This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons.
org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
https://doi.org/10.12673/jant.2019.23.5.352 Received 23 September 2019; Revised 10 October 2019 Accepted (Publication) 28 October 2019 (30 October 2019)
*Corresponding Author; Joo-no Sur Tel: +82-51-410-5347
E-mail: [email protected]
J. Adv. Navig. Technol. 23(5): 352-360, Oct. 2019
불확실성이 포함된 무인잠수정의 도킹 평가 알고리즘
Docking Assessment Algorithm for AUVs with Uncertainties
천 승 재
1· 서 주 노
2*· 정 성 훈
21한국해양대학교 제어계측공학과
2한국해양대학교 산업기술연구소
Seung-jae Chon
1· Joo-no Sur
2*· Seong-hoon Jeong
21Department of Control and Instrumentation Engineering, Korea Maritime and Ocean University, Busan 49112, Korea
2Research Institute of Industrial Technology, Korea Maritime and Ocean University, Busan 49112, Korea
본 논문은 센서에 불확실성이 존재하는 무인잠수정에 대한 도킹 평가 알고리즘을 제안한다. 제안된 알고리즘은 상태평가와 확 률평가 두 가지의 평가로 구성된다. 상태평가는 무인잠수정이 도킹스테이션에 접근하는 과정 중 심도제어를 통해 도킹스테이션 과 동일한 수심에 도달하는데 발생 예상되는 전진거리와 실제 수평거리를 비교함으로써 심도 도달 가능 여부를, 무인잠수정의 최 소선회반경으로 인한 접근 불가 영역과 도킹스테이션의 위치를 비교함으로써 충돌 회피를 위한 선회 동작 수행 여부를 확인한다.
상태평가를 만족하며 무인잠수정이 도킹스테이션에 일정 거리 이상 접근한 경우 확률평가를 수행하여 무인잠수정의 방향각과 도 킹스테이션에 대한 상대위치, 그리고 센서 불확실성을 기반으로 도킹 성공확률을 산출한다. 최종적으로 산출된 도킹 성공확률을 설계된 문턱 값과 비교함으로써 도킹 수행 여부를 결정한다. Matlab 기반의 시뮬레이션을 통해 무인잠수정이 도킹스테이션에 접 근하는 시나리오를 구성하여 제안하는 알고리즘의 유효성을 검증한다.
[Abstract]
This paper proposes a docking assessment algorithm for an autonomous underwater vehicles (AUVs) with sensor uncertainties.
The proposed algorithm consists of two assessments, state assessment and probability assessment. The state assessment verifies the reachability by comparing forward distance to the docking station with expected distance to reach same depth as the docking station and necessity for correcting its route by comparing calculated inaccessible areas based on turning radius of the AUV to position of the docking station. When the AUV and the docking station is close enough and the state assessment is satisfied, the probability assessment is conducted by computing success probability of docking based on the direction angle, relative position to the docking station, and sensor uncertainties of the AUV. The final output of the algorithm is decided by comparing the success probability to threshold whether to try docking or to correct its route. To verify the validation of the suggested algorithm, the scenario that the AUV approaches to the docking station is implemented through Matlab simulation.
Key word :
Autonomous underwater vehicle, Docking assessment, Docking station, Uncertainty.[요 약]
충전, 탐사 데이터의 저장, 새로운 임무 부여 등을 수행함으로 써 무인잠수정 재배치에 대한 일련의 과정으로 인해 발생하는 각종 자원의 소모를 절감시키며 연속적인 임무를 가능하게 한 다[1].
어뢰형 무인잠수정은 추진기와 방향 조절을 위한 수평타와 수직타가 서로 커플링된 형태로 6자유도 운동을 제어한다. 이 는 제어되어야 하는 자유도보다 추진기의 개수가 부족하여 비 홀로노믹(non-holonomic)한 구족조건을 갖는 부족구동 시스템 이며, 방향각을 제어하기 위해서는 일정 전진거리가 요구된다.
따라서 무인잠수정의 도킹스테이션으로의 접근은 방향각제어 를 위한 충분한 거리가 확보된 경로계획을 통해 이뤄져야한다.
경로계획은 도킹스테이션까지의 경로를 적절한 경유점들을 경 유하며 추종해 도달하는 것을 목표로 하며, 항법을 통해 인식한 현재 위치에서 다음 경유점까지 요구되는 방향각에 대한 제어 를 수행함으로써 경로를 추종한다.
무인잠수정의 운용에 사용되는 항법은 크게 관성측정장치 (inertia measurement unit), 자기컴퍼스(magnetic compass), 도플 러 속도계(doppler positioning system), 심도센서(depth sensor) 등을 통한 추측항법(dead reckoning navigation), SBL(short baseline), USBL(ultra short baseline)등의 음향 센서를 통한 음 향항법(acoustic navigation), 외부 환경 정보를 기준으로 사용하 는 지구물리학적항법(geophysical navigation) 세 가지로 나뉜다 [2-3]. 이러한 항법들을 통해 현재 자세에서 다음 경유점까지 이동하기 위해 요구되는 각도를 산출하여 이에 대한 제어를 수 행한다. 이에 대해 무인잠수정의 속도와 수평타각을 통해 최소 선회반경을 계산, 이를 고려한 경로추종에 관한 연구[4], 수직 면과 수평면 운동의 디커플링을 통한 수평면 방향각과 수직면 방향각의 개별적 제어에 관한 연구[5], 경로의 파라미터화 및 추종에 관한 연구[6]등이 수행되었다.
실제 해양환경에의 무인잠수정 운용은 조류 등의 환경외란 과 센서오차의 영향을 고려해야 한다. 환경외란의 경우, 경로계 획을 기반으로 임무를 수행하는 무인잠수정에 대해 경로이탈, 제어성능 저하 등의 문제를 유발한다. 이에 대해 조류 등이 존 재하는 환경에서의 경로계획 및 외란 극복에 관한 연구[7],[8]
등이 수행되었다. 센서오차의 경우, 무인잠수정의 항법에 직접 적으로 영향을 미치며 오차를 유발한다. 이는 정밀한 제어를 통 해 좁은 입구를 통한 도킹스테이션으로의 안착을 목표로 하는 도킹임무에 치명적일 수 있다. 따라서 오차가 존재하는 센서 기
은 Ⅱ장에서 제시한다. 알고리즘의 평가를 확인하기 위해 무인 잠수정이 도킹스테이션에 접근하는 시나리오를 Matlab 기반의 시뮬레이션을 통해 구현하였으며 Ⅲ장에서 이에 대해 기술한 다. Ⅳ장에서는 본 논문의 결론과 향후 수행할 연구계획 등을 기술한다.
Ⅱ. 도킹 평가 알고리즘
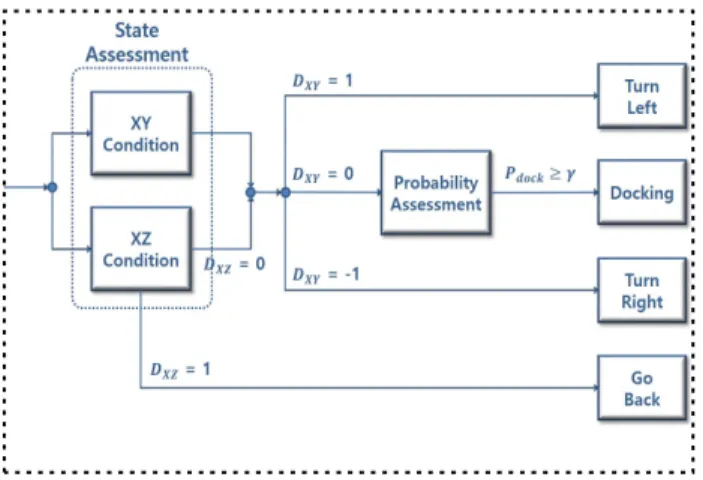
그림 1은 제안하는 알고리즘을 도식적으로 나타낸다. 무인 잠수정은 추측항법을 기반으로 도킹스테이션에 접근함을 가정 하며, 상태평가를 통해 도킹스테이션 도달 가능성에 대해 평가 한다. 상태평가는 수직면조건인 XZ Condition을 통해 심도조건 을 고려한 도달 가능성을, 수평면조건인 XY Condition을 통해 도킹스테이션과의 충돌을 고려한 도달 가능성을 평가한다. 현 재 무인잠수정의 위치에서 도킹스테이션과의 충돌 위험 없이 도달이 가능하다 평가될 경우 접근을 계속한다. 무인잠수정이 도킹스테이션으로부터 일정 거리 도달할 경우 상태평가와 확 률평가 수행 하에 접근한다. 확률평가는 무인잠수정의 방향각 과 도킹스테이션에 대한 상대위치를 토대로 도킹 성공확률을 계산하며, 최종 평가를 통해 도킹 성공확률이 문턱 값 보다 높 을 경우 도킹을 시도한다. 각 평가에서 평가 기준에 미치지 못 할 경우 조건에 맞는 복귀 혹은 선회 동작을 수행한다.
그림 1. 도킹 평가 알고리즘 흐름도
Fig. 1. Flowchart of docking assessment algorithm.
그림 2. 무인잠수정 좌표계
Fig. 2. Body-fixed frame of AUV.
2-1 표기법
무인잠수정의 6자유도 운동에 대한 위치, 자세 그리고 속도 에 대한 표기는 Fossen 저서의 표기법을 따른다[12]. Surge, Sway, Heave 운동방향의 위치와 roll, pitch, yaw 운동방향의 오 일러 각은 식 (1)과 같다. 이들의 변화율인 선속도와 각속도는 식 (2)와 같다. 그림 2는 이를 도식적으로 나타낸다.
(1)
(2)
2-2 상태평가
1) XZ Condition
수직면조건인 XZ Condition은 아래의 가정들을 기반으로 무 인잠수정의 도킹스테이션 도달 가능성에 대해 평가한다.
(가정 1) 최대 pitch 각을 알고 있으며, m ax로 나타낸다.
(가정 2) 초기 pitch 각을 알고 있으며, 이다.
(가정 3) Heave방향 선속도는 무시하며, 이는 =0 m/s이다.
(가정 4) Roll, yaw 각과 이들의 변화율을 무시하며, 이는
==0 , ==0 rad/s이다.
(가정 5) Surge 방향 선속도는 =1.5 m/s로 일정하다.
(가정 6) 무인잠수정과 도킹스테이션은 질점으로 가정한다.
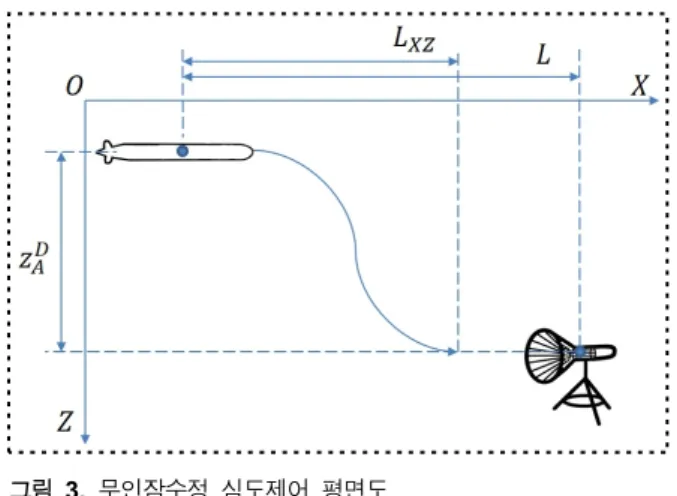
그림 3은 무인잠수정의 심도제어에 관한 변수들을 도식적으 로 나타낸다. 여기서 은 무인잠수정과 도킹스테이션의 상대 거리, 는 무인잠수정과 도킹스테이션의 상대심도를 나타낸 다. 는 무인잠수정의 심도제어 과정에서 발생하는 전진거 리로, 식 (3)과 같이 나타낼 수 있다.
(3)
그림 3. 무인잠수정 심도제어 평면도 Fig. 3. Scheme of depth control of AUV.
여기서 는 상대심도에 따른 심도제어 소요시간, 는 축에 대한 속도를 나타낸다. 본 논문에서는 일정 간격의 상 대수심과 이에 대한 심도제어 소요시간 학습데이터를 RBFNN(radial basis function neural network)을 이용하여 회 귀분석[13] 한다. 결과적으로, 식 (4)와 같이, 식 (3)을 통해 얻은 와 의 비교를 통해 도킹스테이션 도달 가능성을 평가한다. 도달 가능할 경우 XZ Condition의 출력 를 0 으로 나타내며, 도달 불가능할 경우를 1로 나타낸다.
i f i f ≤
2) XY Condition
수평면조건인 XY Condition은 다음과 같은 가정들을 기반으 로 무인잠수정의 도킹스테이션의 도달 가능성을 평가한다.
(가정 1) 최대 yaw 각을 알고 있으며, m ax로 나타낸다.
(가정 2) 최소선회반경을 알고 있으며, m i n으로 나타낸다. (가정 3) Heave방향 선속도는 무시하며, 이는 =0 m/s이다.
(가정 4) Roll, pitch각과 이들의 변화율을 무시하며, 이는
==0 , ==0 rad/s이다.
(가정 5) Surge방향 선속도는 =1.5 m/s로 일정하다.
(가정 6) 무인잠수정과 도킹스테이션은 질점으로 가정한다.
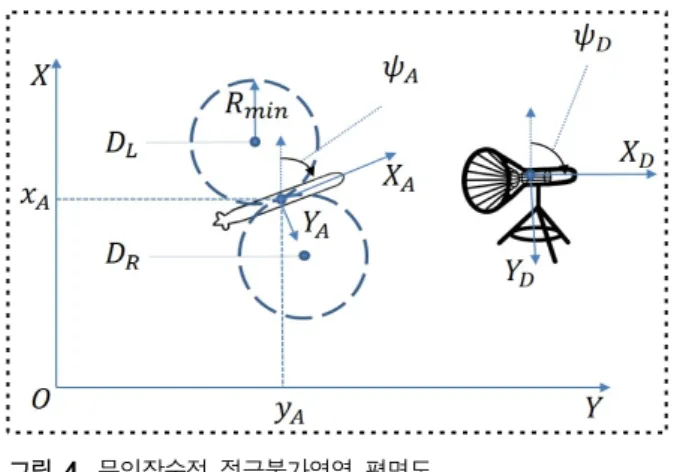
위의 가정들을 모두 만족할 때, 무인잠수정의 운동을 수평면 상에서의 회전운동과 직선운동만을 고려할 수 있다. 이때, 무인 잠수정은 비홀로노믹한 구속조건을 가지므로, 회전반경이
m i n보다 작으므로 인해 발생하는 영역에 대해 접근 불가능하
다. 무인잠수정의 좌측과 우측에 접근불가영역이 존재하게 되 며 이를 각각 과 로 정의한다. 이는 식 (5)와 같다.
≤≤minmin
minsin mincos
minsin mincos (5)
(4)
그림 4. 무인잠수정 접근불가영역 평면도
Fig. 4. Scheme of inaccessible areas of AUV.
여기서 와 는 각각 무인잠수정의 축과 축에 대한 위치 를 나타낸다. 그림 4는 이를 도식적으로 나타낸다. 결과적으로, 식 (6)과 같이, 무인잠수정의 접근불가영역인 , 와 도킹스 테이션의 위치의 비교를 통해 도킹스테이션 도달 가능성을 평 가한다.
i f ∈
i f∈
(6)
도킹스테이션이 에 위치할 경우 XY Condition의 출력
를 -1로 나타내며 좌측 선회를, 에 위치할 경우 를 1 로 나타내며 우측 선회를 수행한다. 도달 가능함으로 평가될 경 우 를 0으로 나타내며 접근을 계속한다.
2-3 확률평가
확률평가는 아래와 같은 가정들을 기반으로 산출한 무인잠 수정의 도킹 성공확률에 대해 평가한다. 상태평가 결과에 따 라 무인잠수정이 도킹스테이션이 위치한 수심에 도달 가능함 을 확인 후 확률평가를 수행하므로, 평가 과정에서는 무인잠 수정의 수평면조건만을 고려한다.
(가정 1) 무인잠수정의 위치는 Gaussian 확률분포함수에 의 해 결정된다.
(가정 2) 무인잠수정은 도킹스테이션에 대해 직진 주행 중 이다.
(가정 3) 무인잠수정의 위치와 방향각은 서로 독립적인 관 계이다.
(가정 4) 도킹의 성공 여부는 도킹스테이션의 입구로 정의 된 구역을 지나는 것으로 결정된다.
위와 같은 가정을 모두 만족할 때, (가정 3)에 따라 무인잠 수정의 상대 기반 도킹 성공확률 을 식 (7)과 같이 정의할 수 있다[9].
1) 상대위치기반 도킹 성공확률
확률평가에 대한 (가정 1)에 따라 수평면 위치에 대한 불확 실성이 포함된 무인잠수정의 위치를 Gaussian 확률분포함수 로 나타낼 수 있다. 상대위치에 대한 확률분포함수를 정의하 기 위해 수평면 위치에 대한 확률분포함수를 무인잠수정의 전 진 방향에 수직인 가상의 평면
을 정의하여 사영한다. 이때 사영행렬은 로 나타내며, 식 (8)과 같다.sin cos (8)
평면에 사영된 값들의 위치에 대한 불확실성은 식 (9)로 나타낸 와 같으며, s평면에서의 무인잠수정 위치에 대한 확 률분포함수는 식 (10)과 같이 정의할 수 있다.
(9)
(10)
다음으로, 도킹스테이션의 입구로 정의된 영역을 평면에 사영하며 식 (11)과 같이 입구의 양 끝을 , 로 정의한다.
는 무인잠수정의 무게중심에서 도킹스테이션 중심으로의 거 리벡터를,
는 도킹스테이션 입구 한쪽 끝에서 다른 한쪽 끝 까지의 벡터를 나타낸다. 그림 5는 이를 도식적으로 나타낸다.
(11)
무인잠수정의 상대위치기반 도킹 성공확률은, 식 (12)와 같 이, 식 (10)으로 정의한
평면에서의 무인잠수정의 위치에 대 한 확률밀도함수를 식 (11)에서 정의한
평면에 사영한 도킹 스테이션 입구 영역에 대해 적분함으로써 구한다. 이는 상대 위치에 대한 불확실성이 존재하는 무인잠수정이 현재 방향각 을 유지하며 도킹스테이션으로 직선 접근할 경우에 도킹스테 이션의 입구로 정의한 영역에 도달할 확률을 의미한다.그림 5. s평면에 사영된 도킹스테이션 입구 Fig. 5. Projected entrance on the s-plane.
(12)
2) 방향각기반 도킹 성공확률
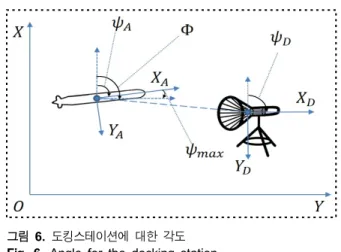
확률평가에 대한 (가정 2)와 (가정 3)에 따라 도킹스테이션 으로 직진주행 중인 무인잠수정이 수평면에 대해 가질 수 있 는 yaw각의 범위는
이다. 하지만 무인잠 수정의 최대방향각 m ax은 제한되어있으므로, 실제 가질 수 있는 방향각의 범위는 m ax m ax이다. 무인잠 수정이 도킹스테이션으로 직진 주행 중일 때 축에 기준한 도 킹스테이션 중심으로의 각을 로 정의한다. 그림 6은 이를 도 식적으로 나타낸다. 현재 상태에서 무인잠수정은 방향각
으 로 도킹스테이션에 접근함이 가장 이상적임을 알 수 있다. 이 에 대해
를 평균으로 갖는 방향각에 대한 확률분포함수를 식 (13)과 같이 나타낼 수 있다. 여기서
는 방향각에 대한 불확실성을 나타낸다.
(13)
무인잠수정의 방향각기반 도킹 성공확률은, 식 (14)와 같이, 식 (13)으로 정의한 센서 불확실성이 고려된 도킹스테이션으 로의 방향각을 평균으로 하는 확률밀도함수를 현재 무인잠수 정이 가질 수 있는 방향각 영역에 대해 적분함으로써 구한다.
이는 방향각에 대한 불확실성이 존재하는 무인잠수정이 현재 제어 가능한 방향각 범위 내에서 도킹스테이션에 도달할 확률 을 나타낸다.
max
max
(14)
그림 6. 도킹스테이션에 대한 각도 Fig. 6. Angle for the docking station.
앞에서 식 (7)로 나타낸 바와 같이, 식 (12)에서 구한 상대거 리기반 도킹 성공확률과 식 (14)에서 구한 방향각기반 도킹 성 공확률을 곱함으로써 도킹 성공확률을 도출하며, 이를 문턱 값과 비교함으로써 최종적으로 도킹 여부를 판단한다. 불확실 성을 확률분포함수로 고려하였으므로, 개 샘플링동안 발생 하는 불확실성들의 합은 확률분포함수의 평균값에 수렴한다 할 수 있다. 따라서 평가에 불확실성으로 인한 영향 반영하기 위해 식 (15)와 같이 개의 일정 샘플링동안의 성공확률 평균 값과 문턱 값을 비교하여 도킹 가능성을 평가한다. 평균값이 문턱 값보다 높아 도킹이 가능함으로 평가될 경우 도킹 평가 알고리즘의 최종 출력 을 0으로 나타내며, 문턱 값보다 낮아 불가능함으로 평가될 경우 출력 을 1로 나타낸다.
⋯
⋯
i f i f ≥
(15)
Ⅲ. 시뮬레이션
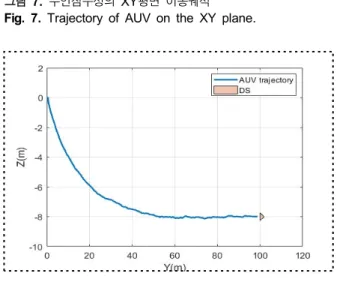
본 논문에서 제안하는 알고리즘의 평가 결과를 확인하기 위해 임의의 위치에서 등속으로 도킹스테이션에 접근하는 시 나리오를 Matlab 기반의 시뮬레이션으로 구현하였다. 시뮬레 이션 시나리오는 REMUS[14]가 고정좌표계 (0 m, 0 m, 0 m)에 서 방향각 = 90 인 상태로 출발하여 동체속도 = 1.51 m/s의 등속도로 이동, 방향각 = 90 인 상태로 (0 m, 100 m, -8 m)에 방향각 = 90 로 위치한 도킹스테이션에 도달하는 시나리오를 가정하였다. 최소선회반경 m i n은 8 m , 최대방향 각 m ax는 15 , m ax는 15 , 도킹스테이션의 입구영역의 넓 이는 0.5 m를 가정하였다. 알고리즘 상에서 고려된 센서의 불 확실성인 표준편차는 표 1과 같으며, ‘Advanced Navitation’사 의 ‘Spatial FOG’제품 데이터시트를 참고하였다.
그림 7. 무인잠수정의 XY평면 이동궤적 Fig. 7. Trajectory of AUV on the XY plane.
그림 8. 무인잠수정의 YZ평면 이동궤적 Fig. 8. Trajectory of AUV on the YZ plane.
무인잠수정은 조류 등의 환경외란이 없는 환경에서 운용됨 을 가정하였으며, 확률판단 수행 기준 이격거리는 30 m로 가 정하였다. 그림 7과 8은 각각 시나리오에 따른 무인잠수정의
평면과
평면에서의 이동궤적을 나타낸다.그림 9는 수심에 대해 RBFNN의 상대수심과 이에 대한 심 도제어 소요시간 학습을 통한 회귀분석 결과를 토대로 계산한 심도제어 시 발생하는 전진거리와 실제 상대거리의 비교를 나 타낸다. 예측된 전진거리가 실제 상대거리보다 가까움에 따라 도킹스테이션에 도달이 가능한 것으로 판단되어, 식 (4)에서 기술한 바와 같이, 그림 10에서 XZ Condition의 출력 가 0 으로 나타남을 확인할 수 있다.
그림 9. 상대거리와 심도제어 시 발생하는 전진거리의 비교 Fig. 9. Comparison between L and in Y-axis.
그림 10. 수직면조건 평가 결과 Fig. 10. Output of XZ Condition.
그림 11. 무인잠수정 접근불가영역 Fig. 11. Inaccessible areas of AUV.
그림 11은 무인잠수정의 최소선회반경으로 인한 접근불가 영역 , 을 나타낸다. 도킹스테이션이 접근불가영역에 위 치하지 않음에 따라, 식 (6)에서 기술한 바와 같이, 그림 12에서 XY Condition의 출력 가 0으로 나타남을 확인할 수 있다.
그림 13의 상단에 위치한 그래프는 도킹스테이션에 대한
그림 12. 수평면조건 평가 결과 Fig. 12. Output of XY Condition.
그림 13. 무인잠수정의 상태에 따른 도킹 성공확률
Fig. 13. Success probability of docking based on states of AUV.
무인잠수정의 상대위치에 근거한 도킹 성공확률을 나타낸다.
확률분포함수 전체 영역에 대해 적분한 값인 1은 100 %의 확 률에 대응되므로, 축에서의 상대거리가 약 30 m인 지점부터 불확실성의 영향으로 채터링이 발생하지만 성공확률이 100%
에 수렴하는 것을 확인할 수 있다. 그림 13의 하단에 위치한 그 래프는 도킹스테이션으로의 방향각 대한 무인잠수정의 방향 각에 근거한 도킹 성공확률을 나타낸다. 축에서의 상대거리 가 약 30 m인 시점부터 방향각에 근거한 도킹 성공확률이 100
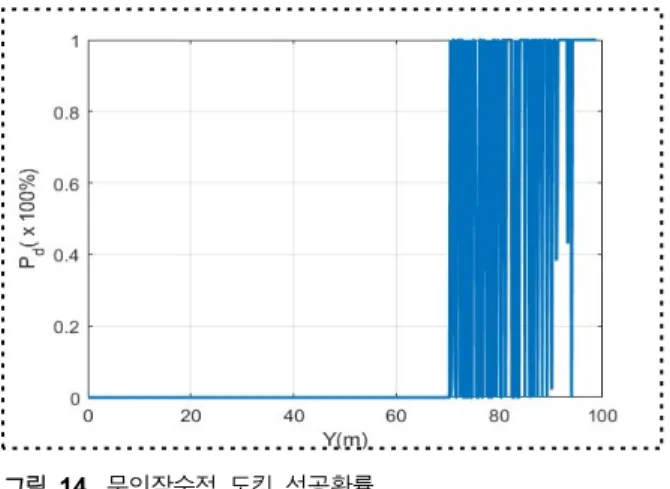
%에 수렴함을 확인할 수 있다. 그림 14는 무인잠수정의 상태 들을 기반으로 구한 도킹 성공확률들의 곱으로써, 최종 도킹 성공확률을 나타낸다.
그림 15는 그림 14에서 나타낸 도킹 성공확률과 식 (15)에 서 나타낸 바와 같이 개의 샘플링 구간에서의 확률들에 대해 평균을 취한 값들을 문턱 값과 비교한 평가 알고리즘의 최종 출력 을 비교한다. 평균값을 취하는 데이터 개수 은 10 개, 문턱 값은 90 %로 설정하였다. 확률 평균을 취한 결과 불 확실성의 영향이 줄어듦에 따라 최종 출력에 대한 채터링 현 상이 줄어듦을 확인할 수 있다.
그림 14. 무인잠수정 도킹 성공확률 Fig. 14. Success probability of docking.
그림 15. 도킹 평가 알고리즘 최종 출력
Fig. 15. Output of docking assessment algorithm.
Ⅳ. 결 론
본 논문은 센서에 불확실성이 존재하는 무인잠수정의 도킹 을 위한 평가 알고리즘을 제안하였다. 첫 번째로, 심도제어 시 발생하는 전진거리와 무인잠수정과 도킹스테이션의 상대거 리 비교를 통한 수직면에서의 도킹스테이션 도달 가능 여부 평가방법을 제시하였다. 두 번째로, 도킹스테이션의 위치와 무인잠수정의 최소선회반경으로 인해 발생하는 접근불가지 역의 위치 비교를 통한 수평면에서의 도킹스테이션 도달 가능 여부 평가방법을 제시하였다. 마지막으로 무인잠수정과 도킹 스테이션의 상대위치와 방향각을 기반으로 계산한 도킹 성공 확률들의 평균값과 문턱 값의 비교를 통한 센서 불확실성이 고려된 확률기반 도킹 수행 여부 평가방법을 제시하였다. 추 후, 본 논문을 기반으로 환경외란을 고려한 수직면 평가방법 과 실시간 정보를 고려한 최소선회반경이 적용된 수평면 평가 방법, 그리고 환경외란이 포함된 3차원에서의 도킹 성공확률 평가방법에 대한 연구를 진행할 것이며, 실증을 통한 알고리 즘 검증을 수행할 것이다.
[1] R. S. McEwen, B.. W. Hobson, L. McBride, and J. G.
Bellingham, “Docking control system for a 54-cm-diameter (21-in) AUV,” IEEE Journal of Oceanic Engineering, Vol. 33, No. 4, pp. 550-562, Oct. 2008.
[2] L. Paull, S. Saeeedi, M. Seto, and H. Li, “AUV navigation and localization: a review,” Journal of Oceanic Engineering, Vol. 39, No. 1, pp. 131-149, Jan. 2014.
[3] H. S. Kang, S. M. Hong, J. N. Sur, and J. Y. Kim, “Design of GPS-aided dead reckoning algorithm of AUV using extended kalman filter,” Journal of Ocean Engineering and Technology, Vol. 31, No. 1, pp. 28-35, Feb. 2017.
[4] S. K. Park, J. H. Lee, B. H. Jun, and P. M. Lee, “Virtual goal method for homing trajectory planning of an autonomous underwater vehicle,” Journal of Ocean Engineering and Technology, Vol. 23, No. 5, pp. 61-70, Oct. 2009.
[5] E. Y. Hong, T. K. Meng, and M. Chitre, “Online system identification of an autonomous underwater vehicle via in-field experiments,” IEEE Journal of Oceanic Engineering, Vol. 41, No. 1, pp. 5-17, Jan. 2016.
[6] L. Lapierre and B. Jouvencel, “Robust nonlinear path-following control of an AUV,” IEEE Journal of Oceanic Engineering, Vol. 33, No. 2, pp. 89-102, Apr.
2008.
[9] A. Sans-Muntadas E. F. Brekke, Ø. Hegrenaes, and K. Y.
Pettersen, “Navigation and probability assessment for successful AUV docking using USBL,” in 10th IFAC Conference on Maneuvering and Control of Marine Craft, Copenhagen: Denmark, pp. 201-209, 2015.
[10] Z. J. Sun, Y. Z. Luo, H. W. Li, “Uncertainty-dependent warning threshold of spacecraft rendezvous collision probability,” IEEE Transactions on Aerospace and Electronic Systems, Vol. 55, No. 1, pp. 2-16, Feb. 2019.
[11] C. T. Shelton, J. L. Junkins, “Probability of collision between space objects including model uncertainty,” Acia Astronautica, Vol. 155, pp. 462-471, Feb. 2019.
[12] T. I. Fossen, Guidance and Control of Ocean Vehicles, 4th ed. New York, NY: John Wiley & Sons, 1994.
[13] S. K. Park, “A method for RBF-based approximate optimization of expensive black box functions,” Korean Journal of Computation Design and Engineering, Vol. 21, No. 4, pp. 443-452, Dec. 2016.
[14] T. Prestero, Verification of a six-degree of freedom simulation model for the remus autonomous underwater vehicle, Master's thesis, Massachusetts Institute of Technology / Woods Hole Oceanographic Institution, Cambridge, MA, 2001.
천 승 재 (Seung-Jae Chon)
2018년 2월 : 한국해양대학교 제어계측공학과 (공학석사) 2018년 3월 ~ 현재 : 한국해양대학교 제어계측공학과 박사과정
※ 관심분야 : 계측제어, 지능제어, 수중로봇, 무인잠수정
서 주 노 (Joo-No Sur)
1989년 9월 : 미국 해군대학원 (NPS) 기계공학과 (공학석사) 1997년 6월 : 미국 캘리포니아 대학원 (UCSB) 기계공학과 (공학박사) 1997년 6월 ~ 2011년 7월 : 해군사관학교 기계조선공학과 교수
2014년 11월 ~ 현재 : 한국해양대학교 산업기술연구소 초빙교수, 해양군사기술연구센터 센터장
※ 관심분야 : 해양무인체계, 수중항법, 무인잠수정 제어, 군집 무인수상정 임무계획 등
정 성 훈 (Seong-Hoon Jeong)
2004년 2월 : 한국해양대학교 전자통신공학과 (공학석사) 2007년 2월 : 한국해양대학교 전자통신공학과 (공학박사) 2003년 ~ 2010년 : 부산경상대학교 멀티미디어컴퓨터과 교수 2010년 ~ 현재 : 한국해양대학교 산업기술연구소 산학연구교수
※ 관심분야 : 해양 무인화 시스템, 해양 IoT, 해상통신, ICT 융·복합 기술, 위성항법시스템