보는바와같이LRL
에도전체인구리를입히고 여기에비트코드를표시하는 슬롯
(slot)
을에칭(etching)
한 구조로되어있다.
즉 에칭된슬롯의위치에따라
“0”
또는“1”
의이진코드로해석되며,
기준위치의좌측에슬롯이존재하면
bit
는“1”
이되며,
우측에슬롯이존재하면
bit
는“0”
으로해석된다.
차량센서는송신및 수신코일10
쌍으로구성된U
형 구조를가지며,
송수신코일 모두공통적으로중심부2
개의코일과외곽부8
개의코일이서로상이한형상으로되어져있다
[1].
중심부코일과외곽부코일의역할은정확하게확인되어있지못한상태이며
,
각코일구성부의역할에따라절대위치표지판의인식방식이 서로 상이하므로일괄인식또는 연속적인순차인식의형태 로 해석할 수 있다
.
Fig. 2
The Layout of LRL and vehicle sensor coils
3.2 수치모델 분석
U
형센서의송신코일과 수신코일은서로마주보고있는각 코일과한쌍을이루게 되며
,
송신코일로부터방사된고 주파신호는수신코일에자기장을일으키게되고,
전자기유도원리에의해서수신코일에는유도전압이발생한다
.
하지 만 송신코일과수신코일 사이에LRL
이존재하게 되면수신코일에 발생된자기장이변하여 유도전압의크기도변하게 된다
.
이러한전자기유도원리는수신코일의한지점에서유도된 자기장의크기를 계산하는비오사바르의 법칙
(Biot- Savart's Law)
으로표현이가능하며아래의Fig. 3
과같이송신코일과수신코일의구조적인관계가성립하면
z
축을따라 유도되는자기력은송신코일에서의자기력의합으로계산이 가능하다[4].
Fig. 3
The relation between transmitting and receiving coils
송신코일에의한수신코일상의임의의위치
P(x,y,z)
에서유도되는자기력은 아래의식
(1)
과같이송신코일의각 변(OA, AB, BC, CO)
에의해유도되는자기력의합으로표현 된다.
(1)
(2)
(3)
(4)
(5)
여기서
,
BOA,
BAB,
BBC,
BCO는각각z축을따라OA,
AB,
BC,
CO성분에의해유도된자기장을나타내며a
,
b는OA,
AB,
BC
,
CO의폭을,
I는송신코일에인가되는전류의크기를나 타낸다.
또한 µ는 자유공간의 투자율(permeability of free space)
을 나타내며, 4
π× 10
-7(T.m/A)
의 값을 가진다.
이때 I= 2A,
a= 50mm,
b= 50mm,
z= 50mm
라고가정하면,
아래Fig. 4
와같이수신코일에서의유도된자기장의분포도를얻을 수 있다
.
Fig. 4
The Magnetic inductions in receiving coil
상기식
(1)
에 따라유도된자기장은 송수신코일의크기와코일간의간격에따라상이한특성을가지며
,
아래Table
1
은송수신 코일의크기변화및송수신 코일간의간격변화에 따라발생되는유도자기장의특징을보여준다
.
시뮬레 이션 결과와같이 송수신코일의크기가크면클수록유도 자기장의크기가커지는특징을보이며,
크기가작을수록유 도자기장의크기가작아지는특징을보인다.
또한송수신코 일간의간격이커질수록유도자기장의크기는작아지며,
간 격이 작을수록유도자기장의크기가 증가하는특징을보인 다.
따라서고속이동환경에서도안정적인유도자기장을얻 기 위해서는송수신코일의크기를증대시키고,
송신코일과 수신코일간의 간격을 조밀하게 설계할 필요가 있다.
3.3 절대위치검지장치 구조분석
INKREFA
센서는U
형의구조로크기가다른2
가지종류의 총
10
개의송신및 수신부채널 쌍으로구성되어있기때 문에U
형센서내2
종류의송수신채널의역할에따라일괄인식방식과순차인식방식으로해석할수있다
[5,6].
일괄인식방식은
Fig. 5
의좌측과같은인식구조를가진다.
즉, P1~P4
의
4
개 센서채널은비트정보확인용으로D0
채널은비트정 보확인신호동기용으로사용되는방식으로D0
채널이도전성 물질을만나수신신호값이
0
이 되었을때P1~P4
채널을 동시에읽어들여
LRL
비트정보를판독하는방식이다.
순차인식방식은
Fig. 5
의우측과같은 인식구조를가지며N1~N4
의4
개 센서채널을신호동기용으로, D1
이 비트정보를 판독하는센서채널로이용된다
.
따라서N4, N3, N2, N1
의 순서로각센서채널이
LRL
의도전성물질을만나수신신호값이임계값에도달했을때비트정보판독용동기신호
를 발생하면
, D1
채널이 순차적으로1
비트씩LRL
비트정보를 인식하여 절대위치를 판독하게 된다
.
4. 인식구조 시뮬레이션 모델 설계 및 검증
4.1 신호발생기 설계
신호발생기는
LRL
과 송수신코일간의상호관계를통해U
형 센서에서계측되는신호를모사하는역할을한다
.
본논문에서는신호발생기설계를위해
LRL
구조와센서구조를아 래Fig. 6
과같이단순화하여적용한다. LRL
은 총4bit
의코드정보를포함하며
,
각기준선간격이0.2m
씩떨어져있으며,
총1m
길이의구조를 갖는다.
센서모델은5
채널의각 센서코일이 기준선간격과동일한 간격으로배치되도록가정하였 다
. Fig. 6
의LRL
은1101
비트코드의설정예를나타낸다.
B
z= B
OA+ B
AB+ B
BC+ B
COB
OAµ
0Iy
4π y (
2+ z
2)
( )
--- x x
2+ + y
2z
2--- ( a x – ) a x –
( )
2+ + y
2z
2---
⎝ + ⎠
⎜ ⎟
⎛ ⎞
⋅
=
B
ABµ
0I a x ( – ) 4π a x ( ( – )
2+ z
2)
( )
---⋅
=
y a x –
( )
2+ + y
2z
2--- ( b y – ) a x –
( )
2+ ( b y – )
2+ z
2---
⎝ + ⎠
⎜ ⎟
⎛ ⎞
B
BCµ
0I b y ( – ) 4π b y ( ( – )
2+ z
2)
( )
--- ⋅
=
x x
2+ ( b y – )
2+ z
2--- ( a x – ) a x –
( )
2+ ( b y – )
2+ z
2---
⎝ + ⎠
⎜ ⎟
⎛ ⎞
B
COµ
0Ix
4π x (
2+ z
2)
( )
--- y x
2+ + y
2z
2--- ( b y – ) x
2+ ( b y – )
2+ z
2---
⎝ + ⎠
⎜ ⎟
⎛ ⎞
⋅
=
Table 1
The electromagnetic induction characteristic for coils dimensions and gaps
a, b 50mm 50mm 50mm 100mm 25mm
z 50mm 100mm 25mm 50mm 50mm
Magnetic Field B = 5.23×10-6 T(Max) B = 0.89×10-6 T(Max) B = 18.48×10-6 T(Max) B = 9.23×10-6 T(Max) B = 1.77×10-6 T(Max) Characteristic Ref Coils Gap↑
Magnetic Field↓
Coils Gap↓
Magnetic Field↑
Coils Dimension↑
Magnetic Field↑
Coils Dimension↓
Magnetic Field↓
본시뮬레이션에서 구현한신호발생기는열차의이동 속 도
,
비트코드와채널및LRL
의 구조(
채널별간격)
를입력변 수로하여다양한이동환경및비트코드에대한신호출력이 가능하도록구현하였다.
아래의Fig. 7
은“1101”
비트값을가 지는LRL
의우측방향으로부터 좌측방향으로100m/s
의 속 도로센서가 이동할경우에 대한 각센서 채널별 출력신 호를 나타낸다.
Fig. 7
The output of signal generator simulation
4.2 인식구조별 신호처리모델 설계
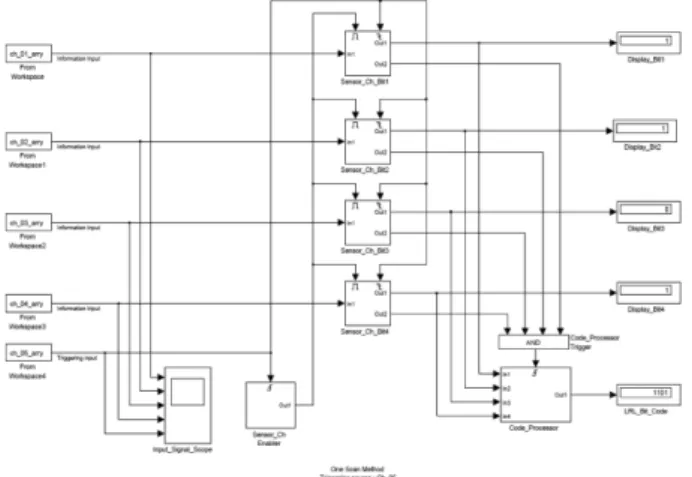
4.2.1 일괄인식방식의 신호처리모델 설계 및 검증 신호발생기로부터생성된특정비트코드의출력신호로부터
비트코드를판독하기위해서는신호처리회로가필요하며
,
일 괄인식방식과순차인식방식의2
가지방식으로구성이가능 하다.
일괄인식방식은4
개의 센서채널을각 비트정보인식 용으로나머지1
개센서채널을비트정보인식을위한신호동 기용으로사용하는방식이다.
일괄인식방식에서는앞에서정 의된5
채널의U
형센서구조에서비트정보인식용채널로Ch1
~ Ch4
를설정하고신호동기용채널로Ch5
를 설정한다.
따라서 신호동기용 채널에서동기신호가측정되는 순간
4
개 의 비트정보인식용채널에서각 채널별로해당비트정보를 인식하여LRL
의비트코드를판독한다.
일괄인식방식의신 호처리 구조의 모델링을 위하여 수치연산 소프트웨어인Matlab Simulink
를 이용하였으며,
구현된일괄인식구조모델은 아래의
Fig. 8
과 같다.
Fig. 8
에서Sensor_Ch_Bit
는각 채널별LRL
비트정보인 식로직으로Ch5
로부터동기신호입력이확인되면Ch1~Ch4
의비트정보를인식하며
,
판독된LRL
비트코드는LRL_Bit_
Code
창에 표출된다.
Fig. 8
The design structure for one-shot recognition
일괄인식구조모델에대한검증은
Fig. 7
의 신호발생기를사용하여 검증이가능하다
.
즉,
입력된LRL
비트코드와일괄인식구조를통해판독된비트코드가동일함을확인하는방 법으로검증이가능하며
,
본논문에서는Matlab
시뮬레이션 Fig. 5The comparison for recognition methods(one-shot vs. sequential)
Fig. 6
The structures of LRL and sensor coils for signal generator
simulation
을 통해
LRL
비트코드의입력값(1101)
과 판독된 값(1101)
이 동일함을 확인하여 검증하였다
.
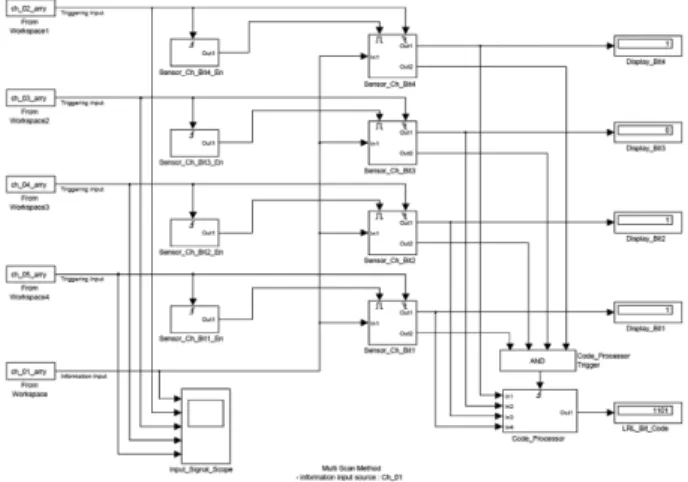
4.2.2 순차인식방식의 신호처리 시뮬레이션 모델 앞서정의된일괄인식방식과달리
,
순차인식방식은Ch1
을 비트정보인식용으로 사용하며,
나머지4
개의 센서채널인Ch2~Ch5
을비트정보인식을위한 신호동기용으로사용하는방식이다
.
즉,
순차인식방식에서는Ch1
로부터입력되는비트코드신호를
Ch2~Ch5
에서순차적으로얻어진4
개의동기신호에맞추어
LRL
비트정보를판독한다.
순차인식구조모델은
Fig. 9
와같이Matlab Simulink
로모델링하였으며,
여 기서입력채널Ch1
은비트정보인식로직인Sensor_Ch_Bit1
~ Sensor_Ch_Bit4
의 입력신호로동시에 전송되어 각비트별정보가 인식되며
, Ch2~Ch5
의신호입력은 비트정보인식로직에 대한각각의동기신호로 이용되는구조를 가진다
.
순차인식구조모델에대한검증은일괄인식구조모델의검 증방법과동일한방법으로검증하였으며
, LRL
비트코드의입력값
(1101)
과판독된값(1101)
이동일함을 확인하였다.
하지만순차인식방식은일괄인식방식과비교하여인식로직
Sensor_Ch_Bit1 ~ Sensor_Ch_Bit4
의 인식동작을순차적으로제어하기위하여
4
개의Enabler(Sensor_Ch_Bit_En)
가추 가로필요하고,
순차적인비트정보의인식과동시에기존에인식한비트정보의저장이부가적으로처리되어야함으로논 리회로의 복잡성이 증가하는 단점이 확인되었다
.
Fig. 9
The design structure for sequential recognition
5. 결 론초고속자기부상열차에서절대위치검지정보는열차운행에 따라누적된열차위치오차를보정하고
,
열차방호를위해반 드시필요한안전필수정보이다.
본논문에서는초고속자기부상열차인
transrapid
에적용중인절대위치검지기술의검 지원리와수치모델을분석하여 위치검지성능개선을 위한LRL
과 센서간의구조관계를해석하였다.
또한transrapid
에 적용된절대위치검지장치와유사한구조를가지는절대위치 검지장치의인괄인식구조모델과순차인식구조모델을설계 하고,
시뮬레이션하여설계한2
가지구조모델의적합성을확 인하였다.
일괄인식방식은하나의센서채널을비트코드 정보인식을 위한동기신호용으로사용하는방식으로비교적단순한신 호처리구조로구현이가능한장점이있다
.
순차인식방식은 하나의센서채널을비트코드정보인식용으로사용하고 나머 지4
개의센서채널을정보인식을위한동기신호용으로 사용 하는방식으로일괄인식방식에비해다소복잡한구조를가진다
.
따라서400km/h
이상의초고속으로운행되는초고속자기부상열차에서더욱정밀한절대위치검지를위해서는초 고속자기부상열차가 절대위치검지지점을통과할때신속한 신호처리가필수적이므로단순한신호처리구조를가지는일 괄인식구조모델의적용이적합하다
.
또한일괄인식구조모 델에서더욱정밀한절대위치검지를위해서는동기신호의타 이밍이 매우중요한요소이므로 동기신호용센서채널의코 일 폭을좁게설계하여동기신호의타이밍정확성을향상시 킬 필요가 있다.
감사의 글
본연구는
2010
년도지식경제부기술료사업의일환으로수행되었습니다
.
참고문헌
[1] K. Heinrich (1989)
Transrapid Maglev System
, Hestra-Verlag, pp.69-70.
[2] Kazumasa Morishita(2006) Novel train position detecting sys- tem in the Yamanashi Maglev Test Line,
Maglev2006 .
[3] X.-M
.
Wu (2003)Maglev Train
, Shanghai Science and Tech- nology Press, China.
[4] David K. Cheng (1993)
Fundamentals of Engineering Electro- magnetics
, Addison-Wesley, pp.180-186.
[5] K.H
.
Shin (2009) Study on the Principle of Absolute Train Positioning System for Ultra High Speed Maglev Train,KIEE EMECS 2009
, pp.157-159.
[6] K.H Shin (2009) The Simulation Model Design of Absolute Train Positioning System for High Speed Maglev Train Sys- tem,
2009 Autumn Conference of The Korean Society for Rail- way
, pp. 135.
[6] H.S. Yoon (2005) Estimation of Train Position Using Sensor Fusion Technique,