Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography Vol. 32, No. 6, 563-570, 2014
http://dx.doi.org/10.7848/ksgpc.2014.32.6.563
6DOF Simulation of a Floating Structure Model Using a Single Video
Trieu, Hang Thi1)·Han, Dongyeob2)
Abstract
This paper purposes on stimulating the dynamic behavior of a floating structure model with the image processing and the close-range photogrammetry, instead of the contact sensors. Previously, the movement of structures was presented by the exterior orientation estimation from a single camera following the space resection. The inverse resection yields to 6 orientation parameters of the floating structure, with respect to the camera coordinates system. The single camera solution of interest in applications is characterized by the restriction in terms of costs, unfavorable observation conditions, or synchronization demands when using multiple cameras. This paper discusses the theoretical determinations of camera exterior orientation by using the least squares adjustment, applied of the values from the DLT (Direct Linear Transformation) and the photogrammetric resection. This proposed method is applied to monitor motions of a floating model. The results of 6DOF (Six Degrees of Freedom) from the inverse resection were signified that applying appropriate initial values from DLT in the least square adjustment is effective in obtaining precise exterior orientation parameters.
Therefore, the proposed method can be concluded as an efficient solution to simulate movements of the floating structure.
Keywords : Floating Structure, 6DOF, Space Resection, Tracking, Displacement, DLT
563 ISSN 1598-4850(Print) ISSN 2288-260X(Online) Original article
Received 2014. 07. 10, Revised 2014. 08. 04, Accepted 2014. 09. 29
1) Member, Dept. of Civil and Environmental Engineering, Chonnam National University (E-mail: [email protected])
2) Corresponding Author, Member, Dept. of Civil and Environmental Engineering, Chonnam National University (E-mail: [email protected])
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-Commercial License (http://
creativecommons.org/licenses/by-nc/3.0) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
1. Introduction
There are two methods generally used to measure the displacement or vibration of structures: the contact type, and the non-contact type. For the contact type, the mode requires mounting of sensors to a rigid body to acquire the motion signal, but this is always challenging in field tests.
Meanwhile, the non-contact method requires relatively expensive devices, and in many cases has a limited measurement distance (Lee and Rhee, 2013).
Photogrammetry is a technology for measuring 2D or 3D shapes from photos. Golparvar-Fard et al. (2011) successfully researched “structure from motion,” by
implementing an image processing technique, that of based on the point cloud application. In this approach, however, the model object must be in stationary status during the process, so it is not suitable for modeling a moving object in real time. With the subject of measuring the movement of an object, Jeon et al. (2010) applied image processing to measure the vibrations of a beam with a camera, but the obtained result was limited to 2D measurement, and it was necessary to use a high-speed camera.
The Pure photogrammetric solutions for the object tracking upon the two or more synchronized cameras have advantages on providing the absolute object coordinates of targets. Ozbek et al. (2010) monitored a large wind
Journal of the Korean Society of Surveying, Geodesy, Photogrammetry and Cartography, Vol. 32, No. 6, 563-570, 2014
564
turbine by use of a photogrammetry method that required a PONTOS system, consisting of four CCD (Charge Coupled Device) cameras. Fathi and Brilakis (2013) utilized two video cameras for measuring dimensions of a roof base on the structure following motions with the necessity of matching time stamp of each video frame, recorded from each camera.
The estimation of camera orientation by space resection is a common task in photogrammetry, regarding to the indirect determination of position and orientation parameters. The exterior orientation of a camera with respect to the three-dimensional coordinates system can be obtained by linear or non-linear solutions, based on measurements of image coordinates of reference points.
The linear resection method is based on DLT (Abdel-Aziz and Karara, 1971; Marzan, 1975), or projective geometry (Harley and Zisserman, 2003), while the linear functions require a minimum of six control points, without needs of approximate values of unknown orientation parameters.
In fact, the most accurate solutions are required the use of redundant observations and the least square techniques (Mikhail et al., 2001). The best-known non-linear method is the space resection, which is established upon the least square solution of linearized collinearity equations, so as this method requires a minimum of three reference points, and approximate values for six unknown parameters.
In general, the object tracking is a challenging problem, as well as an important task within the field of a computer vision, especially for applications that require the location or shape of an object in every frame, such as security and surveillance, video communication, traffic management, human-computer interaction, and medical imaging.
The developments of computer science, achieved the availability of high quality and inexpensive video cameras and increased demands for automated video analysis, have generated a great deal of interest in the object movements tracking (Yilmaz et al., 2006). In this research, the problem of automatic video tracking following a moving target of floating object over the video sequence was introduced.
The study mainly purposed on solving the problem for measuring the dynamic behavior of floating structures with an inexpensive video camera. Firstly, the methodology of
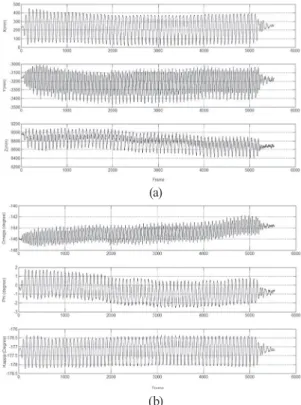
image-based motion measuring was performed in Section 2. At next, the experimental verification to investigate the algorithms and analyses results, obtained from the regular wave test, were shown in Section 3, and then the dynamic motion of floating model was successfully obtained through 6DOF simulation using a single video.
2. Movement Measurement by Using a Video
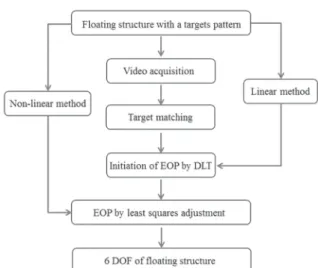
Fig. 1 shows detailed procedures of the proposed method to measure movements of a floating structure with the video in images processing and close-range photogrammetry.
The following approaches were implemented to calculate positions and orientations of the camera, and 6DOF of the structure.
(1) Image processing-based tracking reference points (2) Space resection using DLT
(3) Adjustment using the least squares method (4) 6DOF by inverse resection
2.1. Image processing for tracking of reference points
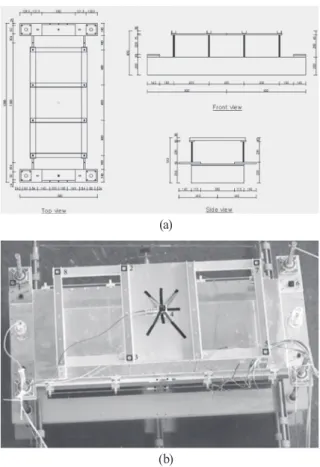
A series of images, obtained from the camera, was conversed its position of interest that allows structure displacement measurements; thus, tracking the target is the main task in this research. Specifically, the floating structure was controlled by a set of points, namely targeted Fig. 1. Movement measurement procedure by a camera