http://dx.doi.org/10.12673/jant.2015.19.1.33
This is an Open Access article distributed under the terms of the Creative Commons Attribution Non-CommercialLicense(http://creativecommons .org/licenses/by-nc/3.0/) which permits unrestricted non-commercial use, distribution, and reproduction in any medium, provided the original work is properly cited.
Received 19 December 2014; Revised 26 January 2015 Accepted (Publication) 16 February 2015 (28 February 2015)
*Corresponding Author; Jeong-hyun Cho
Tel: +82-2-860-1545 E-mail: [email protected]
J. Adv. Navig. Technol. 19(1): 33-40, Feb. 2015
시스템 엔지니어링을 적용한 A-SMGCS 적합성 검증 방안 연구
A Study on Systems Engineering Based Compliance Procedure for A-SMGCS
설 은 숙1 · 김 상 헌1 · 구 성 관2 · 조 정 현1*
1
한국산업기술시험원 시스템융합본부
2
한서대학교 항공레저산업학과
Eun-suk Seol1 · Sang-hun Kim1 · Sung-kwan Ku2 · Jeong-hyun Cho1*
1
System Convergence Technology Division, Korea Testing Laboratory, Seoul 152-718, Korea
2
Department of Aviation Leisure & Industry Management, Hanseo University, Chungcheongnam-do 357-953, Korea
[요 약]
A-SMGCS는 모든 기상조건에서 공항 이동지역 내 요구되는 안전수준을 확보하는 동시에 정해진 지상이동률을 유지하기 위하 여 항공기와 차량에게 경로, 안내, 감시, 통제기능을 제공하는 시스템이다. 본 연구에서는 A-SMGCS 적합성 검증방안을 개발하기 위해 시스템 엔지니어링을 도입하였다. A-SMGCS 운용개념을 통해 레벨 Ⅳ급 A-SMGCS에 대한 요구사항을 정의하였으며, 기능 분석과 할당을 통해 시스템 아키텍처와 시스템 규격을 도출하였다. A-SMGCS 개발을 위한 WBS와 IMS를 수립하였으며, 마지막 으로 시스템에 대한 확인 및 검증을 위한 CCL과 TEMP를 개발하였다.
[Abstract]
Advanced surface movement guidance and control system (A-SMGCS) is a system providing routing, guidance and surveillance for the control of aircraft and vehicles in order to maintain the predetermined surface movement rate under all weather conditions while maintaining the required level of safety. In the present study, system engineering was introduced to develop the compliance procedure for the A-SMGCS. At first, requirements for the level IV A-SMGCS were defined and analyzed from the concept of operations (CONOPS). Then, system architecture and specifications were constructed through the functional analysis and allocation. After that, work breakdown structure (WBS) and related integrated master schedule (IMS) were established. Lastly, compliance checklist (CCL) and test and evaluation master plan (TEMP) were developed to verify and validate the system.
Key word : Advanced surface movement guidance and control system, System engineering, Compliance, Test and
evaluation master plan, Work breakdown structure.
Sensor fusion
Guidance Monitoring
(Control)
Planning (Routing) Human machine
interface
Movements Surveillance
Location, Identity Velocity, Quality
Definition of monitoring parameters (Conflict table)
Conflict Resolution
Planning rules and objective
Planned Routes Control of lights/signs pilot/vehicle displays
Planned routes Deviation from planned routes
Stop bar or TXC switching Voice communication Surveillance results
Data acquisition Echoes, Replies, Broadcast
Warning, Alerting Cooperative sensors
ASR/
SSR Non-coop
sensors
PSR SMR MLAT ADS-B
Dependent Independent
그림 2. A-SMGCS 인터페이스 구조 Fig. 2. A-SMGCS interface.
그림 1. A-SMGCS 아키텍처 Fig. 1. A-SMGCS architecture.
Ⅰ. 서 론
최근 항공교통량의 증가로 인한 공항의 혼잡, 저시정 상태에 서의 운영, 비행장 배치의 복잡성 등 공항의 지상이동 운영에 영향을 주는 요소들이 증가하고 있다. 이러한 것들은 항공사고 및 준사고의 원인이 되기도 하고, 항공기 지연을 야기하는 등 공항 이동지역 내 항공기 안전 및 지상이동 흐름에 영향을 주고 있다. 최근 높아진 공항운영 수준은 저시정인 경우에도 일정수 준 이상의 수용력과 항공기 안전성을 확보하도록 요구한다. 이 런 문제를 해결하기 위한 방안 중 하나로 항공기 지상이동유도 및 통제시스템 (A-SMGCS; advanced surface movement guidance and control system)이 도입되었다.
국제민간항공기구 (ICAO; international civil aviation organization) Doc 9830에 따르면, A-SMGCS는 높은 수준의 다 양한 기능과 현대적인 기술들을 사용하여 어떠한 기상조건, 교 통밀도 및 비행장 배치에서도 충분한 수용력과 안정성을 제공 할 수 있는 시스템으로 정의되고 있다 [1].
유럽에서는 Eurocontrol 등 다수 기관들이 컨소시엄을 구성 하여 1990년도 중반부터 관련 연구가 수행되고 있으며, 높은 레벨단계의 시스템 개발을 목표로 연구가 진행 중이다. 미국 역 시 공항의 이동지역 내 이동체의 효율적 관리를 위한 연구가 지 속적으로 수행되고 있다. 우리나라 역시 국토교통분야 연구개 발의 일환으로 ICAO Doc 9830에서 정의하는 레벨 Ⅳ급 A-SMGCS 시스템 개발을 추진하고 있다.
현재 진행되고 있는 A-SMGCS 프로젝트에서는 다수의 조직 과 인력이 참여하고, 다양한 프로세스, 방법론, 도구 및 자원들 이 투입될 것을 고려하여 연구개발에 대한 비용증가, 일정 지 연, 성능 저하 등의 문제를 연구개발 초기에서부터 해결해 나가 는 동시에 전체적인 성과를 높일 수 있도록 시스템 엔지니어링 (SE; system engineering)를 기반으로 연구를 수행하고 있다.
본 연구에서는 A-SMGCS와 SE에 대한 일반적인 개념을 살 펴보고, 개발 시스템을 정의하였다. 시스템에 대한 요구사항 분 석 및 기능 할당을 수행하였고, 업무분해구조 (WBS; work breakdown structure)와 IMS (integrated master schedule)를 수립 하였다. 마지막으로 적합성 검증 프로세스를 수립하고, 적합성 점검표 (CCL; compliance checklist)를 작성하였으며, 시험평가 기본계획 (TEMP; test & evaluation master plan)을 수립하였다.
Ⅱ. A-SMGCS
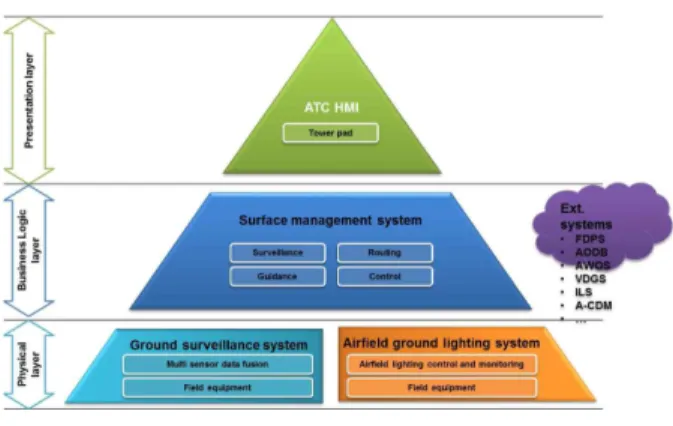
ICAO에서는 A-SMGCS를 시정 등급에 상관없이 안전 수준 을 유지하며 공항 이동지역 내 항공기 및 차량 등을 유도하기 위하여 감시, 경로, 안내, 통제 등 4가지 핵심 기능을 제공하는 시스템으로 정의하며, A-SMGCS 구조는 그림 1과 같다. 감시 기능은 이동지역 내 항공기, 차량 및 비인가 목표물을 확인 및 식별하는 기능이고, 경로기능은 항공기 및 차량들이 이동지역
내 안전하고 신속하게 이동할 수 있도록 경로를 제공하는 기능 이며, 안내기능은 항공기 조종사 및 차량운전자에게 할당된 경 로를 지상 등화의 점등을 통해 제공할 수 있는 기능이다. 통제 기능은 충돌 및 활주로 침입을 방지하고, 비정상 상황 발생시 경보를 제공하는 기능이다.
A-SMGCS는 4가지 핵심기능과 함께 지상감시 장비와 공항 의 지상등화를 통제 및 모니터링하는 장비 등도 포함되어 있으 며, ARTS (automated radar terminal system), AWOS (automated weather observing system), VDGS (visual docking guidance system) 등과 같은 외부시스템과도 인터페이스할 수 있어야 한 다. A-SMGCS 기능들은 HMI (human machine interface)를 통해 표시되고 시스템의 수행주체인 관제사가 관제업무를 효율적으 로 수행할 수 있도록 지원한다. A-SMGCS의 주요 인터페이스 구조는 그림 2와 같다.
ICAO Doc 9830에 따르면, A-SMGCS 레벨은 4가지 핵심기
능인 감시, 경로, 안내, 통제기능에 대해 시스템이 제공하는 수
준에 따라 레벨 Ⅰ부터 레벨 Ⅴ까지 5단계로 구분되며, 각 단계
별 제공되는 수준은 그림 3과 같이 나타낼 수 있다. A-SMGCS
레벨 등급이 올라갈수록 시스템의 역할이 증가하며, A-SMGCS
레벨 V는 자동화 단계가 최고 수준인 시스템을 의미한다. 예를
들어, A-SMGCS 레벨 Ⅳ급은 감시, 경로, 안내, 통제기능이 시
스템에 의해 자동적으로 제공되는 수준을 말한다.
그림 3. A-SMGCS 레벨 등급
Fig. 3. A-SMGCS implementation levels.
그림 4. 시스템 엔지니어링 프로세스 Fig. 4. Systems engineering process.
그림 5. 위험 매트릭스 Fig. 5. Risk matrix.
Ⅲ. 시스템 엔지니어링
3-1 SE 프로세스
SE는 복잡한 시스템을 개발하는데 있어, 운용자의 요구를 만족시키는 통합된 수명주기 균형시스템에 대한 해결책을 적 용하고 검증하기 위한 다분야 학문의 엔지니어링 접근방법이 다 [2].
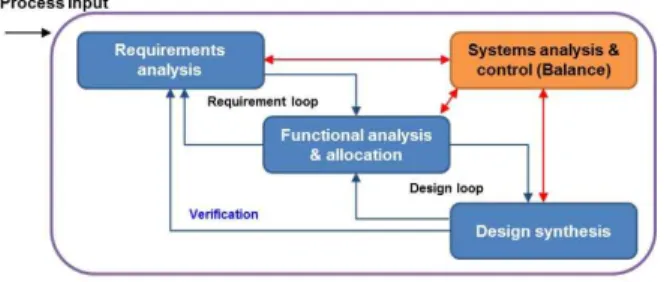
SE 프로세스 모델에는 DAU (defense acquisition university), CMMI (capability maturity model integration), ANSI/EIA 632, ISO 15288 등이 있다. 전통적인 SE 프로세스 모델인 DAU 모델 은 그림 4와 같이 요구사항 분석 (requirements analysis), 기능분 석 및 할당 (functional analysis and allocation), 설계조합 (design synthesis), 시스템 분석과 통제 (systems analysis and control)로 구성되며, 이들은 하향식 (top-down)방법에 의해 순차적으로 적용되면서 주어진 문제를 반복적․순환적인 과정을 통해 해결 한다 [3].
3-2 요구사항 분석
시스템 요구사항 분석은 시스템을 정의하기 위한 초기단계 업무이며, 아키텍처의 설계, 시스템 통합 및 검증시 기초자료가 된다. 요구사항 분석시 기능 및 성능 요구사항 등을 도출하고,
시스템 인터페이스, 설계 고려사항 및 제약사항들을 명확히 정 의하여야 한다 [4].
3-3 기능분석 및 할당
요구사항을 구체적으로 정의하는 과정으로, 시스템의 비용, 일정, 인터페이스 등 여러 가지 제약사항 검토를 통해 많은 기 능 및 성능 요구사항이 확인된다. 확인된 요구사항들은 문서화 되어야 하며, 추적할 수 있어야 한다.
3-4 설계조합
설계조합은 기능분석 및 할당단계에서 정의된 기능 및 성능 요구사항을 기반으로 개발되는 과정을 의미한다. 이 과정에서 는 해당 기능 및 성능 요구사항이 물리적 아키텍처로 변환되고, 시스템의 모든 구성요소에 해당하는 규격서가 만들어지며, 상 호간의 상세한 인터페이스가 정의된다.
3-5 시스템 분석 및 통제
시스템 분석은 기능, 성능 및 설계 요구사항 등에 대한 정량 적인 근거를 제시하기 위한 절충분석 (trade studies), 모델링 및 시뮬레이션 (modeling and simulation) 등의 활동들을 의미하며, 시스템 통제는 형상관리 (configuration management), 기술검토 (technical reviews and audits), 위험관리 (risk management) 등의 활동들을 의미한다. 이러한 시스템 분석 및 통제 활동은 모든 SE 프로세스 단계에서 적용된다.
먼저, 절충연구는 기능 및 성능 요구사항들이 물리적 아키텍 처로 변환되는 과정에서 최적의 대안을 선택하고, 해결책을 제 공할 수 있도록 지원하는 연구로써, 의사결정을 할 수 있도록 충분한 근거를 확보하고, 문서화하여야 한다.
모델링과 시뮬레이션은 요구사항 정의, 프로그램 관리, 설계 와 엔지니어링 등 모든 단계에 걸쳐 중요한 도구로서 사용된다.
형상관리는 설계단계에서 기준형상을 설정한 이후 형상 변
경사항을 추적 및 통제하며, 이를 문서화하여 관리하는 업무를
말한다. 또한, 인터페이스를 정의하고, 식별하도록 하며, 제품
그림 7. 기술 검토 프로세스 Fig. 7. Technical review process.
그림 6. V 모델 Fig. 6. V-model.
이동체 감시정보 처리
관제용 HMI 유지보수용 HMI
등화감시제어서버
A-SMGCS 서버
운영DB 서버 ILCMS 서버
운영DB 일체형CCR
IRU A-SMGCS서버
운항/기상정보 처리
운항/기상정보 처리 서버 이동체 감시정보 처리 서버
관제용 HMI 단말 유지보수용 HMI 단말
일체형CCR장비
IRU 장비
그림 8. 시스템 아키텍처 Fig. 8. System architecture.
과 관련 문서 간에 일관성을 유지하도록 한다.
기술검토는 마일스톤 주요시점에서 연구 진행사항을 확인 하고 다음 단계로 진입하기 위한 기술검토를 계획하고, 수행하 는 활동을 의미한다.
위험관리는 개발과정에서 발생할 수 있는 잠재적인 위험과 발생된 이슈를 추적 및 관리할 수 있는 방법을 적용하여 위험을 다루는 행위 또는 실행을 말하며, 이러한 활동에는 위험관리계 획, 위험요소 식별, 위험분석, 위험관리 방안의 이행, 위험감시 및 통제 등이 있다 [5]. 그림 5는 위험확률과 위험 영향에 따라 위험수준이 결정되는 위험 매트릭스를 나타낸 것이다.
3-6 검증
SE에 의한 검증 프로세스는 그림 6과 같이 V-모델로 설명할 수 있다. 개발단계는 하향식 프로세스로 진행되는 반면, 검증활 동은 상향식 프로세스로 진행된다. 개발단계는 사용자 요구사 항 분석, 시스템 요구사항 분석, 시스템 설계 및 구현 순으로 진 행되며, 검증단계는 모듈단위 요구사항, 하부시스템 요구사항, 시스템 요구사항 및 사용자 요구사항 순으로 검증이 진행된다.
또한, 개발과정에서는 단계별로 SRR (system requirement review), SFR (system functional review), PDR (preliminary design review), CDR (critical design review), 검증과정에서는 TRR (test readiness review)과 SVR (system verification review) 등과 같은 기술 검토회의를 계획할 수 있다.
이러한 기술 검토회의에서는 그림 7에서 보는 것과 같이, 이 전단계, 현재단계, 이후단계로 구분되어 진행된다. 이전단계에 서는 계획 (plan), 숙지 (familiarize), 예비검토 (pre-review)활동 이 이루어지고, 현재단계에서는 검토 (review)와 해결 (resolve) 활동을 진행한다. 그리고 이후단계에서는 후속조치 (follow-up) 활동이 이루어진다.
검증은 설계조합 단계에서 정의된 물리적 아키텍쳐가 시스 템의 요구사항을 충족하는지 확인하는 것을 의미한다. 적합성 검증방법 (MOC; means of compliance)에는 문서검사, 해석, RM&S 분석, Lab/Bench 시험, 모의, 구성품 인증 등이 있다 [6].
MOC를 적절하게 선택하지 못하면 부정확한 검증결과뿐 아니 라, 비용 및 일정이 크게 증가할 수 있기 때문에 계획시 적절하 면서도 합리적인 방법을 선택하는 것이 중요하다.
Ⅳ. 시스템엔지니어링 기반 적합성 검증
4-1 시스템 정의
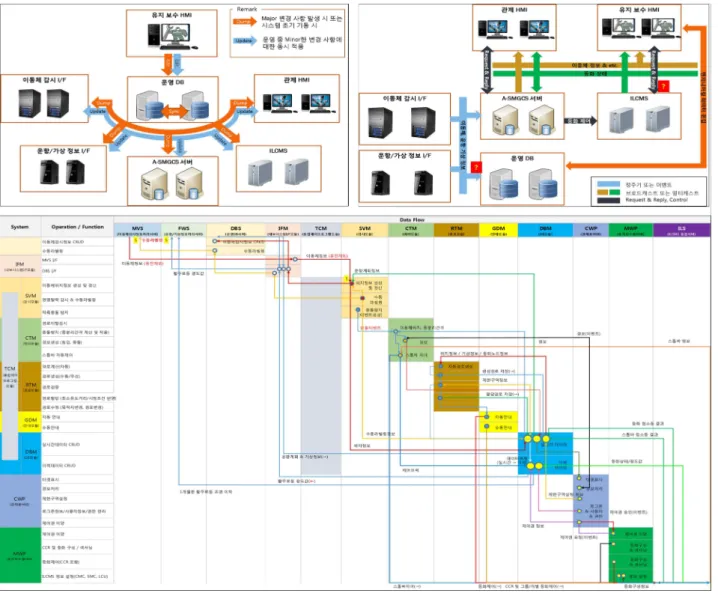
시스템은 그림 8과 같이, 4가지 핵심기능 및 통합제어 소프 트웨어가 운용되고, 실시간 데이터베이스 및 이력 데이터베이 스가 저장되어 있는 A-SMGCS 서버를 중심으로 이동체감시정 보와 운항/기상정보와 같은 외부시스템의 데이터를 처리하는 운영DB, 등화를 감시 및 제어하는 ILCMS (individual lighting control and monitoring system), 일체형 CCR (constant current regulators), 관제용 HMI 및 유지보수용 HMI 등으로 구성되어 있다.
여러 개의 하부시스템과 단위모듈들로 구성된 A-SMGCS를 하나의 시스템으로 통합 및 구현하기 위해서는 시스템 인터페 이스를 위한 데이터흐름 정의가 선행되어야 한다. 이에 따라, 그림 9에서 보는 것과 같이 N2차트를 활용하여 시스템 데이터 흐름을 정의하였다. 이는 개발에 참여한 모든 기관들로 구성된 기술공유회를 통해 확정하였다.
4-2 요구사항 분석 및 기능할당
먼저, 시스템을 이해하고 시스템 목적 및 목표를 정의하며
운용자들에 대한 책임을 명확히 구분하고자 시스템 운용개념
그림 10. 시스템 규격 트리
Fig. 10. System specification tree.
요구사항 분야 개수 요구사항 유형 개수
일반 331 운용 35
경로 34 설계 259
안내 25 기능 153
감시 33 성능 50
통제 54 인터페이스 20
HMI 29 합계 517
지원 11
합계 517
표 1. 시스템 요구사항
Table 1. System requirements.
그림 9. 시스템 인터페이스 구조 Fig. 9. System interface.
서를 기술하였다. 운용개념서에는 시스템의 목적, 요구사항 및 제약사항 등이 포함되어 있다.
요구사항 분석을 위해 운용개념서와 ICAO Doc 9830을 기본 자료로 활용하여 분석하였고, 분석 결과, 517개의 요구사항이 도출되었다. 도출된 517개의 요구사항은 각각 요구사항의 분야
및 유형에 따라 분석하였다.
요구사항 분야는 일반, 경로, 안내, 감시, 통제, HMI, 지원 등
으로 구분하고, 요구사항 유형은 운용, 설계, 기능, 성능, 인터페
이스로 구분하였다. 요구사항 분야 및 유형별로 분석한 결과는
표 1과 같다.
그림 13. 시스템 확인 및 검증 프로세스
Fig. 13. System verification and validation process.
Task Name
Milestone 1.4 GCSR SW 개발
1.4.1 A-SMGCS 핵심기술 개발 1.4.1.1 경로/안내기능 알고리즘 개발
1.4.1.1.1 알고리즘 요구사항 분석 1.4.1.1.1.1 경로기능 모듈규격서 작성 1.4.1.1.1.2 안내기능 모듈규격서 작성 1.4.1.1.2 경로/안내기능 알고리즘 기본설계
1.4.1.1.2.1 경로기능 개념설계서 작성 1.4.1.1.2.2 안내기능 개념설계서 작성 1.4.1.1.3 경로/안내기능 다이어그램 설계 1.4.1.1.3.1 경로기능 상세설계서 작성
1.4.1.1.3.1.1 경로기능 UseCase 다이어그램 개정 1.4.1.1.3.1.2 경로기능 Activity 다이어그램 작성 1.4.1.1.3.1.3 경로기능 Class 다이어그램 작성 1.4.1.1.3.1.4 경로기능 Sequence 다이어그램 작성 1.4.1.1.3.1.5 경로기능 기초 구현 1.4.1.1.3.2 안내기능 상세설계서 작성
1.4.1.1.3.2.1 안내기능 UseCase 다이어그램 개정 1.4.1.1.3.2.2 안내기능 Activity 다이어그램 작성 1.4.1.1.3.2.3 안내기능 Class 다이어그램 작성 1.4.1.1.3.2.4 안내기능 Sequence 다이어그램 작성 1.4.1.1.3.2.5 안내기능 기초 구현 1.4.1.1.4 경로/안내기능 프로그램 구현 1.4.1.1.4.1 경로기능 S/W 구현 1.4.1.1.4.2 안내기능 S/W 구현 1.4.1.2 DB/시스템 인터페이스 개발 1.4.1.2.1 DB/시스템 IF 요구사항 분석
1.4.1.2.1.1 데이터베이스 모듈규격서 작성 1.4.1.2.1.2 시스템 인터페이스 모듈규격서 작성 1.4.1.2.2 DB/시스템 IF 설계
1.4.1.2.2.1 A-SMGCS 통합제어 프로그램: 데이터베이스 상세설계서 작성 1.4.1.2.2.1.1 데이터베이스 UseCase 다이어그램 작성 1.4.1.2.2.1.2 데이터베이스 Activity 다이어그램 작성 1.4.1.2.2.1.3 데이터베이스 Class 다이어그램 작성 1.4.1.2.2.1.4 데이터베이스 Sequence 다이어그램 작성 1.4.1.2.2.1.5 데이터베이스 기초구현
1.4.1.2.2.2 A-SMGCS 통합제어 프로그램: 시스템 IF 상세설계서 작성 1.4.1.2.2.2.1 시스템 인터페이스 UseCase 다이어그램 작성 1.4.1.2.2.2.2 시스템 인터페이스 Activity 다이어그램 작성 1.4.1.2.2.2.3 시스템 인터페이스 Class 다이어그램 작성 1.4.1.2.2.2.4 시스템 인터페이스 Sequence 다이어그램 작성 1.4.1.2.2.2.5 시스템 인터페이스 기초구현 1.4.1.2.3 연동시험
1.4.1.2.3.1 연동시험 결과서 작성 1.4.1.2.4 DB/시스템 IF 구현
1.4.1.2.4.1 A-SMGCS 통합제어 프로그램: 데이터베이스 명세서 작성 1.4.1.2.4.2 A-SMGCS 통합제어 프로그램: 시스템 인터페이스 S/W 구현 1.4.1.2.5 통합시험
1.4.1.2.5.1 통합시험 결과서 작성 1.4.1.3 종합검증 및 실증
1.4.1.3.1 최종시제품 제작 1.4.1.3.1.1 경로기능 시제품 제작 1.4.1.3.1.2 안내기능 시제품 제작 1.4.1.3.1.3 A-SMGCS 통합제어 프로그램 시제품 제작 1.4.1.3.2 종합검증시험
1.4.1.3.2.1 종합검증시험 결과서 작성 1.4.1.3.3 1차 실증보고서 작성
1.4.1.3.3.1 1차 실증보고서(기본 기능) 작성 1.4.1.3.4 2차 실증보고서 작성
1.4.1.3.4.1 2차 실증보고서(Level IV급 기능) 작성 1.4.1.3.5 3차 실증보고서 작성
1.4.1.3.5.1 3차 실증보고서(성능 시험) 작성 1.4.1.4 매뉴얼 작성
1.4.1.4.1 통합시스템 매뉴얼 작성 1.4.1.4.2 통합시스템 사용자 매뉴얼 작성 1.4.1.4.3 통합시스템 유지보수 매뉴얼 작성
1/2차 실증 3차 실증
2014 2016 2017 2018
Stage I Stage II Stage III Stage IV Stage V
1 2 3 4 5 6
요구도 정의 및 기본설계 기초구현 상세구현
1 2 3 4 5 6
7 8 9 101112 7 8 9101112 1 2 3 4 5 6 7 8 9 1011121 2 3 4 5 6 7 8 9 101112 1 2 3 4 5 6 7
▼ORR ▼SRR ▼SFR 연동시험▼ ▼PDR 통합시험▼ ▼CDR TRR▼▼종합검증 ▼1차 TBSVR▼▼2차 TB SVR▼▼3차 T-B SVR▼
▼경로기능 상세설계서
▼안내기능 상세설계서
▼통합제어 프로그램 상세설계서
▼경로기능 S/W 시제품/내부시험성적서
▼안내기능 S/W 시제품/내부시험성적서
▼1차 실증시험 보고서, 기본기능구현/기능시험 성적서
▼2차 실증시험 보고서, B-2-③ Level IV급 적용 성능구현/기능시험
▼3차 실증시험 보고서
▼통합제어 프로그램 S/W 시제품/내부시험성적서
▼운영개념서 개정안
▼시스템규격서 개정안
▼경로/안내기능, 통합제어프로그램 시험절차서
▼경로/안내기능 통합시험 성적서
▼경로/안내기능 시험 및 검증절차서
▼경로, 안내기능, 통합제어 프로그램 통합시험절차서
▼통합시스템 매뉴얼
▼통합시스템 사용자 매뉴얼
▼통합시스템 유지보수
▼1차 테스트베드 구축 검증보고서▼2차 테스트베드 구축 검증보고서
그림 12. 통합일정계획
Fig. 12. Integrated master schedule.
그림 11. 업무분해구조 예시
Fig. 11. Work breakdown structure example.
도출된 요구사항이 시스템의 각 기능, 성능 등으로 정의되 고, 구현되기 위해서는 시스템, 하부시스템 및 단위모듈 등 적 절한 구성요소로 할당 및 분석되어야 한다. 앞서 도출된 요구사 항은 그림 10의 시스템 규격 트리에서 적합한 규격으로 할당되 고, 해당 규격 내에서 구체적으로 정의되어 해당 기능, 성능 등 으로 구현된다.
4-3 WBS & IMS 수립
WBS는 프로젝트의 범위에 따른 세부업무를 분할한 계층적 구조도를 의미한다. 프로젝트의 범위와 업무를 세부적으로 분
해하지 않고 수행하게 되면 주어진 기간 동안 체계적인 연구를 수행할 수 없으며, 비용 증가, 일정 지연, 낮은 수준의 결과물 등 이 원인이 되어 프로젝트의 실패를 가져올 수 있다.
이에 따라, 시스템 개발초기 단계에 WBS를 수립하였고, 상 세한 업무까지도 관리할 수 있도록 레벨 7까지 분할하였다. 시 스템에서 수립한 WBS 예시는 그림 11과 같다.
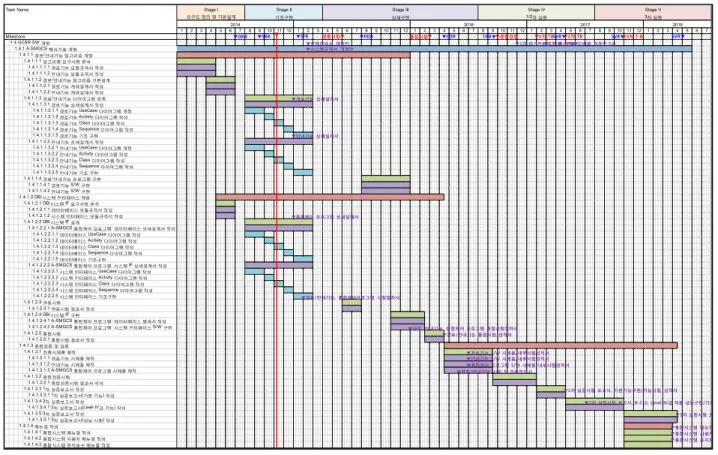
시스템 개발에 대한 전반적인 사업진도 및 일정관리를 위해 WBS를 활용하여 IMS를 수립하였으며, 그림 12와 같다.
IMS 구조는 주요 일정 (milestone), 활동 (task), 작성기관 및
작성자 (role and responsibility), 선행작업 (prerequisite), 산출물
(product) 등으로 구성된다.
그림 15. 시스템 시험평가 계획
Fig. 15. System test and evaluation plan.
운영 요구사항(Operational Requirements) 적용문서
(Document) 요구사항 ID 기술 요구사항(Technical Requirements) 적용문서
(Document) 적용/미적용 미적용 사유 미적용 근거 적합성 검증기준 검증방법
(MOC) 입증자료
GEN_Serv-01Primary Functions
An A-SMGCS should support the following primary functions:
a) Surveillance b) Routing c) Guidance d) Control
2-D111 4.3 ICAO Doc 9830 2.2.1
Func_GEN-01 Surveillance
For all levels of implementation, the ASMGCS should provide equipment to support the Surveillance service.
GEN_Serv-01
[ICAO §2.2.1] 적용 A-SMGCS는 감시, 경로, 안내, 통제기능을 제공하
여야 한다. I,D
시스템규격서 통합시스템구 현
GEN_Serv-02Planning Function
In order to achieve the maximum benefits of each level of A-SMGCS implementation, a supporting planning function should be included.
2-D111 4.3 ICAO Doc 9830 2.2.2
Func_GEN-04 Planning
For higher levels of implementation, the ASMGCS should also provide equipment to support the planning of surface movements.
GEN_Serv-02 [ICAO §2.2.2] 적용
A-SMGCS는 계획기능을 제공하여야 한다.
-20분이상의 선택된 시간에 대한 전략적(strategic) 계획 제공
-20분이상의 선택된 시간에 대한 사전 전술(pre- tactical) 계획 제공
-현재 교통상황에서 전술(tatical)계획 제공 I,T
경로기능 상 세설계서 통합시험 결
과보고서
GEN_Serv-05Modularity
A-SMGCS should be modular so that the appropriate level of service can be provided to different aerodromes as well as to different areas of an aerodrome.
2-D111 4.3 ICAO Doc 9830 2.2.5 EUROCAE-MASPS 1.8.2
Func_GEN-06 Modularity 1
The A-SMGCS equipment should comprise hardware and
software modules. ED-87B §1.8.2 적용 A-SMGCS 장비는 하드웨어와 소프트웨어 모듈로
구성되어야 한다. I 시스템아키텍
쳐
GEN_Serv-14Susceptibility
The system should not be affected by:
a) Radio interference, including that produced by avigation, telecommunications and radar facilities (including airborne equipment);
2-D111 4.3 ICAO Doc 9830 2.6.5
Func_GEN-28 EMI/EMC
Equipment should have appropriate EMI/EMC characteristics for operation in an airport environment.
The EU directive 98/336/EEC is applicable.
GEN_Serv-14a
[ICAO §2.6.5.a] 적용 a) EMI/EMC : EU directive 98/336/EEC T EMI/EMC 시
험성적서
GEN_Serv-15System Status Equipment that shows control data should be both fail- safe and fail-soft.
2-D111 4.3
ICAO Doc 9830 2.6.9.1 적용 안전작동(fail-safe) 및 기능회복(fail-soft) 설계 T 통합시험 결
과보고서 GEN_Serv-16Failure Effect
In case of a failure of an element of an A-SMGCS, the failure effect should be such that the status is always in the ‘safe’ condition.
2-D111 4.3
ICAO Doc 9830 2.6.9.2 적용 안전작동(fail-safe) 및 기능회복(fail-soft) 설계
GEN_Serv-18Self-Restartable An A-SMGCS should be self-restartable. The recovery time should be a few seconds.
2-D111 4.3
ICAO Doc 9830 2.6.9.4 적용 자가진단시스템
재시작 회복시간 60초 이내 T 통합시험 결
과보고서
GEN_Perf-03 Velocity
The A-SMGCS should be able to accommodate the following speeds determined to within ± 2 km/h (1 kt):
a) 0 to 93 km/h (50 kt) for aircraft on straight taxiways;
b) 0 to 36 km/h (20 kt) for aircraft on taxiway curves;
c) 0 to 150 km/h (80 kt) for aircraft on runway exits;
d) 0 to 460 km/h (250 knots) for aircraft on final approach, missed approach and runways;
e) 0 to 150 km/h (80 kt) for vehicles on the movement area; and
f) 0 to 20 km/h (10 kt) for aircraft and vehicles on stands and stand taxi lanes.
2-D111 4.3 ICAO Doc 9830 4.1.1.8
Perf_SURV-09 Velocity Range
The surveillance equipment should be capable of detecting and tracking targets within the following velocity ranges:
• 0 to 250 kt for aircraft on final approach, missed approach and runways
• 0 to 80 kt for aircraft on runway exits
• 0 to 80 kt for vehicles on the movement area
• 0 to 50 kt for aircraft on straight taxiways
• 0 to 20 kt for aircraft on taxiway curves
• 0 to 10 kt for aircraft on stands and stand taxi lanes
• Any direction of movement.
GEN_Perf-03 [ICAO §4.1.1.8]
SURV_Perf-02 [ICAO §4.1.1.7]
적용
아래에 규정된 속도에서 ±2km/h(1kt)이내로 수용 하여야 한다.
∙ 직선 유도로 상의 항공기는 0~93km/h(50kt)
∙ 유도로 곡선구간에서의 항공기는 0~36km/h(20kt)
∙ 활주로 출구시 항공기는 0~150km/h(80kt)
∙ 최종접근, 실패접근, 그리고 활주로 상의 항공기 는 0~460km/h(250kt)
∙ 이동지역상의 차량은 0~150km/h(80kt)
∙ 주기장과 주기장 taxilane상의 항공기와 차량은 0~20km/h(10kt)
T 통합시험 결
과보고서 요구사항 ID
그림 14. 적합성점검표
Fig. 14. Compliance checklist.
주요 일정에는 SRR, SFR, PDR, CDR, TRR 등 기술 검토회 의를 표기하여 이를 기준으로 한 전체적인 진도 및 일정도 조정 할 수 있도록 하였다. 또한, IMS는 일정관리 뿐 아니라, 산출물 식별을 통해 성과관리도 할 수 있으며, 수행업체간의 인터페이 스 관리도 가능하게 한다.
4-4 시험평가기본계획 수립
적합성 검증 프로세스는 그림 13과 같이 SE의 V-모델 개념 을 적용하였다. 개발단계 모듈시험에서는 단위모듈 요구사항 에 대한 만족여부를 확인하고, 연동 및 통합시험에서는 모듈규 격서 내에 있는 하부시스템 요구사항의 만족여부를 확인한다.
마지막으로, 종합검증 및 실증시험에서는 시스템 규격서 내 시 스템 요구사항에 대한 만족여부를 확인한다.
개발단계별 적합성 검증을 위한 준비, 계획, 의사결정 사항 등에 대한 참여기관간의 공식적인 합의를 도출하기 위하여 월 간 공정회의 및 기술공유회를 활용하고 있다. 또한, 연구 진행 사항 및 주요 성과물 등 대하여 외부 전문가 검토를 추진하기 위한 기술 검토회의 계획을 수립하였다.
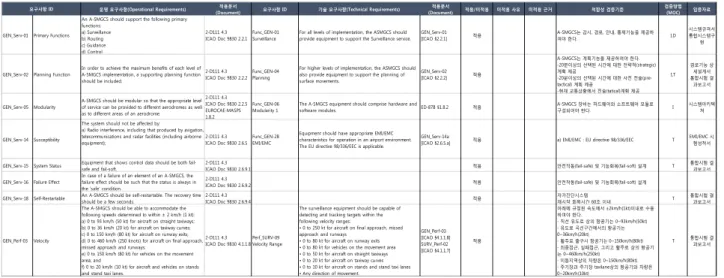
적합성 검증항목은 앞서 분석한 517개 요구사항이 된다. 적
합성 검증항목에 대하여 ‘적용’ 또는 ‘미적용’ 항목을 구분하 였다. ‘미적용’ 항목은 주로 일반사항이거나 개발범위에서 제 외된 것으로, ‘적용’항목은 347개로 분석되었다.
적합성 검증 ‘적용’항목에 대하여 운영개념서, 레벨 IV 기능 및 성능 요구사항, 그리고 기타 관련 규격 등을 토대로 하여 평 가기준을 수립하였다.
각 평가기준에 대하여 적절한 MOC를 선택하였고, 대부분 문서검사, 해석, 데모, 시험으로 선택되었다.
그림 14에서 보는 바와 같이, 적합성 검증항목, 검증방법, 입 증자료 등을 관리하고 점검할 수 있는 CCL을 작성하였다.
한편, 적합성 검증방법에서 시험으로 분류된 검증항목들에 대해서는 시험평가를 실시해야 한다. 단위모듈시험, 연동시험, 통합시험, 종합검증, 3차에 걸친 실증시험에 대한 시험평가계 획을 수립하였다. 시험평가 일정은 그림 15와 같다. 이에 대한 시험평가 개요, 체계, 조직, 일정, 계획 및 소요자원 등에 포함한 TEMP를 작성하였다.
Ⅴ. 결 론
A-SMGCS의 성공적인 개발과 함께 시스템의 안전성과 신뢰 성을 보장하기 위해서는 개발 전 단계에서의 적합성 검증이 요 구된다. 본 연구에서는 체계적이고 효율적인 적합성 검증방안 을 수립하기 위하여 SE 프로세스를 도입하였다.
레벨 Ⅳ급 A-SMGCS를 개발하기 위해 시스템 요구사항을
도출하였고, 시스템 요구사항을 시스템의 기능, 성능 및 인터페
이스 요구사항으로 할당하였으며, 시스템의 아키텍처 및 인터
페이스를 정의하였다. 프로젝트의 범위에 따른 세부업무를 분
할한 계층적 구조도인 WBS와 일정관리를 위한 IMS를 수립하
였다. SE의 V-모델을 적용하여 적합성 검증 프로세스를 수립하
였고, 적합성 검증항목, 검증방법, 입증자료 등을 관리할 수 있
는 CCL을 작성하였다. 이를 토대로 시스템 적합성 검증을 위한 시험평가기본계획인 TEMP를 수립하였다.
향후 수립된 TEMP를 기반으로 시험평가 세부계획 수립, 시 험절차서 개발 등 개발단계별 적합성 검증을 수행할 계획이다.
감사의 글
본 연구는 국토교통부 항공안전기술개발사업 연구비지원 (14ATRP-C069188-02)에 의해 수행되었습니다.
참고 문헌
[1] Advanced surface movement guidance and control system manual, International Civil Aviation Organization, Montreal,
Canada: Doc 9830 AN/452, 2004.
[2] System Engineering Fundamentals, Fort Belvoir, VA: Defense Acquisition University Press, 2001.
[3] S. G. Min, Systems Engineering, 2nd ed, Seoul, Korea: System Engineering Institute Press, 2007.
[4] C. Haskins, M. Krueger, D. Walden, and R. D. Hamelin, System Engineering Handbook, v 3.2.2, San Diego, CA:
International Council on Systems Engineering, 2011.
[5] System engineering based technology management practice guidelines for research and development, Defense Acquisition Program Administration, Seoul, Korea: 2012.
[6] Military aircraft airworthiness certification service provision, Defense Acquisition Program Administration, Seoul, Korea:
2009.
설 은 숙 (Eun-Suk Seol)
2011년 : 한서대학교 항공운항관리학과 (이학석사)
2014년 2월 ~ 현재 : 한국산업기술시험원 시스템융합본부 연구원
※ 관심분야 : 항공교통, 공항운용시스템, 시험평가, 적합성 검증
김 상 헌 (Sang-Hun Kim)
1998년 : 한양대학교 정밀기계공학과 (공학박사)
1990년 01월 ~ 현재 : 한국산업기술시험원 시스템융합본부 수석연구원
※ 관심분야 : 항공교통, 기술기준 및 표준화, 적합성 검증, 시험평가
구 성 관 (Sung-Kwan Ku)
2014년 : 한국항공대학교 항공교통물류학과 박사수료 2014년 2월 ~ 현재 : 한서대학교 항공레저산업학과 조교수
※ 관심분야 : 항공교통, 시험인증, 시뮬레이션, 안전성평가
조 정 현 (Jeong-Hyun Cho)
2008년 : 한양대학교 기계공학과 (공학박사)2014년 6월 ~ 현재 : 한국산업기술시험원 시스템융합본부 선임연구원
※ 관심분야 : 항공교통, 시험평가, 적합성 검증, 모델링&시뮬레이션