DOI : http://dx.doi.org/10.5394/KINPR.2020.44.2.136
A Basic Study on Connected Ship Navigation System
Wonjin Choi*․†Seung-Hwan Jun
*Student, Graduate School of Korea Maritime and Ocean University, Busan, Korea
†Professor, Division of Navigation Science, Korea Maritime and Ocean University, Busan, Korea
Abstract: Maritime autonomous surface ships (MASS) has been developed over the years. But, there are many unresolved problems.
To overcome these problems, this study proposes connected ship navigation system. The system comprises a slave ship and a master ship that leads the slave ship. To implement this system, communication network, route planning algorithms, and controllers are designed. The communication network is built using the transmission control protocol/Internet protocol (TCP/IP) socket communication method to exchange data between ships. The route planning algorithms calculate the course and distance of the slave ship using the middle latitude sailing method. Nomoto model is used as the mathematical model of the slave ship maneuvering motion. Then, the autoregressive with exogenous variables (ARX) model is used to estimate the parameters of Nomoto model. Based on the above model, the automatic steering controller is designed using a proportional-derivative (PD) control. Also, the speed controller is designed for the slave ship to maintain constant distance from the master ship. Sea experiments are conducted to verify the proposed system with two remodeled boats.
Key words: Connected Ship Navigation System, Nomoto Model, ARX Model, TCP/IP Socket Communication, Middle Latitude Sailing Method, PD Controller
†Corresponding author, [email protected] 051)410-4245
* [email protected] 051)410-4881
Note) This paper was presented on the subject of "A Basic Study on Convoy Navigation" in Asia Navigation Conference 2019(Busan Port International Exhibition & Convention Center, 21st-23rd Nov, 2019, pp.525-530).
1. Introduction
Recently, maritime autonomous surface ships(MASS) has attracted much attentions as a game changer in the maritime industry. The International Maritime Organization(IMO) defined MASS as a ship which can operate independently of human interaction and divided the degree of autonomy into four stages at the 99th Maritime Safety Committee in 2018(IMO, 2018).
Because MASS has great advantages from economic point of view, so many researches are actively being conducted in many countries. In Norway, Yara International and Kongsberg developed Yara Birkeland. This vessel was designed to navigate along the coast autonomously and aims to launch in early 2020(Yara International, 2018). The Japanese NYK Line succeeded in the MASS trial performed in accordance with IMO interim guidelines(IMO, 2019). The sea trial was conducted by a car carrier Iris Leader(L : 200 m, B : 34.8 m, GT : 70,826 t)(NYK Line, 2019). The Korean government is planning a MASS project for 6 years from 2020 to develop core technologies(Ministry of Oceans and Fisheries, 2019).
Even if technology reaches the level of autonomous coastal navigation, there are still many problems with hull
maintenance, communications, security, emergency response to accident and etc. Due to the above reasons, more time is required to develop a fully autonomous vessel. To overcome these problems, there were researches on a navigation system consisting of a manned vessel and several unmanned vessels.
Hannu, et al.(1998) proposed convoy navigation system and verified by computer simulations and field tests. The convoy system consists of a manned master vehicle and one or more unmanned slave vehicles, and the slave vehicles follow the master according to established rules.
Liu and Bucknall(2015) developed an algorithm for the unmanned surface vehicle(USV) fleet navigation and verified it by computer simulations. The fleet is composed of one leader USV and two follower USVs, and the algorithm is designed to follow a planned route, avoiding collisions with other vessels by taking certain formation, such as straight line or triangle.
In this study, authors propose connected navigation
system in which one manned master ship leads one or more
unmanned slave ships. This system has the advantage that
the crew of the master ship can move to an unmanned
slave ship using a vehicle, so that it can be solved
immediately in case of an emergency. To implement this
system, this paper deals with communication network, route planning algorithms, automatic steering controller and speed controller. The system of this research consists of one master and one slave ship as a basic study and is verified its effectiveness by sea experiments.
2. System design
2.1 Communication network
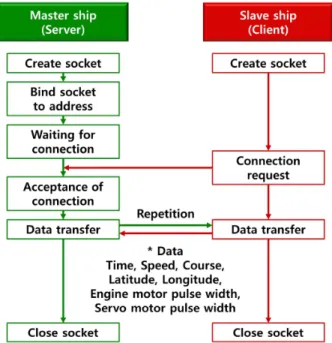
Communication network must be constructed first to design the system, because the slave ship needs to receive position data from the master ship wirelessly to set the route. The transmission control protocol / internet protocol (TCP/IP) socket communication method was used in this study. Fig. 1 shows the communication procedure of the system, the master ship is the server and the slave ship is the client.
Fig. 1 TCP/IP socket communication procedure
The communication procedure is as follows. First, the server and client create sockets. The server binds the IP address and port number to the created socket, then waits for the client to connect. If the client requests a connection to the server, then the server receives the request and accepts the connection. Once connected, the two ships exchange data with each other such as time, speed, course, latitude, longitude, engine motor pulse width and rudder
servo motor pulse width. These data are used for the slave ship to set up the route. When the master ship determines that it is no longer necessary to transmit data, the socket is closed to terminate the connection.
2.2 Route planning algorithms
When the slave ship successfully receives the data, the slave ship stores the latitude and longitude of the master ship as a reference point. Then the slave ship calculates the course and distance to the reference point using middle latitude sailing method. If the calculated distance is 5 m or less, the slave ship is considered to have already passed the reference point, and the distance and course to the next reference point are calculated. This process is repeated when the slave ship is underway.
Middle latitude sailing method is based on the assumption that “the departure() between two specific points is equal to the arc length of the meridians of the two points at the middle latitude( ).”. If the middle latitude is less than 60 ° and the sailing distance( ) is within 600 nautical miles, the error range is less than 1 %.(Yoon et al., 2013).
When the starting point is and the arriving point is , the course( ) and the sailing distance ( ) between the two points are calculated by Eq. (1) and Eq. (2).
tan
cos
(1)
sec × × (2)
Where difference of longitude , difference of latitude
, middle latitude and departure are obtained by the following equations.
(3)
(4)
(5)
cos (6)
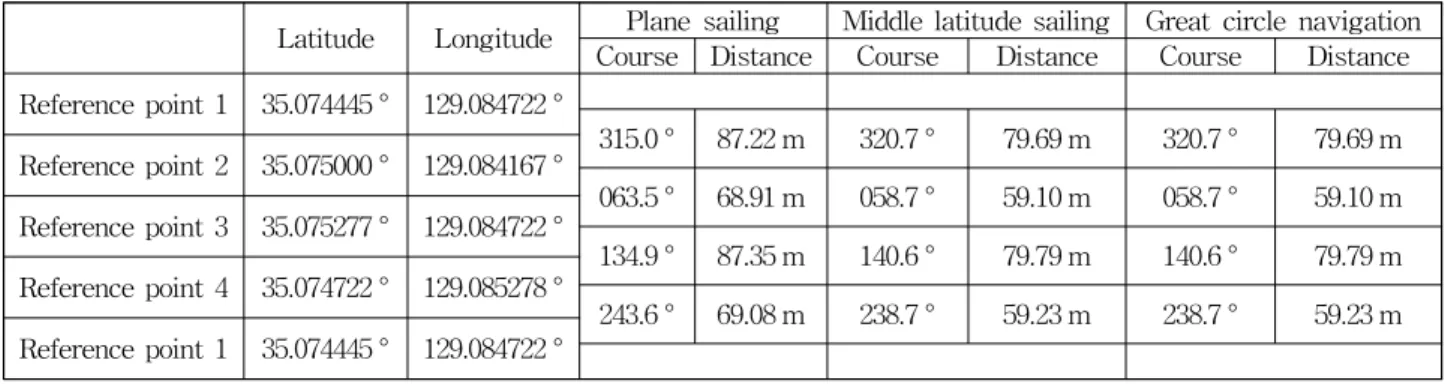
Table 1 shows the results of calculating the course and
distance between each reference point using the plane
sailing method, middle latitude sailing method and great
circle navigation method.
Latitude Longitude Plane sailing Middle latitude sailing Great circle navigation Course Distance Course Distance Course Distance Reference point 1 35.074445 ° 129.084722 °
315.0 ° 87.22 m 320.7 ° 79.69 m 320.7 ° 79.69 m Reference point 2 35.075000 ° 129.084167 °
063.5 ° 68.91 m 058.7 ° 59.10 m 058.7 ° 59.10 m Reference point 3 35.075277 ° 129.084722 °
134.9 ° 87.35 m 140.6 ° 79.79 m 140.6 ° 79.79 m Reference point 4 35.074722 ° 129.085278 °
243.6 ° 69.08 m 238.7 ° 59.23 m 238.7 ° 59.23 m Reference point 1 35.074445 ° 129.084722 °
Table 1 Comparison of plane sailing method, middle latitude sailing method and great circle navigation method.
Although the distance between the reference points is less than 80 m, there was a difference between the plane sailing method and middle latitude sailing method about 5 to 6 degrees on the course and about 34 m on the total distance. Since the plane sailing method assumes the earth as a plane, the theoretical error is large. On the other hand, the calculation results of the middle latitude sailing and the great circle navigation method were almost same. Because the great circle navigation method has high accuracy. But, it has a large amount of calculation and has the disadvantage that the ship’s course should be changed frequently. So, simple calculation but high accuracy middle latitude sailing method was adopted in this study.
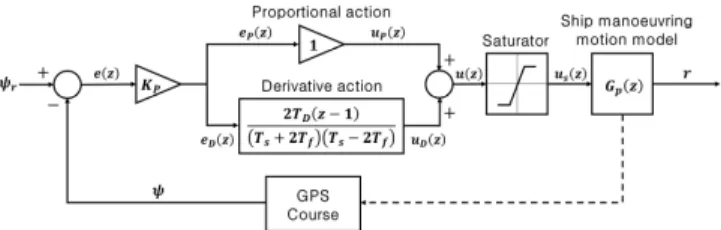
2.3 Automatic steering controller
(a) Ship manoeuvring motion model
Considering the ship as a rigid body, the ship manoeuvring motion is described for the ship fixed coordinate system( ) with the coordinate origin at the ship’s center of gravity( ) as shown in Fig. 2.
Fig. 2 Ship fixed coordinate system
Where is rudder angle, is drift angle, is turning rate, and are -axis speed and -axis speed, and is the sum of and . And the ship manoeuvring motion can be formulated as a combined motion by the inertia, propulsion and external forces. On the other hand, the mathematical model proposed by Nomoto et al.(1957) is relatively simple and has the advantage that the slave ship manoeuvring motion could be expressed as a relationship between input(rudder angle) and output(turning rate), not in terms of fluid force. Nomoto model has limitations in representing the motion of the ship accurately. However, the purpose of this paper is to find out the effectiveness of the proposed system using RC boats, so simple Nomoto model was adopted that can predict the manoeuvring motion model of ship with minimal information. And the autoregressive with exogenous variables(ARX) model(Ljung, 1987) was used to estimate the manoeuvring indices and , unknown coefficients of Nomoto model.
The ARX model generates a transfer function from input-output data, and then estimates the parameters of the transfer function. This method has been used in a study by Kim(2011) to build the USV manoeuvring motion model.
(b) Nomoto model
Nomoto suggested the model expressed by rudder angle (), turning rate() and manoeuvring indices( ) shown as Eq. (7).
(7)
If in Eq. (7), Nomoto model can be
expressed as Nomoto first order model as in Eq. (8), and
the transfer function is as in Eq. (9).
(8)
(9)
(c) ARX model
Since the ship is constantly moving, the ship manoeuvring motion should be handled on a continuous time series. In this study, however, the ship manoeuvring motion was handled on a discrete time series because the ship was controlled by a digital signal. The ship maneuvering motion was analyzed using the discrete-time ARX model. This model estimated the current turning rate by Eq. (10) using the previous turning rates, the current rudder angle, the previous rudder angles and random noise.
(10)
Where is time delay operator, is time delay in the system, is random noise and coefficient terms and can be expressed by Eq. (11) and Eq. (12). Where
and are the orders of the ARX model,
and
are the parameters of the ARX model.
⋯
(11)
⋯