1. 서 론
녹색성장이 미래 국가 발전 전략으로 떠오르기 시작하면서 녹색성장 실현을 위한 핵심 수단으로 서 Green IT 의 중요성이 강조되고 있다.
녹색성장 전략은 대부분 온실가스 발생을 억제 하거나 포집할 수 있는 기술에 집중하고 있으며, 필연적으로 온실가스 배출을 동반하는 에너지 사
용을 대체하거나 억제하는 것을 목적으로 한다.
온실가스 배출을 줄이려면 근본적으로 신재생에 너지를 개발하여 화석연료를 대체해야 한다 이. 를 위해서는 신재생에너지 개발뿐만 아니라 사회 전반의 에너지 효율성을 향상하여 낭비요인을 제 거하기 위한 노력이 필요하다. 아울러 신재생에 너지의 원활한 이용을 지원하는 IT기반 구축도 함께 고려될 필요가 있다.(1)
Hong(2)은 위와 관련된 Green IT 각 세부 분야 의 전문가들을 대상으로 개방형 설문조사를 실시 하여, Green IT 5대 서비스의 개념을 정의하고, 각각의 요소들의 중요도를 분석하였으며 이 서, 학술논문
< >
DOI http://dx.doi.org/10.3795/KSME-A.2012.36.11.1433
ISSN 1226-4873실내 위치기반 서비스 구현을 위한 센서 시스템 개발
차 주 헌* · 이 경 호**
국민대학교 기계시스템공학부 국민대학교 대학원 기계설계학과
* , **
Development of Sensor System for Indoor Location-Based Service Implementation
Joo-Heon Cha* and Kyung Ho Lee**
* School of Mechanical Systems Engineering, Kookmin Univ.,
** Dept. of Mechanics and Design, Graduate School of Kookmin Univ.
(Received May 2, 2012 ; Revised July 20, 2012 ; Accepted July 20, 2012)
Key Words: Smart Grid(스마트 그리드), Presence Sensor(재실센서), Building Energy Management System
건물 에너지관리 시스템 실내 위치기반 서비스
( ), Indoor Location-Based Service( )
초록 본 논문에서는: Building Energy Management System(BEMS) 구현을 위해 재실자의 위치 및 인원정“ 보” 에 기반을 둔 실내 위치 기반 서비스 및 그를 위한 센서 시스템에 대하여 제안한다 본 논문에서. 제안한 센서 시스템에는 열에너지 그 자체를 감지 할 수 있는 서모파일 센서와 비 접촉 방식으로 대상 까지의 거리를 얻어낼 수 있는 초음파센서 그리고 이를 제어하고 구동할 수 있는 기구 및 동작부가 포, 함된다 본 시스템은 적절한 크기의 방 전체를 감시할 수 있도록. , 360° 회전과 틸팅이 가능한 구조로 되 어있어 실내공간내의 재실자의 인원 및 위치를 동시에 파악할 수 있다 또한 무선통신 기술인 블루투, . 스 모듈을 통해 빌딩 관리자나 스마트 홈 서버와의 통신이 가능하도록 되어 있어 빌딩내의 조명이나, 공조시스템을 자동으로 제어 관리하게 함으로써 전체 에너지 절약을 가능케 한다 마지막으로 측정 데, . 이터 검증을 위한 실환경 실험을 통해 본 연구에서 제안한 시스템의 효용성 및 타당성을 확인한다, . Abstract: This paper introduces a sensor system based on indoor locations in order to implement the Building Energy Management System. This system consists of a thermopile sensor and an ultrasonic sensor. The sensor module is rotated by 360o and yawed up-and-down by two electric motors. Therefore, it can simultaneously detect the number and location of the inhabitants in the room. It uses wireless technology to communicate with the building manager or the smart-home server, and it can save electric energy by controlling the lighting system or heating/air conditioning equipment automatically. We also demonstrate the usefulness of the proposed system by applying it to a real environment.
§ 이 논문은 2012 년도 대한기계학회 동역학 및 제어부문 춘계학술대회 (2012. 4. 11.-13., 제주 KAL 호텔 발표논문임 ) Corresponding Author, [email protected]
2012 The Korean Society of Mechanical Engineers
Ⓒ
동적인 시스템이다 즉 건물 공간내 활동인원에. 기반을 둔 에너지 실시간 수요의 정확한 집계와 분석이 필요하며 이를 위해 건물 내에서 거주, 하는 “재실자의 위치 및 인원 정보 를 수집하기” 위한 센서시스템 개발이 선행되어야 한다.
재실자의 위치와 인원정보를 파악하는 재실정 보 시스템에 관한 연구는 스마트 태그 시스템과 비접촉식 센서 시스템으로 나누어볼 수 있다.
스마트 태그 시스템은 개인 인증 및 건물 보안 시스템으로 많이 사용되고 있는 스마트카드 시스
템(3,4)과 RSSI(Received Signal Strength Indication)(5)
기반 시스템으로 나뉜다 그러나 스마트태그 기. 반 시스템과 RSSI 기반 시스템은 노드 수의 불필 요한 증가와 실제 성능지수라는 양립할 수 없는 두 조건 속에서의 적절한 Trad-off가 필요하며,(6) 몸에 부착해야 하는 불편한 단점을 지니고 있다.
비접촉식 센서시스템은 화장실 및 현관 등의 센서 로 많이 사용되고 있는 PIR(Pyroelectric IR)(7,8) 기반 의 동작감지 시스템과 서모파일(Thermopile)(9~12) 기반 의 열감지 센서 비전센서를 이용한 비디오카메라, 시스템 등으로 나뉜다 그러나 이러한 센서 시스템. 들 역시 온도변화에 따른 인체 감지 주변, 환경의 실내온도에 의한 오작동 카메라에 의한 사생활, 침해 등의 문제점들을 포함하고 있다.
Fig. 1 Sensor unit
시스템 구성 2.
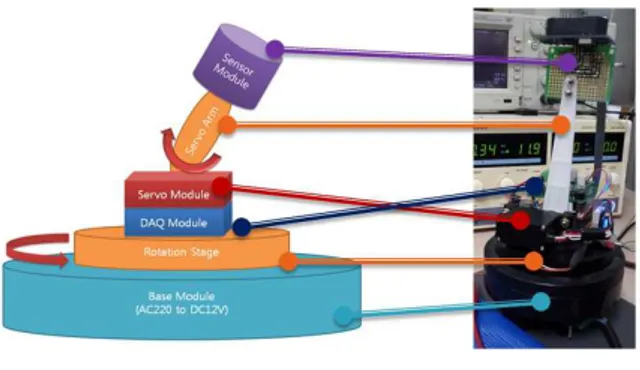
본 시스템은 크게 하드웨어와 소프트웨어를 포 함하는 센서유닛과 GUI를 포함하는 검증유닛으 로 나눌 수 있다 센서모듈은 최소단위의 생활 활. / 동 공간인 “방” 마다 설치하게 되며 검증모듈은, 홈 서버 및 건물 모니터링 센터에 위치한다.(13)
센서유닛의 하드웨어 2.1
센서유닛의 하드웨어는 크게 3가지로 구성된 다. 360° 회전과 틸팅(Tilting)이 가능하며 선 꼬, 임 문제가 없이 전력 공급이 가능한 베이스 모듈 과 서모파일 센서와 초음파 센서로 구성된 센서, 모듈 그리고 데이터 처리와 통신을 위한 블루투, 스를 포함한 DAQ 모듈이 그것이다 전체적인 센. 서유닛의 구성도는 Fig. 1과 같다. AC/DC 컨버터 가 포함된 전원부(Power Supply) 위에 선 꼬임 문 제없이 전력 공급이 가능한 회전 스테이지
가 위치하고 다시 그 위에 (Rotation Stage) , DAQ 모듈과 서보(Servo)모듈이 장착되며, 최종적으로 서보(Arm)을 거쳐 센서유닛이 장착된다.
센서유닛의 소프트웨어 2.2
센서유닛의 소프트웨어는 다음과 같이 크게 4 가지로 구성된다 열 데이터 감지를 위한 서모파. 일 센서의 후처리 알고리즘(14)과 거리 데이터 감 지를 위한 초음파 센서의 후처리 알고리즘 방위, 각 데이터 감지를 위한 Compass 센서의 후처리 알고리즘 그리고 최종적으로 재실자의 위치와, 인원정보 판단하기 위한 점유그리드(Occupancy 알고리즘이다 점유그리드는 재실자의 위치
Grid) .
를 감지하기 위해 임의로 설정한 감지 영역이다.
스테이지 모듈의 초기화를 거쳐 방위각 데이터 를 얻어내고 센서모듈 초기화를 통해 센서 레퍼, 런스 데이터 획득 및 방위각 보정을 동시에 진행 한다 초기화가 끝난 데이터들은 의미가 없는 미.
Fig. 2 Occupancy grid
가공 데이터에서 의미가 있는 백분위 데이터로 변환되어 인체감지 및 점유 그리드 구성을 위한, 센서 데이터로 사용된다.
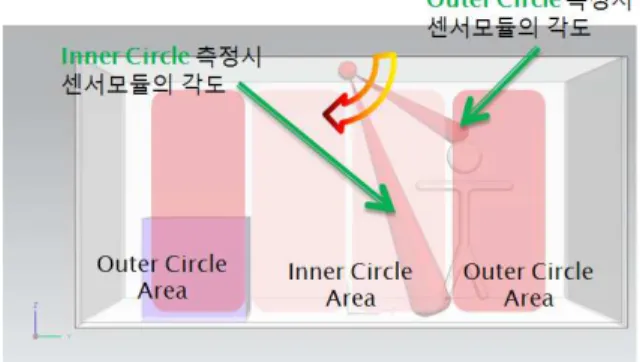
점유그리드는 Fig. 2와 같이 평면 공간에서 얻 을 수 있는 데이터들의 위치를 구분 짓기 위해 공간을 여러 개의 비교적 균일하고 잘게 쪼개어 낸 영역을 의미한다 본 연구에서는 센서로 측정. 할 실내의 공간 영역을 Inner Circle 부분의 그리 드(Grid) 8개와 Outer Circle 부분의 그리드 16개 로 나누어서 총 24개 영역에서 재실정보를 수집 한다 각 그리드의 외측길이는. 60cm 정도로 동일 하며 디버깅을 위해 가운데 영역을 포함하여 직, 경 3m 의 원형 공간을 24등분하여 정밀한 실내 위치 측위를 시도한다 본 센서 시스템은 회전과. 틸팅으로 감지할 수 있는 최대영역을 3m로 설정 하였다.
원형으로 마킹한 부분이 자북 설치 위치에서의( 센서 최대값 이고 실제 센서유닛이 설치 위치에) , 서 보면 진북에서 약 45°정도 틀어져 있는 상태 다. Outer Circle의 그리드 한 칸의 각도는 360°를
으로 나눈 이며 의 그리드
16 22.5° , Inner Circle
한 칸의 각도는 360°를 8로 나눈 45°이다 해당. 그리드에는 일반적인 체격을 지닌 성인남성 1명 이 겨우 들어갈 수 있을 정도이므로 한 그리드, 안에 두 명 이상의 사람이 들어갈 경우는 배제하 고 연구와 실험을 진행하도록 한다.
센서모듈의 틸팅 각도에 따라 센서유닛이 감시 하는 영역이 결정되게 되는데, Outer Circle 측정 시의 각도가 Inner Circle을 측정할 때 보다 더 크 게 된다 센서 모듈의 틸팅 각도는 각 해당 그리. 드에 키 150cm 이상의 일반적인 성인이 위치하 였을 때 눈 위쪽에서 정수리까지를 측정할 수, 있도록 설정하였다.
Fig. 3 Occupancy grid, inner and outer circle 외부에 노출된 인체부위 중에서 눈 위쪽에서 정수리 부분까지가 가장 표면온도가 높으며 바, 닥으로부터의 고도 또한 제일 높다. Fig. 3에서 알 수 있듯이 동일한 대상자이라 하더라도 Inner 에서 측정할 경우에 모듈까지의 거리가 가 Circle
깝기 때문에 서모파일 데이터의 준위는 높게 출, 력될 것이고 초음파 데이터의 준위는 낮게 출력, 될 것이다 역으로. Outer Circle에 속한 그리드에 서 측정할 때에는 센서모듈까지의 거리가 상대적 으로 멀어지기 때문에 서모파일 데이터의 준위는 낮게 출력될 것이고 초음파 데이터의 준위는 높, 게 출력될 것이다.
베이스모듈의 스테이지를 지속적으로 회전하면 서 현재의 방위각을 측정하여 각 방위각에 맞는, 그리드로 재분류하는 작업을 수행한다 이를 통. 해 기존 360° 타입 PIR의 가장 큰 문제점이었던 기계적 기구적 노이즈 누적문제- (11)를 해결할 수 있었다 기어나 모터의 동작에서 오는 오차와 전. 혀 무관하게 방위각에 기반을 둔 판단 알고리듬 으로 현재 센서모듈이 바라보고 있는 방향을 거 의 정확하게 측정할 수 있었다.
재실 감지 알고리즘 2.3
전체 센서유닛 구동 및 재실 알고리즘은 Fig. 4 와 같다 전원이 들어오면 최초에 센서 유닛이. 스스로 스테이지를 초기화하여 현재 설치된 위치 에서의 방위각을 자동으로 초기화시켜 0°~360°
의 방위각으로 나누고 점유그리드를 설정하게, 된다 이후에 재실 감지를 위한 초음파 센서와. 서모파일 센서의 초기화가 이루어지고 현재 온도 에서의 기준치가 측정이 된다 이후 검증시스템. 인 GUI 와 연결확인 작업이 이루어지고 초기화, 완료 대기시간 및 최종 시스템 초기화 시간인
Fig. 4 Presence algorithm
초가 지나고 나면 본격적인 재실 감지가 이루 100
어진다 이후 전환점에 센서 모듈이 도달하게 되. 면 Inner Circle에서 Outer Circle로의 감지영역을 차례로 스캐닝하여 재실자의 위치와 인원 정보를 추출한다 계속하여 센서 시스템은 회전과 틸팅. 을 반복하면서 동일한 동작을 수행하게 된다.
시스템 구현 3.
실험 환경 구현 3.1
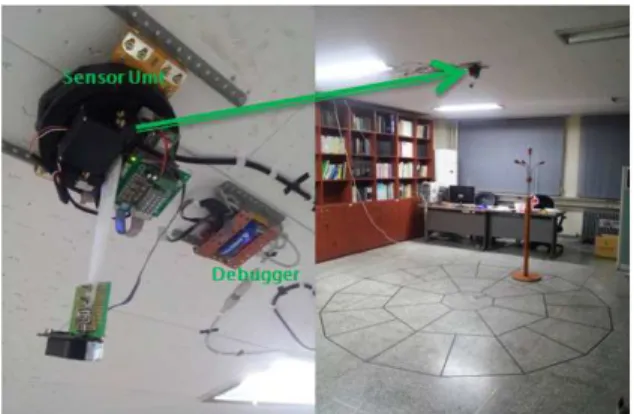
본 센서 시스템을 실제 환경에서 검증하기 위 해 Fig. 5와 같이 테스트베드를 구성하였다 내부. 영역인 재실 그리드는 45° 각도에 60cm의 외측 길이를 가지고 있으며 외부영역의 재실 그리드, 는 22.5° 각도에 70cm 외측 길이를 가지고 있다. 본 실험에서는 단순히 실험의 편의성을 위하여 측정영역을 두 영역으로 분리 하였을 뿐이고 실, 제로 센서사양을 고려할 경우 최대, 6m 정도의 원형 공간을 감지할 수 있다.
시스템 소프트웨어 구현 3.2
방위각에 근거한 점유그리드의 설정이 끝났기 때문에 그리드의, Inner 와 Outer Circle의 인식 기 준 데이터의 축출작업을 수행하였다 그리드에서. 의 경계 데이터가 인식률 저하의 주원인이기 때 문에 경계에서 가까운 쪽부터 데이터를 제거해 나가는 방식으로 기준 데이터를 추출했다.
는 구분의 편의상 데이터들을 까지
Fig. 6 300%
확대시켜 놓은 그래프로서 그리드에서의 인체감 지 데이터를 추출한 것이다 앞의 첫 번째 피크. 그래프는 Inner Circle에서의 인식 기준이며 뒤의,
Fig. 5 Test bed and occupancy grid
Fig. 6 Presence data extract
두 번째 세 번째 피크 그래프는, Outer Circle에서 의 인식 기준이다.
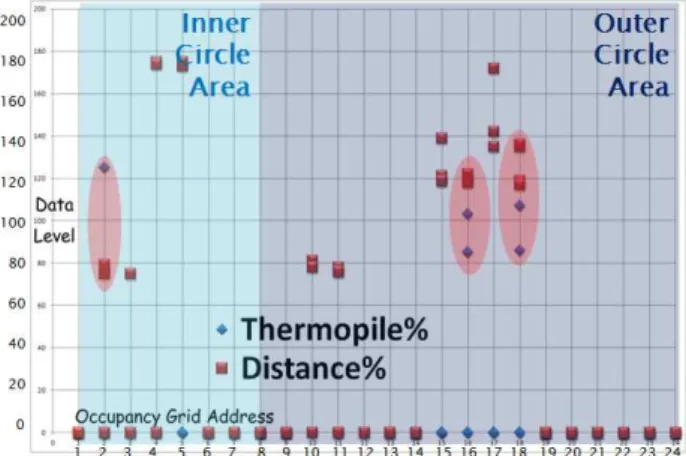
은 점유그리드 주소별 데이터 준위의 분 Fig. 7
포 그래프를 나타낸 것으로 일반적으로 서모파, 일 데이터가 최고치에 있을 때 거리 데이터는 오 히려 준위가 낮아지는 것을 확인할 수 있는데, 해당 지점이 바로 어깨 부위에서 정수리 쪽으로 센서 영역이 넘어가는 지점이다 머리 부분에의. 고도가 제일 높고 온도 또한 노출된 신체에서, 가장 높기 때문에 서모파일 데이터가 가장 높게, 나오고 거리 데이터 또한 주변부보다 더 낮게, 측 정 이 된 다. 이 러 한 특 성 은 초 음 파 센 서 의 특성 때문에 나타나는 것으 FOV(Field of View)
로 물리적인 방법으로는 해결할 수가 없기 때문, 에 콤파스 센서의 데이터 점핑현상과 마찬가지로 소프트웨어 필터를 이용하여 부적합하다고 판단 되는 부분의 데이터들을 Cut-off 시키는 작업을 수행함으로써 신뢰성있는 데이터를 얻을 수 있, 었다 이를 기준으로. 1차 데이터 변환 및 축출
Fig. 7 Thermopile and distance data at each circle area
작업을 수행했다.
에서 영역에서
Fig. 7 Outer Circle Inner Circle 영역과 비교하여 데이터 역전현상이 일어난 것을 확인할 수 있는데 이를 기준으로 최종 재실감지, 데이터를 만들어서 각 그리드에서의 재실정보 데 이터가 올바르게 추출됨을 알 수 있다.
3.3 GUI 구성
은 에 의해 프로그래밍 제작된
Fig. 8 Labview
를 나타낸 것이다 메뉴에서 제어 는
GUI . (Control)
센서유닛과 검증유닛간의 접속 상태를 설정하고 유지 상태를 표시하고 초기화, (Initialize)는 센서유 닛의 초기화 상태를 디스플레이 해준다 재실정. 보(Presence Information)는 센서유닛으로부터 3자 리의 스트링 데이터를 전송받아 재실자의 위치정 보와 인원정보를 표시해준다.
시스템 실험 4.
본 시스템의 타당성 검증을 위해 실제 환경에, 서 다음과 같이 기본실험과 몇 가지 특수한 경우 를 대상으로 수행하였다.
기본실험은 다수의 인체를 정상적으로 감지할 수 있는가에 관한 기본실험이다 그림자 효과 극. 복실험은 Inner Circle에 위치한 인체로 인해 에 위치한 인체가 정상적으로 감지되 Outer Circle
지 않는 그림자 효과에 관한 시나리오 가정 실험 이다 혼합 타겟의 위치 및 종류 인식실험은 가. 까운 Grid 에 인체와 비인체가 혼재되어 있을 때 이를 시스템에서 정확하게 분간할 수 있는가에 관한 시나리오 가정 실험이다.
Fig. 8 Graphic user interface
Fig. 9 Basic test
Fig. 10 Shadow effect
Fig. 11 Human body detection
먼저 Fig. 9은 기본실험으로서 키, 180cm 이하, 몸무게 80kg 이하의 평범한 체격의 남성 4명이
한 인체가 정상적으로 감지되지 않는 이와 같은 그림자 효과 문제를 해결한 결과를 보여준다 이. 는 천정에 설치되어 있는 센서 시스템의 스캐닝 범위가 뒤에 있는 대상까지 감지할 수 있기 때문 에 가능한 것이다.
마지막으로 Fig. 11은 혼합 타겟의 인식 실험으 로, 인접한 그리드에 인체와 비인체가 혼재되어 있을 때 시스템이 정확하게 인체만을 감지할 수, 있음을 알 수 있다 이는 비인체의 경우에는 열. 원이 없으므로 거리 데이터는 존재하나 서모파, 일 데이터가 검출되지 않으므로 바로 감지할 수 있는 것이다.
5. 결 론
본 논문에서는 몸에 장착하는 불편함이나 카메 라에 의한 사생활 침해의 우려가 없고 주변 실, 내온도에 영향을 받지 않으며 재실자의 위치와, 인원 정보를 정확히 획득할 수 있는 새로운 센서 시스템을 제안하고 그 구성요소인 기구부와 인, 식 알고리즘을 포함한 센서유닛과 사용자에게 그 재실자의 정보를 알려주는 검증유닛의 설계 및 제작을 완료하였다.
마지막으로 측정 데이터의 검증을 위한 다양한 실제 실험을 통해 본 연구에서 제안한 센서 시, 스템의 효용성 및 타당성을 확인하였다.
특히 복수의 센서 조합에 의해 이동하는 인체 뿐만 아니라 가만히 머무르고 있는 인체도 감지 할 수 있었으며, 기존센서의 한계였던 고온 상황 에서의 인체와 비인체에 대한 감지 또한 초음파 센서와 온도적응 알고리듬을 이용하여 극복했다.
그 외에 그림자 효과의 극복 회전에 의한 스테, 이지의 기계적 오차 해결 등을 확인하였다.
후 기
본 연구는 2012년도 국민대학교 교내연구비와
(2) Hong, S. G., Park, S. H., Jang, D. H. and Jeon, J. S., 2010, "Roles of IT in the Green Growth Strategy: Priority Setting on Green IT Infrastructures and Services," Journal of Cyber Communication Academic Society, Vol. 27, No. 3, pp. 265~300.
(3) Want, R. and Hopper, A., 1992, "Active Badges and Personal Interactive Computing Objects," IEEE Transactions on Consumer Electronics, Vol. 38, No.
1, pp. 10~20.
(4) Ward, A., Jones, A. and Hopper, A., 1997, "A New Location Technique for the Active Office,"
IEEE Personal Communications, Vol. 4, Issue 5, pp. 42~47.
(5) Hassan, N. S. A., Wahab, N. H. A., Ariffin, S.
H. S., Fisal, N., Latiff, L. A., Abbas, M. and Neng, C. K., 2010, "An Indoor 3D Location Tracking System Using RSSI," IEEE Signal-Image Technology and Internet-Based Systems, 2010 Sixth International Conference on, pp. 323~328.
(6) Lee, M. S. and Moon, S. J., 2008, "Problem of old Indoor Location Awareness System and New Location Awareness System Proposal," Journal of the Korean Society for Internet Information, Vol. 9, No. 1, pp. 103~106.
(7) Zappi, P., Farella, E. and Benini, L., 2010,
"Tracking Motion Direction and Distance with Pyroelectric IR Sensors," IEEE Sensors Journal, Vol. 10, No. 9, pp. 1486~1494.
(8) Kim, H. H., Ha, K. N., Lee, K. C. and Lee, Suk, 2007, "Performance Index for Sensor Arrangement of PIR Sensor-based Indoor Location Aware System," Journal of the Korean Society for Precision Engineering, Vol. 24, No. 6, pp. 37~44.
(9) Linzmeier, D. T., Skutek, M., Mekhaiel, M. and Dietmayer, K. C. J., 2005, "A Pedestrian Detection System Based on Thermopile and Radar Sensor
Data Fusion," IEEE Information Fusion, 2005 8th International Conference on, pp. 1272~1279.
(10) Linzmeier, D. T., Skutek, M., Abay, T. and Dietmayer, K. C. J., 2004, "Gridbased Optimal Sensor Arrangement within a Sensor Array for 2-d Position Estimation," in SPIE European Symposium on Optics/Photonics in Defence and Security, London, England.
(11) Yoshiike, N., Morinaka, K., Hashimoto, K., Kawaguri, M. and Tanaka, S., 1999, "360°
Direction Type Human Information Sensor," Science Direct, Sensors and Actuators, Vol. 77, Issue 3, pp.
199~208.
(12) Hashimoto, K., Tsuruta, T., Morinaka, K. and Yoshiike, N., 2000, "High performance human information sensor," Sensors and Actuators, Vol 79, pp. 46~52.
(13) Lim, H. J., Kang, J. H. and Yoo, J. J., 2010,
"Ubiquitous Sensor Network System interworking to BEMS," Journal for Korean Institute of Information Scientists and Engineers, Vol. 37, No. 2, pp. 1~5.
(14) Lee, K. and Cha, J.-H., 2011, "Development of Temperature Adaptation Presence Sensor," Korean Society for Precision Engineering 2011 Spring Conference, pp. 279∼280.