大 韓 土 木 學 會 論 文 集 第29卷 第1D 號·2009年 1月 pp. 319~327
測量 및地形空間情報工學
관측데이터 처리의 품질제어를 통한 GPS 측위의 신뢰성 향상
Application of Quality Control Procedure to Improve Reliability of GPS Positioning
이경성*·이흥규**
Lee, Kyeong-Seong·Lee, Hung-Kyu
···
Abstract
In order to estimate accurate position by GPS observations, it is prerequisite to define both of the correct function model and the realistic stochastic model. In the case that un-modeled outliers exist in observations, estimates become biased, and their standard deviations are unable to be used as a measure which represents their accuracy. Hence, such outliers should be appro- priately removed from the observations before estimating final solutions, so that the accuracy can be maximized with the improvement of the reliability. For this purpose, this research deals with quality control and quality measure computation algo- rithms for GPS stand-alone positioning. After theoretical studies, all the algorithms have been implemented and tested with real observations. Results of the tests indicate that the reliability of the estimated position is improved by increasing redundancy as well as using good satellite geometry and more realistic stochastic model. Moreover, the adaptation of the quality control pro- cedure enable to improve positioning reliability and accuracy by appropriately excluding outlier in observations.
Keywords :GPS, Outlier, Quality Control, Reliability
···
요 지
GPS 관측에 의해 정확한 위치추정을 위해서는 올바른 함수모형과 통계모형이 사용되어야 한다. 그러나 함수모형에 고려되 지 않는 과대오차가 관측데이터에 포함되어 있는 경우는 추정좌표에 편의를 유발 시킨다. 이러한 과대오차는 전리층영향과 다중경로의 급격한 변화 혹은 수신기 오작동에 의해 주로 발생하며, 최소제곱법에 의한 수신기 위치 추정에서 반드시 제거 해야 정확도를 최대화 할 수 있다. 이를 위하여 본 연구에서는 과대오차의 검출, 규명, 적용의 세 단계로 구성된 GPS 관 측데이터 처리에서의 품질제어 알고리즘과 통계검정 기법의 성능을 나타내는 신뢰도 이론을 연구하여 의사거리를 이용하는 단독측위에 대하여 구현하였다. 이를 바탕으로 정지측위와 동적측위 관측실험을 실시하여 분석한 결과 잉여관측데이터수가 많고 기하구조의 강도가 높고 보다 현실적인 통계모형을 사용할 때 과대오차 규명 성능이 높아졌으며, 관측데이터에서 과대 오차가 제거됨에 따라 추정좌표의 정확도가 증가되어 전체적으로 GPS 측위의 신뢰성을 향상 시킬 수 있었다.
핵심용어 : 범지구위치결정체계(GPS), 과대오차, 품질제어, 신뢰도
···
1. 서 론
인공위성기반의 측위항법 시스템인 GPS는 1995년 FOC
(Full Operation Capability) 단계에 진입한 이후 2000년
SA(Selective Availability)의 제거에 의한 측위정확도 향상과
위성 신호의 수신기술 및 새로운 관측데이터 처리 알고리즘 의 개발을 통해 실시간 위치 정보를 필요로 하는 측량을 비 롯한 선박, 차량, 항공기의 항법 분야에서 광범위하게 활용되 고 있다. 또한 최근에는 첨단 IT(Information Technology)와 통신기술을 결합한 위치기반서비스(LBS), 텔레매틱스
(Telematics), 지능형교통체계(ITS) 등과 같은 새로운 응용분
야의 등장으로 인하여 그 활용성이 크게 증가할 것으로 기 대되고 있다.
GPS 수신기 위치는 일반적으로 함수모형(functional
model)과 통계모형(stochastic model)을 이용하여 최소제곱법
에 의해 추정된다. 여기서 함수모형은 관측데이터와 추정 파 라메타 사이의 수학적 관계이며 통계모형은 관측데이터의 불 확실성(즉, 정밀도)을 나타내는 것으로 각각 계수행렬과 분산 -공분산 행렬로 정의한다. 따라서 수신기 위치의 정확한 추 정을 위해서는 올바른 함수모형과 통계모형의 사용이 필수 적이고 이를 통한 위치추정 정확도는 표준편차에 의해 표시 할 수 있다. 그러나 함수모형에 고려되지 않은 과대오차가 관측데이터에 포함되어 있는 경우는 추정좌표에 편의가 발 생하게 되며, 추정좌표의 표준편차는 이러한 영향을 반영할 수 없어 더 이상 정확도를 나타내는 지표로 사용할 수 없게 된다. 관측데이터의 과대오차는 전리층 효과의 급격한 증가
*창원대학교대학원토목공학과석사과정 (E-mail : [email protected])
**정회원·교신저자·창원대학교 토목공학과 조교수 (E-mail : [email protected])
− 320 − 혹은 수신기의 오작동에 의해 주로 발생하며, 최소제곱법에 의한 수신기 위치 추정에서 반드시 제거하여야 그 정확도를 최대화할 수 있다. 이를 위해서는 GPS 관측데이터의 처리 과정에 과대오차를 검출(detection), 규명(identification), 적용 (adaptation)하여 제거할 수 있는 품질제어(quality control)를 수행해야 한다(Salzmann, 1994). 즉, 위치 추정에 사용하는 관측데이터에서 과대오차의 유·무를 검출한 이후 검출된 관 측데이터들 중에서 과대오차를 포함하는 데이터를 규명하고 적용 단계에서 제거하여 최종적인 수신기 위치를 추정해야 한다.
GPS 관측데이터에 포함되어 있는 과대오차를 검출하여 규 명하기 위해서는 최소제곱 추정의 사후분산인자(a posterior
variance factor)와 잔차(residual)에 대하여 통계적 가설검정
기법을 적용한다(Cross 등, 1994; Tiberius, 1998). 이러한 통계검정의 성능에 가장 큰 영향을 미치는 요소는 관측데이 터의 수와 추정해야 할 미지수의 수와의 차이로 정의되는 자유도(degree of freedom), 즉 잉여관측데이터 수로써 검출 을 위해서는 최소한 1개 그리고 규명을 위해서는 2개 이상 이 필요하다. 이와 함께 GPS 측위에서는 위성의 기하구조와 관측데이터의 불확실성(정밀도)도 통계검정의 성능에 영향을 미치는 중요한 요소가 된다. 따라서 관측데이터의 품질제어 절차에 사용되는 통계검정의 성능을 객관적으로 나타낼 수 있는 신뢰성 지표가 필요하며 추정된 수신기의 위치의 정확 도를 파악하기 위해서 이것을 반드시 고려해야 한다. 통계검 정의 신뢰도는 내부신뢰도(internal reliability)와 외부신뢰도
(external reliability)로 나누며 전자는 통계검정에 의해 검출
할 수 있는 최소의 과대오차의 크기를, 후자의 경우는 검출 되지 않은 과대오차가 수신기 위치 추정에 발생시키는 편의 의 크기를 의미한다.
GPS 관측데이터 처리의 품질제어는 위치추정의 정확성과 신뢰성 확보에 큰 영향을 미치기 때문에 그동안 국내·외에 서 다양한 연구가 수행된 바가 있다. Cross 등(1994)은 GPS측위에서 과대오차 규명을 위한 통계검정 기법과 품질제 어 절차의 성능을 나타내기 위한 척도로 신뢰도를 제안하였 다. Tiberius(1998)는 최소제곱법에 의한 수신기 위치 추정에 서 품질제어 절차와 관련된 이론적 배경과 알고리즘을 정립 하여 DGPS 측위에 적용하였다. Ryan 등(2000)은 GPS 신 호의 일부분이 장해물에 의해 단절되는 경우에 Galileo 위성 을 추가로 사용하는 GPS/Galileo 통합측위 환경에서 과대오 차 규명의 성능에 미치는 요인들에 대한 분석을 실시하였다 . 국내의 경우는 후처리 목적으로 GPS 수신기에 의해 취득 된 관측데이터 자체의 오차의 크기를 분석하는 소프트웨어 를 통해 관측데이터의 품질을 확인하여 문제가 있는 경우 재관측을 통해 측위의 정확도를 향상시키기 위한 방법들이 연구된 바 있다(서영진 등, 2004; 윤홍식 등, 2006). 그러나 이러한 방법은 후처리 방식에 의한 측위만 적용이 가능하고 관측데이터에 부분적으로 과대오차가 포함되어 있는 경우 그 적용에 한계성이 있다.
본 논문에서는 의사거리에 의한 GPS 단독측위의 경우에 대해 관측데이터 처리와 품질제어절차 알고리즘을 연구하고 구현하였다. 이를 바탕으로 현장 관측실험을 통해 취득된 데 이터를 이용하여 관측데이터의 잉여관측데이터의 수, 위성의
기하구조 그리고 사용하는 통계모형이 관측데이터의 품질제 어 절차에 미치는 영향을 분석하였으며, 구현된 알고리즘의 성능을 평가하기 위해 실시한 정지측위와 동적측위 실험의 결과를 요약하였다.
2. GPS 관측데이터처리에서 품질제어
2.1 수신기위치추정
n개의 GPS 의사거리 관측데이터를 사용하는 단독측위에서 최소제곱법에 의한 수신기 위치 추정을 위한 함수모형은 수 신기 초기좌표를 이용하여 선형화하면 다음과 같은 행렬식 으로 나타낼 수 있다.
(1)
여기서 L은 관측벡터, A는 계수행렬, X는 미지벡터 그리고 V는 잔차벡터이다.
관측데이터의 정밀도를 나타내는 통계모형은 분산-공분산 행렬 에 의해 나타낼 수 있으며 모든 위성의 관측데이터를 동일한 정밀도로 고려하면 식 (2)와 같으며, 보다 현실적으 로 위성의 고도각에 따라 그 정밀도를 차등을 준다면 식 (3)과 같이 나타낼 수 있다.
(2) 여기서 σ2은 관측데이터의 정밀도를 나타내는 분산 그리고 I는 n×n의 단위행렬이다.
(3)
최소제곱의 원리(VTQl-1V=최소)에 의해 식 (1)에서의 미지 벡터는 식 (4)와 같이 추정되며 이 때 추정 잔차는 식 (5) 에 의해 계산된다.
(4) (5) 추정벡터와 잔차의 분산-공분산 행렬 와 QV는 다음과 같이 얻어질 수 있으며,
(6)
(7) 사후분산인자(a posterior variance factor)는 다음 식에 의 해 계산된다.
(8)
여기서, f는 잉여관측데이터의 수이며 n개의 관측데이터를 사용하는 경우 n-4가 된다.
L=AX V+
Ql=σ2I
Ql σ02
σ2cosec E( )12 0 0 0
0 σ2cosec E( )2 2 0 0
0 0 0 σ2cosec E( )n2
=
… … ……
Xˆ=(ATQl–1A)–1(ATQl–1L) V=L AX– ˆ
QX)
QX) =(ATQl–1A)–1
QV=Ql–A A( TQl–1A)–1AT
σ0
2 VTQl–1V ---f
=
)
2.2 품질제어절차
GPS 측위에서 전리층 효과의 급격한 변화, 다중경로 오차 의 급격한 증가 혹은 수신기 오작동에 의해 발생되는 과대 오차는 함수모형에 고려할 수 없으며 이들이 관측데이터에 포함되어 있는 경우 추정좌표에 큰 편의를 발생시키기 때문 에 최종적인 수신기 위치를 추정하기에 앞서 반드시 제거해 야 그 정확도를 최대화할 수 있다. 이를 위하여 GPS 관측 데이터 처리에서 포함된 과대오차를 ‘검출’, ‘규명’, ‘적용’하 여 제거하는 일련의 절차를 “품질제어”라 한다.
GPS 데이터 처리에서 품질제어 절차에서 ‘검출’은 데이터 처리에 사용되는 관측데이터에 과대오차의 포함 여부를 판 정하는 단계로 최소 1개 이상의 영여관측데이터를 필요로 한다. 이에 반해 ‘규명’은 과대오차가 검출된 여러 관측데이 터들 중에서 어떠한 관측데이터에 과대오차가 존재하는지를 판단하며 최소한 2개 이상의 잉여관측데이터가 필요하다. 만 약 과대오차의 검출과 규명에 필요한 최소한의 잉여관측데 이터의 수가 확보되지 않는 경우라면 사용자에게 이 사실을 경고해야 한다. 그리고 품질제어 절차의 마지막 단계인 ‘적 용’에서는 과대오차로 규명된 관측데이터를 제거하여 새로운 함수모형과 통계모형이 작성된다.
관측데이터에 과대오차의 존재를 ‘검출’하기 위해서는 식 (8)의 사후분산인자에 대하여 통계적 가설검정을 실시하며 이 를 위한 귀무가설(H0)와 대립가설(Ha)은 다음과 같고,
(9)
귀무가설의 기각영역은 잉여관측데이터수 f, 유의수준 (significance level) α. 검정력(power of test) (1-β)일 때 F-분포에 대해 다음과 같이 설정한다(Barada, 1968; Cross 1983).
(10) (11) 만약 식 (10)과 (11)에 의하여 귀무가설이 기각될 때 관측 데이터에 과대오차가 포함된 것으로 판정하며 이를 위해서 는 최소 1개 이상의 잉여관측데이터가 필요하기 때문에 GPS 단독측위에서는 최소한 5개의 위성으로부터 신호가 수 신되어야 한다.
과대오차의 규명은 검출된 관측데이터들에 대해 실시하며 그 중 어느 데이터에 과대오차가 포함되어있는지를 판정한 다. 관측벡터 L에서 i번째 관측데이터를 li, 추정한 관측데이 터를 , 정규분포를 따르는 우연오차를 εi 그리고 함수모 형에 고려되지 않은 오차를 ∆li라 할 때 과대오차 규명을 위한 귀무가설과 대립가설은 다음과 같이 설정하며,
(12)
가설검정을 위한 통계값은 다음 식에 의해 계산되고 이 값은 표준정규분포를 따르는 것으로 알려져 있다(Barada, 1968; Cross 1983).
(13)
여기서, ci는 해당 관측데이터에 대한 wi를 계산하기 위해 필요한 i열의 원소를 1로 하는 단위벡터 ci= [0 0 0 … 1 0]이다.
귀무가설의 채택 여부는 표준정규분포(N)에 대해 양쪽꼬리 검정에 의해 결정한다. 이를 위한 기각영역은 다음과 같이 설정하고 이를 만족하게 되면 과대오차가 포함된 것으로 판 정한다.
(14) 과대오차 규명을 위한 가설검정은 검출된 관측데이터들에 대해 계산된 wi중 가장 큰 값을 가지는 1개의 관측데이터 에 대해 실시한다. 이것은 식 (12)에 보이는 바와 같이 설 정된 가설에 단지 1개의 과대오차만을 고려하였기 때문이다.
만약 2개 이상의 과대오차가 존재하는 경우는 동일한 절차 를 반복 수행해야 하며, 특히 이 경우 ‘1+과대오차 수’ 만 큼의 잉여관측데이터의 수를 필요로 한다. 따라서 GPS 단독 측위의 경우 관측데이터에 포함된 과대오차를 규명하기 위 해서는 ‘5+과대오차의 수’ 만큼의 위성 관측데이터가 필요하 다. 일반적으로 GPS 단독측위를 위해 필요한 최소 위성 관 측데이터 수가 4개로 알려져 있지만 품질제어 절차를 통하 여 최소한 1개의 과대오차의 유·무를 판정하여 규명하기 위해서는 6개의 관측데이터를 사용할 수 있어야 신뢰성 있 는 수신기 위치 추정이 가능하다. 그러나 식 (14)의 가설검 정을 통한 과대오차의 규명에서 두 가지의 오류가 발생할 가능성이 있다. 첫번째는 관측데이터에 과대오차가 존재하지 않음에도 포함하고 있다고 판정하는 가설검정의 ‘제1종 오류’
(Type I error)로 발생확률은 α%이며, 두번째는 과대오차가
존재함에도 불구하고 존재하지 않은 것으로 판정하는 ‘제2종 오류’(Type II error)로 그 발생확률은 β% 이다.
2.3 품질제어의신뢰도
GPS 관측데이터 처리의 품질제어 절차에 사용되는 통계검 정의 성능을 나타내는 지표로 신뢰도(reliability)를 사용할 수 있다(Barada, 1968; Leick, 2004). 신뢰도는 내부신뢰도 와 외부신뢰도로 나누어 사용하며 전자는 식 (14)에 의한 과대오차의 규명에서 발견할 수 있는 과대오차의 최소 크기
(MDB: Minimally Detectable Bias)로, 후자의 경우는 발견
되지 않은 과대오차가 추정에 사용되는 경우 GPS 수신기 좌표 추정에 미치는 영향을 나타낸다. 따라서 추정된 좌표의 신뢰성이 높은 경우 내·외부신뢰도의 크기가 모두 작은 값 을 가져야 한다. 이것은 과대오차 규명을 위한 통계검정에서 보다 작은 크기의 오차를 찾아낼 수 있고, 발견되지 않은 과대오차가 존재하는 경우라도 그 크기가 작아 최종 좌표추 정에 영향을 작게 미친다는 것을 의미한다.
i번째 위성 관측데이터에서 규명 가능한 과대오차의 최소 크기인 내부신뢰도 MDB는 다음 식에 의해 계산할 수 있다.
(15) H0:σ
0 2 =1 Ha:σ
0 2 ≠1
⎩⎪
⎨⎪
⎧ )
)
σ0
2)>Ff, ,∞ 1 α( – ⁄2) β+ σ0
2)<F∞ f 1 α, ,( – ⁄2) β+
li)
H0:li= lˆi +εi
Ha:li= li +εi+∆li
⎩⎪
⎨⎪
⎧ ))
wi ciTV ciQVcciT ---
=
wi>N(1–α 2⁄ ) β+
lm i,
∆ δ0 ciQV ciQVQl–1ciT ---
=
− 322 − 여기서, δ0는 편차요소로 유의수준과 검정력에 의해 계산되 며 과대오차 규명을 위한 가설검정에 사용한 것과 동일한 값을 사용해야 한다.
발견되지 않은 최대크기의 과대오차가 GPS 수신기 위치 추정에 미치는 영향은 식 (4)의 최소제곱법에 의한 미지벡 터 추정식에서 관측벡터를 대신하여 각 위성에 대해 계산 한 ∆lm,i을 원소로 하는 열벡터 ∆Lm을 대입하여 계산할 수 있다.
(16)
2.4 알고리즘의구현
이론적 연구결과를 바탕으로 GPS 의사거리 관측데이터를 이용하는 단독측위 알고리즘에 품질제어 절차를 포함하여 과 학기술용 계산 프로그램인 MATLAB에 의해 구현하였으며 총 40개의 함수 파일로 구성하였다.
그림 1은 구현된 알고리즘의 전체적인 데이터처리 흐름을 보여주고 있다. 데이터처리는 RINEX 형식의 관측파일과 항 법파일을 입력하는 것을 시작하여 관측데이터 중에서 의사 거리와 위성 항법요소를 추출하여 위성시간오차와 전리층 및 대류권 영향에 대한 보정량을 계산하여 차감하고 해당 에폭 크의 위성 좌표를 계산한다. 그 후 관측방정식과 관측데이터 의 분산-공분산 행렬을 구성하여 정규방정식을 형성한 후 최 소제곱법에 의한 좌표 추정을 실시하고 과대오차의 처리를 위한 품질제어 절차를 거친 후 처리결과는 ASCII 형태의 파일로 저장하도록 되어 있다.
그림 2는 품질제어 절차를 보다 자세하게 나타내고 있으 며 다음과 같은 5가지 경우로 나누어 데이터처리가 이루어 지게 된다.
① 잉여관측데이터의 수가 없는 경우는 품질제어 절차를 수행할 수 없기 때문에 이 사실을 경고하는 메시지를 출력 하고 처리를 종료함.
② 잉여관측데이터의 수가 1이며 과대오차가 검출되지 않 은 경우는 검출에 사용된 통계검정 결과를 출력하고 처리를 종료함.
③ 잉여관측데이터의 수가 1이며 과대오차가 검출되는 경 우는 검출은 이루어 졌으나 잉여 관측데이터의 수가 부족하 여 규명을 할 수 없기 때문에 이 사실을 경고하는 메시지와 통계검정 결과를 출력하고 처리를 종료함.
④ 잉여관측데이터의 수가 2 이상이며 과대오차가 규명되 지 않는 경우는 제1종 오류가 발생한 것으로 이 사실을 경 고하는 메시지와 계산된 내·외부 신뢰도를 출력하고 처리 를 종료함.
⑤ 잉여관측데이터수가 2이상이며 과대오차가 규명되는 경우는 적용단계에서 과대오차를 포함하고 있는 관측데이 터를 제거한 후 새로운 관측방정식과 분산-공분산 행렬을 구성한 후 최소제곱 추정을 실시함. 만약 2개 이상의 과대 오차가 포함된 경우라면 반복적인 처리가 필요하고 이를 위해서는 충분한 수의 잉여관측데이터가 확보되어야 하며 그렇지 않은 경우 앞선 경우와 마찬가지로 그 사실을 경고 하는 메시지와 계산된 내·외부 신뢰도를 출력하고 처리를 종료함.
3. 관측실험을통한 민감성및 성능분석
GPS 관측데이터에 포함된 과대오차를 제거하기 위한 품질 제어 절차의 통계검정에 미치는 요인들에 의한 영향을 살펴 보기 위한 민감성 분석과 본 연구에서 구현된 알고리즘의 성능을 평가하기 위하여 정지측위와 이동측위 실험을 실시 하였다. 관측데이터의 처리는 MATLAB으로 구현한 프로그 램을 사용하였으며 품질제어의 통계검정은 유의수준 5%, 검 정력 80%에 대해 실시하였다.
Xˆ=(ATQl–1A)–1(ATQl–1∆Lm)
그림 1. GPS 수신기위치추정흐름도
그림 2. 품질제어흐름도
3.1 민감성 분석
GPS 관측데이터에 포함되어 있는 과대오차의 규명을 위해 실시하는 가설검정의 과대오차 발견 능력을 나타내는 식 (15)의 내부신뢰도 ∆lm,i는 관측데이터의 분산-공분산행렬과 잔차의 분산-공분산행렬에 의해 계산된다. 이것은 내부신뢰 도가 계수행렬과 관측데이터의 분산-공분산 행렬의 변화에 큰 영향을 받는다는 것을 의미한다. 따라서 본 절에서는 잉 여관측데이터의 수, 위성의 기하구조 그리고 관측데이터의 분산-공분산행렬(즉, 통계모형)이 관측데이터 처리의 품질제 어에 미치는 영향을 내부신뢰도를 이용하여 분석하였다.
3.1.1 시험 데이터의 구성
시험 데이터는 정지관측을 통해 얻어진 데이터 중에 가장 많은 8개의 위성 관측데이터를 가지는 1개 에폭크를 표 1에 나타낸 바와 같이 시험목적에 맞도록 6개의 데이터로 편집 하였다. <시험I>은 잉여관측데이터수의 변화에 대한 영향을 살펴보기 위한 것으로 표에서 보이는 바와 같이 3개의 데이 터에 대한 위성의 기하강도를 나타내는 GDOP(Geometry
Dilution of Precision)은 2.0~2.2로 거의 동일하게 유지하도
록 편집하였다. <시험II>는 위성의 기하강도의 영향을 분석 하기 위하여 동일한 위성 관측수를 유지하면서 GDOP 값을
1.9~15.1로 큰 차이를 가지도록 3개의 데이터를 구성하였다.
<시험III>은 <시험I>의 3번째 데이터와 동일한 것을 사용하 여 식 (2)와 (3)의 두 가지 다른 통계모형을 이용하였다.
3.1.2 잉여관측데이터수의 영향
자유도인 잉여관측데이터의 수는 과대오차를 규명하여 제 거하기 위한 품질제어에 가장 중요한 영향을 미치는 요인으 로 이 영향을 분석하기 위하여 거의 동일한 위성의 기하강 도를 유지하면서 자유도가 2, 3, 4인 경우에 대하여 내부신 뢰도를 계산하여 표 2에 나타내었다. 표에 보이는 바와 같 이 잉여관측데이터의 수가 증가함에 따라 내부신뢰도인 MDB가 줄어들어 보다 작은 과대오차를 검출할 수 있음 보 여주고 있다. 이는 잉여관측데이터의 수가 증가함에 따라 각 위성 관측데이터의 추정된 잔차들 사이의 상관성이 낮아지 기 때문이다. 그리고 과대오차의 규명에서 잉여관측데이터의 수는 매우 중요하며 전체 관측데이터 중에 k개의 과대오차 가 존재한다면 이들 모두를 규명하기 위해서는 k+1의 잉여 관측데이터의 수가 필요하다.
3.1.3 위성의 기하구조의 영향
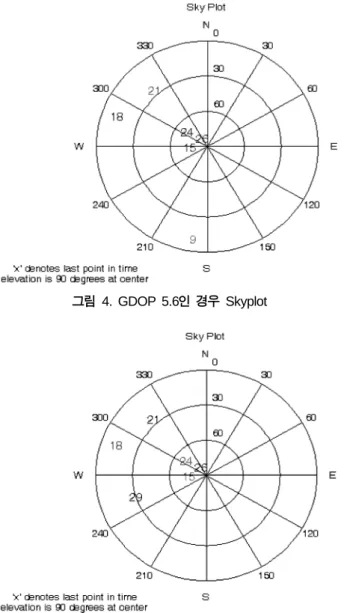
위성의 기하구조가 과대오차 규명의 성능에 미치는 영향을
분석하기 위하여 동일한 관측 위성 수를 유지하면서 그림 3~5와 같이 위성의 배치를 다르게 하여 내부신뢰도인 MDB 값을 계산하여 표 3에 나타내었다. 모든 경우에 포함된 위 성은 PRN 15, 24, 26으로 GDOP의 증가와 함께 MDB도 증가되어 규명할 수 있는 과대오차의 크기 또한 커지는 것 을 알 수 있으며 이는 위성의 기하구조는 GPS 수신기 위 치 추정의 정밀도뿐만 아니라 과대오차 검출 능력에도 큰 영향을 미친다는 것을 의미한다. 예를 들어 PRN 26 위성의 경우 GDOP이 1.9에서 15.1로 약 7배 증가함에 따라 MDB 또한 약 5배 증가하여 추정된 위치의 신뢰성 또한 저 하시킨다. 3가지의 위성 배치 중에서 경우1은 주위에 위성 신호의 전파에 장애를 일으킬 수 있는 방해물이 없는 양호 한 측위 환경이나, 경우2와 3은 고층 빌딩과 같은 대형 구
표 1. 시험데이터의구성
방 법 목 적 관측데이터 조건
시험I 잉여관측데이터수의 변화에 따른 영향
① 잉여관측데이터의 수: 2 (GDOP: 2.2)
② 잉여관측데이터의 수: 3 (GDOP: 2.1)
③ 잉여관측데이터의 수: 4 (GDOP: 2.0)
시험II 위성의 기하강도의 영향
(잉여관측데이터수: 2)
④ GDOP: 1.9
⑤ GDOP: 5.6
⑥ GDOP: 15.1
시험III 통계모형의 영향 ③ 잉여관측데이터수: 4 (GDOP: 2.0)
표 2. 관측잉여관측데이터의수에따른내부신뢰도(MDB) 변화
PRN 경우1
(잉여관측 데이터의 수: 2)
경우2 (잉여관측 데이터의 수: 3)
경우3 (잉여관측 데이터의 수: 4)
26 15.9 14.3 12.7
15 - - 12.6
24 13.9 13.3 12.2
10 - 13.1 12.9
29 17.4 16.3 16.0
08 24.7 18.0 17.4
02 27.7 25.7 25.7
21 17.6 17.5 17.5
그림 3. GDOP 1.9인경우 Skyplot
− 324 − 조물이 특정 방향으로부터 위성 신호 전파를 방해하는 경우 로 최근 가장 큰 GPS의 응용분야 중의 하나인 차량항법장 치를 도심지에서 사용하는 경우 빈번히 발생할 수 있다. 이 경우는 GPS 관측데이터만을 이용해서 포함된 과대오차를 규 명하기는 매우 힘들기 때문에 항법장치에 탑재된 수치지도 와 같은 부과정보를 이용해야 한다는 것을 표 3의 결과로 보여주고 있다.
3.1.4 통계모형에 따른 영향
관측데이터의 통계모형은 최소제곱법을 통한 미지벡터의 추정뿐만 아니라 과대오차 규명을 위한 통계검정에서도 매
우 중요한 역할을 담당한다. 식 (13)에 보이는 바와 같이 통계검정을 위한 통계값인 의 계산을 위한 분모인 잔차의 분산-공분산행렬이 식 (7)에 의해 계산되기 때문이다. 따라서 과대오차의 규명에서 확률론을 따라 발생하는 ‘제1종 오류’
와 ‘제2종 오류’를 최소화하기 위해서는 관측데이터의 정밀 도를 실제와 가깝게 나타내는 통계모형의 사용이 필수적이다.
본 연구에서는 추정에 사용되는 통계모형이 과대오차 규명 을 위한 통계검정에 미치는 영향을 분석하기 위하여 시험I의 3번째 관측데이터에 대해 식 (2)와 (3)에 의해 분산-공분산행 렬을 구성하여 내부신뢰도인 MDB를 계산하여 표 4에 나타 내었다. 위성의 고도각과 계산된 MDB를 같이 살펴보면 전 체적으로 두 경우들에서 MDB는 모두 고도각에 의존하여 변하는 것을 보여준다. 또한, ‘경우1’과 ‘경우2’를 비교해 보 면 ‘경우2’에서 MDB 값이 고도각에 더 민감하게 변하는 것을 볼 수 있다. 여기서 중요한 것은 MDB 크기의 비교가 아니라 어떤 모형을 사용하여 계산되어진 MDB가 보다 높 은 신뢰성을 가지는가를 판단하는 것이다. 이를 위하여 8개 의 위성 관측데이터 중에서 PRN2 위성에 35m의 과대오차 를 삽입하여 식 (13)을 이용하여 통계값 wi를 계산하여 표 4에 나타내었다. 이 경우 규명할 수 있는 가장 작은 MDB 는 ‘경우1’에서는 32.6m 그리고 ‘경우2’에서는 40.3m 이다.
따라서 이 결과에 의하면 여기서 부과된 35m 오차는 ‘경우 1’에서는 과대오차로 판정해야 하고 ‘경우2’에서는 판정할 수 없어야 한다. 그러나 두 경우에서 계산된 wi값은 표에서와 같이 2.780과 2.372로 모두 임계값 2.8에 비해 작아 과대오 차로 판정할 수 없어, ‘경우1’의 통계검정 결과는 MDB 값 과 일치하지 않는다. 따라서 MDB 값이 의미를 가지기 위 해서는 통계검정 결과와 일치해야 하기 때문에 ‘경우2’의 MDB 값이 보다 신뢰성을 가진다고 할 수 있다.
3.2 정지측위
3.2.1 관측데이터의 취득 및 처리
구현된 의사거리에 의한 GPS 단독측위 및 품질제어 알고 리즘을 실제 운영환경인 이동측위에 적용에 앞서 정지측위 를 실시하여 관측데이터의 처리를 통하여 그 성능을 평가하 였다. GPS 데이터의 취득은 그림6과 같이 한 대의 Novatel
GPS-720L 안테나에 신호분배기(signal splitter)를 이용하여
Novatel OEM4 엔진을 탑재한 SOKKIA GSR2600 측지측
량용 2주파 수신기와 항법용 1주파 SUPERSTARII 수신기 그림 4. GDOP 5.6인경우 Skyplot
그림 5. GDOP 15.1인경우 Skyplot 표 3. 위성의기하구조에따른내부신뢰도변화 경우 1(GDOP 1.9) 경우 2 (GDOP 5.6) 경우 3 (GDOP 15.1)
PRN MDB PRN MDB PRN MDB
26 9.6 26 15.4 26 49.8
15 9.6 15 16.2 15 18.2
24 9.4 24 13.3 24 28.5
08 77.2 21 26.6 29 30.8
09 75.5 09 104.6 21 25.8
18 54.4 18 28.4 18 22.9
표 4. 통계모형에따른내부신뢰도(MDB)와 wi값의변화
PRN MDB wi 위성의
경우1 경우2 경우1 경우2 고도각
26 16.1 10.0 0.298 0.501 78.8
15 16.0 10.4 1.059 1.635 70.7
24 15.5 10.4 1.508 2.298 65.6
10 16.4 15.4 0.178 0.199 51.0
29 20.4 26.2 2.470 1.540 25.2
08 22.1 24.8 2.185 1.549 25.0
02(+35m) 32.6 40.3 2.780 2.372 23.1
21 22.2 30.3 2.474 1.052 23.0
를 연결하여 동시관측을 수행하였다. GSR2600의 관측데이 터는 GPS 상시관측소와 연결하여 기선해석을 통해 정확한 수신기위치를 결정하였으며 본 연구에서 구현된 알고리즘의 위치추정 정확도 평가의 기준으로 사용하였고, 실제 데이터 처리에는 SUPERSTARII의 관측데이터를 이용하였다. 이것 은 본 연구에서 구현된 GPS 단독측위는 항법분야에서 주 로 사용되기 때문이다. 두 대의 수신기를 이용한 GPS 위 성의 관측은 저장간격 1초로 하여 총 4시간동안 실시하였 으며, 관측데이터는 모두 RINEX 형식으로 변환하였다. 특 히, 본 연구의 목적인 GPS 데이터처리에서 품질제어 알고 리즘의 성능을 평가하기 위하여 관측데이터 편집을 통하여
20~40m 크기의 과대오차를 무작위로 200개 삽입한 후, 본
연구에서 구현된 프로그램에 의해 품질제어 절차를 적용하 지 않는 경우와 적용하는 경우로 나누어 데이터처리를 실시 하였다.
3.2.2 결과 분석
그림 7과 8은 두 경우에 대해 추정된 안테나의 수평좌표 를 도시한 것이다. 그림 7의 경우 인위적으로 과대오차가 삽입된 경우에서 추정좌표에 편의가 발생하고 있음을 보여 주고 있다. 이에 반해 그림 8은 품질제어 절차에 의해 과대 오차의 대부분이 적절하게 규명되어 제거되었음을 명확하게 보여주고 있으나 일부분에서 여전히 추정좌표에 과대오차의 영향이 남아 있음을 볼 수 있다. 이를 보다 명확하게 살펴 보기 위하여 데이터처리 출력파일을 점검한 결과 총200개의 중에서 148(74%)개의 과대오차가 품질제어 절차를 통해 제 거되었고, 나머지 52(26%)개는 품질제어를 통해 규명되지 못한 채로 남아있음을 확인하였다. 이것은 과대오차 규명을 위한 통계검정에서 검정력을 80%로 사용하여 통계검정의
‘제2종 오류’가 발생할 확률을 20% 가지고 있기 때문이다.
그러나 실제결과는 26%로 이것은 사용된 통계모형에 의해 기인된 것으로 보인다. 비록 본 연구에서 현실적인 것으로 알려진 ‘위성 고도각에 따른 모형’을 사용하였으나 이것 또 한 관측데이터의 상관성인 공분산을 고려하지 않은 것으로 완벽하지 않기 때문이다. 물론 ‘제2종 오류’를 줄이기 위해 서 검정력을 높일 수 있으나, 이 경우는 ‘제1종 오류’가 증 가하게 된다.
본 연구에서 구현된 품질제어 알고리즘의 적용 여부가 GPS 수신기 위치 추정의 정확도에 미치는 영향을 분석하기
위하여 GSR2600 수신기와 GPS 상시관측소 관측데이터를 이용한 기선해석의 결과로 얻어진 좌표와의 차이를 계산하 여 그림 9에 도시하였다. 그림에서 좌표차이의 급격한 증가 는 과대오차에 기인한 것으로 품질제어 절차를 통해 제거되 어 그 정확도가 향상을 이룰 수 있었음을 확인할 수 있다.
표 5는 계산된 좌표차의 통계값을 나타내고 있으며 과대오 차의 적절한 제거를 통해 그 정확도가 향상된 것을 확인할 그림 6. 신호분배기에의한수신기의연결
그림 7.정지측위에서품질제어를실시하지않은경우수평위치 변화
그림 8. 정지측위에서품질제어를실시한경우수평위치변화
그림 9. 기선해석결과와좌표차이
− 326 − 수 있으나 그 증가의 정도는 크지 않다. 이것은 데이터 처 리에 사용된 데이터의 수(14,400)에 비하여 과대오차 개수 (200개)가 상대적으로 매우 작기 때문이다.
3.3 이동측위
3.3.1 관측데이터의 취득 및 처리
본 연구에서 구현한 GPS 의사거리를 이용한 단독측위와 품질제어 알고리즘의 성능을 평가하기 위하여 실제 운영 환경에 해당하는 차량을 이용하여 이동측위를 실시하였다.
정지측위의 경우와 동일하게 차량에 설치된 하나의 안테나 에 측지측량용 2주파 GSR2600 수신기와 항법용 저가
SUPERSTARII 수신기를 신호분배기에 연결하여 설치하였다
. 또한 추정 수신기 좌표의 정확도 평가에 사용할 기준좌표 를 결정하기 위하여 측지측량용 수신기인 GSR2700IS 수신 기를 기준국으로 설치하여 동시관측을 수행하였다. 이동측위 실험에서 데이터는 저장간격 1초로 하여 총 30분간 관측이 이루어졌다.
GSR2700IS와 GSR2600 수신기에서 관측된 데이터는 캐
나다 Waypoint社의 GrafNav7.0 소프트웨어에 의해 반송파 상대측위 모드로 처리하여 1~3cm 수준의 정확도로 이동 차 량의 위치를 결정하였다. SUPERSTARII에 의한 관측데이터 는 본 연구에 구현된 알고리즘의 성능 평가에 사용하기 위 하여 데이터편집을 통해 20~40m 크기를 가지는 150개의 과대오차를 무작위로 삽입한 이후 본 연구에서 구현한 프로 그램에 의해 품질제어 절차를 적용하지 않는 경우와 적용하 는 경우로 나누어 데이터처리를 실시하였다.
3.3.2 결과분석
그림 10과 11은 품질제어 알고리즘을 적용하지 않은 경 우와 적용한 경우에 대해 추정된 차량의 궤적을 1:1,000 수치지도 상에 도시한 것이다. 두 그림을 비교해 보면 품질 제어를 실시하지 않은 경우 인위적으로 삽입된 과대오차가 추정된 차량위치에 비교적 큰 크기에의 편의를 발생시켰으 며, 품질제어 절차를 적용한 경우는 대부분의 과대오차를 제거할 수 있음을 알 수 있다. 데이터처리 출력 파일을 확 인한 결과 인위적으로 부과된 총 150개의 과대오차 중에서 125개(83.3%)를 규명하여 최종 차량위치 추정에 제외하였으 며, 나머지 25개(16.7%)는 규명되지 못한 채로 남아 있었 음을 확인하였다. 이것은 앞선 정지측위에서와 마찬가지로 통계검정의 ‘제2종 오류’로 검정력을 80%로 사용하였기 때 문이다.
본 연구에서 구현된 품질제어 알고리즘의 적용 여부가 GPS 수신기 위치 추정의 정확도에 미치는 영향을 분석하기 위하여 GrafNav7.0에 의해 GPS 반송파 상대이동 측위결과 와 추정좌표 차이를 계산하여 그림 12에 도시하였다. 그림에
서 품질제어 알고리즘을 적용하지 않은 경우에 발생하는 커 다란 좌표의 불일치는 제거되지 않은 과대오차의 영향으로 볼 수 있으며, 이들은 품질제어 알고리즘을 통해 대부분 제 거되었음을 그림을 통해 확인할 수 있다. 표 6은 계산된 좌 표차의 통계값을 나타내고 있으며 과대오차의 적절한 제거 를 통해 그 정확도가 향상된 것을 확인할 수 있다. 그림 13은 처리에 사용된 데이터의 관측위성수의 변화와 내·외 부 신뢰도를 도시한 것으로 이를 통하여 추정된 수신기 좌 표의 신뢰성을 확인할 수 있다.
표 5. 기선해석결과와좌표차의통계값
수평성분 수직성분
미적용 적용 미적용 적용
평균 3.22m 3.14m 7.80m 7.47m
표준편차 2.93m 2.62m 8.36m 7.11m
최대 38.94m 15.64m 104.31m 63.70m
그림 10. 품질제어를실시하지않은경우차량의궤적
그림 11. 품질제어를실시한경우차량의궤적
그림 12. 이동측위에서기준좌표와차이
4. 결 론
본 논문은 GPS 의사거리 관측데이터를 이용한 단독측위에 서 발생하는 과대오차를 통계검정기법을 통해 규명하여 수 신기 위치추정의 정확도와 신뢰성을 향상시키기 위한 연구 로 이론과 실험을 병행 실시한 결과 다음과 같이 요약할 수 있다.
첫째, GPS 의사거리를 이용하는 단독측위의 수학적 모형 화 방법 및 최소제곱법에 의한 위치추정과 관측데이터에 포 함된 과대오차를 처리하기 위하여 ‘검출’, ‘규명’, ‘적용’의 세단계로 구성된 품질제어 알고리즘을 연구하고 과학기술용 계산 프로그램인 MATLAB에 의해 구현하였다.
둘째, GPS 관측데이터의 과대오차 규명에 영향을 미치는 요인들인 관측의 잉여관측데이터의 수, 위성의 기하구조 그 리고 통계모형에 대한 분석을 내부신뢰도 계산을 통해 실시 하였다. 그 결과 위치 추정 정밀도 향상 이외에 보다 작은 과대오차를 규명하여 추정위치의 신뢰성을 향상하기 위해서 는 많은 잉여관측데이터의 수와 높은 위성의 기하강도가 필 요함이 확인되었다. 그러나 잉여관측데이터수와 위성의 기하 구조는 사용자에 의해 제어될 수 없기 때문에 수신기 주변
의 장애물에 의해 특정방향으로부터 위성신호가 단절되는 경 우는 GPS 추정위치의 정확성과 신뢰성을 확보하기 위해 수 치지도와 같은 다른 데이터와 통합하여 데이터 처리가 이루 어져야 한다. 통계모형은 정확한 위치추정뿐만 아니라 과대 오차 규명의 통계검정에 영향을 미치는 중요한 요소로 관측 데이터의 정밀도를 보다 실질적으로 나타낼 수 있는 모형의 사용은 그 성능을 현실화할 수 있었다.
셋째, 구현된 알고리즘의 성능을 평가하기 위하여 정지 및 이동측위 관측실험을 실시하고 그 결과를 분석한 결과 관측 데이터에 포함된 과대오차 대부분이 규명되어 수학적 모형 에서 제외함으로써 전체적인 측위의 정확도 향상을 이룰 수 있었으며 이를 통하여 추정좌표의 신뢰성을 향상시킬 수 있 었다.
감사의글
본 연구는 국토해양부 첨단도시기술개발사업-지능형국토정 보기술혁신 사업과제의 연구비지원(07국토정보C02)에 의해 수행되었으며 연구비지원에 사의를 표합니다.
참고문헌
서영진, 주영은, 조흥묵(2004) 인터넷 기반의 GPS Quality Control 시스템 개발, 한국측량학회추계학술발표회논문집, 한 국측량학회, pp. 65-71.
윤홍식, 이동하, 이영균, 조재명(2006) GPS 데이터 품질관리 프 로그램의 개발, 한국측량학회지, 한국측량학회, Vol. 24, No.
1, pp. 9-18.
Barada, W.W. (1968) A testing procedure for use in geodetic net- work, Netherlands Geodetic Commission Publication on Geod- esy, No. 5, p. 97.
Cross, P.A. (1983) Advanced Least Squares Applied to Position Fixing, Working Paper No. 6, Department of Surveying, North East London Polytechnic, p. 205.
Cross, P.A., Hawksbee, D.J., and Nicolai, R. (1994) Quality mea- sures for differential GPS positioning. The Hydrographic Jour- nal. No. 72. pp. 17-22.
Leick. A. (2004) GPS Satellite Surveying, John Wiley & Sons. p.
611.
Ryan, S. and Lachapelle, G. (2000) Impact of GPS/Galileo Integra- tion on Marine Navigation, ION Annual meeting, pp. 721-731.
Salzmann, M.A. (1994), A real-time quality control procedure for use in integrated navigation system, The Hydrographic Jour- nal, No. 72, pp. 25-30.
Tiberius, C.C.J.M. (1998) Quality control in positioning, The Hydrographic Journal, No. 90, pp. 3-8.
(접수일: 2009.1.5/심사일: 2009.1.28/심사완료일: 2009.1.28)
그림 13. 위성수와내·외부신뢰도
표 6. 기선해석결과와좌표차의통계값
수평성분 수직성분
미적용 적용 미적용 적용
평균 7.94m 7.71m 11.08m 9.79m
표준편차 3.81m 2.94m 6.20m 2.52m
최대 46.21m 17.89m 57.62m 21.53m