동적보행을 위한 생체모방형 4족 보행로봇 AiDIN의 개발
Development of Quadruped Walking Robot AiDIN for Dynamic Walking
강 태 훈1·송 현 섭2·구 익 모3·최 혁 렬†
Tae Hun Kang1·Hyun Sup Song2·Ig Mo Koo3·Hyouk Ryeol Choi†
Abstract In this research, a comprehensive study is performed upon the design of a quadruped walking robot.
In advance, the walking posture and skeletal configuration of the vertebrate are analyzed to understand quadrupedal locomotion, and the roles of limbs during walking are investigated. From these, it is known that the forelimbs just play the role of supporting their body and help vault forward, while most of the propulsive force is generated by hind limbs. In addition, with the study of the stances on walking and energy efficiency, design criteria and control method for a quadruped walking robot are derived. The proposed controller, though it is simple, provides a useful framework for controlling a quadruped walking robot. In particular, introduciton of a new rhythmic pattern generator relieves the heavy computational burden because it does not need any computation on kinematics. Finally, the proposed method is validated via dynamic simulations and implementing in a quadruped walking robot, called AiDIN(Artificial Digitigrade for Natural Environment).
Keywords:Biomimetic, Digitigrade, Quadruped Walking Robot
1. 서 론1)
다양한 환경에서 뛰어난 이동능력과 환경 적응력을 갖는 4족 보행로봇은 많은 분야에서 응용될 수 있을 것 이라고 기대되었다. 비록 많은 과학자들이 4족 보행로봇 의 설계와 보행제어에 대한 몇몇 해결책을 제시하였지 만, 적절한 기계적 메커니즘과 그것의 제어방법에 대한 해결책이 아직까지도 로봇 개발에 있어 가장 큰 문제들 로 남아있다. 아울러, 대부분의 4족 보행로봇들은 기존 의 바퀴형 로봇(wheeled or tracked robot)의 역할에 많은 부분이 부족한 것이 사실이다.
부정지 환경(uneven terrain)에서 로봇의 이동능력과 기동력(maneuverability)을 향상시키기 위하여 최근 자주 거론되는 학문들 중 생체모방학(biomimetics)은 가장 대 표적인 것이다. 특히, 살아있는 생명체를 모방하는 것은 로봇의 기구학적 설계뿐만 아리라 제어기 설계를 위한
※ 이 논문은 2005년 정부(교육인적자원부)의 재원으로 한국 학술진 흥재단의 지원을 받아 수행된 연구임(KRF-2005-202-D00031).
1 포항지능로봇연구소 선임연구원
2 성균관대학교 기계공학과 석사과정
3 성균관대학교 기계공학과 박사과정
†교신저자:성균관대학교 기계공학부 교수
많은 모델과 개념들을 제공하기 때문에 로봇 연구자들 에게 있어 생체모방학은 로봇 기술혁신을 이루기 위한 중요한 분야로 주목받고 있다. 이러한 흐름을 반영하듯 이, 최근 많은 로봇 연구자들은 로봇을 개발함에 있어 동물의 골격 구조뿐만 아니라, 그들의 제어 시스템까지 도 모방하려는 노력을 기울이고 있다[1-3]. 예를 들어, 동물의 CNS(central nervous system)를 모방한 제어 시스 템 설계와 주기적인 파형 생성을 하는 CPG(central pattern generator)를 이용한 보행 패턴 생성 등과 같은 생물학적 모방 제어 전략들이 제시되고 있다[4][5].
최근까지 몇몇 연구자들은 생체모방학에 근거한 4족 보행로봇의 다리구조와 보행자세 결정에 대한 연구를 진행하였으며, 그들이 돌출한 보행동물의 기구학적 구조 와 보행자세를 로봇에 적용하려고 노력하였지만, 이러한 노력에도 불구하고 지금까지 소개되어진 대다수의 보행 로봇들은 다양한 환경에서의 충분한 환경 적응능력을 가지고 있지 못하다. 일반적으로, 동물의 보행이나, 새의 날갯짓, 그리고 물고기의 유영(swimming) 등은 대표적 인 CPG의 결과물로 잘 알려져 있고, 많은 연구자들이 이러한 주기적인 운동을 수학적으로 정리하기 위하여 신경뉴런과 운동뉴런 등에 대하여 깊이 있게 연구하여
왔다[6][7]. 아울러, 로봇 연구자들은 4족 보행로봇의 적 절한 보행 제어를 위하여 뉴런모델을 보행로봇에 적용 하였고, 다양한 형태의 제어전략 또한 제시하였다[4][5].
그러나 이러한 뉴런 형태의 제어기들은 동물의 움직임 을 부분적으로 설명할 수는 있으나, 로봇 시스템에 적용 할 시에는 실제동물의 거동을 모방하기에는 매우 부족 한 점이 있다는 것으로 나타났다.
본 논문에서는 앞에서 언급한 문제점들을 보완하기 위하여 생체모방학에 근거한 4족 보행로봇의 설계 및 개발을 위하여 다양한 관점의 논의를 하고자 한다. 또한, 이를 바탕으로 간단하면서도 효과적인 4족 보행로봇의 제어전략을 제안하고, 이를 적용하여 동적보행이 가능한 4족 보행로봇 AiDIN(Artificial Digitigrade for Natural Environment)을 소개하도록 한다.
2. 4족 보행동물의 생체모방학적 관찰
2.1 보행 중 앞과 뒷다리의 역할
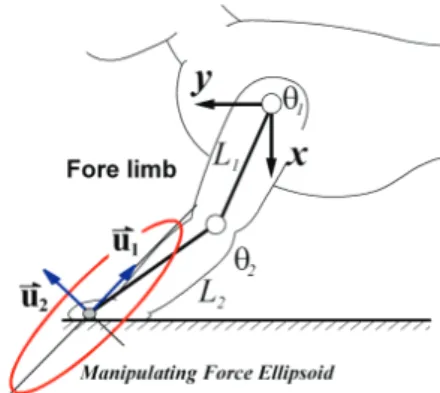
그림 1에서 보이는 것과 같이, 4족 보행동물이 보행하 는 동안, 지행류(digitigrade) 포유동물의 측면 모습을 관 찰하면 앞다리와 뒷다리의 독특한 역할을 이해 할 수 있 다. 이들의 무게 중심은 앞 몸통 부분에 위치하기 때문 에 앞다리는 대부분의 질량을 지지하는 역할과 몸체가 앞으로 진행하는 것을 돕는 역할을 한다. 반면에, 그림 1 에서 보이는 것처럼, 지행류 포유동물의 뒷다리는 몸무 게의 40% 정도만을 지지하게 된다. 이러한 이유로 뒷다 리는 앞다리 보다 자유롭게 움직일 수 있으며, 보행에서 필요로 하는 대부분의 추진력을 생성하는 역할을 하게 된다. 이 장에서는 Manipulating Force Ellipsoid(MFE) 이론[8]을 활용하여 지행류 동물의 앞과 뒷다리가 갖고 있는 독특한 역할을 설명하도록 한다.
(a)
(b)
그림 1. (a)보행 중 앞다리와 뒷다리의 서로 다른 역할, (b)측면에서 본 애완견의 보행
그림 2. 앞다리의 기구학적 구조
지행류 포유동물의 앞다리 또는 뒷다리는 그림 2에서 보이는 것과 같이 각각 2자유도 시스템으로 모델링 될 수 있다. 또한, 각각의 링크 길이는 Manipulability[8]를 이용하여 최적화 할 수 있으며 링크 길이 과 는 동 일한 길이 로 결정지을 수 있다. 또한, 그림 2로부터 자코비안(jacobian) 는 식 (1)과 같이 얻을 수 있다.
(1) 여기서,
1 1Δcosθ
c ,s1Δsinθ1,c12Δcos(θ1+θ2),s12Δsin(θ1+θ2)
의 Singular Value Decomposition(SVD)을 이용하 여 고유값 와 단위 고유벡터 에 관하여 정리하면 다 음과 같이 나타낼 수 있다.
±
(2)
(3) 여기서,
ki=[{(s1+s12)(c1+c12)+s c12 12}2 {(s1 s12)2 s122 L2i} ]2 1/ 2
+ + + −λ
그림 3. Manipulating Force Ellipsoid
결론적으로 MFE의 2개 주축(principal axes)은
와 같이 결정된다. 예를 들어, 그림 3에서 보행 중 앞다 리가 타원형 궤적을 갖는다고 가정하면 지면을 지지하 는 상태(ST: supporting mode)를 구간 Ⓐ부터 Ⓑ 그리고
Ⓒ로 결정할 수 있다. MFE의 변화를 살펴보면, 주축의 방향이 어깨관절(scapular joint)을 향하고 있다는 것을 알 수 있다. 아울러, 뒷다리의 경우 주축의 방향이 엉덩 이 관절(hip joint)을 향한다는 것을 알 수 있다. 이것으 로 부터 지행류 동물의 골격구조는 보행을 하는 동안 에 너지 소모를 최소로 하기 위한 최적의 형태라는 결론을 내릴 수 있다[13].
2.2 보행 중 다리의 자세
일반적으로 보행 시 지지하는 발사이의 폭이 넓은 경 우가 폭이 좁은 것 보다 안정적으로 보행 할 수 있을 것 이라 생각한다. 그러나 이러한 가정은 정적보행(static walking)을 할 경우에 적용이 가능하지만 동적보행 (dynamic walking)의 경우에는 적용하기가 어렵다. 이러 한 것은 보행동물의 거동을 면밀히 관찰함으로써 쉽게 이해할 수 있다. 예를 들어, 겨울철 눈 위에 찍혀있는 동 물의 발자국을 유심히 관찰하면, 그림 4와 같이 몸 크기
(a)
(b)
(c) 그림. 4 (a)척행류, (b)지행류, (c)유재류
그림 5. 지면에 닿는 발 사이의 간격과 지면 반발력 사이의 관계를 알기위한 역진자 모델
에 비해서 발자국의 폭이 매우 좁다는 것을 알 수 있다.
또한, 동물은 보행 할 때 몸의 좌우방향으로의 흔들림이 거의 나타나지 않는다는 것을 알 수 있다. 이러한 독특 한 현상은 지금까지 보고되었던 4족 보행로봇의 연구 결과와는 매우 상이한 것이다[2][3]. 즉, 동물들은 보행 중 에너지 소비를 최소화하여 최소의 힘 또는 토크로 자 신의 몸을 제어하기 위하여 이러한 독특한 보행 자세를 유지한다는 것이다.
위와 같은 관찰로부터, 우리는 4족 보행동물들은 보 행 시 작은 발폭을 유지하여, 몸의 흔들림을 최소화 시 켜 안정적인 보행을 가능하게 한다는 것을 알 수 있다. 본 논문에서는 이러한 4족 보행동물의 독특한 보행 자 세를 좀 더 체계적으로 이해하기 위하여 그림 5에서 보 이는 것과 같은 역진자 모델을 이용한 시뮬레이션을 수 행하였다. 시뮬레이션 모델은 하나의 점 질량(point mass)이 길이 을 갖는 두 개의 가상 링크(two massless link)로 연결되어 있다.
시뮬레이션 모델에서 지면과 다리 (Ⓐ와 Ⓑ) 사이에 미끄러짐이 없다고 가정하면, 운동방정식은 다음과 같이 유도된다.
(4)
(5) 그리고 질량 의 가속도는 다음과 같이 얻어진다.
(6)
(7)
(8)
따라서 식 (7)과 (8)을 식 (4)와 (5)에 각각 대입함으로 써 지면 반발력 와 를 식 (9)와 (10)과 같이 계산할 수 있다.
(9)
(10) 여기서, 는 접촉점 Ⓐ에서 질량 의 각속도이며, 는 중력 가속도, 는 수평면부터 접촉점 Ⓐ와 연결된 링크 사이의 각도이다. 아울러 시뮬레이션의 초기 조건은
, , , 이다.
그림 6은 보행 중 4족 보행동물의 발폭과 지면 반발 력 사이의 관계를 나타낸다. 지면 반발력의 관점에서 살 펴보면, 발폭이 좁은 경우가 발폭이 넓은 경우에 비하여
그림 6. 발폭 변화에 따른 지면 반발력 사이의 관계
작은 지면 반발력이 발생한다는 것을 알 수 있다. 아울 러, 발폭이 좁을수록 몸이 넘어지는 것을 작은 힘으로도 쉽게 제어할 수 있다는 결론을 얻을 수 있다. 따라서 우 리는 지행류 포유동물이 보행 시 자신의 몸을 최소한의 에너지로도 효율적으로 제어하기 위해서 발폭을 좁게 사용한다는 것을 알 수 있다. 또한, 그림 6으로부터 지행 류 동물은 보행 시 에너지의 소비를 줄이기 위하여 다리 의 폭을 좁히더라도 다리를 움직이거나 몸의 자세를 변 경하는데 필요로 하는 시간을 충분히 확보할 수 있으며 이로부터 안정적인 보행이 가능하다는 것을 확인 할 수 있었다.
3. 보행 패턴제어기
동물의 움직임은 그것을 구성하는 근육들의 미세한 움직임에 의하여 구현된다. 근육들이 임의의 운동을 생 성할 때, 그것들의 제어 시스템은 크게 2개의 루프로 이 루어진다. 첫 번째 루프에서, 운동 명령은 중앙신경계 (CNS: Central Nervous System)를 통하여 뇌로부터 근육 으로 전달되며, 두 번째 루프에서는 근육이 외부의 자극 에 의해서 무조건 반사를 보이는 루프이다. 이러한 외부 자극들은 자기 수용기(proprioceptor) 또는 외부 수용기 (exteroceptor)에 의하여 정보가 수집되며 그 정보는 근 육 또는 뇌로 전달된다. 비록 이러한 일련의 과정이 복 잡한 구조로 이루어져 있지만, 최종적으로 근육에 의하 여 생성되는 운동은 근육의 굽힘(flexion)과 펴짐 (extension)의 조합으로 구현될 수 있다.
본 장에서는 앞에서 언급된 자극과 반응의 메커니즘 을 기본 아이디어로 하는 Gravity Load Controller(GLC) 라는 보행제어기를 제안한다. 그림 7에서 4족 보행로봇 의 제어를 위한 GLC가 소개되어있다. 이것은 크게 파형 발생기(oscillator), 자극기(stimulatory part), 문턱값 감지
그림 7. GLC를 구성하는 파형 발생기, 자극기, 문턱값 감지기, 그리고 PD제어기
기(threshold detector), 그리고 PD제어기로 구성되다. 아 울러, 제안된 제어기는 문턱값 감지기의 결과에 따라 결 정되는 2개의 제어루프 (exceeding loop, nonexceeding loop)를 갖는다. 만약, 힘 센서, 자세 센서 또는 접촉센서 로부터 측정된 정보가 문턱값을 초과할 경우, 자극기는 신근(extensor)을 자극하게 되며, 이때 단속적인 자극 신 호가 발생하게 된다. 반면, 센서 신호가 문턱값 보다 작 은 경우 신근은 비활성 상태로 된다. 이러한 일련의 과 정은 2개의 제어루프를 유동적으로 생성하게 된다. 그림 7에서 신근과 굴근(flexor)은 식 (11)과 (12)에서 보이는 연합신경세포(interneuron) 또는 로 연결된다.
(11)
(12) 여기서,
contact with ground
in supporting mode otherwise
contact with ground
in supporting mode otherwise
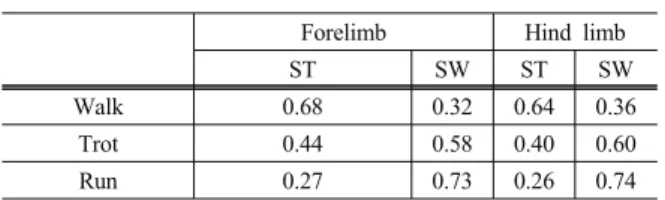
그림 7에서 사용되는 파형 발생기는 4족 동물의 보행 시 SW(swing mode)와 ST(supporting mode) 사이의 관계 (표 1)를 바탕으로 하며, 아울러 제안된 파형 발생기
Forelimb Hind limb
ST SW ST SW
Walk 0.68 0.32 0.64 0.36
Trot 0.44 0.58 0.40 0.60
Run 0.27 0.73 0.26 0.74
표 1: 보행 중 SW와 ST의 비율
(다리 의 관절)는 개의 제어점을 갖는 Bezier 곡선을 이용하여 식(13)과 같이 구현된다.
(13)
여기서, 는 Bezier 곡선의 제어점
식 (13)으로부터 설계된 4족 보행로봇의 파형 발생기 로부터 관절을 제어하기 위한 (다리 의 관절 )가 식 (14)와 같이 결정된다.
(14)
4. 동적 시뮬레이션
4.1 시뮬레이션 모델
본 절에서는 앞에서 분석되고 제안된 내용들에 대한 타당성을 검증을 위하여 4족 보행로봇에 대한 동적 시 뮬레이션을 수행하였다. 시뮬레이션의 기본 구성은 강체 운동을 구현 할 수 있는 ODE(open dynamic engine)[11]
를 기반으로 하였으며 그림 8이 그것을 보이고 있다.
시뮬레이션 모델의 다리 구조는 지행류 포유동물의 형태를 모방하였으며, 다리의 길이는 앞서 언급한 Manipulability 이론으로부터 결정되었다. 특히, 앞다리 는 그림 8의 어깨관절 Ⓐ, 무릎관절 Ⓑ 그리고 쇄골관절
Ⓖ을 포함한 3자유도를 가지고 있으며, 쇄골관절에 있는 조인트는 보행 중 발 사이의 폭을 조정하기 위한 것이 다. 또한 지행류 동물의 무게 중심이 앞쪽에 위치한다는 것을 고려하기 위하여, 그림 8과 같이 의 질량 Ⓕ를 덧붙였다.
그림 8. 시뮬레이션에 사용된 보행로봇의 기구학적 구조
시뮬레이션이 수행된 환경은 그림 9와 같이 아무런 장애물이 없는 평탄한 환경, 의 오르막과 내리막이 있는 경사면 환경, 의 장애물이 간격으로 놓여 있는 장애물 환경, 그리고 울퉁불퉁한 지면을 갖는 복잡 한 지형환경인 4가지가 사용되었다.
그림 9. 시뮬레이션 환경
4.2 보행 효율
제안된 로봇의 보행 자세와 제어기의 성능을 비교 및 평가하기 위하여, 비저항(ε, specific resistance)을 사용 하여 보행 효율을 측정하였다[12]. 일반적으로, 비저항은 식 (15)와 같이 정의된다.
(15)
여기서 는 거리 을 이동하는 동안 소모되는 기계적 에너지 소비이며, 은 로봇의 전체 질량 그리고 는 중 력 가속도이다. 또한 이것은 식 (16)에서와 같이 시간에 대한 관절에서의 토크와 각속도의 관계로부터 얻을 수 있다.
(16) 여기서 와 는 다리 의 관절 의 토크와 각속도이 다.그림 10은 다양한 환경에서 이동 거리에 따른 비저항 의 변화를 보인다. 이로부터, exceeding loop의 효율이 nonexceeding loop 보다 높다는 것을 알 수 있으며, 한 가지 특이한 점은 보행 초기에 에너지 효율이 매우 좋지 않다는 것인데, 시간이 경과함에 따라 로봇은 스스로 환 경에 적응하며 에너지 효율 또한 일정 범위에서 유지되 는 것을 알 수 있다. 이것은 로봇의 제어기가 동역학적
(a)
(b)
그림 10. (a) 이동거리에 따른 비저항의 변화 (b) 이동거리에 따른 몸체의 흔들림 변화
으로 안정화된 상태를 유지한다는 것을 의미한다. 아울 러, 우리는 보행형태에 따른 보폭 주기와 비저항에 대한 관계를 그림 11과 같이 얻을 수 있었다. 이로부터, 동물 이 보행 형태를 다양하게 바꿔가며 보행을 하는 이유는 그들 스스로가 보다 높은 에너지 효율의 보행을 유지하 기 위한 것이라는 것을 알 수 있다.
그림 11. 보폭주기와 비저항의 관계
5. 4족보행 로봇 AiDIN-I
본 논문에서는 앞서 분석 및 제안된 연구들을 바탕으 로 그림 12와 같이 4족 보행로봇인 AiDIN-I(Artificial Digitigrade for Natural Environment Version 1)을 개발하 였다. AiDIN-I의 다리는 3자유도의 능동 관절로(active
joint) 구성되며, 각각 3개의 DC 모터(20 watt, 53 gear ratio)로 구동된다.
5.1 시스템의 구성
AiDIN의 앞다리는 어깨관절에 결합되어 있는 구조로 이루어져 있다. 이 관절은 보행 중 발폭에 다양한 변화 를 줄 수 있어 앞에서도 언급한 바와 같은 4족 동물의 보행 형태와 매우 유사한 보행을 할 수 있으며, 보행 에 너지 효율 또한 높일 수 있다는 장점이 있다. 또한, 뒷다 리는 무릎 관절에 소형 클러치를 내장하고 있는 매우 특 별한 구조로 이루어져있다. 이는 발목을 수동 또는 능동 관절로 변환시킬 수 있는 역할을 하게 된다. 발과 정강 이뼈 사이에 연결된 스프링은 발이 땅에 충돌할 때 탄성 에너지를 저장하게 되며, 이때 저장된 탄성에너지는 다 시 발이 땅에서 떨어지는 순간 스프링의 복원력에 의해 운동에너지로 바뀌게 된다. 즉, 클러치는 로봇의 보행 시 스프링에 의해 주기적으로 발생하는 운동에너지를 로봇의 추진력으로 시기적절하게 사용하기 위한 것이다.
개발된 로봇의 전체 시스템은 그림 13과 같다. 이 중 하드웨어는 크게 2개의 내장형 제어기 (embedded controller)와 12개의 마이크로 컨트롤러(PIC18f458, MicroChip Co.)로 구성된다. 두 개의 내장형 제어기 중 하나(SBC, Pentium-III 800 MHz with compact flash disk, 1Mbps CAN)는 RTLinux를 구동시키기 위하여 사 용하였으며, 이는 로봇의 보행 자세 제어 및 CAN
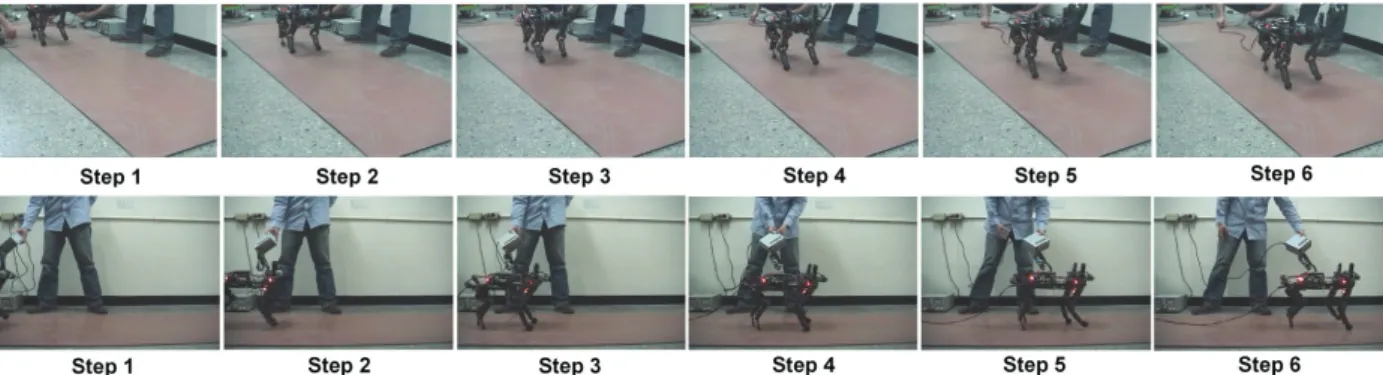
그림 14. 4족 보행로봇 AiDIN을 이용한 TROT 보행 실험 (controller area network) 통신을 이용한 마이크로컨트롤
러의 관리 등을 수행한다. 또한, 다른 내장형 제어기 (SBC, Pentium M processor 1.1 GHz )는 개발된 로봇의 멀티미디어 성능을 높이기 위하여 Windows를 구동하여
그림 12. 4족 보행로봇 AiDIN의 개요
그림 13. 시스템 구성도
음성 엔진(Speech SDK, MS Co.) 및 비전 함수(OpenCV, Intel Image Processing Library) 등을 처리 및 관리하는 역할을 수행한다. 이때, RTLinux와 Windows는 내부적 으로 인터넷을 통하여 서로 연결(cross linking)된다. 외 부 메인 PC를 통한 로봇의 전체적인 관리는 무선 랜을 통하여 이루어지며, 이는 개방된 공간에서 최대 300m 거리까지 통신이 가능한 장점이 있다.
5.2 AiDIN을 이용한 실험
본 논문에서 제안된 GLC를 4족 보행로봇 AiDIN에 적용하여 그림 14와 같이 GLC의 exceeding 루프와 nonexceeding 루프를 비교하기 위한 실험이 진행되었다.
실험에 사용된 보행방식은 TROT이며, 로봇의 보행속도 는 이다. 첫 번째의 경우, nonexceeding 루프만 이 활성화되었으며, 로봇의 보행 중 몸체의 흔들림이 매 우 크다는 것을 알 수 있다. 반면 그림 15(b)에서 보이고 있는 실험결과는 exceeding 루프가 활성화되었을 경우의 결과를 보이고 있다. 이것은 nonexceeding 루프만이 활 성화된 경우에 비해서 몸체의 흔들림이 매우 적다는 것 을 알 수 있다. 결론적으로 GLC 보행제어기는 두 가지 의 제어루프를 갖고 있으며, 특히 exceeding 루프를 활성 화할 경우 보행 효율이 높아진다는 것을 확인 할 수 있 었다.
6. 결론 및 토론
4족 보행로봇의 개발을 위해 필요한 다양한 관찰에 대한 분석을 소개하였다. 지행류 포유동물의 보행을 이 해하기 위하여, 보행 자세와 골격 구조를 분석하였으며, 동물의 보행패턴으로부터 이끌어낸 주기적인 패턴을 기 초로 하는 파형 발생기를 또한 제안하였다. 아울러, 몇 몇 환경에 대한 동적 시뮬레이션을 수행하여 제안된 제 어기의 효용성 또한 입증하였다. 이로부터, 우리는 4족 보행 동물이 보행 중 보행 형태(trot, pace, walk, running)
(a) Nonexceeding 루프만을 갖는 경우 몸체 흔들림
(b) Exceeding과 nonexceeding 루프를 갖는 경우 몸체 흔들림
그림 15. 보행 중 몸체의 흔들림
를 어떠한 이유로 변화 시키는지에 대하여 명확히 이해 할 수 있었다. 또한, 앞서 언급한 연구의 수행을 바탕으 로 노지에서 동적 보행이 가능한 4족 보행로봇인 AiDIN-I을 개발하여 제안된 방법을 검증하였다.
참 고 문 헌
[1] Karsten Berns, Winfried Ilg, M, Deck, J. Albiez, and Rűdiger Dillmann, "Mechanical Construction and Computer Architecture of the Four-Legged Walking Machine BISAM", IEEE/ASM Transactions on Mechatronics, vol.4, no.1, pp.32-38, 1999.
[2] HiroKi Takeuchi, "Development of MEL HORSE", Proceeding of the 1999 IEEE International Conference on Robotics and Automation, pp.1057-1062, 1999.
[3] Hiroshi Kimura and Yasuhiro Fukuoka, "Biologically Inspired Adaptive Dynamic Walking in Outdoor Environment Using a Selfcontained Quadruped Robot : Tekken2", Proceeding of 2004 IEEE/RSJ Inter- national Conference on Intelligent Robots and Systems, pp.986-991, 2004.
[4] G .Taga, Y. Yamaguchi, and H. Shimizu, "Self- organized control of bipedal locomotion by neural oscillators in unpredictable environment", Biological Cybernetics, Vol.65, pp.147-159, 1991.
[5] Gen Endo, Jun Morimoto, Jun Nakanishi, and Gordon Cheng, "An Empirical Exploration of a Neural Oscillator for Biped Locomotion Control", Pro-
ceedings of the 2004 IEEE International Conference on Robotics and Automation, pp.3036-3042, 2004.
[6] Kiyotoshi Matsuoka, "Mechanisms of Frequency and Pattern Control in the Neural Rhythm Generators", Biological Cybernetics, Vol.56, pp.346-353, 1987.
[7] Gunther S. Stent, William B. Kristan, Jr., W. Otto Friesen, Carol A. Ort, Margaret Poon, Ronald L.
Calabrese, "Neuronal Generation of the Leech Swimming Movement", Science, vol.200, no.23, pp.
1348-1357, 1978.
[8] Tsuneo Yoshikawa, "Manipulability of Robotic Mechanisems", International Journal of Robotics Research, vol.4, no.2, pp.3-9, 1985.
[9] Goslow G. E., Seeherman H. J., and Taylor C. R.,
"Electrical Activity and Relative Length Changes of Dog Limb Muscles as a Function of Speed and Gait,"
J. Exp. Bilo., no.94, pp.15-42, 1980.
[10] Michael E. Mortenson., "Geometric Modeling, 2and Edition", Wiley Computer Publishing Press, 1997.
[11] Rusell Smith, Open Dynamics Engine, http:// www.
ode.org
[12] R. B. McGhee, E. Nakano, N. Koyachi, and H. Adachi,
"An Approach to Computer Coordination of Motion for Energy-Efficient Walking Machines", Bulletin of Mechanical Engineering Laboratory, no.43, 1986.
[13] M. H. Dickinson, C. T. Farley, R. J. Full, M. A. R.
Koehl, R. Kram, and S. Lehman, "How Animals Move: An Integrative View," Science, April 7, pp.
100-106, 2003.
강 태 훈
2000 성균관대학교 기계 설계 학과(공학사)
2002 성균관대학교 기계 설계 학과(공학석사)
2006 성균관대학교 기계설계 학과(공학박사) 2006~현재 포항 지능로봇 연구소 선임연구원 관심분야: Biomimetics, Quadruped Walking Robot,
Field Robotics
송 현 섭
2005 경원대학교 기계공학과 (공학사)
2005~현재 성균관대학교 기계 설계학과 석사과정 관심분야: quadruped walking
robot, dynamic simulation
구 익 모
2004 명지대학교 기계공학부 (공학사)
2006 성균관대학교 기계공학과 (공학석사)
2006~현재 성균관대학교 기계공학과 박사과정 관심분야: biomimetics, quadruped walking robot,
haptic display, artificial muscle actuator
최 혁 렬 1984 서울대학교 기계과
(공학사)
1986 한국과학기술원 기계 공학과 (공학석사) 1994 포항대학교 기계공학과
(공학박사) 1995~현재 성균관대학교 기계공학부 교수 관심분야: Field Robotics, Robot Hand, Dextrous
Mechanism, Milli-Micro Robot, Artificial Muscles Actuator