풍력터빈 스피너에 설치된 3축 초음파풍속계의 회전측정기법을 활용한 풍향풍속 측정 (Measurement of Wind Direction and Speed with a Three-axis Ultrasonic Anemometer Installed on a Wind Turbine Spinne)
9
0
0
전체 글
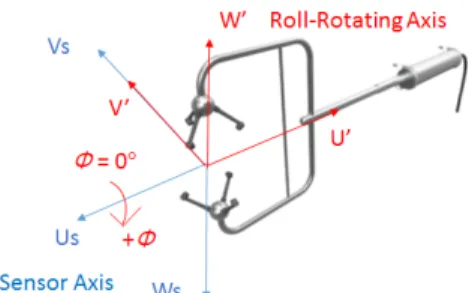
(2) 장병희․이승훈․박영민․임민수 상탑을 이용한 교정 과정을 거치기도 하지만, 후류의 특성상, 시간에 대한 변동성이 큰 속성은 불가피하다. 결과적으로 풍향 측정의 오차는 풍력터빈 요 제어의 오차를 낳게 되며, 풍력터빈의 출력 손실의 원인이 된 다. 따라서 풍력터빈의 출력 증대를 위해서는 정확한 풍향 측정을 통한 요 제어 향상이 관건이며 [1], 요 오 차에 의한 풍력터빈의 출력 손실은 이론적으로는 요 오차의 3승에 비례하지만, 경험적으로는 2승 에 비례 하며, 10° 의 요 오차는 3 % 정도의 출력감소를 가져 Fig. 1 Gil ’s WindMaster HS 3D Sonic Anemometer 온다고 한다 [2]. 이런 문제점을 극복하기 위해서는 풍력터빈 후류의 영향을 받지 않는, 풍력터빈 전방의 풍향풍속 측정이 필요한데, 원방의 풍향풍속 측정이 가능한 윈드라이다 (Wind Lidar)가 이상적인 장비이나 고가이다. 최근, ROMO Wind 사는 풍력터빈 스피너에 120도 간격으로 설치된 3개의 1축 초음파 풍속센서를 이용하여 풍황을 측정하는 iSpin 시스템을 개발하여 약 2 % 의 출력 Fig. 2 Roll-fixed coordinate system and 향상이 가능하다고 하고 있으나 [3], ROMO Wind사의 Roll-rotating coordinate system 독점 기술이라 범용적으로 사용되기에는 한계가 있다. 이러한 한계를 극복하기 위해 본 연구에서는, 선행 ′ 연구 [4, 5]에서 제안되고 풍동시험으로 검증된 바 있 ′ cos ′ sin (1) ′ sin ′ cos 는, 수평축 형태의 3축 초음파풍속계를 이용한 회전측 정기법을 실제 운용중인 풍력터빈에 적용하고, 스피너 와 풍력터빈의 봉쇄효과를 보정하여, 기존 방식의 측 이와 같은 회전측정기법은 롤 회전에 의한 원주방 향의 상대풍속이 초음파 센서의 측정치에 영향을 주지 정 결과와 비교 분석하였다. 않는다는 가정 하에 성립한다. 초음파풍속계의 원리는 초음파 전달시간의 차로, 초음파 전달방향의 풍속을 2. 측정기법 및 현장시험 계산한다. 따라서 초음파풍속계의 3개 축이 모두, 회전 축을 통과하는 형태라면, 롤 회전에 의한 상대풍속이, 2.1 측정기법 초음파 전달경로와 직각이 되므로 상대풍속의 영향은 본 연구에서 풍력터빈 전방 풍향풍속 측정에 사용 무시할 수 있을 것으로 추정된다. 이와 같은 추론은 한 수평축 3축 초음파풍속계는 선행 연구 [4, 5]에서 선행 연구 [4, 5]에서 풍동시험으로 검증되었다. 사용한 Gill 사의 WindMaster HS 3D Sonic Anemometer [6] 이며, 그 형상은 Fig. 1과 같다. 초음 2.2 현장시험 파풍속계에서 측정된 3차원 풍속은 센서축상의 3축 풍 현장시험을 위해 선택된 풍력터빈은 전남TP 육상실 속 US, VS, WS 로 출력된다. 증단지(전남영광)의 유니슨 4.3 MW 풍력터빈 (U151) 그러나 풍력터빈이 회전하면, 스피너에 장착된 초음 파풍속계도 회전하게 되어, 회전하는 센서축상의 풍속 이다. 초음파풍속계는 Fig. 3(a)와 같이 스피너 회전축 US, VS, WS 를 고정좌표계상의 풍속으로 전환해 주어 상에 설치되며, 초음파 센서의 측정점은 2.3에서 기술 야 한다. Fig. 2와 같이, 풍력터빈이 시계방향으로 φ 된 바와 같이, CFD 해석을 통해, 스피너 정점으로부터 각 만큼 롤 회전하는 경우, 회전좌표계 (X', Y', Z ') 전방 2.0 m 지점으로 결정되었다. U151 나셀위에 설치 상의 풍속 (U', V', W')은 식 (1)에 의해 고정좌표계 된 나셀풍황계의 설치 모습은 Fig. 3(b)와 같다. (X, Y, Z ) 상의 풍속 (U, V, W)으로 변환된다. 32. 풍력에너지저널 : 제11권, 제3호, 2020.
(3) 풍력터빈 스피너에 설치된 3축 초음파풍속계의 회전측정기법을 활용한 풍향풍속 측정 파풍속계 측정치와 같이 전용 데이터 장장치에 장 하였다. 한, 이 게 어 풍황 의 비교 분석을 위해, 기존의 SCADA 시스템에 장된 터빈 상태 정 보와 나셀풍황계, 윈드라이다의 측정치를 별도의 파일 로 받아 비교 분석하였다. 저. 또. 렇. 얻. 진. 저. 자료. 저. (a) 3-axis Ultrasonic anemometer. Fig. 5 The schematic diagram of the DAQ system. 2.2 봉쇄효과 전산해석 속유동의 경우, 봉쇄효과는 유동의 후방 만 아니 (b) Nacelle anemometer Fig. 3 Installation of 3-axis ultrasonic anemometer and nacelle 라, 유동의 전방으로도 용한다. 초음파풍속계가 설치 풍력터빈 전방의 회전축상의 봉쇄효과를 파 하기 anemometer on the U151 wind turbine 위해 CFD 기법으로 풍력터빈 주위 유동장을 해석하였 U151 터빈은 Fig. 4와 같이, 북서방향 해안가에 위 다. 사용한 CFD 드는 Ans s Fl ent 로, 비정상 3차 치 (A 지점) 하고 있으며, 남서쪽 인근에는 기상탑 (B 원 a ier Sto es 방정식을 사용하였으며 류모 은 지점)이 있었으나 현장시험 당시에는 철거된 상태라 전 류로 가정하는 SST 방법을 사용하였다. 기상탑과의 직접적인 비교는 불가하였다. 저. 뿐. 작. 될. 악. 코. N v. 완. -. 난. y. u. k. 난. 델. -. Fig. 6 Domain for the wind turbine CFD analysis Fig. 4 Location of the test wind turbine on the wind farm site. 설치된 초음파풍속계의 풍력터빈 SCADA 시스템에 의 영향을 최소화하기 위해, Fig. 5와 같이 전용 DAQ 장치를 별도로 설치하고, SCADA 시스템으로부터 풍 력터빈의 상태 정보와 나셀풍황계의 출력값을 아날로 그 신호로 전달받아 A D Con erter 로 변환하고, 초음 /. v. 풍력에너지저널: 제11권, 제3호, 2020. Fig. 6은 해석에 사용된 풍력터빈의 형상과 해석영 을 도시한 것으로 전방, 측면 그리고 상단 원방경계 면 지는 R (R은 풍력터빈의 반경), 후방 원방경계 면 지의 거리는 12R 정도이다. 이드 회전을 모사하기 위해서는 Sliding Mes 격 기법을 이용하였으며 시간간격 당 25회의 s b iteration을 통해 1° 회전하도 하였다. 해석결과 이드가 5회 이상 회전하면 거의 수 단계에 근접 역. 까. 9. 까. 블레. h. 자. u -. 씩. 블레. 록. 렴. 33.
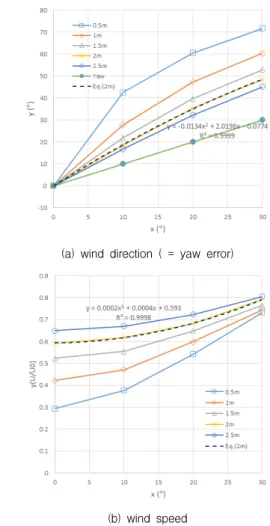
(4) 장병희․이승훈․박영민․임민수 하였으므로 10회 회전하면 해석을 하였다. 해석에 지만, 구 적인 부 이 므로, 적 한 위치를 선정 사용된 격 수는 약 만 개이며 나셀표면과 하는 것이 중요하다. 이드 표면의 격 를 Fig. 에 도시하였다. 종료. 총. 자. 자. 작. 9백. 조. 담. 크. 절. 블레. 7. Fig. 7 Surface mesh for the wind turbine nacelle and blades. (a) wind direction ( = yaw error). 2.3 봉쇄효과 보정 전술한 기법으로 정격운전중인 U151 풍력터빈 주위 유동장을 CFD 기법으로 해석한 결과는 Fig. 과 같다. 8. (a) Static pressure. (b) wind speed Fig. 9 The blockage effect at the 5 different locations along the rotational axis in front of the wind turbine spinner. 이를 위해, Fig. 과 같이 풍력터빈 전방 회전축상 의, 스피너 정점으로부터 0.5 m 간격으로 2.5 m 지, 5개의 지점에서 봉쇄효과를 분석하여 Fig. 에 도시하 였다. Fig. 의 x 축은 풍력터빈의 요각이며, Fig. (a) 의 y 축은 각 지점에서 계산된 풍향이고, Fig. (b)의 y 축은 원방풍속 (Uo) 대비 각 지점에서의 풍속 (U ) 의 비 (U/ Uo)이다. , x 축은 풍력터빈의 요각이라 수 있으며, Fig. (a)의 y 축은 각 지점에서의 풍력 터빈 기 의 상대풍향이라 수 있다. 풍력터빈 기 상대풍향은 풍력터빈의 요 제어 시, 제어변수인 요 오 차 (Ya rror)와 같은 의 이다. 8. 까. 9. (b) Velocity magnitude Fig. 8 The computed flow field around the wind turbine (wind speed = 11.1 m/s, turbine RPM = 10.9). 풍력터빈 전방에서 불어오는 바 은 풍력터빈에 가 수 봉쇄효과에 의해, Fig. 에서 보는 바와 같 이 정 은 상승하고, 풍속은 감소한다. 따라서 초음파 풍속계의 측정점이 스피너로부터 수 봉쇄효과는 람. 까워질. 록. 8. 압. 멀. 34. 록. 9. 9. 9. 즉. 볼. 9. 준. w E. 볼. 준. 미. 풍력에너지저널 : 제11권, 제3호, 2020.
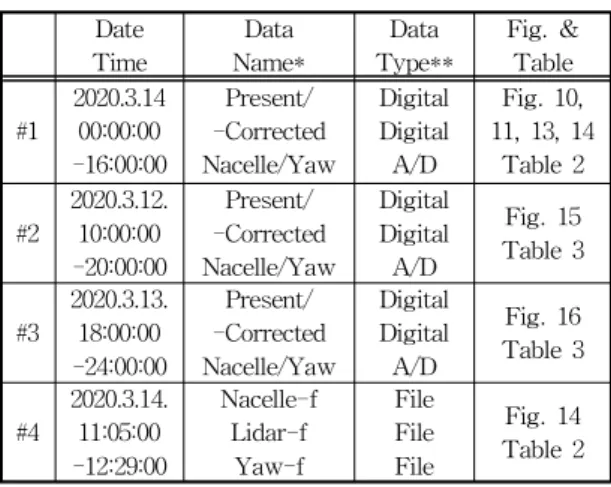
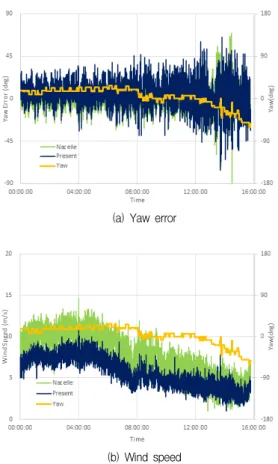
(5) 풍력터빈 스피너에 설치된 3축 초음파풍속계의 회전측정기법을 활용한 풍향풍속 측정 CFD 계산 결과로는 스피너에 가 수 풍속은 감소하고 상대풍향은 증 된다. 사용된 Gill 사의 3축 초음파풍속계의 이는 약 1 m 정도이며, 나셀 에 장착되는 이를 고 하면, 설치를 위한 연장이 불가피하며, 연장 의 이가 어 수 구 적인 문제가 다. 따라서 본 연구에서는 설치상의 구 적인 문제를 최소화하면서도 봉쇄효과를 적 한 수 으로 출 수 있는, 스피너 전방 2.0 m 지점을 초음파 풍속계의 측정점으로 선택하였다. 스피너 전방 2.0 m 지점에서의 봉쇄효과를 구하기 위하여, x 에 대한 2차 다 식의 근사식으로 구하여, Fig. 에 추가하였다. 스피너 전방 2.0 m 지점에서의 계산된 풍향으로부터 원방의 풍향을 으로 구하기 위 해서는, Fig. (a)에서 y로부터 x를 으로 구하면 된 다. , 스피너 전방 2.0 m 지점에서의 근사식으로부 터 다음과 같이 식 (2)로 구할 수 있다. 까워질. 록. 폭. 길. 길. 내. 려. 튜브. 튜브. 길. 길. 질. 록. 조. 커진. 조. 절. 준. 낮. 3. 결과 및 분석 운용중인 U151 풍력터빈에 설치된 3축 초음파풍속 계 측정 장치 은 본 연구를 위해서 고안된 시 이 다. 따라서 현장 사정과 시 의 특성상, 다 한 풍황 과 운전 건에서 본 기법의 효과를 분석하기에는 한 의 이 이 부 하였다. 현 지 은 중, 본 문에서 분석할 는 Table 1과 같다. 들. 자료. 역. 획득. 양. 많. 족. 논. 재까. 얻. 자료. 자료. Table 1 Information of the test data sets Date Data Data Fig. Time ame T pe Table 2020.3.14 Present Digital Fig. 10, 1 00 00 00 Corrected Digital 11, 13, 14 16 00 00 acelle Ya A D Table 2 2020.3.12. Present Digital Fig. 15 2 10 00 00 Corrected Digital Table 3 20 00 00 acelle Ya AD 2020.3.13. Present Digital Fig. 16 3 1 00 00 Corrected Digital Table 3 24 00 00 acelle Ya AD 2020.3.14. acelle File Fig. 14 4 11 05 00 Lidar File Table 2 12 2 00 Ya File Present Data meas red b t e proposed met od Corrected Present data corrected it .(2), (3) Data ac ired as ile Data trans er t pe to t e DAQ s stem in Fig. 5 &. 항. 9. 양. 조. N. 9. 역. 작품. 작품. *. y. **. /. #. :. -. 즉. :. :. -. :. N. /. w. /. w. /. w. /. /. #. :. -. :. :. -. :. N. /. /. (2) 이 x, y는 모두 풍력터빈 기 의 상대풍향이며, x 는 풍력터빈 대비 원방 풍향이므로 본 연구에서는 요 오차 (Ya rror)로 표기하였다. 측정풍속의 보정은 Fig. (b)의 근사식으로부터 식 (3)과 같이 구해 다. 여기서 x는 풍력터빈 대비 원방 풍향인데, 식 (2)에서 보정된 x를 사용하며, 측정된 풍 속(U)을 대 하면 보정풍속(Uo)를 구할 수 있다. 보정식 (2), (3)을 은 Fig. 의 결과는, 정격운전 건 (Uo 11.1 m s)에서의 CFD 해석 결과이다. 따 라서 다른 운전 건 (원방풍속과 풍력터빈의 RPM, 이드 피치각)에서는 CFD 해석 결과도 달라 수 있 으며, 이에 따라 봉쇄효과 근사식도 달라 수 있다. 그러나 실용화를 위해서는 어차피 기상탑을 용한 보 정시험이 필요하므로, 본 연구에서는 봉쇄효과의 보정 효과를 개 적으로 파 하기 위해 식 (2), (3)의 보정 식을 모 운전 건에 동일하게 적용하였다. 때. #. #. 조. =. 9. /. 조. 블. 레. 질. 질. 활. 략. 든. 악. 조. -. :. N. /. -f. :. -f. : 9:. *. w-f. :. u. -. y h. h. :. -f :. 9. 얻. :. -. w E. 입. :. :. N. 준. 진. 8:. -. w h Eq. qu. **. f. f. y. h. y. Fig. 10은 2020 3 14일 0시부터 16시간 동안, 두 기법으로 측정된 결과를 풍력터빈 기 상대풍향, 요 오차 (Fig.10(a))와 풍속 (Fig.10(b))으로 비교한 결과이다. Ya 로 도시된 값은 풍력터빈의 요각이다. Fig. 10(a)에서, 제안된 기법의 측정치 (Present)와 나셀풍황계의 측정치 ( acelle)는 풍력터빈에 대한 상 대풍향 (요 오차)인데, 0° 를 중심으로 비 한 정도의 분산을 보이고 있어, 요 제어가 되고 있는 정상 운전 중인 풍력터빈에서는 당연한 결과이다. 풍력터빈 의 요각은 Ya 로 도시된 바와 같이, 주로 0° 부근으 로 측정되고 있어, 주로 북풍이었음을 수 있다. 측 정된 요 오차는 Present 값이 acelle 값을 거의 가리 고 있어, 회전측정기법의 요 오차의 변동 이 나셀풍 황계 보다 약간 다고 수 있다. 반대로 풍속의 경우는, Fig.10(b)에서 보는 바와 같이, 제안된 기법의 측정치 (Present)는 나셀풍황계의 측정치 ( acelle)에 비해 게 나 다. 년. 월. 준. 즉. w. N. 슷. +/-. w. 알. N. 폭. (3). 더 크. 볼. N. 더 낮. 풍력에너지저널: 제11권, 제3호, 2020. 타난. 35.
(6) 장병희․이승훈․박영민․임민수. (a) Yaw error. (a) Yaw error. (b) Wind speed Fig. 10 Wind data measured by the nacelle anemometer and the present method (2020.3.14). (b) Wind speed Fig. 11 Wind data measured by the nacelle anemometer and the present-corrected method (2020.3.14). Fig. 10에서, 초음파풍속계의 측정점인 스피너 전방 2.0 m 지점에서, 제안된 기법의 측정치는 나셀풍황계 측정치에 비해, 상대풍향(요 오차)은 고, 풍속은 게 나 남을 확인하였다. 이러한 경향은, Fig. 에서 도시한 바와 같이, CFD 해석으로 구한 봉쇄효과 의 경향과도 일치한다. 따라서 제안된 기법의 측정치 를 식 (2), (3)으로 봉쇄효과 보정치 (Present Corrected)를 구하여 Fig. 11로 도시하였다. Fig. 11(a) 에서, 요 오차의 변동 은 나셀풍황계 측정치 ( acelle)보다 아지며, Fig. 11(b)에서 풍속은 나셀풍황계 측정치( acelle)보다 오 약간 게 나 남을 확인할 수 있다.. Fig. 5에서 전술한 바와 같이, 윈드라이다를 한 SCADA 를 별도의 파일로 수하였다. 파일로 받 은 SCADA 시간은 11시 05분부터 12시 2 분 구 간이었으나, 두 의 장 장치가 달라, 기 시간의 효과를 Fig. 12와 같이, 풍력터빈의 요각으로 비교해 보 다. Ya 는 SCADA로부터 아날로그 신호로 받 아, 본 측정장치의 DAQ에서 지 값으로 변환하여 장된 값이고, Ya 는 SCADA 에 장된 를 파일로 받은 값이다. 두 의 시각을 일치시 지는 않 으므로, 약간의 시차가 존 할 수 있지만, Fig. 12 그 상으로 식별 정도는 아니므로, 두 를 요 오차와 풍속에 대해, Fig. 13, 14으로 비교하였다.. 더 크. 더 작. 타. 9. -. 폭. N. 훨씬 작 N. 타. 36. 히려. 더 크. 포함. 자료. 입. 자료. 9. 자료. 았. 저. 록. w. 디. 저. w-f. 저. 자료. 았. 래프. 털. 자료 키. 재. 될. 자료. 풍력에너지저널 : 제11권, 제3호, 2020.
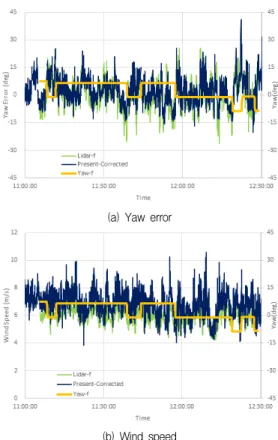
(7) 풍력터빈 스피너에 설치된 3축 초음파풍속계의 회전측정기법을 활용한 풍향풍속 측정 음을 Fig. 13(a)에서 확인할 수 있고, 풍속은 약간 게 나 을 Fig. 13(b)에서 확인할 수 있은데, 이는 나 셀풍황계 측정치를 아날로그 신호로 받아 A D 변환한 결과인 Fig. 11(a), Fig. 11(b)에서 확인한 바와 같다. 크. 옴. /. Fig. 12 Effect of different time clocks in yaw data between DAQ data (yaw) and file data (yaw-f) (a) Yaw error. (a) Yaw error (b) Wind speed Fig. 14 Comparison of the present-corrected data and the wind lidar data in SCADA (2020.3.14). 이런 경향은 SCADA 시스템에 장된 윈드라이다 측정치 (Lidar )와의 비교 결과에서도 유사하게 나 다. Fig. 14(a)에서, 윈드라이다의 요 오차 변동 은 제 안된 기법의 보정치 (Present Corrected) 보다 게 나오지만, Fig. 13(a)의 나셀풍황계 ( acelle ) 보다는 다. Fig. 14(b)에서, 윈드라이다의 풍속 측정치는 제안 된 기법의 보정치보다 게 나오는 데, 그 풍속의 변동 은 제안된 기법의 보정치는 론, Fig. 13(b)의 나셀풍황계보다도 게 나 다. 이는 윈드라이 다의 측정점은 윈드라이다 전방 0 m 이고, 나셀풍황계 는 풍력터빈 후방의 후류 영 에 설치되어 있어, 당연 한 결과라 수 있다. 이상의 결과를 정 적으로 분석하기 위하여, Table 1 의 데이터 1 와 4 에 대해 요 오차를 평 치 (Mean) 와 표 차 (STD V)로 비교하면 Table 2 과 같다. 저. -f. 타난. 폭. -. (b) Wind speed Fig. 13 Comparison of the present-corrected data and the nacelle anemometer data in SCADA (2020.3.14.) -f. /. 더 낮. 저. 저. 르. N. 록. N. 뿐. -f. -. 풍력에너지저널: 제11권, 제3호, 2020. 폭. -f. 작. Fig. 13에서의 acelle 값은 SCADA 에 장된 나셀풍황계 측정치로, SCADA 로부터 아날로그 신호 를 받아 A D 변환 후 장된 값인 Fig. 11의 acelle 값과는 다 다. 그러나 기 된 시간 구간만 다를 , 나셀풍황계 측정치 ( acelle )에 비해, 제안된 기법의 보정치 (Present Corrected)가 요 오차의 변동 은 N. 더 크. N. 작. 폭. 물. 훨씬 작. 타난 8. 역. 볼. 량. #. 준편. #. 균. E. 37.
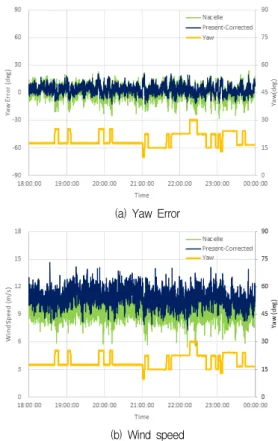
(8) 장병희․이승훈․박영민․임민수 Table 2 Mean and standard deviation (STDEV) of yaw error measured with 3 different sensors (2020.3.14. 11:05~12:30) acelle Lidar Present Present (°) Corrected Mean 1.6 0.4 3.2 2.0 STD V 11.4 .1 13. .2 N. -. -f. E. 요 오차의 변동 은 약간 게 나 나고, 풍속은 약간 게 나 나는 경향은, Fig. 15과 Fig. 16과 같이, 직전 이 간의 측정치에서도 확인할 수 있다. 폭. 더 크. 더 작. 타. 타. 틀. 재. -f. 8. 8. 7. (a) Yaw Error (a) Yaw Error. (b) Wind speed Fig. 16 Wind data measured by the nacelle anemometer and the present-corrected method (2020.3.13) (b) Wind speed Fig. 15 Wind data measured by the nacelle anemometer and the present-corrected method (2020.3.12). Table 3 은 Fig. 15, Fig. 16의 결과를 요 오차 평 치 (Mean)와 표 차 (STD V) 측면에서 정 적으로 비교한 결과이며, 그 경향은 Table 2 와 같다. 균. 준편. E. 량. 요 오차의 평 치는 나셀풍황계 측정치 ( acelle ) Table 3 Mean and standard deviation (STDEV) of yaw 에 비해, 윈드라이다(Lidar )는 1.2° 고, 본 기법의 error comparison on two more days 측정치 (Present)는 1. ° 지만, 그 보정치 2020.3.12. 2020.3.13. Present Present (Present Corrected)에서는 그 차이는 0.4° 로 어 (°) acelle acelle Corrected Corrected 다. 하지만, 기상탑 와 같은 기 치가 으므로 2. 0. 3.2 어 값이 정확하다고 단하기는 어 다. 그러나 Mean 1.2 STD V 12.2 . . 4. 요 오차의 표 차는 본 기법의 측정치, 나셀풍황계, 윈드라이다, 본 기법의 보정치가 각각 13. °, 11.4°, .1°, .2° 로 나 다. , 본 기법의 측정치에 식 (2) Table 2, 3에서, 3일간의 데이터를 분석한 결과, 나 를 적용한 보정치의 표 차가 가장 게 나 다. 셀풍황계 측정치 대비 본 기법의 보정치는 요 오차 평 제안된 기법의 보정치가 나셀풍황계 측정치에 비해, 치에서는 0.4° 2.4° 정도 으며, 표 차는 균. N. -f. 7. 더. 크. -. 줄. 든. 자료. 느. -f. 작. 더. 준. 판. -. N. 없. 렵. E. 준편. -. N. 9. 8. 88. 77. 7. 8. 8. 7. 타났. 즉. 준편. 작. 타났. 균. 38. ~. 더 컸. 준편. 풍력에너지저널 : 제11권, 제3호, 2020.
(9) 풍력터빈 스피너에 설치된 3축 초음파풍속계의 회전측정기법을 활용한 풍향풍속 측정 3.0° 4.2° 정도 게 나 다. 참고문헌 결과적으로 요 오차 평 치는 윈드라이다가 가장 고, 본 기법의 보정치가 가장 다. 만일 본 기법 [1] Sc lip , D., Anger, ., app, S., Bisc o , O., 의 보정치가 정확하다면 그만큼 요 오차가 큰 상태로 Ho sa , M., Rettenmeier, A., and n, M., 2011, 풍력터빈이 요 제어되고 있어 출력 손실이 있다고 Prospects o Optimi ation o nerg Prod ction 수 있으나, 기상탑 와 같은 기 치가 으므로, b L DAR Assisted Control o Wind T rbines, 가지 방식 중 어 것이 가장 정확한지 단할 수는 Proceedings o ropean Wind nerg 다. 그러나 요 오차의 표 차는 본 기법의 보정치 Con erence and ibition, W A, Br ssels, 가 나셀풍황계나 윈드라이다에 비해 현격 은 값으 Belgi m, pp. 14 1 . 로 나온다. , 본 기법의 보정치로 구한 요 오차는 가 [2] rag , . A. and Fleming, P. A., 2012, Rotor 장 은 표 차를 보이므로, 풍력터빈의 요 제어에 Speed Dependent Ya Control o Wind T rbines 사용하기에 그 만큼 효과적일 수도 있다. Based on mpirical Data , Proceedings o 50t A AA Aerospace Sciences Meetings and ibit, 6.결 론 American nstit te o Aerona tics and Astrona tics, as ille, Tennessee, USA, pp. 12. 운용중인 4.3 MW 풍력터빈의 스피너 정점에 수평 형 3축 초음파풍속계를 장착하고, 선행 연구 [4, 5]에서 [3] Froese, M. and Fatrdia, . 2016, ncrease A P b 2% Wit mpro ed Wind Meas rement, 제안된 회전측정기법에 CFD 결과를 용한 봉쇄효과 Windpo er ngineering De elopment Webinar 보정기법을 적용한 결과, 풍속은 나셀풍황계나 윈드라 Series, Slides are a ailable online ttps . 이다에 비해 약간 게 나 으며, 요 오차의 평 slides are.net Windpo er ngineering increase a 치는 약간의 차이가 있었으나 기 치가 으므로 어 ep b 2 it impro ed ind meas rement, 것이 가장 정확한지는 수 었다. 그러나 제안 an ar 21, 2016. 된 기법의 보정치는 요 오차의 표 차가 나셀풍황계 [4] C ang, B. H., Lee, S., C o, T, H. and im, Y. 는 론, 윈드라이다 측정치보다도 게 나 다. , W., 201 , Tec ni e or Meas ring Wind 제안된 회전측정기법에 CFD 결과를 용한 보정기법 Speed and Direction Using a Roll rotating 을 적용할 경우, 가장 은 표 차로 요 오차를 측 T ree A is Ultrasonic Anemometer, o rnal o 정할 수 있으므로, 풍력터빈 요 제어에 효과적일 ind energ , Vol. , o. 3, pp. 5 12 (in orean). 수 있다. 봉쇄효과 보정을 CFD 결과가 아 , 기상탑을 용한 보정시험으로 대 한다면, 풍속과 요 오차의 [5] C ang, B. H., Lee, S., and im, Y. W., 201 , Tec ni e or Meas ring Wind Speed and 평 치도 보다 정확하게 을 수 있다. 다만, 이러 Direction Using a Roll rotating T ree A is 한 결론은 단지 의 시험만으로 어 결과이므 Ultrasonic Anemometer ( ), o rnal o ind 로, 실용화를 위해서는 여러 가지 풍속과, 우, 설 energ , Vol. , o. 4, pp. 15 (in orean). 다 한 환경에서 보정되고 검증 필요가 있다. [6] Gill nstr ments, A ailable online ttp gillinstr ments.com prod cts anemometer i ndmaster s. tml, April 30, 201 . ~. 더 작. 타났. 균. 작았. 컸. h. f. 볼. 자료. 준. 없. 느. J. 세. h ff. Kuh. f. y. z. f E. I. ”. E. Exh. u. K. u. u. Eu. f. 히 낮. y. f. f. 준편. 즉. K. ß. “. 판. 없. 작. f. E. E. y. u. - 7. h K. “. 준편. w. f. E. u. ”. f. I. h. Exh. I. u. u. N. f. u. hv. 9-. K. y. 활. h. w. 더 크. 알. h. 없. J. 물. 작. 타났. u. “. h qu. K. f. u. - x. w. ” J u. y. 9 N. -. h. “. 얻. 얻. h qu. f. 8. -. 강. y. 9 N. I. h. h. ://. u. J u. 9-. u. -h h. 풍력에너지저널: 제11권, 제3호, 2020. K. u. II “. 될. f. K. 진. 강. 양. u. -. h. 체. 몇 번. -. h. 8. 닌. 등. -. 준편. 더. 더. -w. h. 즉. ://www. /. y. 활. 작. E. v. ”. v. : h. w. - y- -w h-. 없. 준편. 균. &. /. E. u. v. 준. 느. “I. v. E. 타났. 균. 활. I. w. K. v. /. - x. f. :. u. /. /w. 8. 39.
(10)
수치

+4
관련 문서
Daily mean of air pressure, air temperature, dew-point temperature, wind direction and speed, relative humidity and cloud amount is the average of hourly
Daily mean of air pressure, air temperature, dew-point temperature, wind direction and speed, relative humidity and cloud amount is the average of hourly
Daily mean of air pressure, air temperature, dew-point temperature, wind direction and speed, relative humidity and cloud amount is the average of hourly
Daily mean of air pressure, air temperature, dew-point temperature, wind direction and speed, relative humidity and cloud amount is the average of hourly
Daily mean of air pressure, air temperature, dew-point temperature, wind direction and speed, relative humidity and cloud amount is the average of hourly
Daily mean of air pressure, air temperature, dew-point temperature, wind direction and speed, relative humidity and cloud amount is the average of hourly
Daily mean of air pressure, air temperature, dew-point temperature, wind direction and speed, relative humidity and cloud amount is the average of hourly
Daily mean of air pressure, air temperature, dew-point temperature, wind direction and speed, relative humidity and cloud amount is the average of hourly
