1. Introduction
㧦₆㠊Ⱇ㧊⧖ 㧦㍳㦮 䦷㧎⩻ ⡦⓪ ⩻㦚 㧊㣿䞮㡂 ₆Ἒ㩗 㩧㽟㧊 㠜⓪ ㌗䌲⪲ 㿫㦚 㰖㰖䞮
⓪ 㠊Ⱇ㦚 Ⱖ䞲┺ 㧦₆㠊Ⱇ㦖 㧦₆㌗₆㑶 . 㦚 㧊㣿䞲゚㩧㽟 ゚㥺䢲 㠊Ⱇ㧊₆ ➢ⶎ㠦 Ⱎ ࠎ , 㺆 Ⱎ⳾㠜㧊 ἶ㏣ 䣢㩚㧊 Ṗ⓻䞮ἶ ₾⊭䞮Ợ ㌂㣿 ࠎ 䞶 㑮 㧞⓪ 䂲䢮ἓ㩗㧎 㧻㩦㦚 Ṗ㰖ἶ 㧞┺ ⡦䞲 .
⓻☯㩲㠊⯒ 䞶 㑮 㧞₆ ➢ⶎ㠦 㰚☯㦚 䣾ὒ㩗㦒⪲
Ṧ㐶㔲䌂 㑮 㧞┺.
䞮㰖Ⱒ 㧦₆㠊Ⱇ ₆㑶㦚 Ⱔ㦖 ㌆㠛䡚㧻㠦 㩗 㣿䞮⓪◆ 䋆 ⶎ㩲㩦 㭧 䞮⋮Ṗ 㧦₆㠊Ⱇ 㔲㓺䎲 㦮 㔶⬆☚㧊┺ 㧒㩗㧎 ₆Ἒ㔳 㩧㽟 㠊Ⱇ㠦㍲ .
㡞㌗䞶 㑮 㠜⓪ 㧦₆㠊Ⱇ㦮 ἶ㧻㦖 㩚㼊 㔲㓺䎲 㠦 䋆 㡗䟻㦚 㭒Ợ ♲┺ 㧦₆㠊Ⱇ㦮 ἶ㧻 㥶䡫 . 㦒⪲⓪ 㩫㩚 㩚⩻ 㯳䙃₆ ἶ㧻 㥚䂮 ㎒㍲ ἶ㧻 , ,
⁎Ⰲἶ 㩲㠊₆㦮 ἶ㧻㦚 ✺ 㑮 㧞┺ ⳝ ⎚ ☯㞞 . 㧦₆ 㠊Ⱇ 㔲㓺䎲㠦㍲ 㧒㧊 ἶ㧻⋮▪⧒☚
㤦䢲䧞 㧧☯䞮⓪ ἶ㧻 䠞㣿 㧦₆㠊Ⱇ 㔲㓺䎲㠦
╖䞲㡆ῂṖ 㧊⬾㠊㪎 㢪┺.[1,2,3]
㡞⯒ ✺㠊 㩚⩻ 㩫㩚㔲㠦⓪ ⽊㫆 㩚㰖⯒ ㌂㣿 䞮㡂 㩚⩻㦚 Ὃ 䟊 㭒Ệ⋮ 㨂㌳䣢⪲(Regenerative
⯒ 㧊㣿䞮㡂 䣢㩚㼊㦮 㤊☯㠦⍞㰖⯒ 㩚₆㠦 circuit)
⍞㰖⪲ ⼖䢮䞾㦒⪲㖾 ἶ㧻㔲㠦☚ 㞞㩫䞮Ợ 㩚㤦㦚 Ὃ 䟊 㭖┺ 㩲㠊₆ ἶ㧻㦖 㿪Ṗ⪲ Ṳ㦮 㩲㠊₆ . 3
⯒ ㌂㣿䞮㡂 㩲㠊₆✺ ㌂㧊㦮 㿲⩻㦚 ゚ᾦ䞮㡂 ἶ 㧻⋲ 㩲㠊₆⯒ 㺔㞚 㤦⧮╖⪲ 㔲㓺䎲㦚 㞞㩫䞮Ợ 㧧☯㔲䋺Ợ ♲┺ [4]. ⡦䞲Ṗ㧻 䦪䞲䡫䌲㦮 ἶ㧻 㧎 㞷䁚㠦㧊䎆 ἶ㧻㔲㠦⓪ 㡂㦮 㞷䁚㠦㧊䎆⯒
㧊㣿䞲㞷䁚㠦㧊䎆 ἶ㧻䠞㣿 㞢ἶⰂ㯮 [1,2] 㦚 ῂ䡚 䞮㡂 㩲㠊Ṗ Ṗ⓻䞮┺ 㯟 䧮㦚 ㌳䞮⓪ Ṳ㦮 . , 8 䆪㧒㭧 Ṳ㦮 䆪㧒㧊 ἶ㧻⋮▪⧒☚ 䣢㩚㼊⯒ 㰖㰖 3 䞶 㑮 㧞Ợ ♲┺.
⽎ 㡆ῂ㠦㍲⓪ 䎆⽊㧦䗢䝚㣿 ἶ㧻䠞㣿 㧦₆
㠊Ⱇ 㔲㓺䎲㦚 ㍺Ἒ䞮㡖┺ 㧊⻞ 㡆ῂ㠦㍲⓪ 㞷 . 䁚㠦㧊䎆 ἶ㧻ὒ ㎒㍲㦮 ἶ㧻 䠞㣿 㞢ἶⰂ㯮㠦 ╖
䎆⽊㧦䗢䝚㣿 ἶ㧻䠞㣿 㧦₆㠊Ⱇ 㔲㓺䎲 ㍺Ἒ Ṳ
䎆⽊㧦䗢䝚㣿 ἶ㧻䠞㣿 㧦₆㠊Ⱇ 㔲㓺䎲 ㍺Ἒ Ṳ
䎆⽊㧦䗢䝚㣿 ἶ㧻䠞㣿 㧦₆㠊Ⱇ 㔲㓺䎲 ㍺Ἒ Ṳ
䎆⽊㧦䗢䝚㣿 ἶ㧻䠞㣿 㧦₆㠊Ⱇ 㔲㓺䎲 ㍺Ἒ Ṳ
Design and Implementation of a Fault-Tolerant Magnetic Bearing System For Turbo-Molecular Vacuum Pump
Myounggyu Noh, Byungchul Park and Sungrak Cho
Key Words: Magnetic Bearing( 㧦₆㠊Ⱇ ), Inductive Sensor( 㧎▫䕆ぢ ㎒㍲ ), Fault-Tolerance( ἶ 㧻䠞㣿)
Abstract
One of the obstacles for a magnetic bearing to be used in the wide range of industrial applications is the failure modes associated with magnetic bearings, which we don't expect for conventional passive bearings. These failure modes include electric power outage, power amplifier faults, position sensor faults, and the malfunction of controllers. Fault-tolerant magnetic bearing systems have been proposed so that the system can operate in spite of some faults in the system. In this paper, we designed and implemented a fault-tolerant magnetic bearing system for a turbo-molecular vacuum pump. The system can cope with the actuator/amplifier faults as well as the faults in position sensors, which are the two major fault modes in a magnetic bearing system.
ನ 㿿⋾╖䞯ᾦ ╖䞯㤦
E-mail: [email protected]
TEL: (042)821-6877 FAX: (041)821-4919
* 㿿⋾╖䞯ᾦ Ⲫ䃊䔎⪲┟㓺 Ὃ䞯ὒ
** 䞲ῃ㩚⩻㡆ῂ㤦
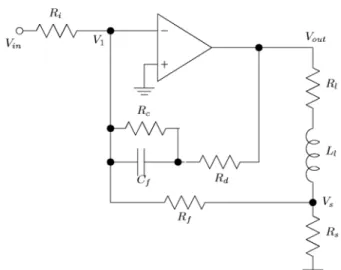
Fig. 3 Sensor signal processing circuit 䟊 ┺⬾㠞┺ 㞷䁚㠦㧊䎆 ἶ㧻䠞㣿㦚 㥚䟊 . Meeker
㢖 Maslen[1] 㧊 㭒㧻䞲 bias linearization ⻫㦚 㧊 㣿䞮㡖┺ ⡦䞲 ㎒㍲ ἶ㧻 䠞㣿 㞢ἶⰂ㯮㦚 㥚䞮㡂 . Ⱇ 䡫䌲㦮 㧎▫䕆ぢ ㎒㍲⯒ 㧊㣿䞮㡖┺ ┺⁏ 䡫䌲 . 㦮 㧎▫䕆ぢ ㎒㍲⓪ ㎒㍲㦮 㭧⽋㎇㦚 㓓Ợ 㠑㦚 㑮 㧞㦒Ⳇ 㩲㧧䞮₆☚ 㓓┺.
㧊⻞ 㡆ῂ㠦㍲ 䎆⽊㧦䗢䝚㦮 㽞₆ ⳾◎㦚 Ⱒ
✺ἶ 4200RPM 㦒⪲ 䣢㩚㔲䋺Ⳋ㍲ 㔺䠮㦚 䞮㡖┺ . 㧦₆㠊Ⱇ 㔲㓺䎲㦖 Ṳ㦮 䆪㧒㭧 Ṳ㦮 䆪㧒㧊 8 3 ἶ㧻⋮Ệ⋮ 䞮⋮㦮 ㎒㍲Ṗ ἶ㧻⋮▪⧒☚ ┺㔲 㤦
㌗䌲 ⪲ 㩲㠊♮㠊 ἶ㧻㠦 ╖゚䞶 㑮 㧞⓪ ἆὒ⯒
㠑㠞┺.
2. System Description
2.1 Turbo-Molecular Vacuum Pump
㦖 䎆⽊㧦䗢䝚㦮 㩚㼊㩗㧎 Ṳ⨋☚⯒ ⽊㡂 Fig. 1
㭒ἶ 㧞┺ ⳾䎆⓪ . BLDC ⳾䎆⯒ ㌂㣿䞮㡂 䣢㩚㔲 䋺ἶ 㧞ἶ Ṳ㦮 ἓ䟻 㠊Ⱇὒ Ṳ㦮 㿫䟻 , 2 1
㠊Ⱇ㠦 㦮䟊 ㌗♮ἶ 㧞┺ ṗṗ㦮 ἓ䟻 . 㠊Ⱇ㦖 ⁏ 䡫䌲㧊ἶ 㧒㩗㦒⪲⓪ Ṳ㦮 䆪㧒㧊 8 2
㍲⪲ 㡆ἆ♮㠊 䞮⋮㦮 䆪㧒 ⁎⭏㦒⪲ ⋮⒮㰖Ⱒ 㞷 䁚㠦㧊䎆 ἶ㧻 䠞㣿㦚 㥚䟊㍲⓪ ⁏ ⳾⚦ ☛Ⱃ㩗 8 㦒⪲ 㩲㠊♮㠊 㭧⽋㎇㦚 㠑㠊㟒 䞲┺ 㔺㩲⪲ 䗢䝚 . 䣢㩚⋶Ṳ㦮 ⶊỢ ➢ⶎ㠦 㥚㴓 ἓ䟻 㠊Ⱇ㦖 㞚⧮㴓 ἓ䟻 㠊Ⱇ⽊┺ 䋆 ῂ㫆⪲ ♮㠊㧞┺.
䗢䝚㦮 㧧☯ 㔲㧧ὒ 㧧☯ 㭧㰖⯒ 㥚䞮㡂 Ṳ㦮 ⽊ 2 㫆 㠊Ⱇ㦚 ㌂㣿䞮㡖ἶ ⪲䎆㢖 ἓ䟻 㠊Ⱇ , 㦮 Ὃ₆Ṛ⁏㦖 0.3mm, ⽊㫆 㠊Ⱇ Ṛ⁏㦖 0.1mm 㧊┺.
2.2 Linear Transconductance Power Amplifier
㠊Ⱇ 䆪㧒㦮 㩚⮮⓪ linear trnasconductance 㠦 㦮䟊 ㌳㎇♮Ợ ♲┺ ⓪ 㩚⩻ 㯳 amplifier . Fig. 2
Fig.1 Schematic diagram of a magnetically levitated turbo-molecular pump
Fig. 2 Schematic of linear transconductance power amplifier
䙃₆㦮 㩚㼊㩗㧎 䣢⪲㦮 ῂ㫆⯒ ⋮䌖⌊ἶ 㧞┺ 䕢 . 㤢 㟆䝚⪲⓪ APEX ㌂㦮 PA21 㦚 ㌂㣿䞮㡖ἶ 䞚㣪 , 䞲 㩚⩻ 㣿⨟㧊 㧧₆ ➢ⶎ㠦 㾲╖ ( 1A) 㩚⮮ 㯳䙃
₆㦮 ゚䣾㥾㎇㦖 ⁎Ⰲ 䋆 ⶎ㩲Ṗ ♮㰖 㞠⓪┺.
2.3 Inductive Sensor
㧊⻞ 㡆ῂ㠦㍲ Ṳ㦮 㧎▫䕆ぢ ㎒㍲Ṗ ㌂㣿♮㠞 2
┺ ṗṗ㦮 ㎒㍲⓪ Ⱇ 䡫䌲㦮 㥶☚䡫 㥚䂮 ㎒㍲⪲ .
ἓ䟻㦮 ⪲䎆㦮 㤖㰗㧚㦚 䁷㩫䞮Ợ ♲┺ [5]. ἶ 㧻 䠞㣿 㞢ἶⰂ㯮㦚 㩗㣿䞮㰖 㞠㦚 ➢⓪ 16 ⁏㦮
㎒㍲Ṗ 㦒⪲ ⋮⒮㠊㪎㍲ 䆪㧒㧊 ṦỾ㰖ἶ Ⱎ 4 㭒⽊ἶ 㧞⓪ Ṳ㦮 䆪㧒 ⁎⭏㦖 ㌗╖㩗㦒⪲ 㿫㦮 2 1
⪲䎆 㤖㰗㧚㦚 ㎒㕇䞮Ợ ♲┺ ㎒㕇 䆪㧒㦖 . 50% 㦮
✖䕆゚⯒ Ṗ㰖⓪ PWM 㓺㥚䃃 㯳䙃₆ 㰧㩗䣢⪲
⪲ ῂ☯♮Ợ ♲┺
(LMD18200) .
㎒㍲ 㔶䢎㦮 㻮Ⰲ 䣢☚⓪ Fig.3 ὒ ṯ㧊 㩚⮮㎒㍲㢖
⽋㫆䞚䎆⪲ ῂ㎇♮㠊 㧞┺ ⽋㫆䞚䎆⓪ ἶ㡃䐋ὒ . 䞚䎆 㩚䕢 㩫⮮₆ 㩖㡃䐋ὒ䞚䎆⪲ 㧊⬾㠊㪎 㧞 , ,
┺ ἶ㡃䐋ὒ䞚䎆㠦㍲⓪ 㥚䂮㩫⽊㢖 ὖἚ㠜⓪ 㩖 .
㭒䕢 㧷㦢㦚 㠜㞶㭒ἶ 㩚䕢 㩫⮮₆㢖 㩖㡃䐋ὒ䞚
䎆㦮 㫆䞿㦖 䆪㧒 㩚⮮㦮 㓺㥚䃃 㧷㦢㦒⪲䎆 㥚
䂮 㩫⽊⯒ 㿪㩫䞲┺.
3. Actuator/Amplifier Fault Tolerance
㧦₆㠊Ⱇ㦮 ἶ㧻㟧㌗ὒ 㩚⮮ 㯳䙃₆㦮 ἶ㧻 㟧㌗㦖 ἆὒ⪶㩗㦒⪲ 㤦䞮⓪ 䆪㧒 㩚⮮⯒ Ⱒ✺㰖 ⴑ䞮⓪ ṯ㦖 ἆὒ⯒ ⋮䌖⌊Ợ ♲┺ ⁎Ⰲἶ 㞷䁚 ډ 㠦㧊䎆 ἶ㧻 䠞㣿㦚 㥚䟊 㿿䞲 䧮㦚 ⌒ 㑮 㧞
⓪ 䆪㧒㦚 ㌂㣿䞶 㑮 㧞㠊㟒 䞮⓪◆ 㧊⓪ 㿿 ڇ 䞲 ㌗⩻㦚 Ṗ㰖₆ 㥚䞾㧊┺ 㧊⻞ 㡆ῂ㠦㍲ ㌂ ډ 㣿♲ ⻫㦖 ڽۄڼێ ۇۄۉۀڼۍۄەڼۏۄۊۉ ⻫㦒⪲ 㧛⩻ ڇ 㩚⮮㢖 㿲⩻ 䧮ὒ㦮 ゚㍶䡫㩗㧎 ὖἚ⯒ ㍶䡫㩗㦒
⪲ ⁒㌂䢪䞮⓪ ⻫㧊┺ډ
㧒㩗㦒⪲ ἓ䟻 㧦₆㠊Ⱇ㦖 䧮㦚 ⌊⓪
㎇㦮 Ṳ㑮⽊┺ ▪ Ⱔ㦖 ⁏㦚 Ṗ㰖Ợ ♲┺ 㡞 ډ
⯒ ✺Ⳋ 㿫 䟻㦒⪲ 䧮㦚 ⌊₆ 㥚䟊 㧒㩗㦒 ڍ
⪲ ⁏ 䡫䌲㦮 ἶ㩫㧦Ṗ ㌂㣿♮Ợ ♲┺ 㧦₆䣢 ړ ډ
⪲ ㍳㦚 䐋䟊 䆪㧒 㩚⮮㠦 㦮䞲 㧦₆⩻㦖 㔳 ὒ 㻮⩒ 䚲䡚♶ 㑮 㧞┺
ڃڌڄ ڃڍڄ ډ
I V I
F
x=
T xڃڌڄ
I V I
F
y=
T yڃڍڄ
㔳 ڃڌڄڇ ڃڍڄ 㠦㍲ 㩚⮮ 䎆 ڤڤڤڤ⓪ 䆪㧒㦮 㩚⮮㧊 Ⳇ Ὃ₆Ṛ⁏ 䆪㧒㦮 Ṧ₊㑮 ⁎Ⰲἶ 㧦₆㧻㧊 㰖 ڇ
⋮⓪ ┾Ⳋ㩗 ❇㦮 䞾㑮⪲ 㩫㦮♶ 㑮 㧞⓪ ڱڱڱڱ
ۓ㢖 ڱڱڱڱ
۔⪲ 䧮㧊 Ἒ㌆♮㠊 㰚┺ 㤆ⰂṖ 㤦䞮⓪ ډ ڡڡڡڡ
ۓ㢖 ڡڡڡڡ
۔Ṗ 㧞┺ἶ 䞮Ⳋ ⁎ộ㠦 䟊╏♮⓪ 㩚⮮㦮 䟊⓪ 㥚㦮 㔳㠦㍲ ⶊ䞲╖Ṗ ♲┺ 㯟 㔳 ډ ڇ ڃڌڄ ὒ ڃڍڄ 㦮 㡃ὖἚṖ 㥶㧒䞮㰖 㞠₆ ➢ⶎ㠦 㾲㩗䟊⯒ ڃڎڄ 㠦
㍲㢖 ṯ㦖 㩚⮮⺆ 䟟⪂㦚 ἆ㩫䞾㦒⪲㍲ ㍶䡫䢪
⯒ 㧊⭆ 㑮 㧞┺ډ
=
y x b
i i i W I
ڃڎڄ
⁎Ⰲἶ 㩚⮮ ⺆䟟⪂㦚 ╖㧛䞮㡂 䧮㦚 ῂ䞮 Ⳋ 㔳 ڃڌڄ ὒ ڃڍڄ ⓪ ṗṗ 㔳 ڃڏڄ 㢖 ڃڐڄ 㢖 ṯ㧊 ㍶ 䡫䢪♮㠊 䚲䡚♲┺ډ
x b
i
x
i
x
C
F = ڃڏڄ
y b
i
y
i
y
C
F = ڃڐڄ
⁏ ἓ䟻 㧦₆㠊Ⱇ㠦㍲ 㩚⮮ ⺆ 䟟⪂
ړ
㦮 䞲 㡞⓪ 㞚⧮㢖 ṯ┺ډ
0.5051 0.4572 0.1894 0.5051 0.1894 0.4572 0.5051 0.1894 0.4572
0.5051 0.4572 0.1894 0.5051 0.4572 0.1894 0.5051 0.1894 0.4572 0.5051 0.1894 0.4572
0.5051 0.4572 0.1894
− − −
−
− −
= − −
−
−
− −
W
ڃڑڄ
ἶ㧻 䠞㣿 㞢ἶⰂ㯮㦖 㧊㠊㓺 㩚⮮㦮 ㍶䡫 䢪㢖 䧮㦚 ⌒ 㑮 㧞⓪ 䆪㧒㦮 㭧⽋㎇㧊⧒⓪ ㌂㔺 㦚 㧊㣿䞲┺ Ⱒ㟓 ⳝⳝ㦮 䆪㧒㧊 ἶ㧻⌂㦚 ➢ ډ
㌞⪲㤊 㩚⮮ ⺆ 䟟⪂㧊 㩲㠊 㩚⮮㢖 ὖἚ♮㠊
㌂㣿♮㠊㰖Ợ ♲┺ 㡞⯒ ✺㠊 㼁 ⻞㱎 䆪㧒㧊 ډ ἶ㧻⌂㦚 ἓ㤆 㔳 ڃڒڄ 㦮 㩚⮮ ⺆ 䟟⪂㦖 㿫㦮 ⶊỢ⯒ 㰖㰖䞮⓪◆ 㿿䞲 䧮㦚 䥮䞶 㑮 㧞Ợ 䟊 㭖┺ډ
1
0 0 0
1.01 0.6466 0.6466 0 0.6466 0.2678 1.01 0 0.3788
0 0.9145 0.3788 1.01 0.2678 0.2678
0 0.2678 0.6466 1.01 0.9145 0
− − −
−
− −
= − −
− −
− −
− −
W
ڃڒڄ
㥚㦮 㧊⪶㦖 Ṳ㦮 䆪㧒㭧 ⁎ ⪲ 㧎㩧䞮ἶ ړ 㧞⓪ 䟻㦮 Ṳ㦮 䆪㧒㧊 ἶ㧻⌂┺ 䞮▪⧒☚ 㔳 ڎ ὒ ṯ㦖 㩚⮮ ⺆ 䟟⪂㦒⪲ 㤦䞮⓪ 㩲㠊 㩚 ڃړڄ
⮮⯒ ㌳㎇䞶 㑮 㧞Ợ ♲┺ډ
123
0 0 0
0 0 0
0 0 0
0.6667 0.4483 1.5307 0 0.9511 2.2961 0 0.9511 2.2961 0 0.9511 2.2961 0.6667 1.3994 0.7654
− −
= − −
− −
− −
− − −
W
ڃړڄ
⁎⩂⋮ 㡆㏣㩗㦒⪲ Ṳ㦮 䆪㧒㧊 ἶ㧻⋲ ἓ㤆 ڎ 㧦₆㠊Ⱇ㦮 㰖㰖 ⓻⩻㦖 ἶ㧻⋮㰖 㞠㞮㦚 ➢㦮
㑮㭖㦒⪲ 㭚㠊✺Ợ ♲┺
ڌڏڀ ډ
4. Sensor Fault Tolerance
㞷䁚㠦㧊䎆 ἶ㧻 䠞㣿ὒ Ⱎ㺂Ṗ㰖⪲ ㎒㍲ἶ㧻 䠞㣿 ☯㧧㦚 㥚䟊㍲⓪ ㎒㍲㦮 㭧⽋㎇㧊 䞚㣪䞮
┺ ➆⧒㍲ ډ ڌڑ ⁏㦮 Ⱇ 䡫䌲㦮 㥶☚䡫 㥚䂮㎒㍲⯒
㢖 ṯ㧊 ⺆㡊䞮㡖┺ 㯟 Ṳ㦮 ⁏㦚 䞮⋮
ڡۄۂډ ڏ ډ ڇ ڍ
㦮 䆪㧒⪲ 㡆ἆ䞮ἶ ⁎⩆ 䆪㧒 ⁎⭏ 㭧 Ⱎ㭒⽊ ڇ ἶ 㧞⓪ ộ㦚 㕣㦒⪲ ㌂㣿䞮㡂 䞮⋮㦮 㿫㦚 ╊╏
䞮⓪ ㎒㍲⪲ ㌂㣿䞮㡖┺ ➆⧒㍲ ډ ڡۄۂډ ڏ 㠦㍲ 㽳
₢㰖㦮 ㎒㍲ 㺚⍦㦚 㠑㠞┺ ➆
ڮڌڇ ڮڍڇ ڮڎڇ ڮڏ ډ
⧒㍲ ㎒㍲ ⍺ Ṳ㦮 ṗ☚Þľ
Îì ľ
Ïì ľ
Ðì ľ
Ñß㠦㍲㦮 ㎒㍲
㿲⩻Ṩ s
1, s
2, s
3, s
4⧒ἶ 㩫㦮䞮Ⳋڇ
=
y x
s s s s
4 4
3 3
2 2
1 1
4 3 2 1
sin cos
sin cos
sin cos
sin cos
θ θ
θ θ
θ θ
θ θ
ڃڔڄ
⡦⓪ڇ
Ax
S = ڃڌڋڄ
⪲ ⋮䌖⌒ 㑮 㧞┺ډ
㔳 (10) 㦖 㥶㧒䟊⯒ Ṭ㰖 㞠㦒⸖⪲
⯒ 㧊㣿䞮㡂 㞚⧮㢖 ṯ㧊 㾲㩗䢪 䟊 pseudo-inverse
⯒ ῂ䞶 㑮 㧞┺.
s G As A A
x = (
T)
−1=
sڃڌڌڄ
Fig. 4 Fault-tolerant inductive sensor
䞮⋮㦮 ㎒㍲ 㺚⍦㧊 ἶ㧻⌂㦚 ἓ㤆 䟟⪂ 㠦 ڇ ڜ
㍲ ╖㦧♮⓪ 㡊㦚 㩲Ệ䞾㦒⪲㖾 ㎒㍲ Ợ㧎 䟟⪂
Ƒ
⯒ ῂ䞶 㑮 㧞┺ ⁎Ⰲἶ ډ ۄ ⻞㱎 㺚⍦㧊 ἶ㧻
⌂㦚 ➢㦮 ㎒㍲ Ợ㧎 䟟⪂㦚
ƑƇ⧒ἶ 㞚⧮㢖 ṯ 㧊 ⋮䌖⌒ 㑮 㧞┺ډ
Ɩ
Ƈá
ƑƇƑ Ƈ á ÎìÏìÐìÑ ڃڌڍڄ 㔳 ڃڌڍڄ ⯒ 㧊㣿䞮㡂 ⻞㱎 㺚⍦ 㿲⩻㦚 㩲㣎 䞲 ⋮Ⲏ㰖 㺚⍦㦮 㿲⩻Ṩ㦒⪲䎆 ㎒㍲ 㿲⩻㦚 㠑㦚 㑮 㧞┺ 㧊 ㎒㍲ 㿲⩻㦒⪲䎆 ⳾✶ 㺚⍦㦮 ډ 㿪㩫㿲⩻ Ɩ
Ƈ⯒ ῂ䞶 㑮 㧞ἶ 㿪㩫 㿲⩻ὒ 㔺㩲 㿲⩻ὒ㦮 㡺㹾⯒
ƃ
Ƈá IIƑ à Ɩ
ƇII
Ïڃڌڎڄ
㢖 ṯ㧊 ῂ䞶 㑮 㧞┺ 㧊⩝Ợ ῂ䞲 ⳾✶ . ƃ
ƇṖ 0 㧊Ệ⋮ 㠦 ⰺ㤆 Ṗ₳┺Ⳋ ἶ㧻 ㌗䢿㧊 㧒㠊⋮㰖 0 㞠⓪ ἓ㤆㧊ἶ ╖⪲ 㠊ⓦ 䞲 ƃ
ƇṖ ┺⯎ Ṳ㦮 㡺 3 㹾⽊┺ 㧒㩫Ṩ 㧊㌗㦒⪲ 䋂┺Ⳋ ⻞㱎 㺚⍦㦮 ㎒ i
㍲ ἶ㧻 ㌗䢿㦒⪲ 䕦┾䞶 㑮 㧞┺.
5. Experimental Setup
⓪ 㔺䠮㧻䂮㦮 ῂ㎇㦚 ⽊㡂 㭒ἶ 㧞┺ 㩲
Fig.5 .
㠊₆⪲⓪ dSPACE ㌂㦮 DS1104 ⯒ ㌂㣿䞮㡂 ἶ㧻 䠞㣿 㞢ἶⰂ㯮㦚 㑮䟟䞮㡖┺ 䝚⪲⁎⧾㠦㍲ 㩲㠊 .
₆⪲⓪ 㧒㩗㧎 PID 㩲㠊⯒ ㌂㣿䞮㡖┺ .
㞷䁚㠦㧊䎆 ἶ㧻 䕦⼚㦚 㥚䟊 䢖 䡫䌲㦮 㩚⮮
㎒㍲⪲ 䆪㧒㦮 㩚⮮㟧㦚 䁷㩫䞮㡖┺.
Fig. 5 Experimental Setup
6. Experimental Results
㠦㍲ ⽊⓪㢖 ṯ㧊 Ṳ㦮 㡆㏣㩗㧎 䆪㧒
Fig. 6 3
㧊 ἶ㧻 ㌗䢿㧒➢㦮 ⪲䎆㦮 ṗ 㿫䟻㠦㍲㦮 㥚䂮
⯒ ⋮䌖⌊ἶ 㧞┺ . P Ợ㧎㦖 2.4, D Ợ㧎㦖 0.002 㧊 ἶ I Ợ㧎㦖 㦒⪲ ㍺㩫䞮㡖┺ ⳾䎆⓪ 㩫㰖 ㌗䌲 0 . 㧊Ⳇ Ṳ㦮 䆪㧒㧊 ἶ㧻⌂㦚 㔲㩦㠦㍲ 㟓Ṛ 䦪✺ 3 Ⰲ㰖Ⱒ ⪲ 㤦⧮㦮 ⪲䎆 㥚䂮⪲ ☢㞚㢊㦚 㞢 㑮 㧞┺.
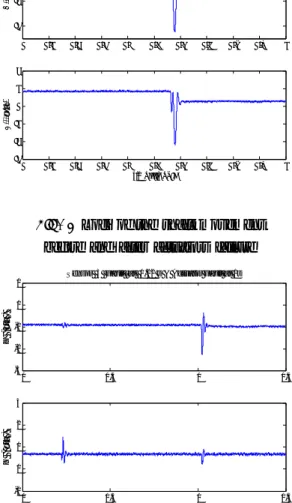
㠦㍲ ⽊⓪ ộὒ ṯ㧊 ㎒㍲㢖 㞷䁚㠦㧊䎆 Fig. 7
ἶ㧻㧊 ☯㔲㠦 㧒㠊⌂㦚 ἓ㤆㦮 ⪲䎆㦮 㤖㰗㧚㦚
⁎⧮䝚⪲ ⋮䌖⌎ ộ㧊┺ Ṳ㦮 ㎒㍲ 㺚⍦㭧 䞮⋮ . 4 Ṗ 㻮㦢㦒⪲ ⊠㠊㰖ἶ ⋮ἶ ┺㦢㠦⓪ 䞮⋮㦮 䆪㧒 㧊 ⊠㠊㪢㦚 ἓ㤆 ⚮ ┺ ἶ㧻㧊 㧒㠊⌂㦚 ἓ㤆㠦
⓪ 㤖㰗㧚㧊 㞞䞮㰖Ⱒ ⪲ 㤦⧮㦮 㤖㰗㧚╖⪲
㧧☯♮⓪ ộ㦚 䢫㧎䞶 㑮 㧞┺.
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-3 -2 -1
0 Coil 1, 2, 3 Fault
X (µm)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
-3 -2 -1 0 1 2
time ( sec) Y (µm)
Fig. 6 Loci of the shaft movement before and after actuators failure
0 0.5 1 1.5
-3 -2 -1 0
1 Sensor 3 Fault at 0.22 s & Actuator Fault at 1s
X ( µm )
0 0.5 1 1.5
-1 0 1 2 3
time ( sec) Y ( µm )